Introducción
Qué es Arduino Alvik

SOFTWARE
Tienes dos opciones para programar Arduino Alvik :
- OPCIÓN A con el firmware https://alvikupdate.arduino.cc/
- LENGUAJE CÓDIGO MICROPYTHON
- LENGUAJE EN BLOQUES GRÁFICO mBlock que trabaja con Python
- OPCIÓN B reseteando bootloader
- LENGUAJE CÓDIGO ARDUINO IDE que trabaja con lenguaje C
Utiliza ArduinoIDE si ya trabajas en el aula con este lenguaje, sino, te aconsejamos Micropyhon o mBlock
👁️👁️Cambiar de una opción a otra implica resetear el Bootloader.
🫵 Es mejor que te decidas qué opción quieres, opción A o B 🫵
![2024-07-11 20_01_25-Microsoft PowerPoint - [Presentación1].png](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-11-20-01-25-microsoft-powerpoint-presentacion1.png)
HARDWARE
Es un robot con las siguientes características :
- Placa microcontroladora Las placas Arduino tradicionales tenían microcontroladores como el ATMEL MEGA 328P etc..ver micros que no estaban conectados a Internet. EL ARDUINO ALVIK LLEVA EL ESP32 un micro más potente, y con conexión Wifi y Bluetooth mira esta página del curso ESP32 de Aularagon
- Precio unos 130€
- Especificaciones técnicas
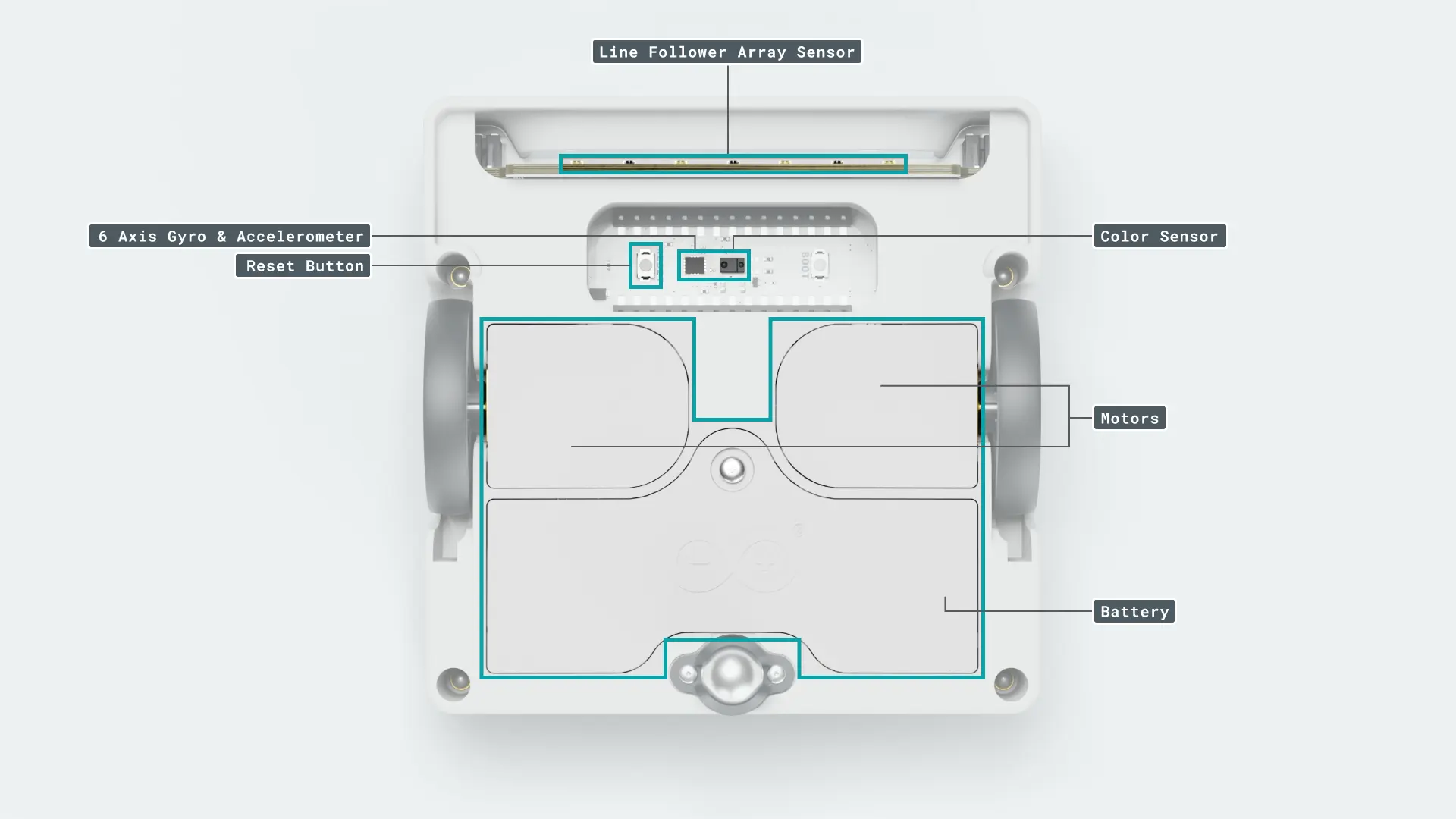
- La batería es una 18650, es la mejor, con la protección de no ser accesible, pues tiene sus peligros
- Sensores
- 7 Botones de contacto AT42QT2120
- 3 Sensores sigue líneas
- Acelerómetro
- Giroscopio de 6 ejes LSM6DSOX
- Sensor de color RGB APDS 9660
- Sensor de distancia TOF 8x8 arrray hasta 350cm VL53L7CX
- Actuadores
- 2 Leds RGB
- 2 motores
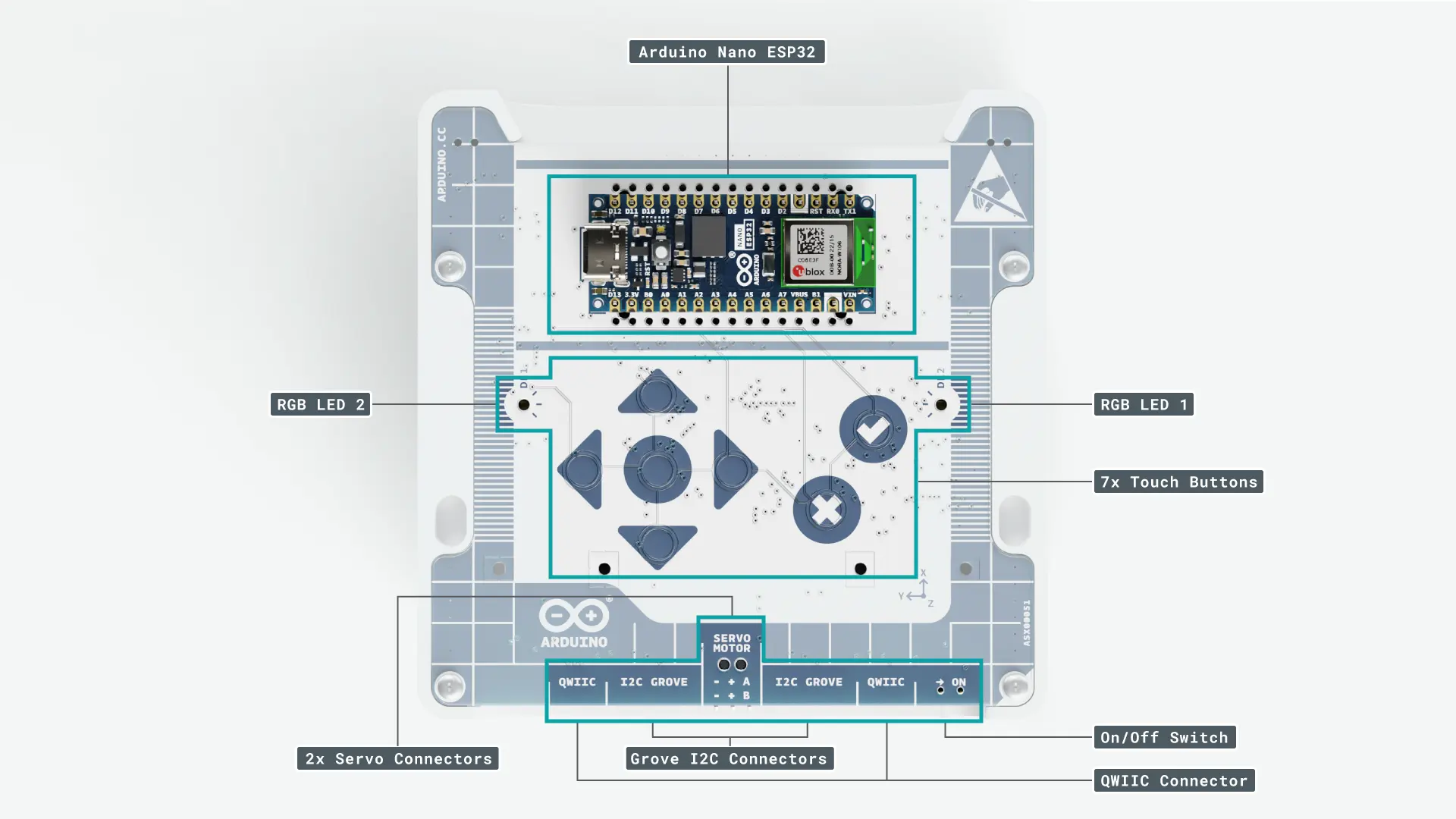
AMPLIACIONES
Dispone de las siguientes conexiones
- Conexiones de ampliación
- 2 conectores para servos
- 2 Conexión I2C
- 2 conexiones Grove

En este curso lo utilizaremos para unir un servo
Además tiene uniones compatibles con piezas de construcción LEGO

Licencia CC-BY-NC-SA origen https://courses.arduino.cc/explore-robotics-micropython/lessons/getting-started/
PROGRAMAS PREDEFINIDOS
Al arrancar ALVIK con el firmware que veremos en Python y mBlock da la posibilidad de ejecutar 3 programas predefinidos :
Licencia CC-BY-NC-SA origen https://courses.arduino.cc/explore-robotics-micropython/lessons/getting-started/
- Programa rojo: Tocando los botones, se mueve 10 cm delante atrás, giro...
- Programa verde: Sigue la mano
- Programa azul: Seguidor de líneas
CURIOSIDADES
A diferencia del típico sensor a distancia SR-04 que funciona por ultrasonidos, el VL53L7CX es mucho más complejo, va por luz (no realiza imágenes, sino por difracción de la luz por lo tanto respeta la privacidad) y nos proporciona muchas más información, la API que veremos nos da 5 distancias en distintas direcciones.
Pensamiento computacional
¿Dónde se sitúa el Arduino Alvik dentro de la oferta de robótica? Como puedes ver en esta presentación, se sitúa dentro de los robots que se programan con código por lo tanto para un perfil de secundaria pero también en bloques con mBlock igual que el mBot, luego también tiene un perfil de primaria de tercer ciclo.
Guía orientativa
Tenemos un grupo Telegram Robótica Educativa en Aragón, https://t.me/roboticaeducativaaragon

Software
La programación con Arduino Alvik puede ser de dos opciones
- con bloques utilizando mBlock
- con código (Python o Arduino IDE)
Guía de los lenguajes de programación para robots
Tenemos un grupo Telegram Robótica Educativa en Aragón, https://t.me/roboticaeducativaaragon