Actualizar el firmware significa que nuestro Alvik le instalamos el interpretador de micropython y por lo tanto podremos: - Programar en código con **Python** - Programar en bloques con **mBlock**
Si ya tiene el firmware instalado en el Alvik **puedes saltarte esta página**
Con este firmware **no** podemos programar con Arduino IDE
##### **Antes de nada enciende el Alvik con esta precaución :**Primero **nos aseguramos que el Alvik este APAGADO antes de conectarlo con el PC en caso contrario se puede perjudicar la batería**[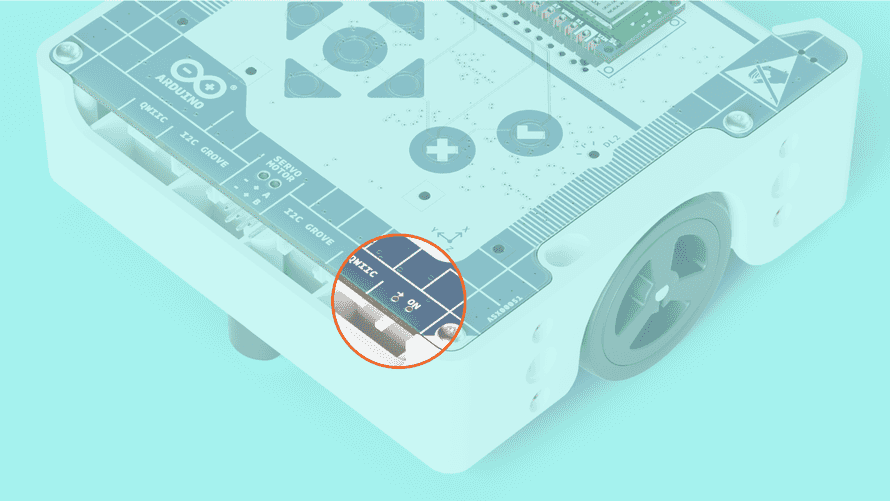](https://libros.catedu.es/uploads/images/gallery/2025-03/robot-off.png) Licencia CC-BY-NC-SA origen [https://courses.arduino.cc/explore-robotics-micropython/lessons/getting-started/](https://courses.arduino.cc/explore-robotics-micropython/lessons/getting-started/) Luego lo **conectamos** por cable[](https://libros.catedu.es/uploads/images/gallery/2024-06/connecting-final.gif) Licencia CC-BY-NC-SA origen [https://courses.arduino.cc/explore-robotics-micropython/lessons/getting-started/](https://courses.arduino.cc/explore-robotics-micropython/lessons/getting-started/) Y ahora ya podemos **encender** nuestro Alvik [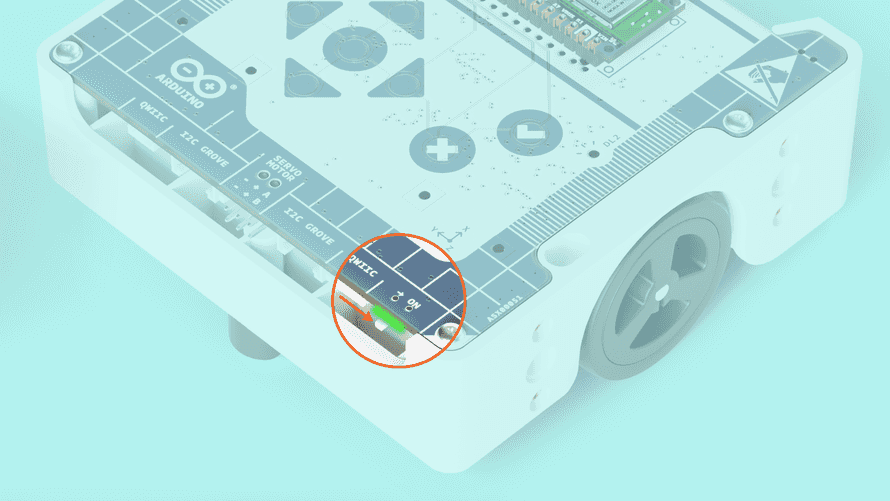](https://libros.catedu.es/uploads/images/gallery/2025-03/alvik-on.png) Licencia CC-BY-NC-SA origen [https://courses.arduino.cc/explore-robotics-micropython/lessons/getting-started/](https://courses.arduino.cc/explore-robotics-micropython/lessons/getting-started/)
##### **Actualizamos el FIRMWARE** Esto lo hacemos una vez, entramos en [https://alvikupdate.arduino.cc/](https://alvikupdate.arduino.cc/) damos a **conectar** y luego **updated** *(si no sabes qué puerto es, desconecta y conecta y te fijas cual aparece)*Puede tardar varios ciclos, **paciencia**
**[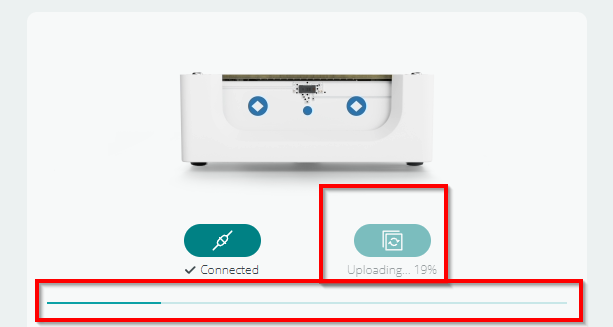](https://libros.catedu.es/uploads/images/gallery/2025-03/2025-03-28-10-18-52-arduino-alvik-updater.png)**Asegúrate de tener el ALVIK **encendido**
Hasta que sale esta pantalla de éxito [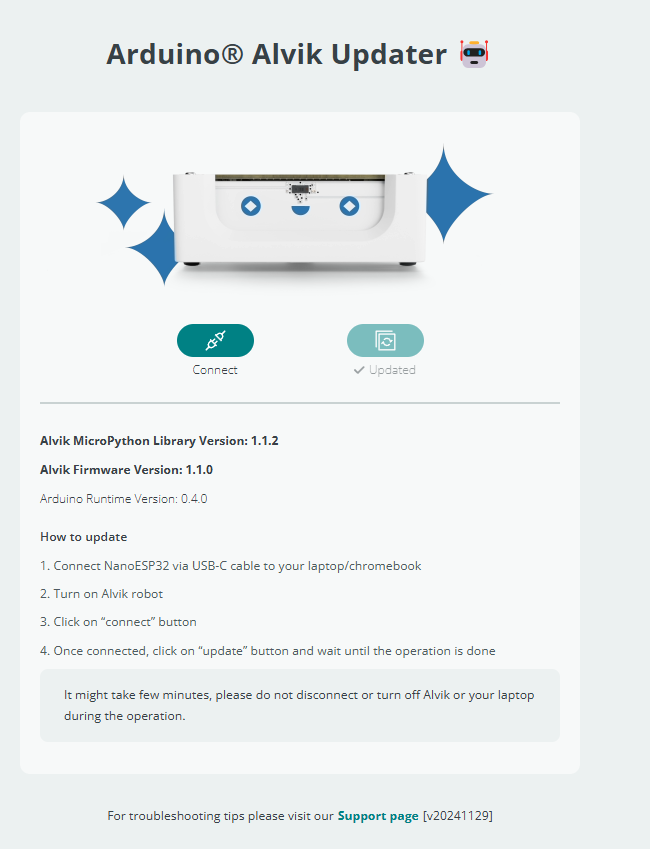](https://libros.catedu.es/uploads/images/gallery/2025-03/2025-03-26-11-59-36-arduino-alvik-updater.png) ## **ATENCIÓN ¿Y SI DA PROBLEMAS?** Por ejemplo se ha quedado enganchado, lo has desconectado antes de hora... entonces la solución pasa por utilizar un flasheador más potente ##### **MicroPython Installer** [Descargamos el programa ](https://labs.arduino.cc/en/labs/micropython-installer)y ejecutamos teniendo conectado el ESP32 del Alvik, (no hace falta encender el robot, pues sólo trabajamos con el ESP32) lo detecta y simplemente le damos a Instalar Micropython dentro del chip Descargable en [https://labs.arduino.cc/en/labs/micropython-installer](https://labs.arduino.cc/en/labs/micropython-installer) [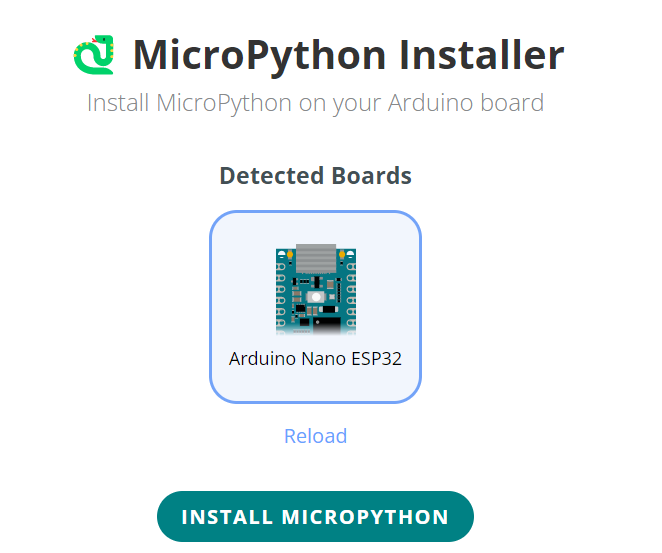](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-04-19-17-33-micropython-installer.png)Si sigue puñetero y no detecta el Arduino Nano ESP32 tendrás que ponerlo en modo Bootoloader, haz los pasos 1, 2 y 3 de [https://libros.catedu.es/books/arduino-alvik/page/preparar-alvik-para-arduino-ide-modo-bootloader ](https://libros.catedu.es/books/arduino-alvik/page/preparar-alvik-para-arduino-ide-modo-bootloader) y vuelve a intentarlo con el MicroPython Installer
Al acabar de instalar, sale este mensaje : [](https://libros.catedu.es/uploads/images/gallery/2025-03/2025-03-28-10-15-55-micropython-installer.png) Aconsejamos **apagar y desconectar totalmente** y volver a conectar (acuérdate que no hay que conectar el ALVIK en el PC con el ALVIK encendido, lo conectas con el PC apagado y luego lo enciendes, tal y como dice arriba del todo) Entramos en [https://alvikupdate.arduino.cc/](https://alvikupdate.arduino.cc/) damos a **conectar** y luego **updated** *(si no sabes qué puerto es, desconecta y conecta y te fijas cual aparece)*AQUÍ VA A TARDAR VARIOS, VARIOS CICLOS, **paciencia, paciencia**
**[](https://libros.catedu.es/uploads/images/gallery/2025-03/2025-03-28-10-18-52-arduino-alvik-updater.png)**Asegúrate de tener el ALVIK **encendido**
Hasta que sale esta pantalla de éxito [](https://libros.catedu.es/uploads/images/gallery/2025-03/2025-03-26-11-59-36-arduino-alvik-updater.png) # Instalando mBlock {{@13340}} # Instalando la extensión ALVIK en mBlock ##### **En mBlock instalar la extensión Alvik** 1. Pinchamos en el + de **añadir** dispositivo 2. **buscamos** Alvik 3. apretamos al + de **descargarlo** (al finalizar desaparece el + ) 4. dos clicks y se **instala** [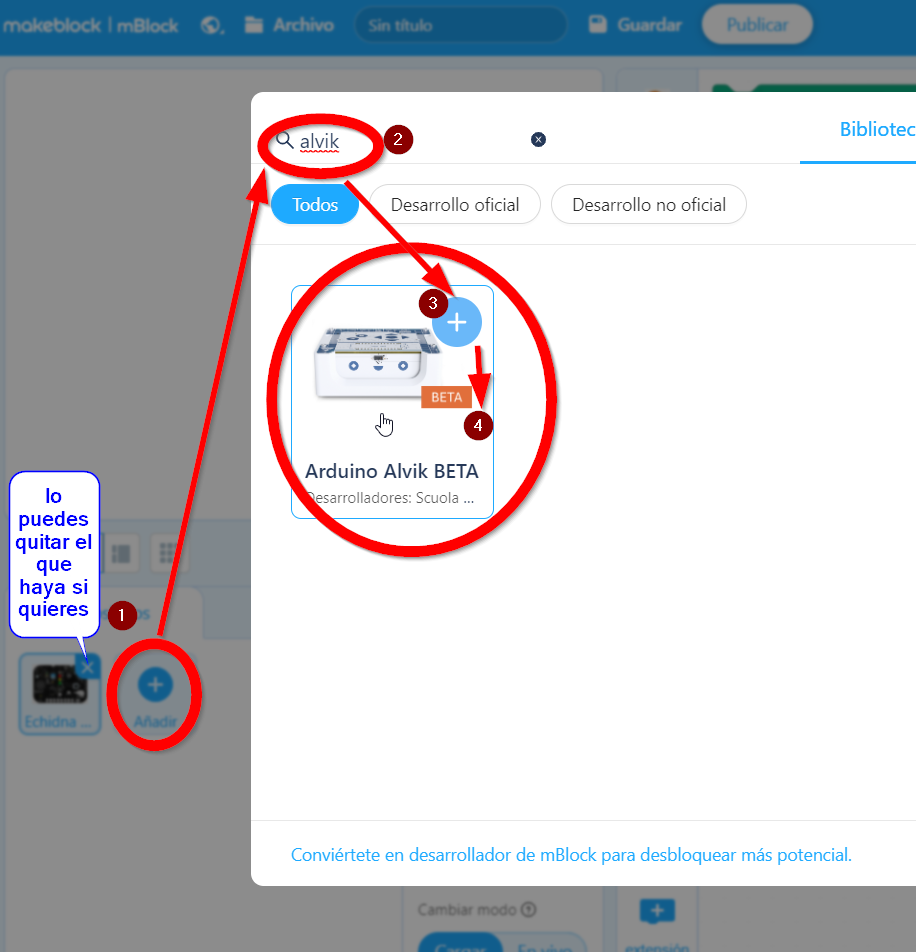](https://libros.catedu.es/uploads/images/gallery/2025-03/2025-03-25-23-34-33-mblock-v5-4-3.png) *Licencia CC-BY-SA [https://docs.arduino.cc/tutorials/alvik/getting-started-mblock/](https://docs.arduino.cc/tutorials/alvik/getting-started-mblock/)*  Se nos instalan una colección de instrucciones para controlar el ALVIK completamente ##### [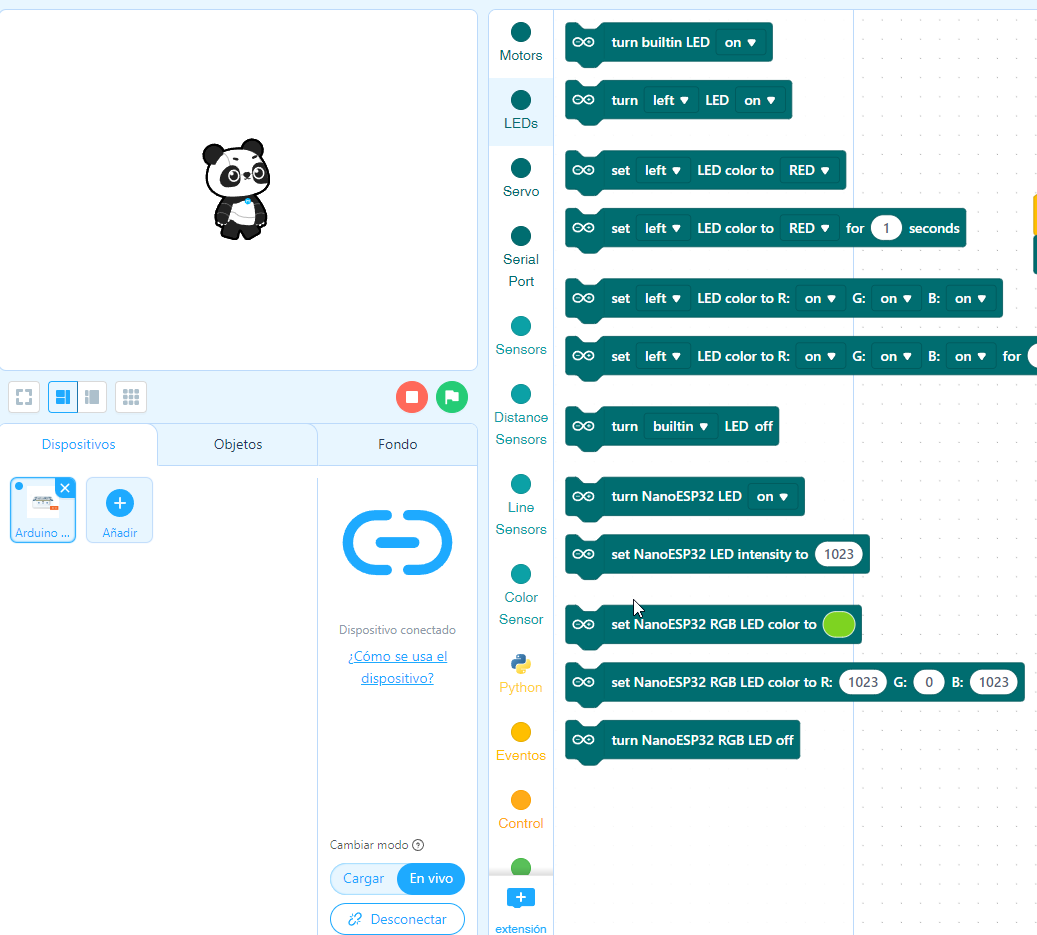](https://libros.catedu.es/uploads/images/gallery/2025-03/2025-03-26-10-39-58-mblock-v5-4-3.png) # Dos formas de programar en mBlock {{@2986}} # Un ejemplo de programa en vivo ##### **PROBANDO EN VIVO** 1. Entramos en mBlok, en dispositivos 2. Seleccionamos Alvik 3. En vivo 4. Conectar 5. Nos saldrá una ventana pop-up en Windows saldrá COMx donde x es un número. En otros sistemas operativos /dev/tty.\[yourSerialPortName\] o algo así. En teoría tiene que funcionar con el puerto elegido, sino, elegiremos otro, suele ser el más alto. [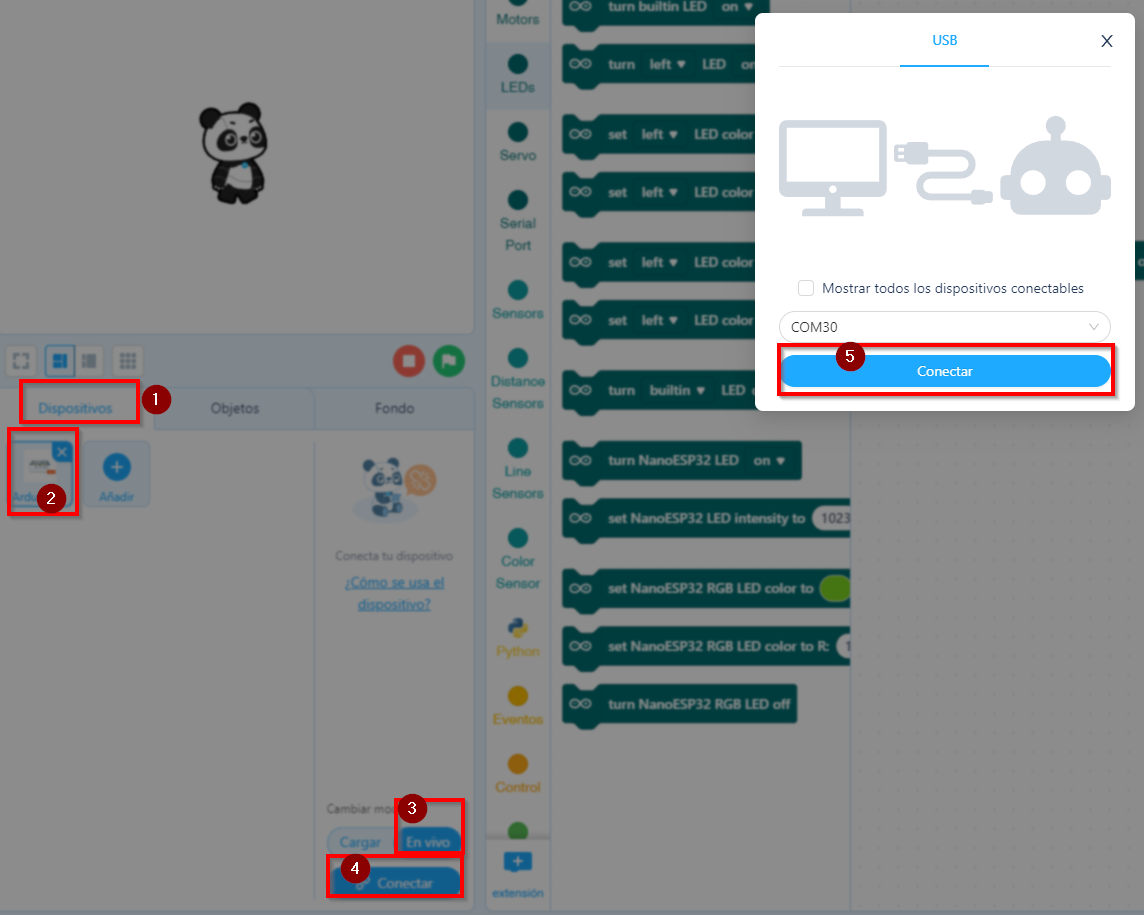](https://libros.catedu.es/uploads/images/gallery/2025-03/2025-03-26-11-03-38-configuracion.png) A funcionar así de sencillo !!!!!la primera vez, tarda algo en responder, paciencia
**RETO** Ves probando así de rápido la multitud de instrucciones gráficas para saber cómo funcionan
# Un ejemplo de programa en carga Como ejemplo de programa en carga 1. Creamos un sencillo programa con eventos de **cuando botón ... es presionado ...** 2. Elegimos el botón **Cargar** 3. **Subir** código [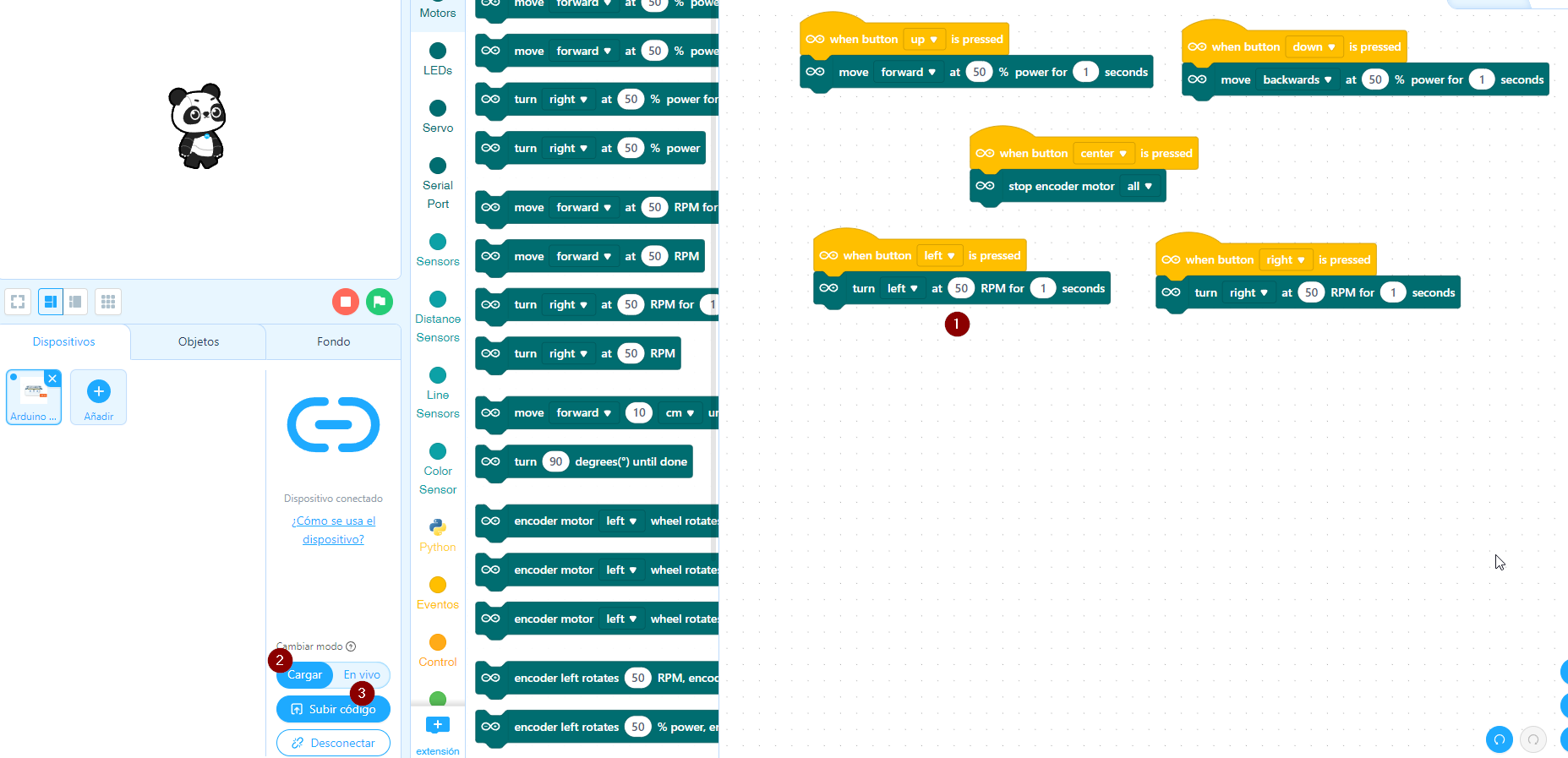](https://libros.catedu.es/uploads/images/gallery/2025-03/2025-03-26-12-38-48-mblock-v5-4-3.png) Ahora el robot **es libre en movimientos** no depende del ordenador, por lo tanto podemos desconectar el cable # Otro ejemplo de programa en carga : Evita obstáculos Podemos hacer un evita obstáculos, en la página *[https://docs.arduino.cc/tutorials/alvik/getting-started-mblock/](https://docs.arduino.cc/tutorials/alvik/getting-started-mblock/)* proponen este programa *Licencia CC-BY-SA fuente [https://docs.arduino.cc/tutorials/alvik/getting-started-mblock/](https://docs.arduino.cc/tutorials/alvik/getting-started-mblock/)* Pero no gira, luego proponemos este [https://planet.mblock.cc/project/5547662](https://planet.mblock.cc/project/5547662) [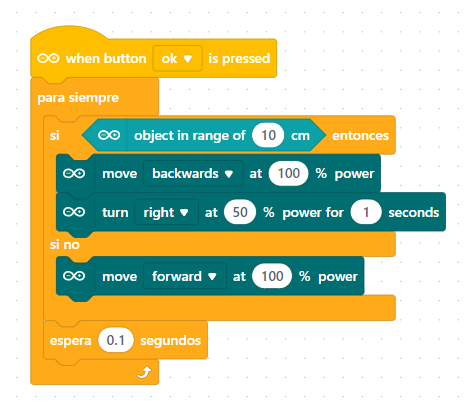](https://libros.catedu.es/uploads/images/gallery/2025-03/2025-03-26-13-13-53-mblock-v5-4-3.png) # Métodos para interactuar los objetos y el robot (dispositivo) {{@13349}} # Un ejemplo interactuando con un objeto Vamos a probar dos métodos anteriores, el de variable global y el envío de mensaje, por lo tanto **vamos a trabajar EN VIVO** El Alvik va a enviar cuando pulse OK un mensaje COMENZAMOS a un objeto (un ovni) para que empiece a moverse y va grabando continuamente en dos variables globales ANGULOX y ANGULOY los ángulos del sensor de inclinación [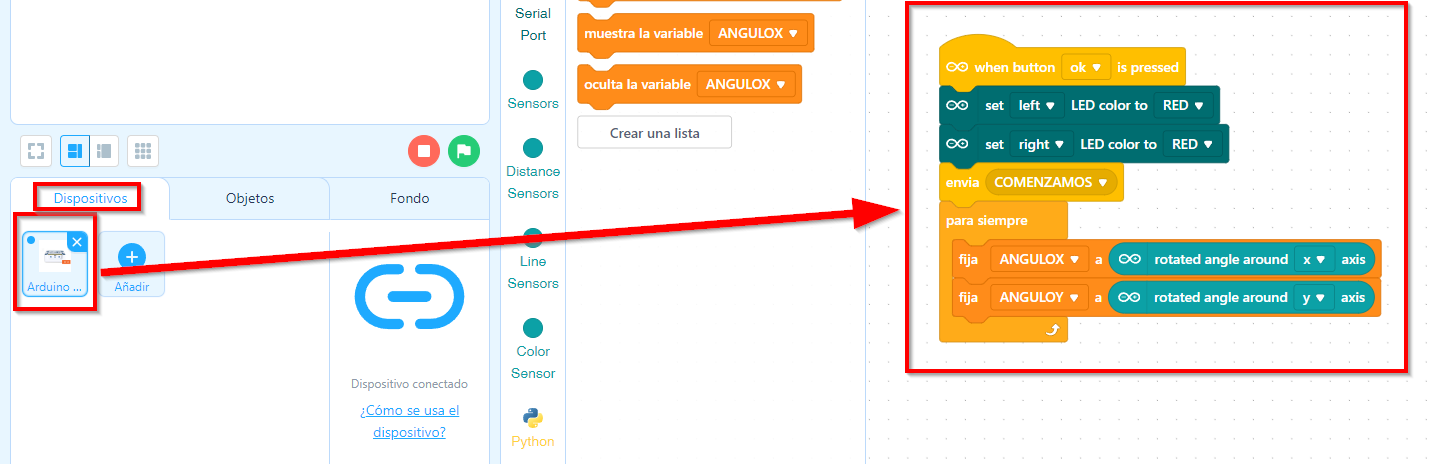](https://libros.catedu.es/uploads/images/gallery/2025-03/2025-03-26-14-10-40-mblock-v5-4-3.png) En un objeto OVNI vamos a realizar un programa que se mueva según el ángulo. Como el ángulo va de 0 a 100 y el eje va de 0-250 luego lo multiplicaremos por dos para que se mueva con más margen. [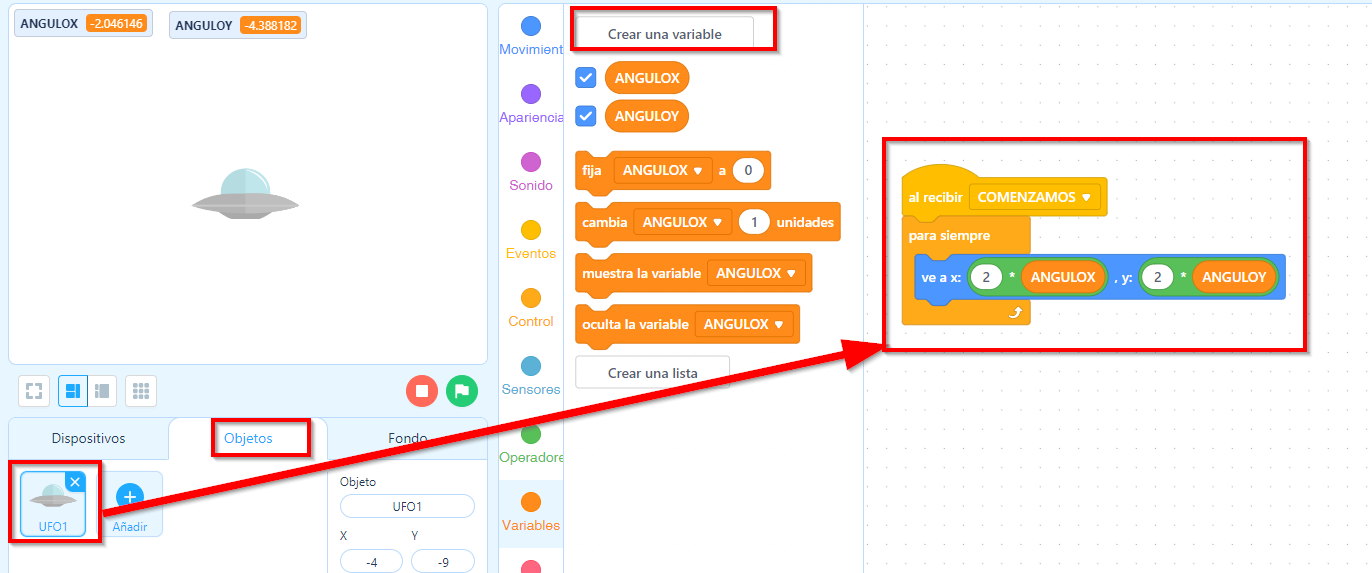](https://libros.catedu.es/uploads/images/gallery/2025-03/2025-03-26-14-12-05-mblock-v5-4-3.png) El programa lo tienes aquí [https://planet.mblock.cc/project/5548364](https://planet.mblock.cc/project/5548364) Y este es el resultado