Cutebot+AI lens
Objetivos y contenidos
ATENCIÓN PARA HACER ESTE CURSO ES NECESARIO SABER PROGRAMAR LA PLACA MICROBIT CON MAKECODE
CONTENIDOS:
-
- CUTEBOT
- Primeros pasos y retos con Cutebot
- Retos
- AI LENS
- Introducción (qué es, soporte, configuración)
- Programas
- CUTEBOT
OBJETIVOS
Conocer la extensión CUTEBOT sus posibilidades didácticas como robot tipo suelo, además de añadir la AI LENS que mediante INTELIGENCIA ARTIFICIAL se pueden realizar más programas y más gamificación educativa, realizando un completo conocimiento de la didáctica del pensamiento computacional y de la robótica para nivel de primaria-secundaria usando programación por bloques accesible a un amplio alumnado.
Cutebot
Montaje del kit
a primera vez que se usa el kit viene sin montar, el ensamblaje es muy sencillo, mira este vídeo sobre todo a partir del minuto 2:00
Cutebot - Modelo educativo by GmedranoTIC on Sketchfab
Dos prácticas con Cutebot
EVITA OBSTÁCULOS
Un evita obstáculos muy muy sencillo podría ser este:
¿Puedes mejorarlo? por ejemplo si encuentra un obstáculo que retroceda un poco y luego que gire
SIGUE LÍNEAS
Este programa que se propone es el siguiente :
Más prácticas con Cutebot
En la wiki de la empresa de Cutebot: Elecfreaks https://elecfreaks.com/learn-en/microbitKit/smart_cutebot/index.html encontrarás 14 prácticas muy interesantes, que no podemos reproducir en este libro por tener los derechos reservados :
- Case 01: Move Forward or Reverse at the Full Speed
- Una práctica sencilla que según el botón que aprietas en en microbit ejecuta una velocidad u otra
- Case 02: Speed Up Gradually
- El cutebot va ganando velocidad
- Case 03: Dance in Figure-of-eight
- El cutebot hace el recorrido de un 8
- Case 04: Run at Random
- El cutebot danza de forma aleatoria
- Case 05: Automatic Headlights.
- Si es de noche, se encienden las luces
- Case 06: Steering&Clearance Lamps.
- Según los botones, las lámparas flashean 5 veces
- Case 07: Fall-arrest Cutebot.
- En la wiki pone que el propósito es que cuando detecta el borde de la mesa, vuelve atrás y gira. ATENCIÓN no aconsejable hacerlo en una mesa, por el peligro de caída, se recomienda hacer una figura cerrada con cinta negra y el cutebot no saldrá del recinto.
- Case 08: Run Along the Black Line.
- El típico siguelíneas
- El típico siguelíneas
- Case 09: Autonomous Obstacle Avoidance.
- El típico salva-obstáculos
- Case 10: Car Following with A Fixed Distance.
- Cutebot se mueve siguiendo tu mano, manteniendo una distancia fija.
- Case 11: micro:bit Remote Control.
- coche teledirigido con otro microbit y los botones
- coche teledirigido con otro microbit y los botones
- Case 12: Remote Control the Cutebot with micro:bit Accelerometer.
- el mismo ejemplo pero usando el acelerómetro (inclinación) en vez de los botones
- (omitimos este ejemplo pues requiere un joystick no proporcionado en el kit)
- Case 14: IR Remote Control Car.
-
- coche teledirigido pero con el mando IR
-
- Case15: Seeking the Light.
- Cutebot sigue la luz
Hay más retos pero con accesorios que no se proporciona en el kit básico
AI LENS
AI LENS
ATENCIÓN LA CUTEBOT TIENE QUE SER VERSIÓN IGUAL O SUPERIOR A LA 3.0 (dónde puedo ver la versión)
QUÉ ES
AI LENS es una cámara dotado de software de inteligencia artificial para reconocer objetos (líneas, cartas predefinidas, caras y expresiones y bolas de colores) ¿Dónde se puede comprar?
 Aplicaciones. Fuente Ship Elecfreacks
Aplicaciones. Fuente Ship Elecfreacks
Su comunicación con las placas electrónicas es por el protocolo I2C por lo tanto es compatible con casi todas las placas del mercado, aquí en este curso lo vamos a contextualizar a la Microbit y concretamente a la carcasa CUTEBOT
HARDWARE
- Tiene una pantalla de 1.3 pulgadas que es muy cómodo para ver qué es lo que ocurre.
- Lente de resolución 240x240 y ángulo 90º de apertura.
- Conexión IIC con protocolo V831
- La cámara se suministra con dos cables, uno RJ11-Dupond (que es el que utilizaremos) otro RJ11-RJ11, dos bolás, y cartas
Para ver la versión que tiene nuestro AI LENS es en esta esquina cuando lo encendemos :

Si queremos actualizar este firmware, hay que descargar el firmware y para cargarlo en la AI LENS instalar un flasheador del 341. Para ver los pasos, recomendamos visitar la página https://www.elecfreaks.com/learn-en/microbitplanetX/ai/Plant_X_EF05045.html
SOFTWARE
Podemos programar nuestro AI LENS con PYTHON ver https://www.elecfreaks.com/learn-en/microbitplanetX/ai/Plant-X-EF05045-python-en.html pero nosotros lo vamos a programar en bloques con MAQUECODE más apropiado para Primaria y primeros cursos de ESO, esto lo veremos en las próximas páginas.
Soporte
ATENCIÓN LA CUTEBOT TIENE QUE SER VERSIÓN IGUAL O SUPERIOR A LA 3.0 (dónde puedo ver la versión)
Existen muchas maneras de montar nuestro AI LENS al CUTEBOT
Propuesta de CATEDU
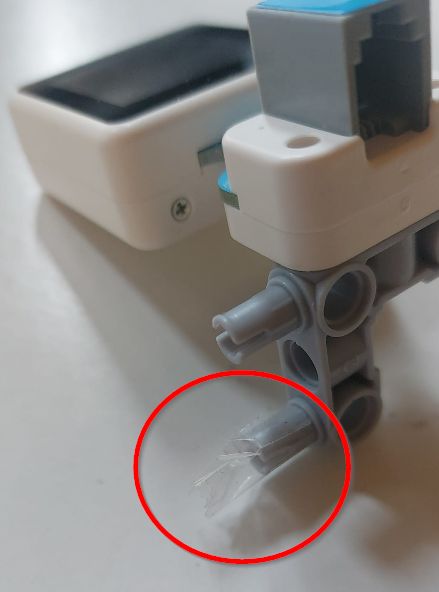
Nuestra propuesta se basa en utilizar piezas de Lego compatibles con la AI LENS y un separador de nylon de PCB rosca M3
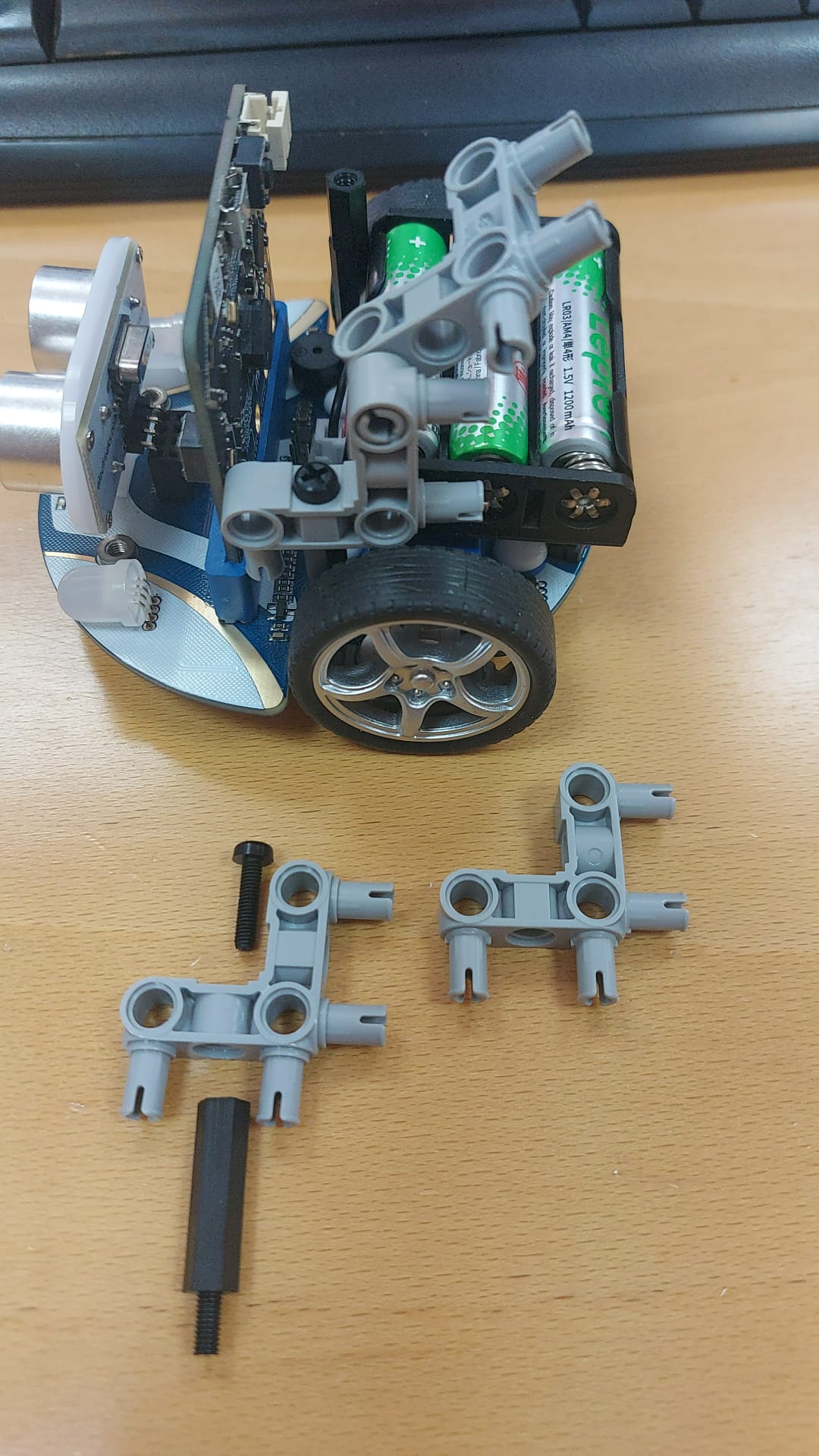
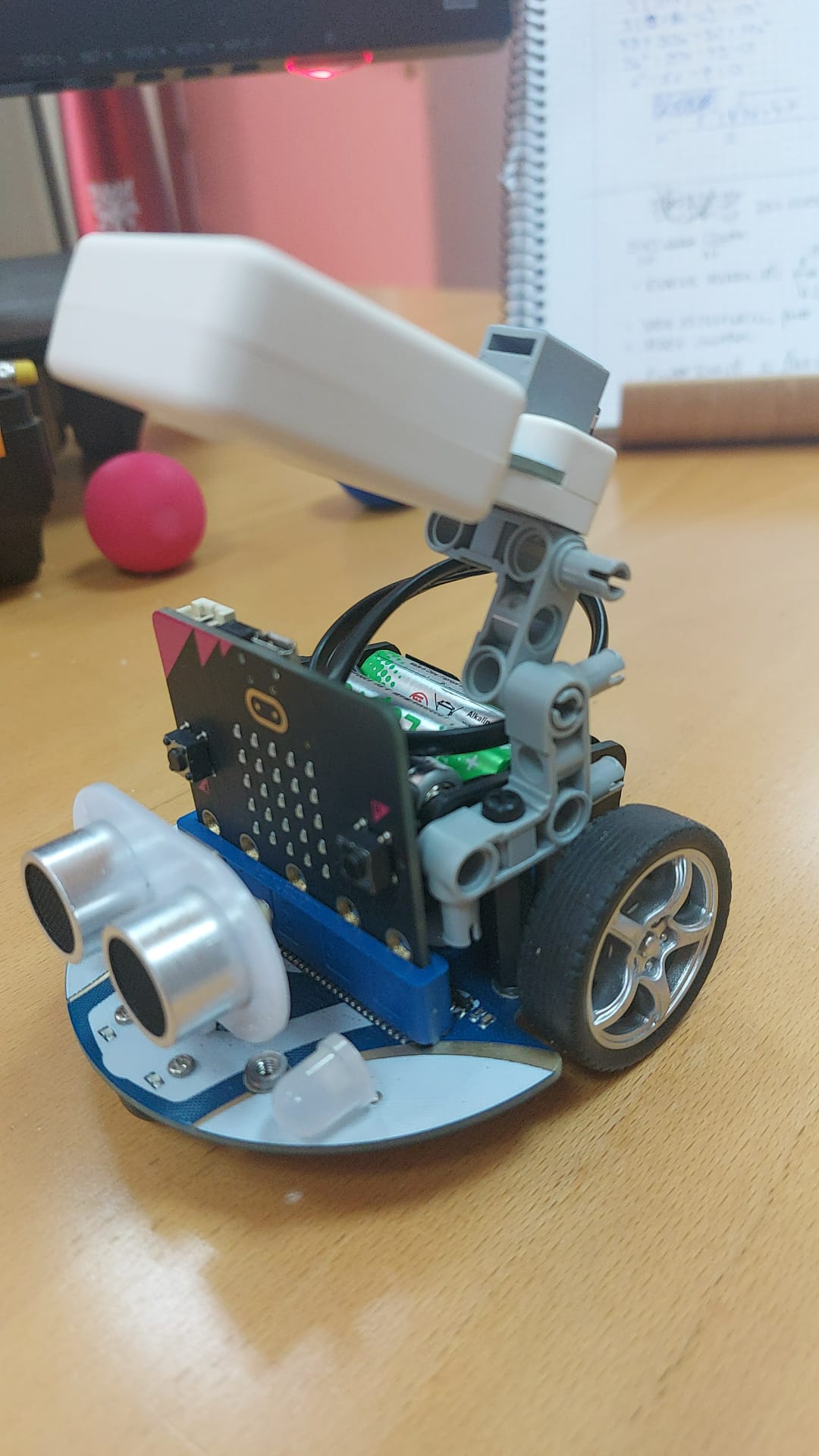
Con el tiempo no tiene freno, y la cámara "va suelta" una solución es un trozo de celo que haga de freno:
- Enlace piezas separador PCB Nylon M3 https://www.amazon.es/gp/product/B0942FV9GQ/
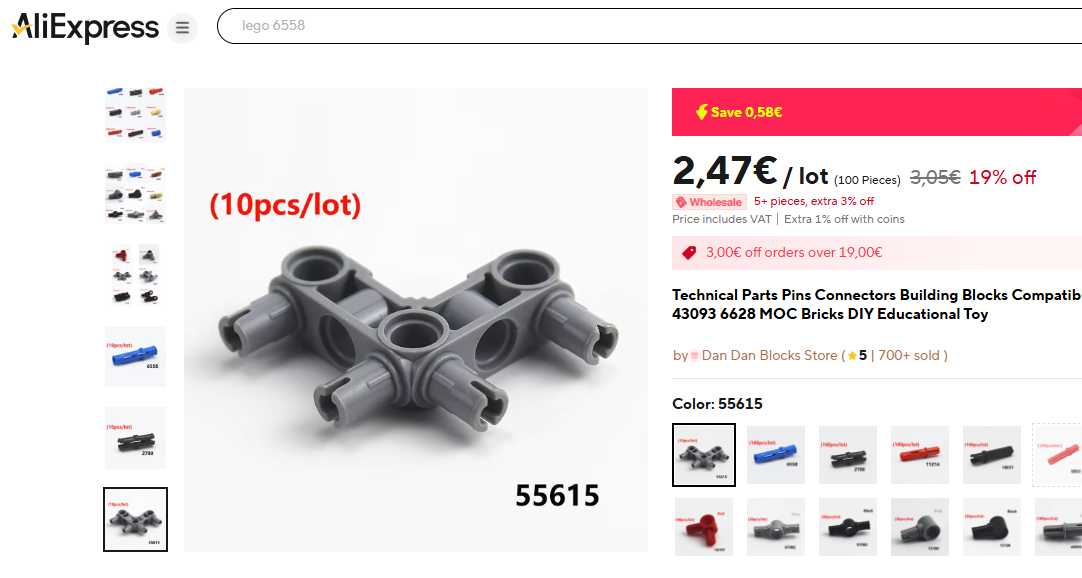
- Enlace piezas Lego https://www.aliexpress.com/item/1005004693880894.html

Conexión
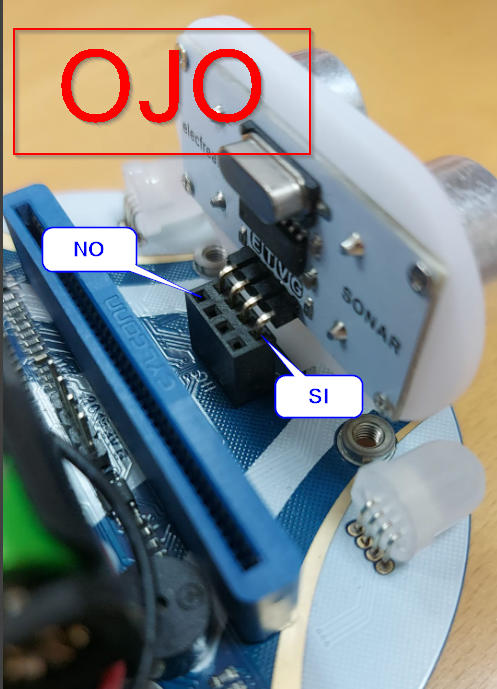
Antes de montar la AI LENS recomendamos por cuestiones de espacio, y sin la tarjeta microbit puesta conectar el cable de AI LENS a los pines I2C de la placa que está detrás del zócalo de la microbit
Aquí tienes una foto para que veas dónde

Aquí tienes dónde están estos pines, se ha retirado la batería para que se vea mejor:

IMPORTANTE tienes que respetar el orden y poner el color de cada cable en su pin correspondiente
- GND el cable negro
- 3V el cable rojo
- 18 el cable verde
- 20 el cable amarillo


Fuente https://www.elecfreaks.com/
Propuesta oficial
La propuesta oficial pasa por comprar un pack de BATERIA DE LITIO
Esta propuesta no nos gusta desde CATEDU pues la batería de Litio está expuesta al exterior y a la manipulación, la manipulación de estas baterías PUEDE SER PELIGROSAS llegando a la explosión, ver https://libros.catedu.es/books/rover-marciano-alphabot-rasbperry-y-python/page/121-ojo-con-las-baterias-18650
El montaje está especificado en esta página https://wiki.elecfreaks.com/en/microbit/microbit-smart-car/microbit-smart-cutebot/cutebot-ailens/cutebot_case19/
El pack cuesta unos 13€ y con estas piezas:

Montas una batería especial de LITIO en el Cutebot

Y con las pizas de LEGO puedes montar el AI LENS
![]()
El resultado

Otras propuestas
En internet puedes encontrar soluciones ingeniosas, por ejemplo esta con impresora 3D
En este caso está en un MAQUEEN no en un cutebot
También existe la versión CUTRE con gomas 😂

Fuente: El autor, pero como decía mi padre "De mis chapuzas te reirás pero de mis dineros no cobrarás"
AI LENS, MICROBIT, CUTEBOT Y MAKECODE
Para poder usar AI LENS con MAKECODE y MICROBIT entramos en un proyecto y en EXTENSIONES

Elegimos la extensión CUTEBOT para poder usar este robot

y VOLVEMOS A EXTENSIONES E INSTALAMOS LA DE AI LENS

Ya lo tenemos todo preparado :

Programas
Sigue Bola
El programa es sencillo:
- Instalar la extensión PlanetX AI
- Al empezar el programa, inicializa la cámara en modo sigue reconocer bola
- Si el tamaño de la bola es menor de 100 significa que la bola esta lejos
- Si la coordenada X es menor que 80 significa que esta a la izquierda, luego gira a la izquierda
- Si la coordenada X es mayor que 144 significa que esta a la derecha, luego gira a la derecha
- Si el tamaño de la bola es mayor de 100 significa que esta cerca luego para
No va muy preciso pero sigue la bola
Sigue líneas
SIGUE LÍNEAS
El programa es sencillo, inicializo la cámara en modo "tracking" y en el bucle del programa si va hacia la derecha, giro a la derecha, si ...
Como se puede ver, cuando tiene curvas cerradas se pierde, una solución es bajar la velocidad
Aunque los de Elecfreaks les sale muy bien:
Detección de color
DETECCIÓN DE COLOR
El programa es sencillo, inicializo la cámara en modo "tracking" y en el bucle del programa si va hacia la derecha, giro a la derecha, si ...
Podemos ver el resultado
Variante: Tocar una nota diferente según el color. Ver la idea en https://www.elecfreaks.com/learn-en/microbitplanetX/ai/Plant_X_EF05045_03.html
Señales de tráfico
En este programa podemos ver el potencial de esta cámara, es capaz de interpretar las siguientes señales de tráfico que incorpora la cámara en forma de tarjetas
Código
Fuente Modificado de https://www.elecfreaks.com/learn-en/microbitKit/smart_cutebot/cutebot%2BAI%20lens/cutebot_case17.html
Resultado
¿Qué esperas para mejorar el programa y añadir BACK
Aprendo imagen
Podemos usar la AI de la cámara para reconocer objetos pero antes tenemos que "enseñarle" para ello usaremos un botón, para que aprenda el objeto que tiene enfrente, puede aprender hasta 5 objetos diferentes:
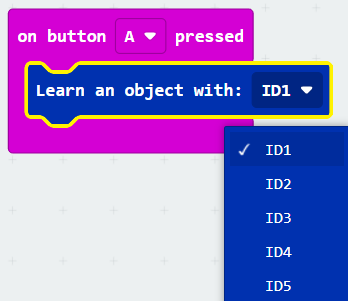
El código https://makecode.microbit.org/S92780-88372-65474-49727
Resultado
Apretamos a A para que aprenda una carta, y B para que aprenda otra
Y el resultado es:
Detecto cara
Una variedad del anterior programa es este que detecta la cara de una persona
Código:
https://makecode.microbit.org/S90567-74631-68997-90362
Resultado
Créditos
Autoría y licencias
Cualquier observación o detección de error en soporte.catedu.es
Los contenidos se distribuyen bajo licencia Creative Commons tipo BY-NC-SA excepto en los párrafos que se indique lo contrario.


