Actuadores y otras salidas
Esta página es un repaso rápido de las posibles salidas de los robots
NO LEAS TODOS SÓLO LOS QUE TIENE TU ROBOT
¿Qué es un actuador?
Un actuador es el nombre genérico que empleamos para cualquier dispositivo capaz de realizar acciones en el mundo físico y que podremos controlar desde un autómata o procesador como Arduino. En particular, usamos el nombre actuador para los dispositivos que son capaces de generar movimiento. Luis LLamas CC-BY-NC-SA
ACTUADORES
Motores baja potencia
Con el Arduino podemos usar motores de corriente continua de juguete como en la figura, aptos para poner un ventilador. Ejemplo de uso Smart Home para microbit

Motores con algo de potencia
Si quieres usar un motor para mover unas ruedas, ya pide más corriente, no se puede conectar directamente al la placa (Arduino, esp32 etc..). El de la figura es típico en robótica y lleva reductores dentro para bajar la velocidad :

Necesita una alimentación extra, como el LM298N y las pilas., o el B6612FNG o una shield específica.

CC-BY-NC Luis Llamas
Ejemplos de uso lo puedes ver en
- Curso mClon con nanoArduino con el B6612FNG
- Curso Rover con Arduino con la shield L293D ESP-12E para el NODE MCU que internamente tiene el LM298N
- Curso Arduino con código con LM298N y también con un transistor
Los motores pueden (y deben) de estar conectados a salidas PWM de tal manera que se pueda regular la potencia y por lo tanto la velocidad.
Servos
Un servo convencional es un motor donde fijamos el ángulo desde 0º a 180º, pero si queremos una rotación, existen servos rotatorios que simplemente tienen su velocidad de rotación controlada
Ejemplos de uso de servos:
- Curso Arduino con código
- Curso brazo robótico del mClon con nanoArduino
- Apertura de barrera por ultrasonidos en curso Arduino con ArduinoBlocks
- Tractor entrando en el corral Arduino con EchidnaShield
- Apertura de puerta Domótica con Arduino
- Servo con PicoBrick
- Apertura ventana y puerta en Smarth Home para microbit
- Smart Agriculture Kit para micro:bit
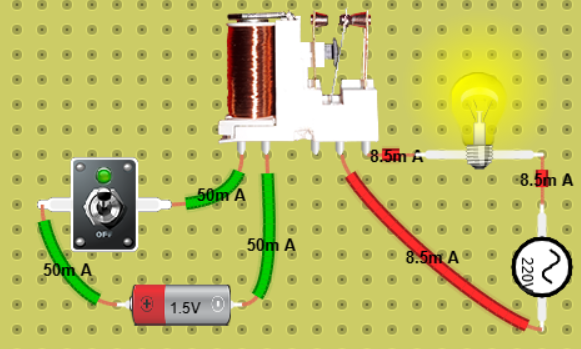
Relés
Un relé es un interruptor activado por un electroimán, lo que permite independizar los circuitos. En el dibujo se ve que el circuito rojo de 220V esta separado del verde, de sólo 1.5V. Pero es el circuito verde que al funcionar, hace que el electroimán mueva el interruptor del relé y encienda la bombilla. El objetivo es que he podido encender una bombilla de 220V sin tocar los 220V peligrosos. En el circuito verde, el interruptor puede ser un Arduino. Experiméntalo en este simulador.
- Un ejemplo con Arduino en Luis LLamas
- Un ejemplo de uso en Picobricks
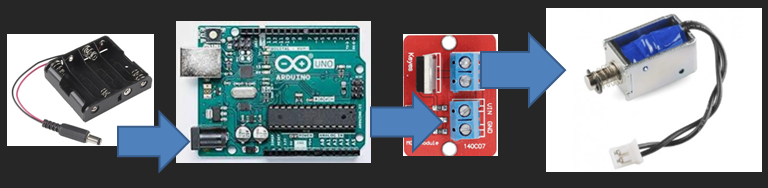
Electroimán
El electroimán no se puede conectar directamente, utilizaremos una etapa de potencia, por ejemplo el transistor el IRF520N que amplifique la señal del Arduino, pues las salidas de Arduino no tienen potencia para mover el electroimán. Para dar esa potencia utilizaremos otra fuente externa, unas pilas:
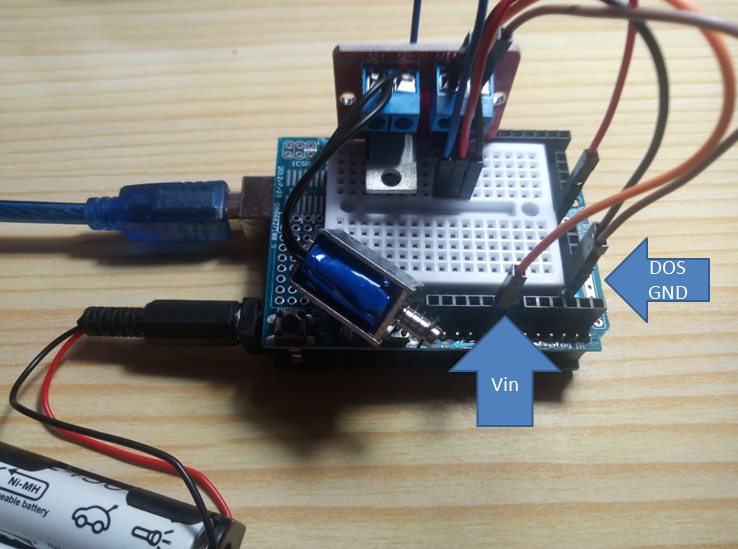
Las conexiones son :
- SIG del IRF520N a una salida digital por ejemplo D13
- VCC del IRF5020N al 5V del ARDUINO
- Los dos GND del IRF520N a GND del ARDUINO
- V+ y V- del IRF5020N al solenoide, da igual qué cable pues no tiene polaridad.
- VIN del IRF520N al VIN del ARDUINO (son los voltios de la pilas)
Motor paso a paso
Igual que el electroimán, necesitamos un controlador que nos de la potencia necesaria para mover el motor, el ULN2003

Imagen BY-NC-SA de Luis Llamas
También igual que el electroimán, necesitamos una potencia extra con las pilas:

Conexión :
- Cuatro pines digitales del ARDUINO al IN1,IN2,IN3,IN4 del ULN2003 por ejemplo D10,D11,D12,D13
- El conector blanco del ULN2003 al motor paso a paso
- El (+) del ULN2003 al Vin del ARDUINO
- El (-) del ULN2003 al GND del ARDUINO

La configuración más sencilla es la rotación simple en sentido horario (llamada fase1) :

Imagen BY-NC-SA de Luis Llamas
Es decir:
| Paso | IN1=D10 | IN2=D11 | IN3=D12 | IN4=D13 |
|---|---|---|---|---|
| Paso 1 | ON | OFF | OFF | OFF |
| Paso 2 | OFF | ON | OFF | OFF |
| Paso 3 | OFF | OFF | ON | OFF |
| Paso 4 | OFF | OFF | OFF | ON |
Si has entendido este ejemplo serás capaz de realizar las configuraciones que desees.
OTRAS SALIDAS
No son actuadores pues no representan movimiento pero son también salidas del Arduino como los actuadores, luego lo vemos en esta página
Buzzer activo
Reproduce un tono de una frecuencia determinada por el fabricante cuando recibe un '1' digital. Su conexión es muy simple:
- GND a GND y VCC a 5V (ojo que están a los dos extremos, marcados en rojo y en negro)
- OUT o también señalado como I/O a un pin digital, por ejemplo D13

Ejemplos de uso:
- Domótica con Arduino: Apertura puerta con mBlock
- Domótica con Arduino Apertura puerta con código
Buzzer pasivo
La diferencia de un buzzer activo con el pasivo es que el pasivo hay que mandar la onda que se tiene que reproducir, como Arduino no puede reproducir onda puras (senoidales analógicas), se le envía ondas cuadradas con la frecuencia que se pretende reproducir. Como se puede ver en la figura, no tiene elementos auxiliares para reproducir un tono, es simplemente un altavoz.

Ejemplos de uso
LEDS Y OTROS ELEMENTOS VISUALIZADORES
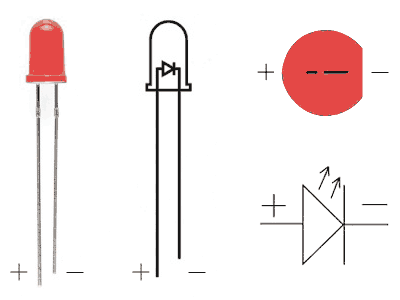
Led normal
Un diodo es la unión de dos semiconductores P-N que sólo permite la corriente en un sentido. Un diodo LED es un diodo, que al pasar esta corriente emite una luz. Hay de 3mm y de 5mm de grosor, transparentes, traslúcidos y de colores (realmente son traslúcidos tintados)
Tenemos pues que respetar su polaridad para que funcione:
Fuente Luis LLamas CC-BY-NC Encender LED con Arduino
Si alimentamos el LED con una tensión inferior a su tensión de polarización directa Vd ±1,4V-3,8V el led no luce. si alimentamos con una tensión superior, la corriente que circula se dispara por lo que se rompe. Conclusión: Hay que poner una resistencia limitante. Para calcularla te recomiendo la página de Luis Llamas Encender LED con Arduino
Aquí puedes ver un ejemplo de semáforo en el curso Arduino con código

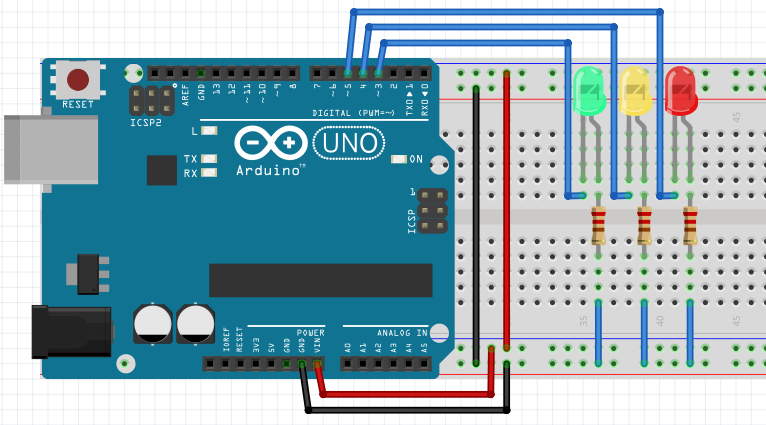
Se puede conectar directamente pues las salidas de Arduino tienen una limitación interna de 20mA como en este ejemplo https://www.youtube.com/watch?v=EFFSLvIF9rY
Los LEDS igual que los motores pueden se encendidos o todo o nada con salidas digitales 0 y 1 o salidas PWM de esta manera conseguimos luminosidades medias, en esta práctica con el potenciómetro se regula la intensidad de la luz de un LED
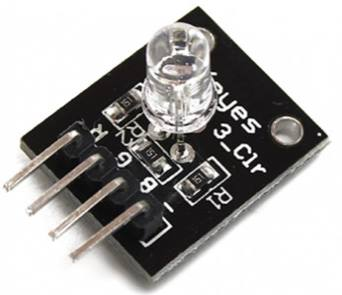
Led RGB
Se trata de un encapsulado que integra 3 leds de los tres colores básicos. Cada color básico se puede regular desde 0 a 255 de intensidad, luego tenemos 16 millones de tonalidades diferentes.
Un ejemplo de su uso lo puedes ver en
Existen LEDS RGB que se comunican unos a otros, (ver este ejemplo en el curso mClon) como las tiras de leds RGB que cambian de color todos simultáneamente.
Neopixel
La cinta LED RGB se basa en el chip controlador WS2812B de Neopixel con el cual podemos tener el control de cada pixel y de cada color, ya sea rojo, verde y azul a través de un solo cable de datos.
Los WS2811, WS2812 y WS2812B son LED que disponen de lógica integrada, por lo que es posible variar el color de cada LED de forma individual (a diferencia de las tiras RGB convencionales en las que todos los LED cambian de color de forma simultánea). Están basados en el LED 5050, llamado así porque tiene un tamaño de 5.0 x 5.0 mm.
Es un LED de bajo consumo y alto brillo, que incorpora en un único encapsulado los 3 colores RGB. La genial novedad del WS2812B (y resto de familia) es añadir un integrado dentro de cada LED, que permite acceder a cada pixel de forma individual. Por este motivo este tipo de LED se denominan “individual addressable”. Esto abre la puerta a un sinfín de aplicaciones y combinaciones, que van desde dotar de iluminaciones distintas zonas con una única tira, animaciones complejas, o incluso generar pantallas enteras de alta luminosidad....
A los LED WS2812B también se les denomina NeoPixel
Luis Llamas CC-BY-NS-SA https://www.luisllamas.es/arduino-led-rgb-ws2812b/

- Smart Home para Microbit con 4 leds RGB Neopixel
- Smart Home para ESP32
- Smart Agriculture Kit micro:bit
Láser
El diodo láser es un elemento motivador, barato y fácil de usar con el Arduino pues se activa digitalmente, si enviamos un 1 emite un rayo láser. Un ejemplo de uso lo puedes ver en la Alarma por láser en Domótica con Arduino

Si quieres saber más de este componente, te recomendamos esta página de Luis Llamas.
Si tienes que comprar uno, es importante que no sea superior a 5mW, pues puede dañar permanentemente la retina del ojo [+info].
El modelo que proponemos es de 1mW, no obstante, EVITA SIEMPRE QUE EL LÁSER APUNTE A LOS OJOS especialmente con niños.

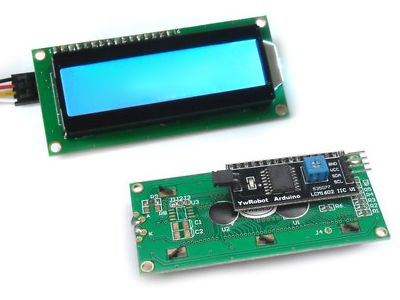
Display LCD
Si queremos visualizar datos de forma independiente del ordenador, existen matrices de led que puedes ver en los cursos de mBot o mClon pero lo mejor es una pantalla Liquid Crystal Display y la mejor forma de conectar esta interfaz es en serie utilizando el protocolo I2C.
Ejemplo de uso :
CC-BY-SA Luis Llamas
No confundas Display LCD con matriz de LEDs , o una OLED
Aclarando conceptos: Protocolo I2C
Es un protocolo de emitir los datos con sólo dos cables SDA (los datos) y SCL (reloj) y además pueden compartir varios dispositivos SLAVE) para ello la placa Arduino ESP32, microbit... (MASTER) tiene que saber qué dirección tiene cada dispositivo IMPORTANTE:
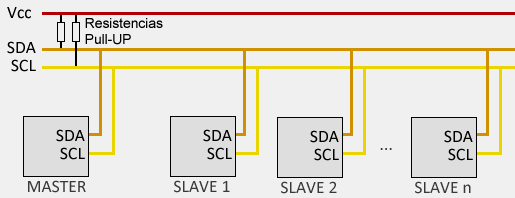
Fuente Luis Llamas ArduinoI2C CC-BY-SA
Aclarando conceptos: Lógica invertida
Igual que vimos en sensores, con las configuraciones Pull up y Pull down, las salidas de cualquier actuador PUEDEN SER LÓGICA INVERTIDA, mira en este NodeMCU (básicamente es un Arduino con wifi, aquí está conectado con el servidor Blynk) como funciona al revés, cuando apretamos, por lo tanto enviamos un uno a la salida, se apaga la salida !!