Programas
- Parpadeo leds
- Danza
- Control con la mano
- Sigue líneas
- Evita obstáculos
- Programas de test
- Robótica para infantil
Parpadeo leds
El programa
from arduino_alvik import ArduinoAlvik
from time import sleep
import sys
alvik = ArduinoAlvik()
alvik.begin()
sleep(5)
while True:
alvik.left_led.set_color(1, 0, 0)
alvik.right_led.set_color(1, 0, 0)
sleep(1)
alvik.left_led.set_color(0, 0, 0)
alvik.right_led.set_color(0, 0, 0)
sleep(1)Origen: https://courses.arduino.cc/explore-robotics-micropython/lessons/getting-started/
Resultado
Danza
Programa
from arduino_alvik import ArduinoAlvik
from time import sleep
import sys
alvik = ArduinoAlvik()
alvik.begin()
sleep(5)
while True:
#Drive forward
alvik.set_wheels_speed(10,10)
sleep(2)
#Turn left
alvik.set_wheels_speed(0,20)
sleep(2)
#Turn right
alvik.set_wheels_speed(20,0)
sleep(2)
#Drive backwards
alvik.set_wheels_speed(-10,-10)
sleep(2)De https://courses.arduino.cc/explore-robotics-micropython/lessons/getting-started/
Vídeo
Más caña
La instrucción alvik.set_wheels_speed(0,20) significa que da 0 rpm a la rueda izquierda y 20rpm a la derecha, donde rpm significa revoluciones por minuto ¿y si multiplicamos todos los rpm por 10?
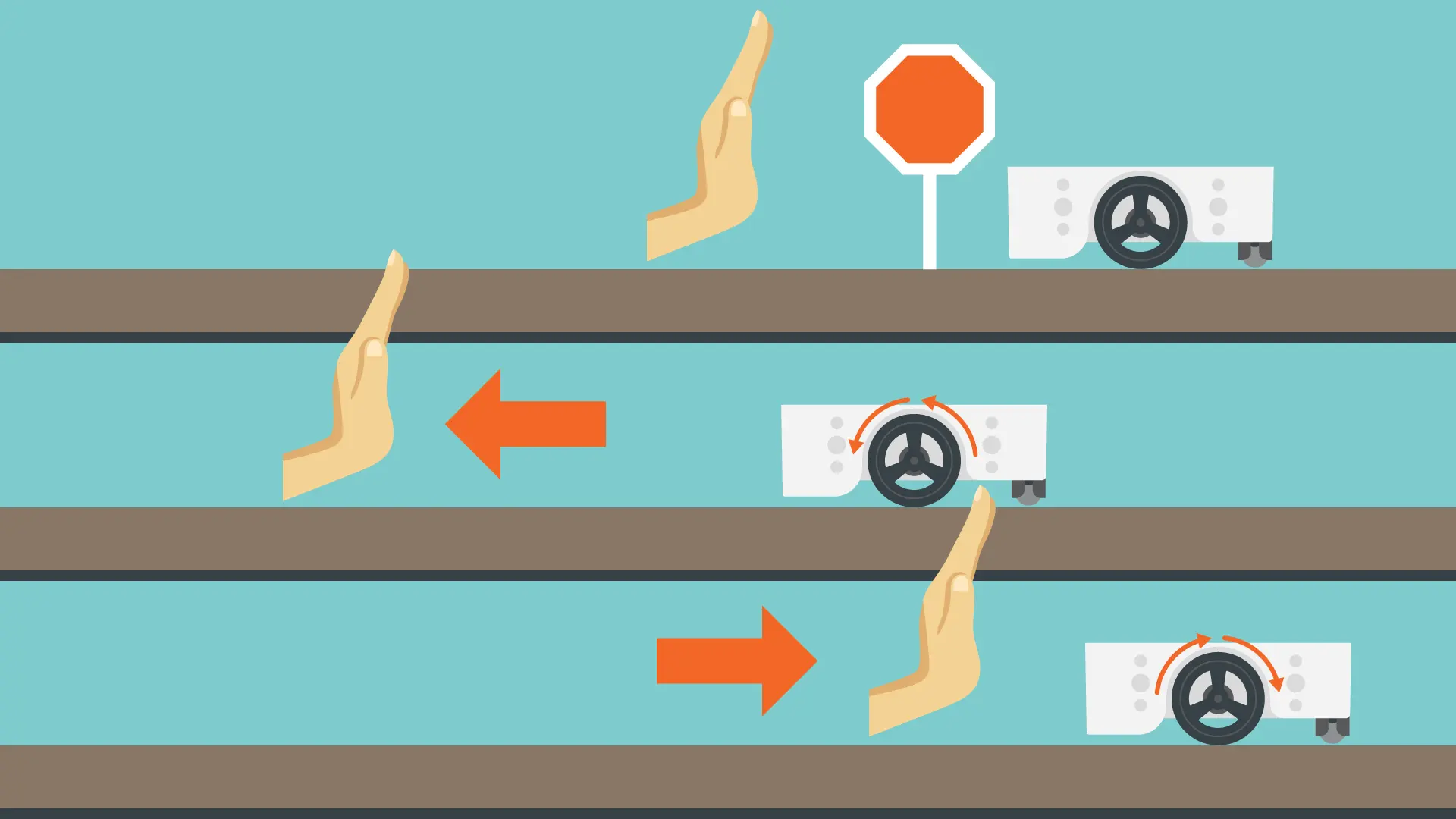
Control con la mano
Aquí trataremos de hacer que ALVIK responda a la posición de nuestra mano a través de el sensor ultrasonidos que tiene en frente suyo. Tendrá que intentar permanecer en una distancia intermedia con lo que tiene enfrente suyo.
from arduino_alvik import ArduinoAlvik
from time import sleep
import sys
alvik = ArduinoAlvik()
alvik.begin()
sleep(5)
#ESTABLECER VELOCIDAD
speed = 30
#IMPRIMIR VALORES Y ESTABLECER VARIABLES
while True:
try:
center = alvik.get_distance_top()
print(center)
sleep(0.01)
#Si la mano esta cerca, Alvik se va hacia atras
if center <= 12:
alvik.set_wheels_speed(-speed, -speed)
#Si la mano esta lejos, Alvik se acerca
elif center <= 30 and center >= 18:
alvik.set_wheels_speed(speed, speed)
#Si la mano esta en una distancia de 12-18, Alvik se queda quieto
else:
alvik.set_wheels_speed(0, 0)
#INTERRUPCIÓN DEL USUARIO
except KeyboardInterrupt as e:
print('over')
alvik.stop()
sys.exit()
Sigue líneas
Vamos a crear un programa SIGUE LÍNEAS. El objetivo es que el robot ALVIK sea capaz de seguir cualquier trazado de líneas utilizando sus sensores IR
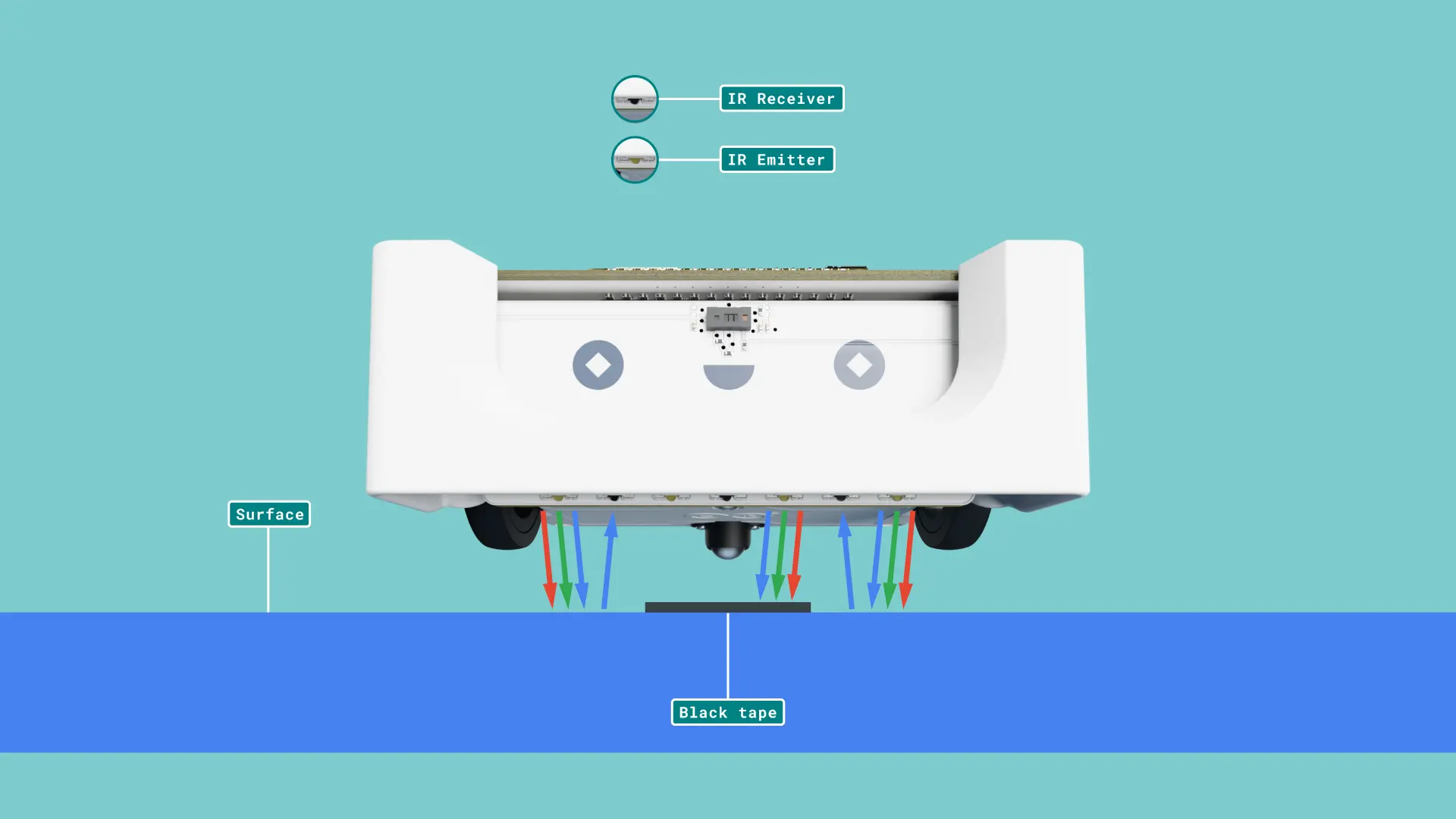
Para poder conseguirlo simplemente tendremos que establecer distintas condiciones de que hacer dependiendo de que sensor del robot detecta el trazado negro.
En este programa también hemos hecho que el robot nos trasmita los valores de los distintos sensores y que el usuario pueda interrumpir el proceso (todo suponiendo que el robot está conectado al equipo).
from arduino_alvik import ArduinoAlvik
from time import sleep
import sys
alvik = ArduinoAlvik()
alvik.begin()
sleep(5)
#VELOCIDAD DEL ROBOT
base_speed = 30
#IMPRIMIR VALORES DE LOS SENSORES
while True:
try:
ir_left, ir_center, ir_right = alvik.get_line_sensors()
print(ir_left, ir_center, ir_right)
sleep(0.01)
#Condiciones de giro, avance y parar
if ir_center > 300:
alvik.set_wheels_speed(base_speed, base_speed)
elif ir_left > 300:
alvik.set_wheels_speed(0, base_speed)
elif ir_right > 300:
alvik.set_wheels_speed(base_speed, 0)
else:
alvik.set_wheels_speed(0, 0)
#INTERRUPCION DEL USUARIO
except KeyboardInterrupt as e:
print('over')
alvik.stop()
sys.exit()Evita obstáculos
Programa
El núcleo del programa es la función api
get_distance(unit: str = 'cm')
Es sorprendente el sensor TOF como puede leer no sólo diréctamente sino a los lados :
- left_tof: 45° to the left object distance
- center_left_tof: 22° to the left object distance
- center_tof: center object distance
- center_right_tof: 22° to the right object distance
- right_tof: 45° to the right object distance
El programa es extraido de https://docs.arduino.cc/tutorials/alvik/getting-started/ AuthorJose Garcia
from arduino_alvik import ArduinoAlvik
from time import sleep_ms
import sys
alvik = ArduinoAlvik()
alvik.begin()
sleep_ms(5000) # waiting for the robot to setup
distance = 20
degrees = 45.00
speed = 50.00
while (True):
distance_l, distance_cl, distance_c, distance_r, distance_cr = alvik.get_distance()
sleep_ms(50)
print(distance_c)
if distance_c < distance:
alvik.rotate(degrees, 'deg')
elif distance_cl < distance:
alvik.rotate(degrees, 'deg')
elif distance_cr < distance:
alvik.rotate(degrees, 'deg')
elif distance_l < distance:
alvik.rotate(degrees, 'deg')
elif distance_r < distance:
alvik.rotate(degrees, 'deg')
else:
alvik.drive(speed, 0.0, linear_unit='cm/s')
Resultado
Programas de test
En el repositorio https://github.com/arduino/arduino-alvik-mpy/tree/main/examples podemos encontrar ejemplos para ver el uso de los diferentes sensores y actuadores, por ejemplo
| Sensor name | Part name | Test program name |
|---|---|---|
| RGB Color detection | APDS 9660 | read_color_sensor.py |
| ToF 8x8 Array - up to 350 cm | LSM6DSOX | read_tof.py |
| IMU - 6 degree | VL53L7CX | read_imu.py |
| 3x Line follower | custom made | line_follower.py |
| 7x Touch sensor | AT42QT2120 | read_touch.py |
| Actuator name | Part name | Test program name |
| Geared motors w/ encoder | GM12-N20VA-08255-150-EN | wheels_positions.py |
| RGB LEDs | RGB LEDs | leds_settings.py |
Detector de color
Modificación del read_color_sensor.py
from arduino_alvik import ArduinoAlvik
from time import sleep_ms
import sys
alvik = ArduinoAlvik()
alvik.begin()
while True:
try:
r, g, b = alvik.get_color()
h, s, v = alvik.get_color('hsv')
print(f'RED: {r}, Green: {g}, Blue: {b}, HUE: {h}, SAT: {s}, VAL: {v}')
print(f'COLOR LABEL:')
print ({alvik.get_color_label()})
sleep_ms(1000)
except KeyboardInterrupt as e:
print('over')
alvik.stop()
sys.exit()Detector TOF
Si ejecutamos read_tof.py
from arduino_alvik import ArduinoAlvik
from time import sleep_ms
import sys
alvik = ArduinoAlvik()
alvik.begin()
while True:
try:
L, CL, C, CR, R = alvik.get_distance()
T = alvik.get_distance_top()
B = alvik.get_distance_bottom()
print(f'T: {T} | B: {B} | L: {L} | CL: {CL} | C: {C} | CR: {CR} | R: {R}')
sleep_ms(100)
except KeyboardInterrupt as e:
print('over')
alvik.stop()
sys.exit()
Detecta hasta los obstáculos por arriba
Giro
Si ejecutamos read_imu.py
from arduino_alvik import ArduinoAlvik
from time import sleep_ms
import sys
alvik = ArduinoAlvik()
alvik.begin()
while True:
try:
ax, ay, az = alvik.get_accelerations()
gx, gy, gz = alvik.get_gyros()
print(f'ax: {ax}, ay: {ay}, az: {az}, gx: {gx}, gy: {gy}, gz: {gz}')
sleep_ms(100)
except KeyboardInterrupt as e:
print('over')
alvik.stop()
sys.exit()Vemos como el eje x cambia de -1 0 a 1 según la posición
Robótica para infantil
Se puede hacer un robot tipo Beebot, Colby, Escornabot.
Si no conocéis estos robots mirar el curso de Aularagon

Podemos cargar el siguiente programa, modificado de https://github.com/arduino/arduino-alvik-mpy/blob/main/examples/touch_move.py
from arduino_alvik import ArduinoAlvik
from time import sleep_ms
import sys
alvik = ArduinoAlvik()
alvik.begin()
alvik.left_led.set_color(1, 0, 0)
alvik.right_led.set_color(1, 0, 0)
distancia = 15
movements = []
def blink():
alvik.left_led.set_color(1, 0, 1)
alvik.right_led.set_color(1, 0, 1)
sleep_ms(200)
alvik.left_led.set_color(1, 0, 0)
alvik.right_led.set_color(1, 0, 0)
def add_movement():
global movements
if alvik.get_touch_up():
movements.append('forward')
blink()
while alvik.get_touch_up():
sleep_ms(100)
if alvik.get_touch_down():
movements.append('backward')
blink()
while alvik.get_touch_down():
sleep_ms(100)
if alvik.get_touch_left():
movements.append('left')
blink()
while alvik.get_touch_left():
sleep_ms(100)
if alvik.get_touch_right():
movements.append('right')
blink()
while alvik.get_touch_right():
sleep_ms(100)
if alvik.get_touch_cancel():
movements = []
for i in range(0, 3):
val = i % 2
alvik.left_led.set_color(val, 0, 0)
alvik.right_led.set_color(val, 0, 0)
sleep_ms(200)
while alvik.get_touch_cancel():
sleep_ms(100)
def run_movement(movement):
if movement == 'forward':
alvik.move(distancia, blocking=False)
if movement == 'backward':
alvik.move(-distancia, blocking=False)
if movement == 'left':
alvik.rotate(90, blocking=False)
if movement == 'right':
alvik.rotate(-90, blocking=False)
while not alvik.get_touch_cancel() and not alvik.is_target_reached():
alvik.left_led.set_color(1, 0, 0)
alvik.right_led.set_color(1, 0, 0)
sleep_ms(100)
alvik.left_led.set_color(0, 0, 0)
alvik.right_led.set_color(0, 0, 0)
sleep_ms(100)
while alvik.get_touch_ok():
sleep_ms(50)
while not (alvik.get_touch_ok() and len(movements) != 0):
add_movement()
sleep_ms(50)
try:
while True:
alvik.left_led.set_color(0, 0, 0)
alvik.right_led.set_color(0, 0, 0)
for move in movements:
run_movement(move)
if alvik.get_touch_cancel():
break
movements = []
while not (alvik.get_touch_ok() and len(movements) != 0):
alvik.left_led.set_color(1, 0, 0)
alvik.right_led.set_color(1, 0, 0)
alvik.brake()
add_movement()
sleep_ms(100)
except KeyboardInterrupt as e:
print('over')
alvik.stop()
sys.exit()El resultado es que perfectamente se puede usar como robótica en infantil
Los robots Beebot, Colby, Escornabot. utilizan la distancia de 15cm de desplazamiento, justo lo mismo que los palos depresores de lengua, luego fácilmente uno puede hacer un circuito :