# Pin pong Telegram
Como paso previo a enviar y recibir mensajes, vamos a realizar los pasos de este vídeo
[https://www.youtube.com/watch?v=eZkb9omr-sA](https://www.youtube.com/watch?v=eZkb9omr-sA)
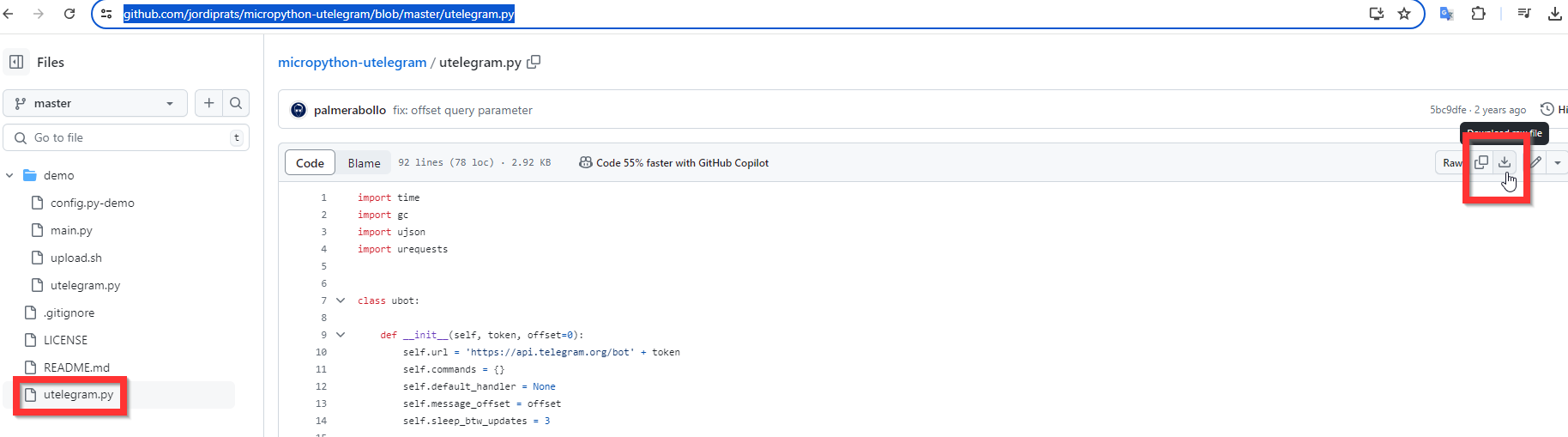
##### **Paso 1: Librería uTelegram.py**
Del repositorio de Jordi Prats
[https://github.com/jordiprats/micropython-utelegram/blob/master/utelegram.py](https://github.com/jordiprats/micropython-utelegram/blob/master/utelegram.py)
[](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-06-22-09-11-micropython-utelegram-utelegram-py-at-master-jordiprats-micropython-utelegram.png)
```python
import time
import gc
import ujson
import urequests
class ubot:
def __init__(self, token, offset=0):
self.url = 'https://api.telegram.org/bot' + token
self.commands = {}
self.default_handler = None
self.message_offset = offset
self.sleep_btw_updates = 3
messages = self.read_messages()
if messages:
if self.message_offset==0:
self.message_offset = messages[-1]['update_id']
else:
for message in messages:
if message['update_id'] >= self.message_offset:
self.message_offset = message['update_id']
break
def send(self, chat_id, text):
data = {'chat_id': chat_id, 'text': text}
try:
headers = {'Content-type': 'application/json', 'Accept': 'text/plain'}
response = urequests.post(self.url + '/sendMessage', json=data, headers=headers)
response.close()
return True
except:
return False
def read_messages(self):
result = []
self.query_updates = {
'offset': self.message_offset + 1,
'limit': 1,
'timeout': 30,
'allowed_updates': ['message']}
try:
update_messages = urequests.post(self.url + '/getUpdates', json=self.query_updates).json()
if 'result' in update_messages:
for item in update_messages['result']:
result.append(item)
return result
except (ValueError):
return None
except (OSError):
print("OSError: request timed out")
return None
def listen(self):
while True:
self.read_once()
time.sleep(self.sleep_btw_updates)
gc.collect()
def read_once(self):
messages = self.read_messages()
if messages:
if self.message_offset==0:
self.message_offset = messages[-1]['update_id']
self.message_handler(messages[-1])
else:
for message in messages:
if message['update_id'] >= self.message_offset:
self.message_offset = message['update_id']
self.message_handler(message)
break
def register(self, command, handler):
self.commands[command] = handler
def set_default_handler(self, handler):
self.default_handler = handler
def set_sleep_btw_updates(self, sleep_time):
self.sleep_btw_updates = sleep_time
def message_handler(self, message):
if 'text' in message['message']:
parts = message['message']['text'].split(' ')
if parts[0] in self.commands:
self.commands[parts[0]](message)
else:
if self.default_handler:
self.default_handler(message)
```
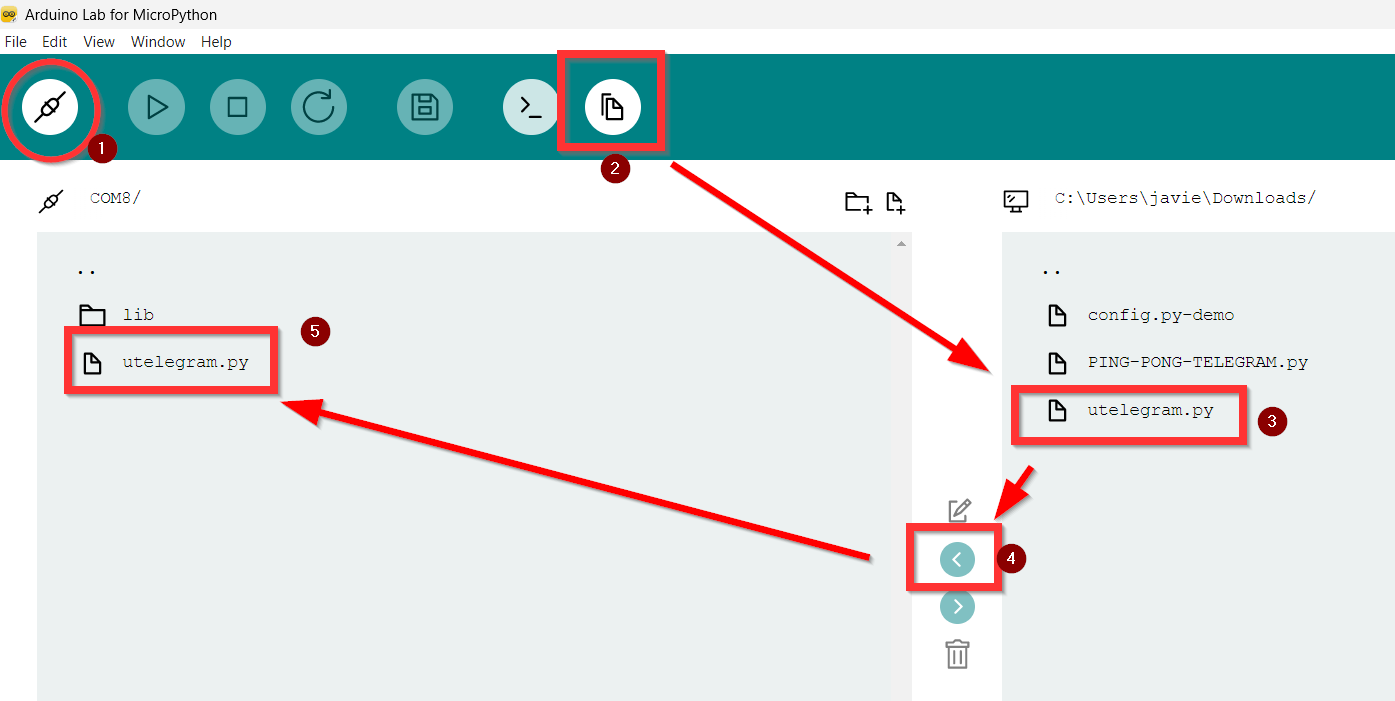
Y la cargamos dentro de nuestro ESP32, ejecutamos Arduino Lab for MicroPython, conectamos, vamos al gestor de archivos y lo llevamos dentro del ESP32 Alvik
[](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-06-22-12-32-arduino-lab-for-micropython.png)
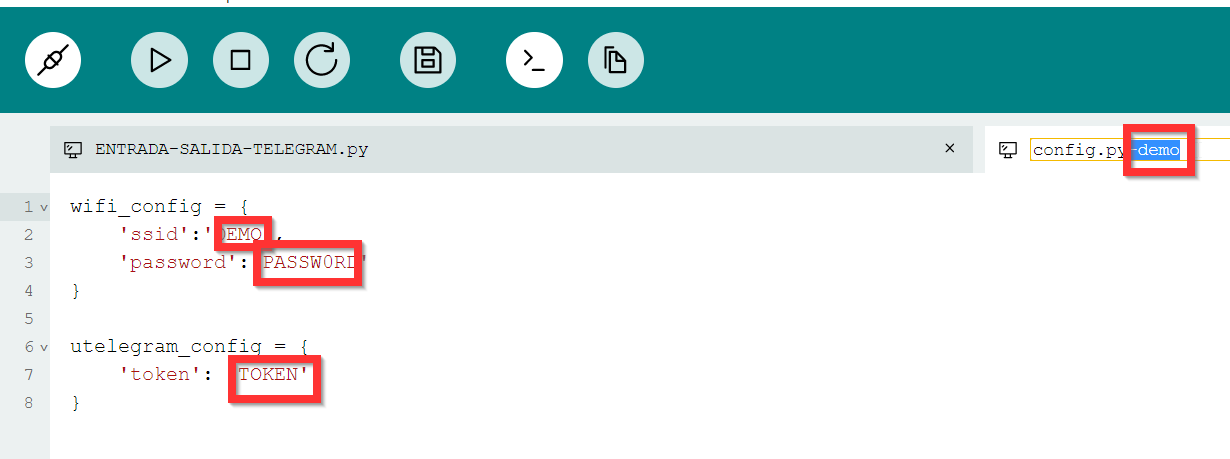
##### **Paso 2 Archivo config.py**El archivo config.py no es más que el archivo que contiene la wifi y el token, se puede descargar de [https://github.com/jordiprats/micropython-utelegram/blob/master/demo/config.py-demo](https://github.com/jordiprats/micropython-utelegram/blob/master/demo/config.py-demo) o también se puede copiar y pegar de aquí mismo
```
wifi_config = {
'ssid':'DEMO',
'password':'PASSW0RD'
}
utelegram_config = {
'token': 'TOKEN'
}
```
Ponemos los valores de nuestra wifi SSID, PASSWORD y TOKEN y borramos del nombre el -demo y lo dejamos como config.py
[](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-06-23-01-23-arduino-lab-for-micropython.png)
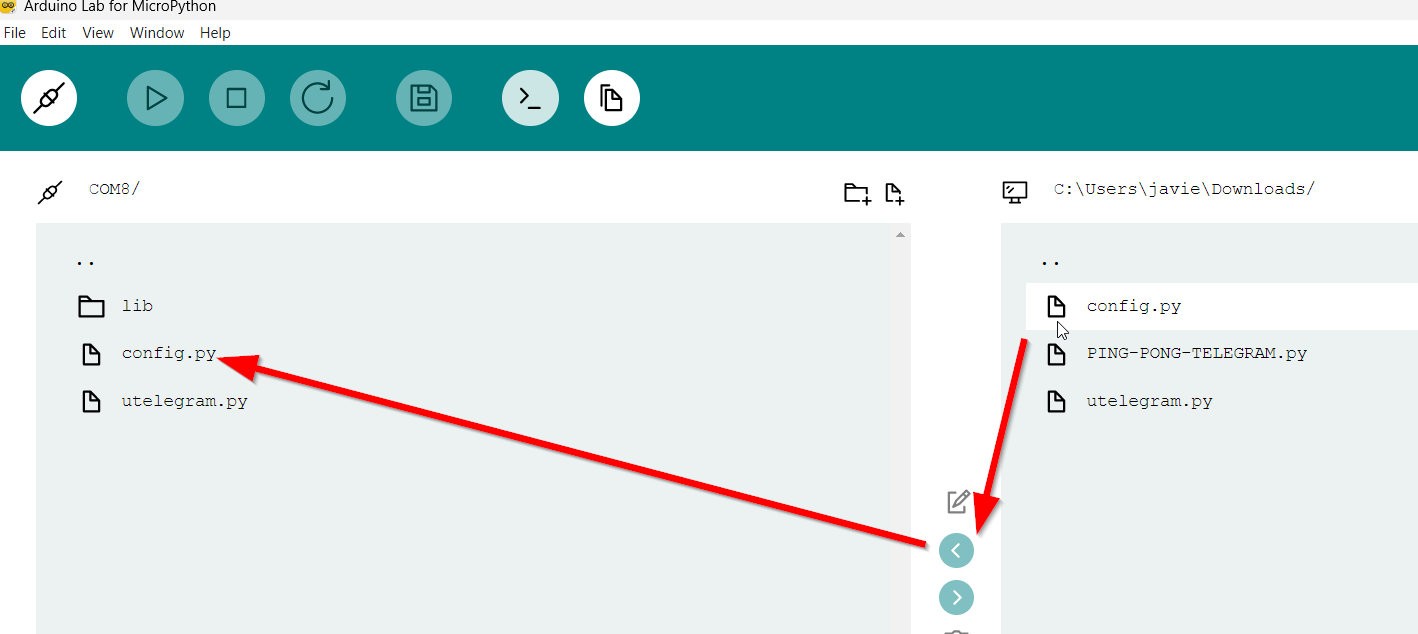
y como antes, lo pasamos al ESP32 Alvik
[](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-06-23-05-34-arduino-lab-for-micropython.png)
Se podría poner esa información en el código del programa principal main.py tal y como el programa de la página [https://libros.catedu.es/books/arduino-alvik/page/mensajes-a-telegram](https://libros.catedu.es/books/arduino-alvik/page/mensajes-a-telegram)
##### **Paso 3 Programa principal main.py**
El programa lo podemos descargar de [https://github.com/jordiprats/micropython-utelegram/blob/master/demo/main.py](https://github.com/jordiprats/micropython-utelegram/blob/master/demo/main.py)
o de aquí mismo
tal cual, no hay que poner nuestro ssid, ni password ni token pues lo "lee" de config.py
🤔No sé por qué hay que esperar 20 segundos en utime.sleep(20) 🤷♂️sospecho que necesita tiempo para estar preparado para "escuchar"
Y lo llevamos al ESP32
[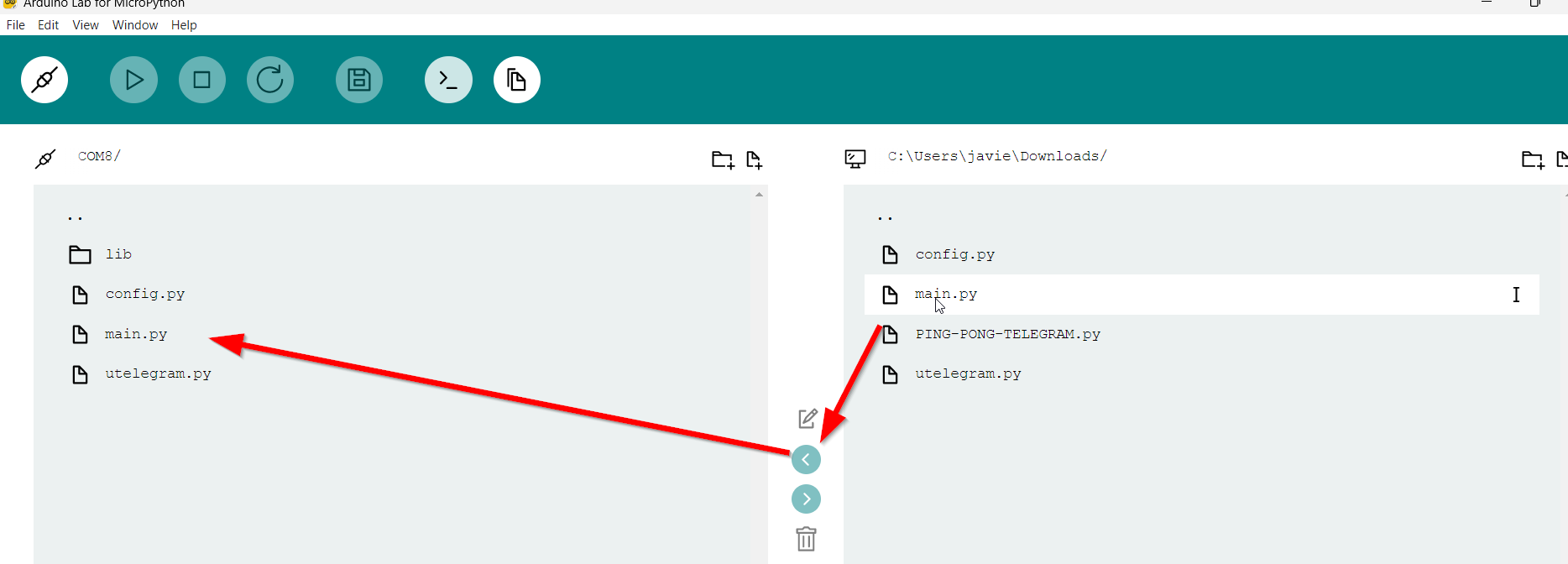](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-06-23-12-08-arduino-lab-for-micropython.png)
##### **Ejecución**
Pulsamos el main.py del ESP32 (no hace falta encender Alvik pues todas las instrucciones son sólo del ESP32), ESPERAR 20 SEGUNDOS hasta que aparezca BOT LISTENING
[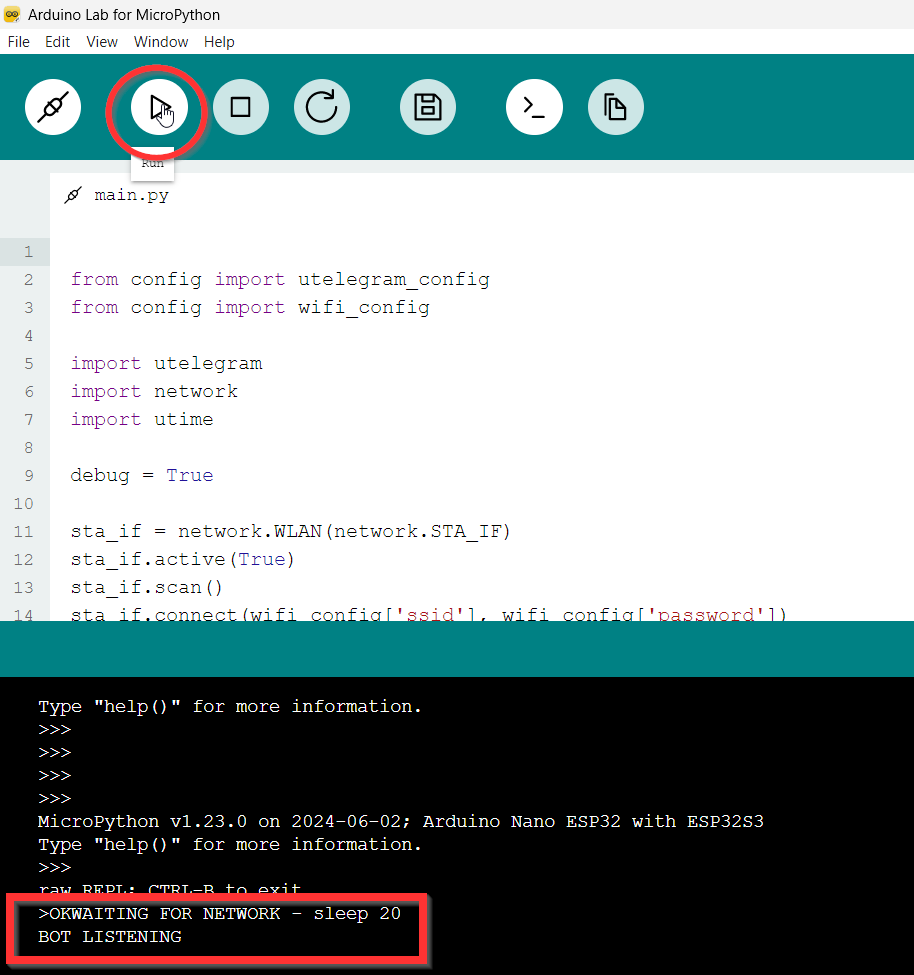](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-06-23-14-35-arduino-lab-for-micropython.png)
Nos vamos a Telegram al usuario del bot que hemos creado, le tecleamos **/ping** y contesta el ESP32 **pong**
[](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-06-23-17-14-javierarduino-mozilla-firefox.png)