MicroPython con IoT
- ¿Qué es Internet de las cosas IoT?
- Conectar a Wifi
- Crear bot en Telegram
- Encontrar tu ID en Telegram
- Mensajes a Telegram
- Pin pong Telegram
- Recepción mensajes Telegram
¿Qué es Internet de las cosas IoT?
El Internet de las cosas (Internet of Thing IoT) describe objetos físicos —o grupos de estos— con sensores, capacidad de procesamiento, software y otras tecnologías que se conectan e intercambian datos con otros dispositivos y sistemas a través de internet u otras redes de comunicación. El Internet de las cosas se ha considerado un término erróneo porque los dispositivos no necesitan estar conectados a la Internet pública. Sólo necesitan estar conectadas a una red y ser direccionables individualmente
Fuente Wikipedia IoT Internet de las cosas CC-BY-SA

De Drawed by Wilgengebroed on FlickrTranslated by Prades97 CC BY-SA 3.0
Estamos hablando de dispositivos que se conectan a internet de forma desatendida, por vía hardware (o mejor dicho firmware) a diferencia de un ordenador, tablet o móvil, donde tienes que configurar por software el dispositivo y hay un diálogo entre usuario y dispositivo sobre el uso de Internet (el software solicita tal página web, tales datos etc por voluntad del usuario o por diálogo con el usuario) Aquí los dispositivos están ya configurados de los datos que se comunican. Es decir "conectar y olvidar".
Piensa en la diferencia entre un enchufe inteligente y un ordenador, el primero es lo que se considera dentro de IoT
Desventajas: El acceso a Internet de dispositivos caseros puede generar problemas a nivel mundial:
- el caso Mirai
- aspiradores que nos espían
IoT en los cursos de Aularagón
- Blynk: lo que nos gusta de esta herramienta es que es casi "instantánea" o "síncrona". Esto es imprescindible con ciertos robots como el Rover Marciano con Arduino. Necesitamos que "gire" para evitar un obstáculo, no podemos esperar !!!. Veremos con BLYNK un protocolo que entre el dispositivo electrónico (nuestro robot) y nosotros (en ordenador, en una APP en el móvil) la comunicación es instantánea, gracias a un servidor que hará de intermedio, que puede ser local (BLYNK LEGACY) o en Internet (BLYNK IoT).
- Blynk legacy es la que se va a trabajar en
- Blynk IoT es la que se va a trabajar con
- ThinkSpeak y SmartioSpace
- MQTT El emisor envía datos, se almacenan en un servidor, y cuando puede, lo vuelca al cliente. Cliente y emisor pueden ser el dispositivo electrónico y nosotros o viceversa. Veremos que esto es lo que hace el protocolo MQTT y está tremendamente extendido por lo barato y fácil que es. Hace que los servidores no estén tan ocupados, por lo tanto hay varios proveedores que ofrecen este servicio gratuitamente. Hay robots como los que tienen la placa TDR STEAM IMAGINA que envía datos de temperatura, humedad, .. y pueden recibir datos pero no precisan de esta exigencia instantánea como un rover.
- TELEGRAM
- Arduino cloud IoT
- Cyberpi y mBot2
Conectar a Wifi
Para ello necesitamos importar la librería network, crear un objeto network que se conecta a la wifi :
import network
import urequests
WIFI_NETWORK='NOMBREREDWIFI' ## tu red wifi
WIFI_PASSWORD='CONTRASENA' ## la contraseña de la red wifi
wlan = network.WLAN(network.STA_IF)
wlan.active(True)
wlan.connect(WIFI_NETWORK, WIFI_PASSWORD)
print("\nconectando.....")
if wlan.isconnected():
print("Alvik se conectó a",WIFI_NETWORK)
else :
print ("Alvik NO se conectó a",WIFI_NETWORK)
Tiene que salir este mensaje:
>>>
raw REPL; CTRL-B to exit
>OK
conectando.....
Alvik se conectó a NOMBREREDWIFI
>
Crear bot en Telegram

Entramos en nuestro Telegram y chateamos con el creador de los bots: @BotFather y nos saldrá esta pantalla:
Si tecleamos /start nos sale las diferentes opciones
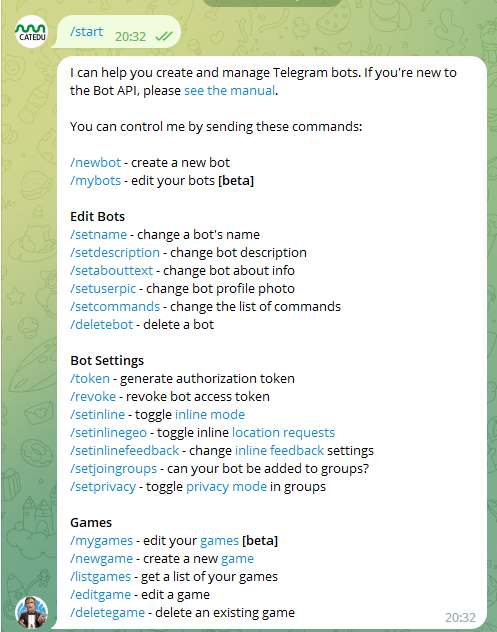
Para crear un nuevo bot, tecleamos /newbot y nos preguntará el nombre del bot
Por cierto, el nombre tiene que acabar con las letras bot,
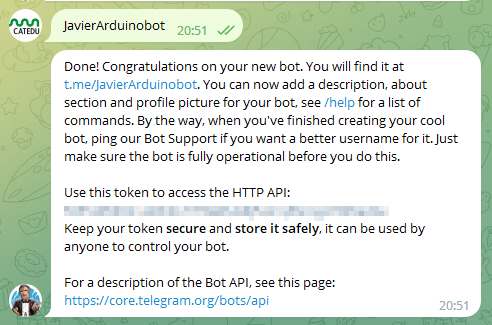
NOS PROPORCIONARÁ EL TOKEN DEL ROBOT, QUE TOMAREMOS NOTA
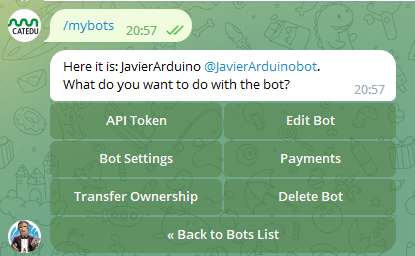
Si tecleamos /mybots nos sale los diferentes bots creados y al pulsar en uno de ellos nos salen sus opciones
Encontrar tu ID en Telegram
Buscar tu ID : chat privado
En este caso para que mi Bot me envié mensajes a mi usuario de Telegram directamente busco mi ID.
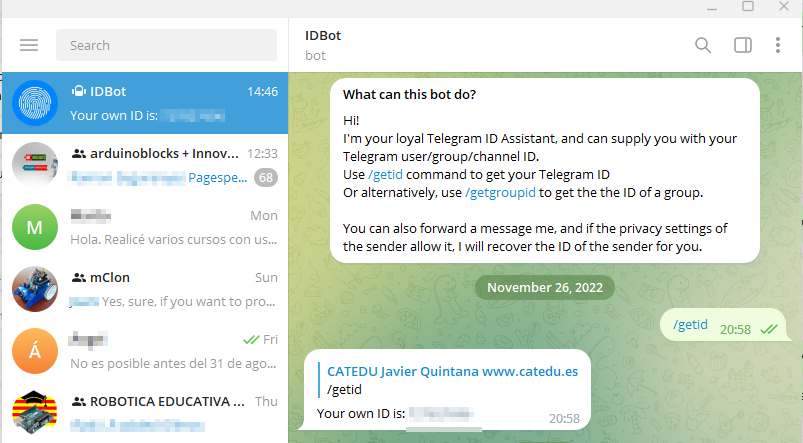
Vamos a chatear con @myidbot
y le preguntamos por nuestro identificador con /getid
TOMAMOS NOTA DE NUESTRO IDENTIFICADOR ID
Buscar ID de un grupo
En este caso tendríamos que añadir a @myidbot al grupo y ejecutar el comando en el chat del grupo /getgroupid saldrá un identificador negativo
Una vez conseguido el ID podemos eliminar @myidbot del grupo
Mensajes a Telegram
Una vez que tengamos el TOKEN y el ID lo ponemos en las líneas
telegramBot="MI_TOKEN" ## el Token que sale de @BotFather
telegramChatId="MI_ID" ## El ID del usuario de Telegram destinatario lo da @myidbot
y entones si ejecutamos la URL
https://api.telegram.org/botMI_TOKEN/sendMessage?chat_id=MI_ID&text=MENSAJE_QUE_QUIERA_ENVIAR
Entonces aparece en mi Telegram desde mi bot el mensaje
Con la librería urequest nos permite con la instrucción urequiest.get(url) nos permite ejecutar la llamada url
El siguiente programa envía por Telegram el botón que estemos pulsando en el Arduino Alvik :
from arduino_alvik import ArduinoAlvik
from time import sleep
import random
import sys
import network
import urequests
import time
alvik = ArduinoAlvik()
alvik.begin()
def enviarmensaje(mensaje):
url="https://api.telegram.org/bot"+telegramBot+"/sendMessage?chat_id="+telegramChatId+"&text="+mensaje
respuesta = urequests.get(url)
#print (type(respuesta))
WIFI_NETWORK='' ## tu red wifi
WIFI_PASSWORD='' ## la contraseña de la red wifi
telegramBot="" ## el Token que sale de @BotFather
telegramChatId="" ## El ID del usuario de Telegram destinatario lo da @myidbot
wlan = network.WLAN(network.STA_IF)
wlan.active(True)
wlan.connect(WIFI_NETWORK, WIFI_PASSWORD)
if wlan.isconnected():
print("Alvik se conectó a",WIFI_NETWORK)
else :
print ("Alvik NO se conectó a",WIFI_NETWORK)
while True:
if alvik.get_touch_any():
alvik.left_led.set_color(1, 0, 0)
alvik.right_led.set_color(1, 0, 0)
else:
alvik.left_led.set_color(0, 1, 0)
alvik.right_led.set_color(0, 1, 0)
if alvik.get_touch_up() :
enviarmensaje("arriba")
if alvik.get_touch_down():
enviarmensaje("abajo")
if alvik.get_touch_left() :
enviarmensaje("izquierda")
if alvik.get_touch_right() :
enviarmensaje("derecha")
time.sleep(1)
Resultado
Para saber más...
- Si en vez de hacerlo con Micropython lo quieres hacer con ArduinoIDE te recomiendo esta página
- Un ejemplo de como el Alvik va a la plaza del parking y cuando lo consigue envía un mensaje a Telegram
Pin pong Telegram
Como paso previo a enviar y recibir mensajes, vamos a realizar los pasos de este vídeo
https://www.youtube.com/watch?v=eZkb9omr-sA
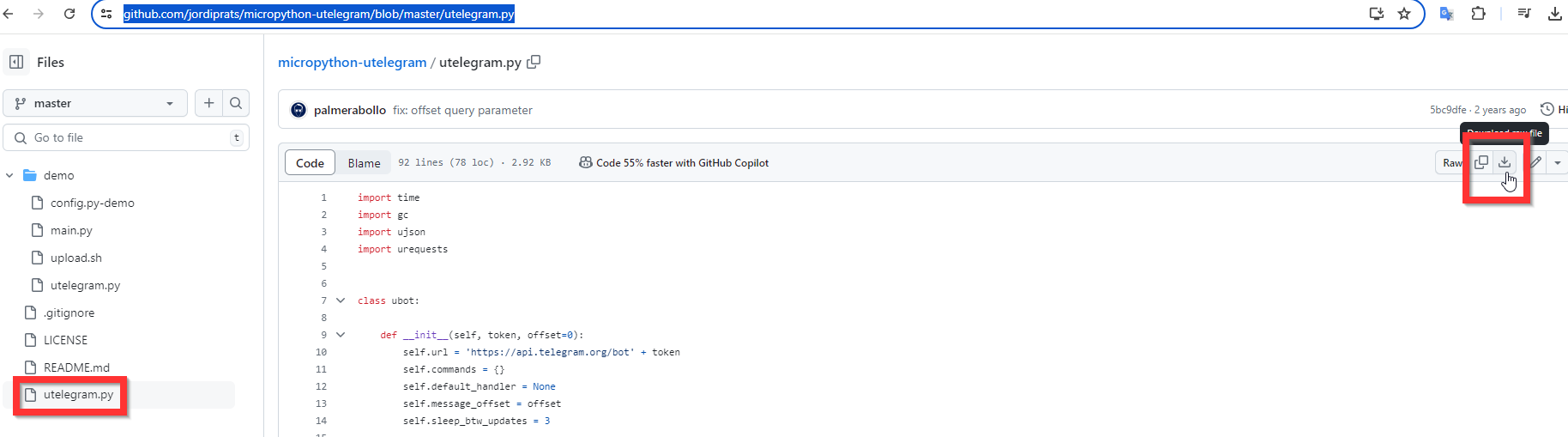
Paso 1: Librería uTelegram.py
Del repositorio de Jordi Prats
https://github.com/jordiprats/micropython-utelegram/blob/master/utelegram.py
import time
import gc
import ujson
import urequests
class ubot:
def __init__(self, token, offset=0):
self.url = 'https://api.telegram.org/bot' + token
self.commands = {}
self.default_handler = None
self.message_offset = offset
self.sleep_btw_updates = 3
messages = self.read_messages()
if messages:
if self.message_offset==0:
self.message_offset = messages[-1]['update_id']
else:
for message in messages:
if message['update_id'] >= self.message_offset:
self.message_offset = message['update_id']
break
def send(self, chat_id, text):
data = {'chat_id': chat_id, 'text': text}
try:
headers = {'Content-type': 'application/json', 'Accept': 'text/plain'}
response = urequests.post(self.url + '/sendMessage', json=data, headers=headers)
response.close()
return True
except:
return False
def read_messages(self):
result = []
self.query_updates = {
'offset': self.message_offset + 1,
'limit': 1,
'timeout': 30,
'allowed_updates': ['message']}
try:
update_messages = urequests.post(self.url + '/getUpdates', json=self.query_updates).json()
if 'result' in update_messages:
for item in update_messages['result']:
result.append(item)
return result
except (ValueError):
return None
except (OSError):
print("OSError: request timed out")
return None
def listen(self):
while True:
self.read_once()
time.sleep(self.sleep_btw_updates)
gc.collect()
def read_once(self):
messages = self.read_messages()
if messages:
if self.message_offset==0:
self.message_offset = messages[-1]['update_id']
self.message_handler(messages[-1])
else:
for message in messages:
if message['update_id'] >= self.message_offset:
self.message_offset = message['update_id']
self.message_handler(message)
break
def register(self, command, handler):
self.commands[command] = handler
def set_default_handler(self, handler):
self.default_handler = handler
def set_sleep_btw_updates(self, sleep_time):
self.sleep_btw_updates = sleep_time
def message_handler(self, message):
if 'text' in message['message']:
parts = message['message']['text'].split(' ')
if parts[0] in self.commands:
self.commands[parts[0]](message)
else:
if self.default_handler:
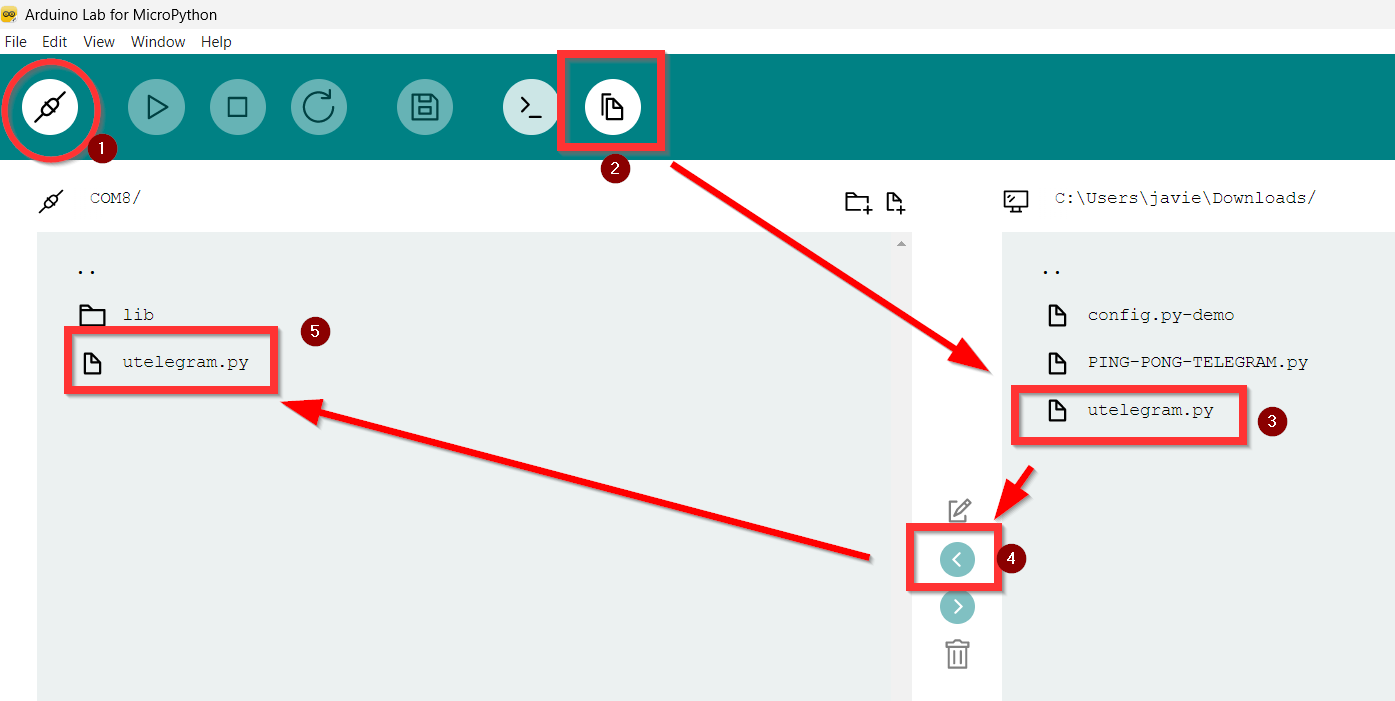
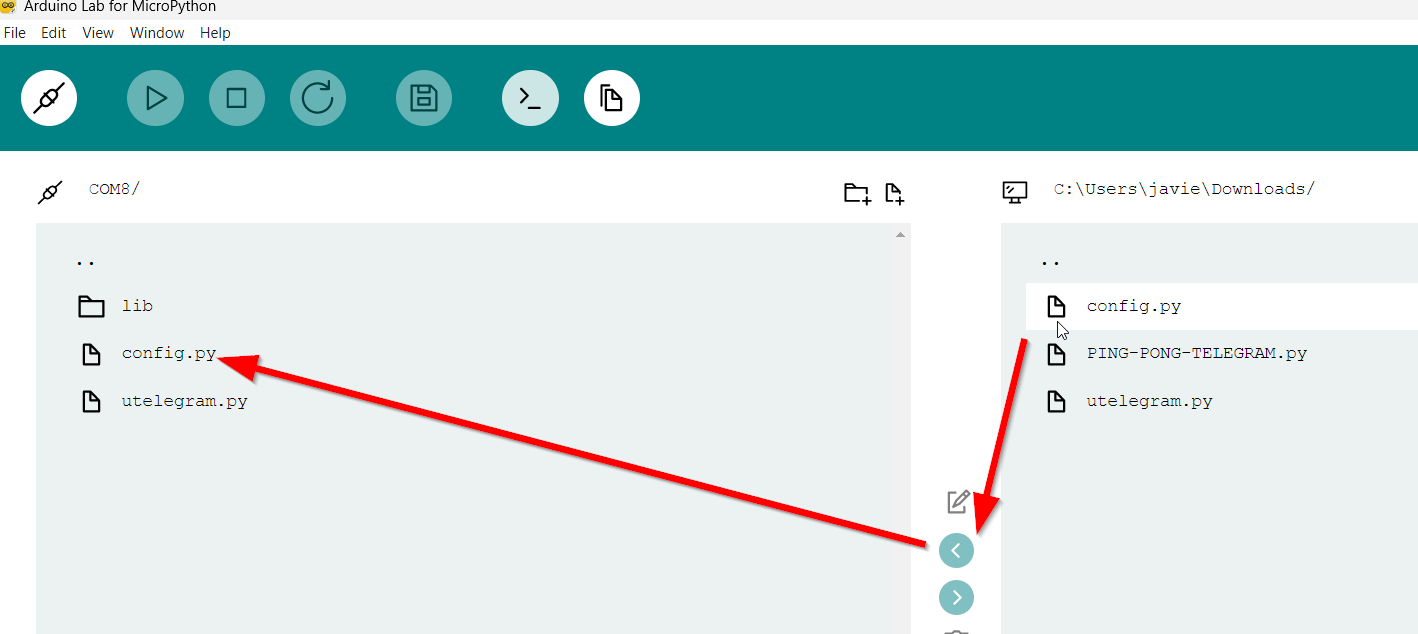
self.default_handler(message)Y la cargamos dentro de nuestro ESP32, ejecutamos Arduino Lab for MicroPython, conectamos, vamos al gestor de archivos y lo llevamos dentro del ESP32 Alvik
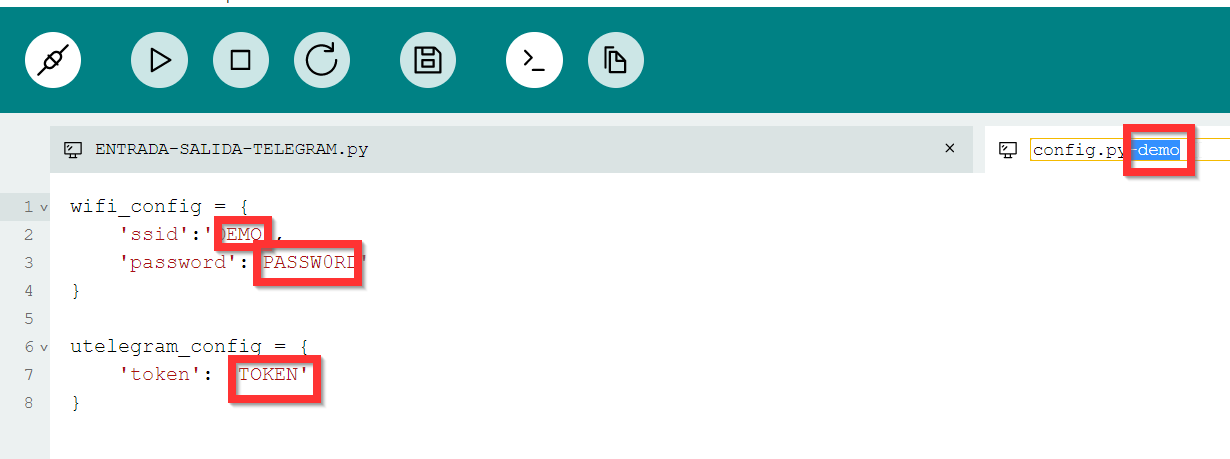
Paso 2 Archivo config.py
El archivo config.py no es más que el archivo que contiene la wifi y el token, se puede descargar de https://github.com/jordiprats/micropython-utelegram/blob/master/demo/config.py-demo o también se puede copiar y pegar de aquí mismo
wifi_config = {
'ssid':'DEMO',
'password':'PASSW0RD'
}
utelegram_config = {
'token': 'TOKEN'
}Ponemos los valores de nuestra wifi SSID, PASSWORD y TOKEN y borramos del nombre el -demo y lo dejamos como config.py
y como antes, lo pasamos al ESP32 Alvik
Se podría poner esa información en el código del programa principal main.py tal y como el programa de la página https://libros.catedu.es/books/arduino-alvik/page/mensajes-a-telegram
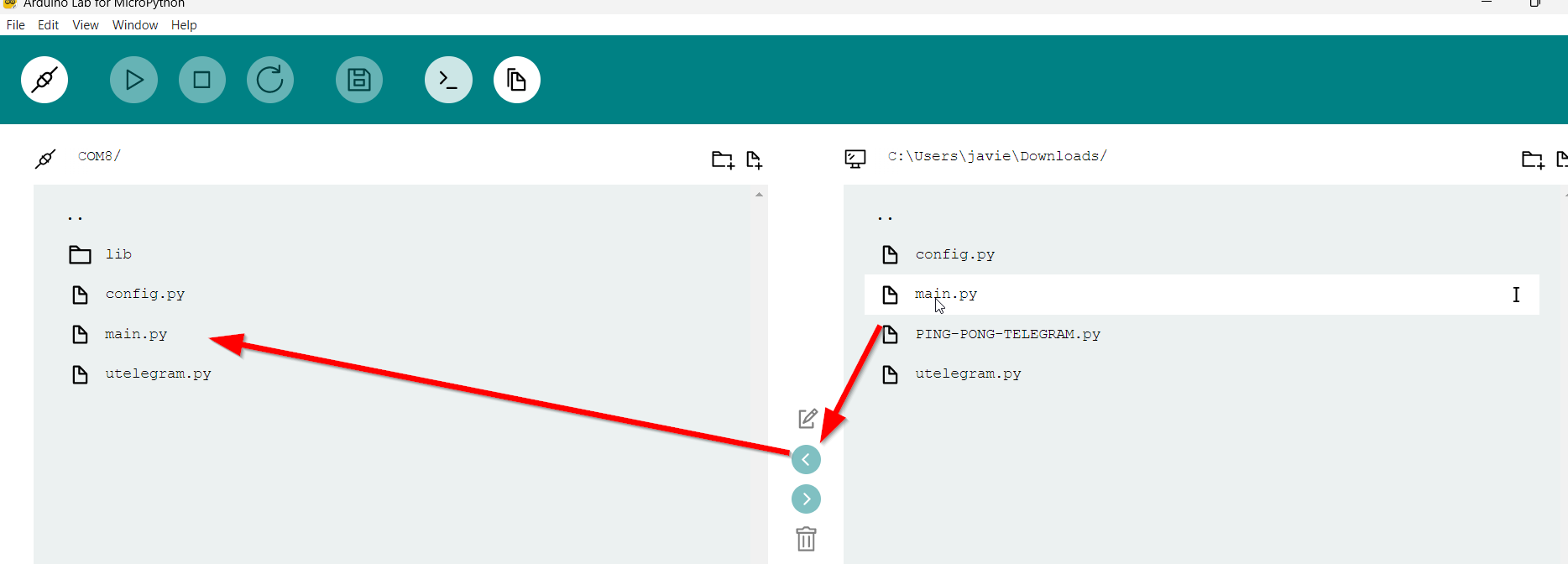
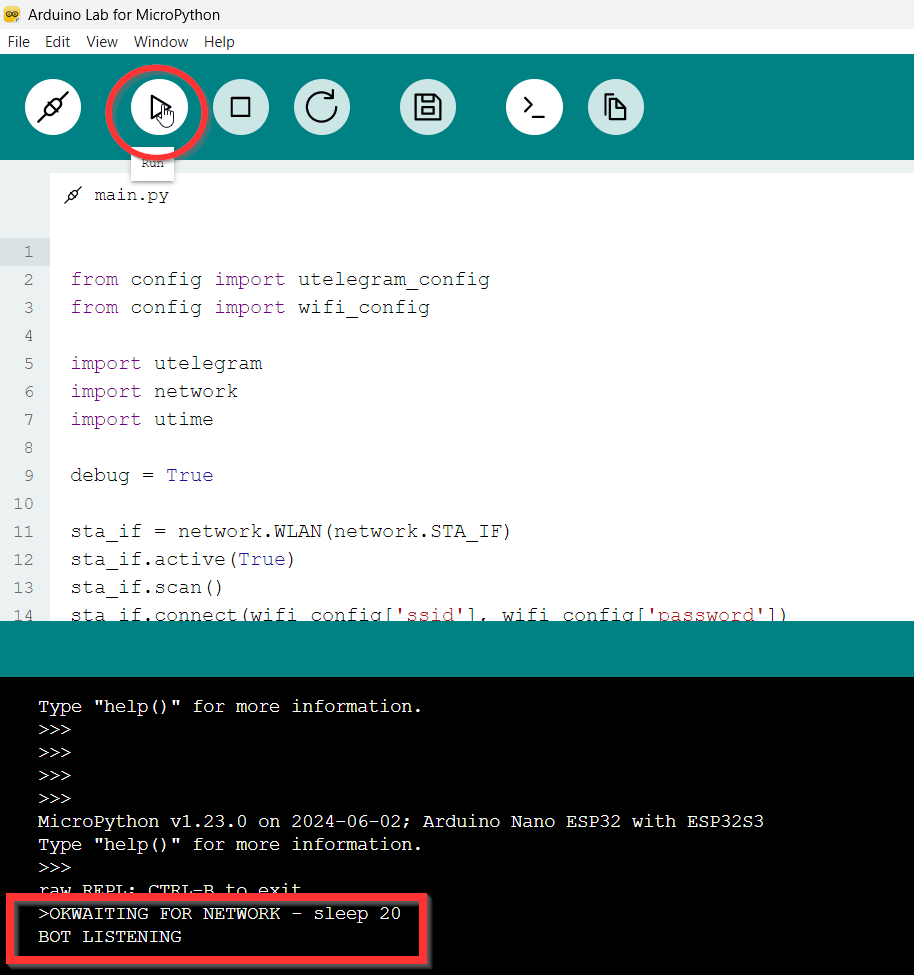
Paso 3 Programa principal main.py
El programa lo podemos descargar de https://github.com/jordiprats/micropython-utelegram/blob/master/demo/main.py
o de aquí mismo
tal cual, no hay que poner nuestro ssid, ni password ni token pues lo "lee" de config.py
from config import utelegram_config
from config import wifi_config
import utelegram
import network
import utime
debug = True
sta_if = network.WLAN(network.STA_IF)
sta_if.active(True)
sta_if.scan()
sta_if.connect(wifi_config['ssid'], wifi_config['password'])
if debug: print('WAITING FOR NETWORK - sleep 20')
utime.sleep(20)
def get_message(message):
bot.send(message['message']['chat']['id'], message['message']['text'].upper())
def reply_ping(message):
print(message)
bot.send(message['message']['chat']['id'], 'pong')
if sta_if.isconnected():
bot = utelegram.ubot(utelegram_config['token'])
bot.register('/ping', reply_ping)
bot.set_default_handler(get_message)
print('BOT LISTENING')
bot.listen()
else:
print('NOT CONNECTED - aborting')🤔No sé por qué hay que esperar 20 segundos en utime.sleep(20) 🤷♂️sospecho que necesita tiempo para estar preparado para "escuchar"
Y lo llevamos al ESP32
Ejecución
Pulsamos el main.py del ESP32 (no hace falta encender Alvik pues todas las instrucciones son sólo del ESP32), ESPERAR 20 SEGUNDOS hasta que aparezca BOT LISTENING
Nos vamos a Telegram al usuario del bot que hemos creado, le tecleamos /ping y contesta el ESP32 pong

Recepción mensajes Telegram
Podemos ahora enviar un mensaje a ArduinoAlvik y que ejecute un programa por ejemplo el evita obstáculos:
- Envía un mensaje por Telegram que está preparado
- Si le enviamos /go el contesta voy
- Ejecuta la rutina de evita obstáculos
from arduino_alvik import ArduinoAlvik #### IMPORTAMOS LAS FUNCIONES DE ALVIK
from config import utelegram_config
from config import wifi_config
##### AÑADIMOS LIBRERÍAS PARA LOS OBSTÁCULOS
from time import sleep_ms
import sys
import utelegram
import network
import utime
################ añadimos urequest para enviar mensajes con url
import urequests
alvik = ArduinoAlvik() #### CREAMOS UN OBJETO ALVIK
alvik.begin() #### LO INICIALIZAMOS
################# VARIABLES PARA EVITAR OBSTÁCULOS
distance = 10
degrees = 45.00
speed = 50.00
############################################################
debug = True
sta_if = network.WLAN(network.STA_IF)
sta_if.active(True)
sta_if.scan()
sta_if.connect(wifi_config['ssid'], wifi_config['password'])
if debug: print('WAITING FOR NETWORK - sleep 20')
utime.sleep(20)
########################################################################################
def get_message(message):
bot.send(message['message']['chat']['id'], message['message']['text'].upper())
############################################################################################
def enviarmensaje(mensaje): ###FUNCION ENVIAR MENSAJE CON URL ojo cambiar PONAQUITUID
url="https://api.telegram.org/bot"+utelegram_config['token']+"/sendMessage?chat_id=PONAQUITUID&text="+mensaje
respuesta = urequests.get(url)
###########################################################################################
def reply_ping(message):
print(message)
bot.send(message['message']['chat']['id'], 'voy') ### CAMBIAMOS EL MENSAJE
evitamosobstaculos() ### y EVITAMOS OBSTÁCULOS
############################################################################################
def evitamosobstaculos(): ### FUNCIÓN EVITAR OBSTÁCULOS
while (True):
distance_l, distance_cl, distance_c, distance_r, distance_cr = alvik.get_distance()
sleep_ms(50)
print(distance_c)
if distance_c < distance:
alvik.rotate(degrees, 'deg')
elif distance_cl < distance:
alvik.rotate(degrees, 'deg')
elif distance_cr < distance:
alvik.rotate(degrees, 'deg')
elif distance_l < distance:
alvik.rotate(degrees, 'deg')
elif distance_r < distance:
alvik.rotate(degrees, 'deg')
else:
alvik.drive(speed, 0.0, linear_unit='cm/s')
############################################################################################
if sta_if.isconnected():
bot = utelegram.ubot(utelegram_config['token'])
bot.register('/go', reply_ping) ### LA CONSIGNA SERÁ GO
bot.set_default_handler(get_message)
print('BOT LISTENING')
enviarmensaje("preparado")
bot.listen()
else:
print('NOT CONNECTED - aborting')