MicroPython sin IoT
- GPIO del ESP32
- Parpadeo LED ESP32
- Parpadeo leds Alvik
- Danza
- Control con la mano
- Sigue líneas
- Evita obstáculos
- Programas de test
- Robótica para infantil
- Manejando servos
- Más ejemplos
- I2C
GPIO del ESP32
Mapa de los pines en el Arduino Nano ESP32
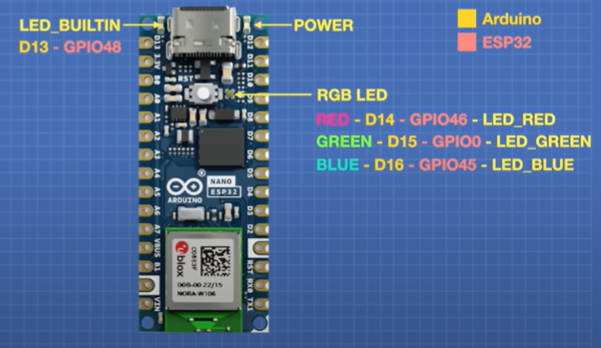
Extraído de Youtube Exploring the Arduino Nano ESP32
Como podemos observar, nuestro objetivo pues es el GPIO0
¿Dónde está físicamente los GPIO ?
Pues como podemos ver en este esquema el GPIO0 está en el pin BOOT1

Fuente CC-BY-SA https://docs.arduino.cc/tutorials/alvik/user-manual/
-
SI USAMOS MICROPYTHON TENEMOS QUE USAR LAS VERDES
-
SI USAMOS CÓDIGO ARDUINO IDE TENEMOS QUE USAR LAS ROJAS
Como puedes observar, si cortocircuitas B1 = GPI0 = D15 con GND enciende el led RGB en color verdel esto pasa si Pones la placa en modo Bootloader.
Parpadeo LED ESP32
Objetivo
Vamos a hacer que parpadee el RGB integrado que tiene el ESP32 concretamente el color verde.
Programa
#extraido de https://youtu.be/R51tf66es9w?t=1540
from machine import Pin
import time
myLED = Pin(0,Pin.OUT)
while True:
myLED.value(0)
time.sleep(0.5)
myLED.value(1)
time.sleep(0.5)Aclaraciones
- Al hacer from machine import Pin estamos importanto las definiciones input output de los pines del ESP32 nano arduino
- Ya hemos visto que lo que nos interesa el el 0 y lo ponemos como OUT
¿Y si queremos que parpadee el RGB en color ROJO qué cambiamos?
Easy peasy, cambiamos myLED = Pin (0, Pin.OUT) por myLED = Pin (46, Pin.OUT)
Que como puedes ver coincide también con un pin de poner en modo Bootloader: el BOOT0
Curiosidad: Por eso si se resetea Arduino Alvik (al encender, o al hacer dos clicks en el botón) se encienden y se apagan varias veces el led RGB en colores rojo y verde, pues se están activando los BOOTs
¿Y si queremos que parpadee el led color VERDE que hay al lado del USB (LED BUILTIN) ? ¿Qué cambiamos?
Easy peasy, cambiamos myLED = Pin (0, Pin.OUT) por myLED = Pin (48, Pin.OUT)
Resultado:
Parpadeo leds Alvik
El programa
from arduino_alvik import ArduinoAlvik
from time import sleep
import sys
alvik = ArduinoAlvik()
alvik.begin()
sleep(5)
while True:
alvik.left_led.set_color(1, 0, 0)
alvik.right_led.set_color(1, 0, 0)
sleep(1)
alvik.left_led.set_color(0, 0, 0)
alvik.right_led.set_color(0, 0, 0)
sleep(1)Origen: CC-BY-SA https://courses.arduino.cc/explore-robotics-micropython/lessons/getting-started/
Resultado
Danza
Programa
from arduino_alvik import ArduinoAlvik
from time import sleep
import sys
alvik = ArduinoAlvik()
alvik.begin()
sleep(5)
while True:
#Drive forward
alvik.set_wheels_speed(10,10)
sleep(2)
#Turn left
alvik.set_wheels_speed(0,20)
sleep(2)
#Turn right
alvik.set_wheels_speed(20,0)
sleep(2)
#Drive backwards
alvik.set_wheels_speed(-10,-10)
sleep(2)De CC-BY-SA https://courses.arduino.cc/explore-robotics-micropython/lessons/getting-started/
Vídeo
Más caña
La instrucción alvik.set_wheels_speed(0,20) significa que da 0 rpm a la rueda izquierda y 20rpm a la derecha, donde rpm significa revoluciones por minuto ¿y si multiplicamos todos los rpm por 10?
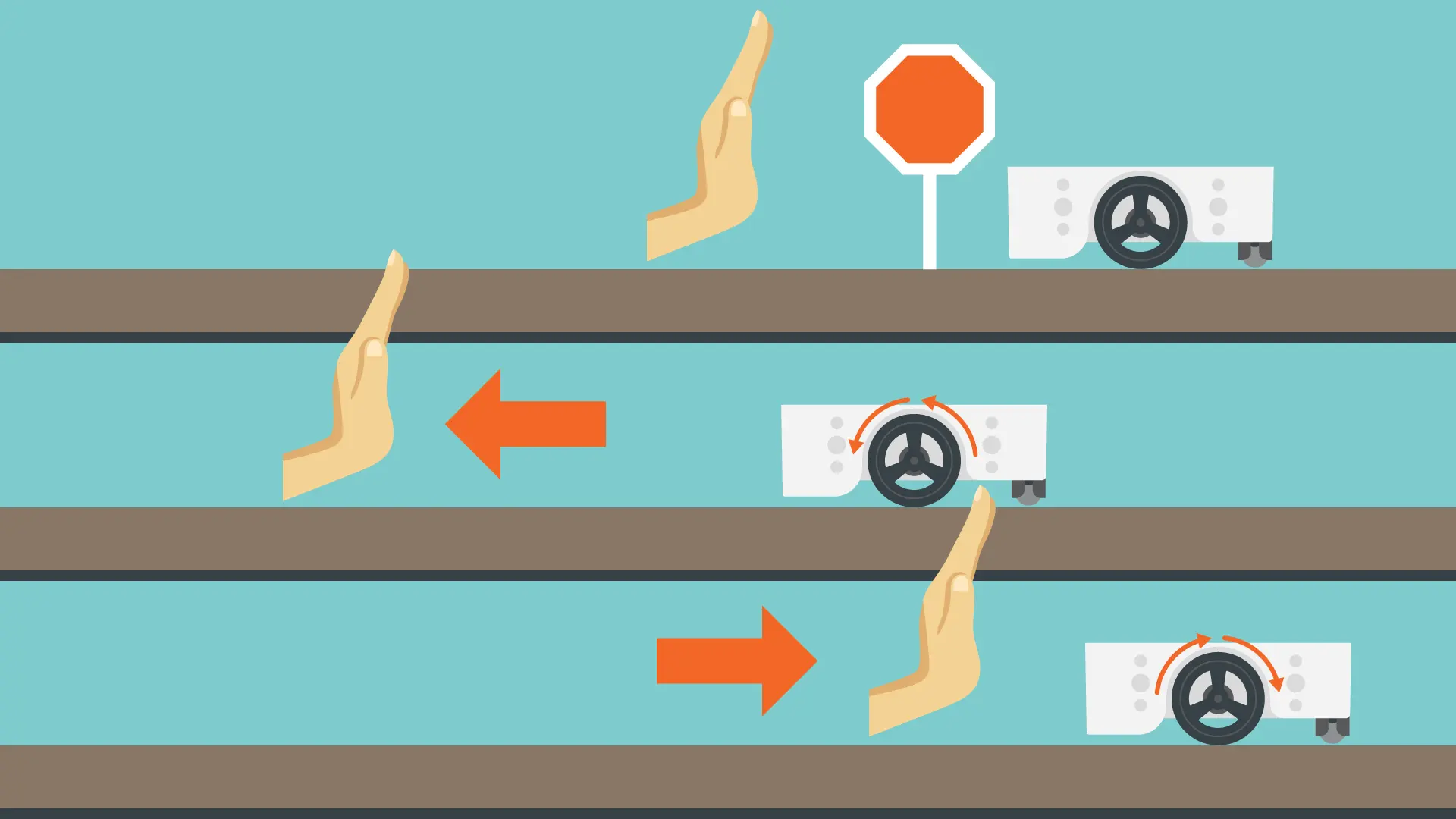
Control con la mano
Aquí trataremos de hacer que ALVIK responda a la posición de nuestra mano a través de el sensor ultrasonidos que tiene en frente suyo. Tendrá que intentar permanecer en una distancia intermedia con lo que tiene enfrente suyo.
ESTE PROGRAMA ESTA POR DEFECTO (marcado con el led verde) cuando instalas el firmware). Ver https://libros.catedu.es/books/arduino-alvik/page/que-es-arduino-alvik
 Fuente https://docs.arduino.cc/tutorials/alvik/getting-started/ AuthorJose Garcia CC-BY-SA
Fuente https://docs.arduino.cc/tutorials/alvik/getting-started/ AuthorJose Garcia CC-BY-SA
from arduino_alvik import ArduinoAlvik
from time import sleep
import sys
alvik = ArduinoAlvik()
alvik.begin()
sleep(5)
#ESTABLECER VELOCIDAD
speed = 30
#IMPRIMIR VALORES Y ESTABLECER VARIABLES
while True:
try:
center = alvik.get_distance_top()
print(center)
sleep(0.01)
#Si la mano esta cerca, Alvik se va hacia atras
if center <= 12:
alvik.set_wheels_speed(-speed, -speed)
#Si la mano esta lejos, Alvik se acerca
elif center <= 30 and center >= 18:
alvik.set_wheels_speed(speed, speed)
#Si la mano esta en una distancia de 12-18, Alvik se queda quieto
else:
alvik.set_wheels_speed(0, 0)
#INTERRUPCIÓN DEL USUARIO
except KeyboardInterrupt as e:
print('over')
alvik.stop()
sys.exit()Sigue líneas
Vamos a crear un programa SIGUE LÍNEAS. El objetivo es que el robot ALVIK sea capaz de seguir cualquier trazado de líneas utilizando sus sensores IR
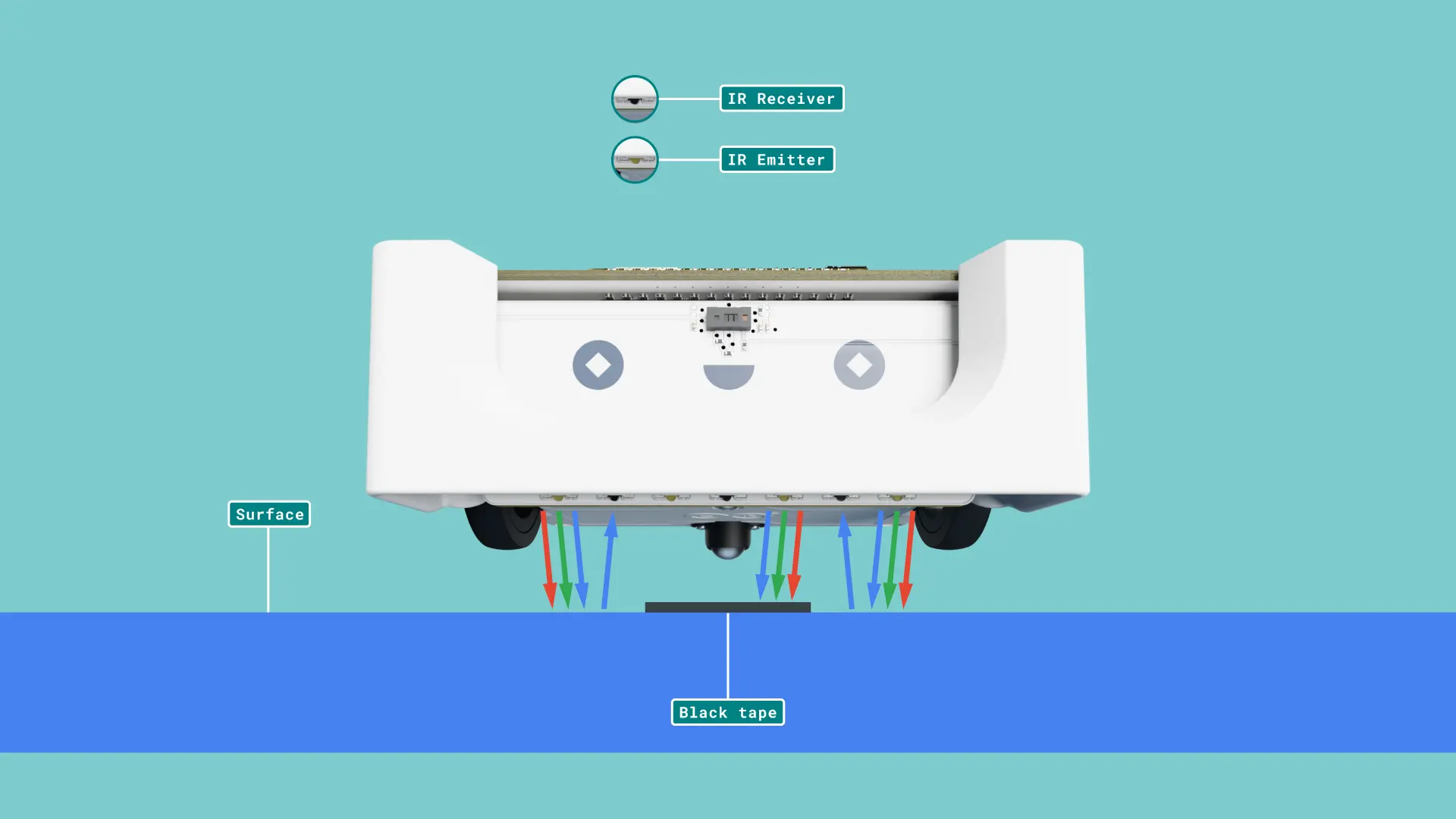 Fuente https://docs.arduino.cc/tutorials/alvik/getting-started/ AuthorJose Gracia CC-BY-SA
Fuente https://docs.arduino.cc/tutorials/alvik/getting-started/ AuthorJose Gracia CC-BY-SA
Para poder conseguirlo simplemente tendremos que establecer distintas condiciones de que hacer dependiendo de que sensor del robot detecta el trazado negro.
En este programa también hemos hecho que el robot nos trasmita los valores de los distintos sensores y que el usuario pueda interrumpir el proceso (todo suponiendo que el robot está conectado al equipo).
from arduino_alvik import ArduinoAlvik
from time import sleep
import sys
alvik = ArduinoAlvik()
alvik.begin()
sleep(5)
#VELOCIDAD DEL ROBOT
base_speed = 30
#IMPRIMIR VALORES DE LOS SENSORES
while True:
try:
ir_left, ir_center, ir_right = alvik.get_line_sensors()
print(ir_left, ir_center, ir_right)
sleep(0.01)
#Condiciones de giro, avance y parar
if ir_center > 300:
alvik.set_wheels_speed(base_speed, base_speed)
elif ir_left > 300:
alvik.set_wheels_speed(0, base_speed)
elif ir_right > 300:
alvik.set_wheels_speed(base_speed, 0)
else:
alvik.set_wheels_speed(0, 0)
#INTERRUPCION DEL USUARIO
except KeyboardInterrupt as e:
print('over')
alvik.stop()
sys.exit()No va muy preciso, el código es mejorable:
- Si la raya es fina, no avanza
- Si la raya no es negra no avanza
- La velocidad 30 es baja
- El margen límite 300 es demasiado generoso que hace que pueda quedarse quieto por detectar todo blanco (ver el final del vídeo)
Más preciso (agradecimientos a Mario Monteagudo Alda CP Ejea)
from arduino import *
from arduino_alvik import ArduinoAlvik
alvik = ArduinoAlvik()
def setup():
alvik.begin()
delay(1000)
def loop():
global base, iteracion
iz, ce, de = alvik.get_line_sensors()
error = ((1*iz+2*ce+3*de)/(iz+ce+de))-2
if ((ce > 400) and (de > 400)):
alvik.left_led.set_color(1, 1, 0)
alvik.right_led.set_color(1, 1, 0)
base = 0
ajuste = 30
iteracion = 25
elif ((ce > 400) and (iz > 400)):
alvik.left_led.set_color(1, 1, 0)
alvik.right_led.set_color(1, 1, 0)
base = 0
ajuste = -30
iteracion = 25
elif (abs(error) < 0.75) and (iteracion == 0):
alvik.left_led.set_color(0, 0, 1)
alvik.right_led.set_color(0, 0, 1)
base = 60
ajuste = 25 * error + 40 * error * abs(error) + 80 * error * error * error
elif (abs(error) < 0.75):
alvik.left_led.set_color(0, 1, 0)
alvik.right_led.set_color(0, 1, 0)
base = 40
ajuste = 20 * error + 40 * error * abs(error) + 80 * error * error * error
iteracion = iteracion -1
elif error > 0:
alvik.left_led.set_color(1, 0, 0)
alvik.right_led.set_color(1, 0, 0)
base = 0
ajuste = 60
iteracion = 25
else:
alvik.left_led.set_color(1, 0, 0)
alvik.right_led.set_color(1, 0, 0)
base = 0
ajuste = -60
iteracion = 25
veIz = base + ajuste
veDe = base - ajuste
alvik.set_wheels_speed(veIz,veDe)
delay(50)
def cleanup():
alvik.stop()
base = 40
iteracion = 0
start(setup, loop, cleanup)Autor Mario Monteagudo Alda CP Ejea
Evita obstáculos
Programa
El núcleo del programa es la función api
get_distance(unit: str = 'cm')
Es sorprendente el sensor TOF como puede leer no sólo diréctamente sino a los lados :
- left_tof: 45° to the left object distance
- center_left_tof: 22° to the left object distance
- center_tof: center object distance
- center_right_tof: 22° to the right object distance
- right_tof: 45° to the right object distance
El programa es extraido de https://docs.arduino.cc/tutorials/alvik/getting-started/ AuthorJose Garcia
from arduino_alvik import ArduinoAlvik
from time import sleep_ms
import sys
alvik = ArduinoAlvik()
alvik.begin()
sleep_ms(5000) # waiting for the robot to setup
distance = 20
degrees = 45.00
speed = 50.00
while (True):
distance_l, distance_cl, distance_c, distance_r, distance_cr = alvik.get_distance()
sleep_ms(50)
print(distance_c)
if distance_c < distance:
alvik.rotate(degrees, 'deg')
elif distance_cl < distance:
alvik.rotate(degrees, 'deg')
elif distance_cr < distance:
alvik.rotate(degrees, 'deg')
elif distance_l < distance:
alvik.rotate(degrees, 'deg')
elif distance_r < distance:
alvik.rotate(degrees, 'deg')
else:
alvik.drive(speed, 0.0, linear_unit='cm/s')
Resultado
El código es mejorable, pues que rote 45 grados tantas veces puede hacer que se quede "enganchado" en una esquina, ver el final del vídeo:
Programas de test
En el repositorio https://github.com/arduino/arduino-alvik-mpy/tree/main/examples podemos encontrar ejemplos para ver el uso de los diferentes sensores y actuadores, por ejemplo
| Sensor name | Part name | Test program name |
|---|---|---|
| RGB Color detection | APDS 9660 | read_color_sensor.py |
| ToF 8x8 Array - up to 350 cm | LSM6DSOX | read_tof.py |
| IMU - 6 degree | VL53L7CX | read_imu.py |
| 3x Line follower | custom made | line_follower.py |
| 7x Touch sensor | AT42QT2120 | read_touch.py |
| Actuator name | Part name | Test program name |
| Geared motors w/ encoder | GM12-N20VA-08255-150-EN | wheels_positions.py |
| RGB LEDs | RGB LEDs | leds_settings.py |
Detector de color
Modificación del read_color_sensor.py
from arduino_alvik import ArduinoAlvik
from time import sleep_ms
import sys
alvik = ArduinoAlvik()
alvik.begin()
while True:
try:
r, g, b = alvik.get_color()
h, s, v = alvik.get_color('hsv')
print(f'RED: {r}, Green: {g}, Blue: {b}, HUE: {h}, SAT: {s}, VAL: {v}')
print(f'COLOR LABEL:')
print ({alvik.get_color_label()})
sleep_ms(1000)
except KeyboardInterrupt as e:
print('over')
alvik.stop()
sys.exit()Detector TOF
Si ejecutamos read_tof.py
from arduino_alvik import ArduinoAlvik
from time import sleep_ms
import sys
alvik = ArduinoAlvik()
alvik.begin()
while True:
try:
L, CL, C, CR, R = alvik.get_distance()
T = alvik.get_distance_top()
B = alvik.get_distance_bottom()
print(f'T: {T} | B: {B} | L: {L} | CL: {CL} | C: {C} | CR: {CR} | R: {R}')
sleep_ms(100)
except KeyboardInterrupt as e:
print('over')
alvik.stop()
sys.exit()
Detecta hasta los obstáculos por arriba
Giro
Si ejecutamos read_imu.py
from arduino_alvik import ArduinoAlvik
from time import sleep_ms
import sys
alvik = ArduinoAlvik()
alvik.begin()
while True:
try:
ax, ay, az = alvik.get_accelerations()
gx, gy, gz = alvik.get_gyros()
print(f'ax: {ax}, ay: {ay}, az: {az}, gx: {gx}, gy: {gy}, gz: {gz}')
sleep_ms(100)
except KeyboardInterrupt as e:
print('over')
alvik.stop()
sys.exit()Vemos como el eje x cambia de -1 0 a 1 según la posición
Robótica para infantil
Se puede hacer un robot tipo Beebot, Colby, Escornabot.
Si no conocéis estos robots mirar el curso de Aularagon

Podemos cargar el siguiente programa, modificado de https://github.com/arduino/arduino-alvik-mpy/blob/main/examples/touch_move.py
from arduino_alvik import ArduinoAlvik
from time import sleep_ms
import sys
alvik = ArduinoAlvik()
alvik.begin()
alvik.left_led.set_color(1, 0, 0)
alvik.right_led.set_color(1, 0, 0)
distancia = 15
movements = []
def blink():
alvik.left_led.set_color(1, 0, 1)
alvik.right_led.set_color(1, 0, 1)
sleep_ms(200)
alvik.left_led.set_color(1, 0, 0)
alvik.right_led.set_color(1, 0, 0)
def add_movement():
global movements
if alvik.get_touch_up():
movements.append('forward')
blink()
while alvik.get_touch_up():
sleep_ms(100)
if alvik.get_touch_down():
movements.append('backward')
blink()
while alvik.get_touch_down():
sleep_ms(100)
if alvik.get_touch_left():
movements.append('left')
blink()
while alvik.get_touch_left():
sleep_ms(100)
if alvik.get_touch_right():
movements.append('right')
blink()
while alvik.get_touch_right():
sleep_ms(100)
if alvik.get_touch_cancel():
movements = []
for i in range(0, 3):
val = i % 2
alvik.left_led.set_color(val, 0, 0)
alvik.right_led.set_color(val, 0, 0)
sleep_ms(200)
while alvik.get_touch_cancel():
sleep_ms(100)
def run_movement(movement):
if movement == 'forward':
alvik.move(distancia, blocking=False)
if movement == 'backward':
alvik.move(-distancia, blocking=False)
if movement == 'left':
alvik.rotate(90, blocking=False)
if movement == 'right':
alvik.rotate(-90, blocking=False)
while not alvik.get_touch_cancel() and not alvik.is_target_reached():
alvik.left_led.set_color(1, 0, 0)
alvik.right_led.set_color(1, 0, 0)
sleep_ms(100)
alvik.left_led.set_color(0, 0, 0)
alvik.right_led.set_color(0, 0, 0)
sleep_ms(100)
while alvik.get_touch_ok():
sleep_ms(50)
while not (alvik.get_touch_ok() and len(movements) != 0):
add_movement()
sleep_ms(50)
try:
while True:
alvik.left_led.set_color(0, 0, 0)
alvik.right_led.set_color(0, 0, 0)
for move in movements:
run_movement(move)
if alvik.get_touch_cancel():
break
movements = []
while not (alvik.get_touch_ok() and len(movements) != 0):
alvik.left_led.set_color(1, 0, 0)
alvik.right_led.set_color(1, 0, 0)
alvik.brake()
add_movement()
sleep_ms(100)
except KeyboardInterrupt as e:
print('over')
alvik.stop()
sys.exit()El resultado es que perfectamente se puede usar como robótica en infantil
Los robots Beebot, Colby, Escornabot. utilizan la distancia de 15cm de desplazamiento, justo lo mismo que los palos depresores de lengua, luego fácilmente uno puede hacer un circuito :
Manejando servos
Conexión
Se pueden conectar hasta dos servos, el A es el de arriba y el B es el de abajo
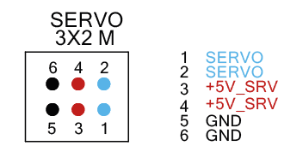
La api set_servo_positions
Nos permite controlar estos dos servos indicando el primer argumento el ángulo (0-180) del A y en el segundo el del B set_servo_positions(a_position: int, b_position: int)
Programa
Extraído de https://docs.arduino.cc/tutorials/alvik/user-manual/#add-servo-motors
from arduino_alvik import ArduinoAlvik
import time
alvik = ArduinoAlvik()
alvik.begin()
while True:
alvik.set_servo_positions(0,0)
time.sleep(2)
alvik.set_servo_positions(90,180)
time.sleep(2)
alvik.set_servo_positions(180,90)
time.sleep(2)
alvik.set_servo_positions(90,0)
time.sleep(2)Resultado
Más ejemplos
Los puedes encontrar en https://courses.arduino.cc/explore-robotics-micropython/
I2C
El protocolo I2C se desarrolló originalmente en 1982 para receptores de TV, y su característica principal son dos líneas (aparte de la alimentación 3.3V-5V y masa):
- SDA que son datos bidireccionales
- SCL que es la señal de reloj
Un dispositivo hace de Master y proporciona la señal de reloj. (Puede haber extraordinariamente más de un master) y los otros dispositivos, (en plural, con los mismos cables, aquí esta la ventaja) hacen de Slave y cada uno tiene asociado una dirección.
Ejemplos de I2C con Arduino:
- Conexión con pantalla LCD https://libros.catedu.es/books/programa-arduino-mediante-codigo/page/lcd
- Comunicación entre dos Arduinos https://dronebotworkshop.com/i2c-arduino-arduino/
En Arduino Alvik, los pines SDA y SCL están conectados en los pines 11 y 12 y de ahí salen por los conectores QWIIC y Grove :
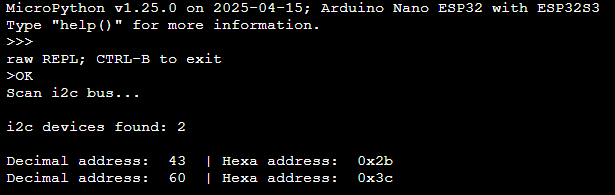
Podemos escanear los dispositivos I2C que están conectados y averiguar la dirección que tienen asociada :
from machine import I2C
from machine import Pin
i2c = I2C(0, scl=Pin(12, Pin.OUT), sda=Pin(11, Pin.OUT))
print()
print('Scan i2c bus...')
print()
devices = i2c.scan()
if len(devices) == 0:
print("No i2c device !")
else:
print('i2c devices found:',len(devices))
print()
for device in devices:
print("Decimal address: ",device," | Hexa address: ",hex(device))
print()Fuente : https://docs.arduino.cc/tutorials/alvik/user-manual/#grove-connectors
He conectado un OLED en el conector Grove

Y me ha salido que tenía dos dispositivos, el primero es interno del Alvik, que tiene dirección 43 y el segundo es el OLED conectado con la dirección 60 en decimal o 0x3c en hexadecimal que es la dirección por defecto en el OLED ssd1306:
Si ejecutamos el siguiente script, vemos que necesita importar la librería ssd1306 (se puede ver en su repositorio, que es compatible con el display ssd1306 128x64 I2C y con ESP32 de Arduino).. Esta librería tiene las funciones necesarias para visualizar lo que uno quiera en el OLED. Funciones de esta librería
from machine import I2C
from machine import Pin
import ssd1306
i2c = I2C(0, scl=Pin(12, Pin.OUT), sda=Pin(11, Pin.OUT))
# dirección por defecto 0x3c
oled = ssd1306.SSD1306_I2C(128, 64, i2c)
while True:
oled.text('HOLA CATEDU !', 10, 10)
oled.show()
Y el resultado es :

Si quieres por ejemplo esto :
mira este código