Introducción
- Objetivos y contenidos
- Pensamiento computacional
- Lenguajes de programación
- Muro
- mBlock5
- En VIVO o EN CARGA ¿Eso que es?
Objetivos y contenidos
CONTENIDOS
- CYBERPI
- Conocer Cyberpi, sonidos, leds, display, sensor movimientos, joystick, Lan e IoT
- mBOT2
- Conocer mBot2, sensor luz, evita obstáculos, sigue líneas, control remoto, etc..
- Programación Dos posibilidades de realizar el curso
- Programación gráfica en bloques mBlock adecuado para 3º ciclo primaria y ESO
- Programación en código Python adecuado para 4ESO y superior
OBJETIVOS
- Conocer las posibilidades didácticas del robot Cyberpi y de mBot2
- Trabajar en diferentes entornos de los actuadores y sensores que tienen estos robots.
- Desarrollar prácticas de comunicaciones en robótica
- Internet de las cosas (IoT)
- Conocer y desarrollar posibilidades avanzadas, como el uso de la Inteligencia Artificial
Pensamiento computacional
¿Dónde se encaja este robot? ¿Se puede comparar este robot con otros robots de otros cursos que hacemos desde CATEDU?
Esta es la hoja de ruta que proponemos, no se tiene que tomar al pie de la letra, pero intenta ayudar al profesorado que tenga una visión global de tanta oferta robótica:
Como se puede ver CYBERPI + MBOT2 tiene la ventaja de ser un robot de suelo con muchas posibilidades y para muchas etapas.
Guía orientativa
Tenemos un grupo Telegram Robótica Educativa en Aragón, https://t.me/roboticaeducativaaragon

Lenguajes de programación
mBot, mBot2 se puede programar
- Por bloques principalmente con mBlok
- Por código principalmente Python
Guía de los lenguajes de programación para robots
Tenemos un grupo Telegram Robótica Educativa en Aragón, https://t.me/roboticaeducativaaragon
Muro
https://padlet.com/CATEDU/mbot2
mBlock5
mBlock es un programa especializado en el manejo de los robots de Makeblock (ver cursos de mBot en Aularagon), pero permiten muchas arquitecturas de placas pues los mismos robots de Makeblock estan basados en placas de hardware libre Arduino, ESP32...

Hay dos versiones, online y offline, las dos son buenas, no obstante
- Si tienes Windows o Mac preferimos la versión offline para no saturar la red en los centros, rapidez y comodidad.
- Si utilizas Linux o Chromebook tienes que usar la versión online obligatoriamente pues no hay versión instalable.
Tanto una opción como la otra, permite tener los proyectos en la nube de Makeblock, compartir, embeberlos, etc...
Versión online
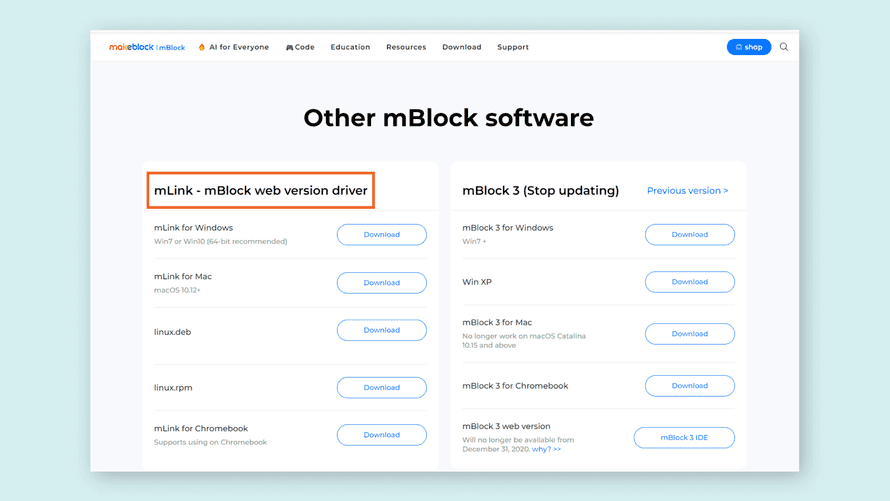
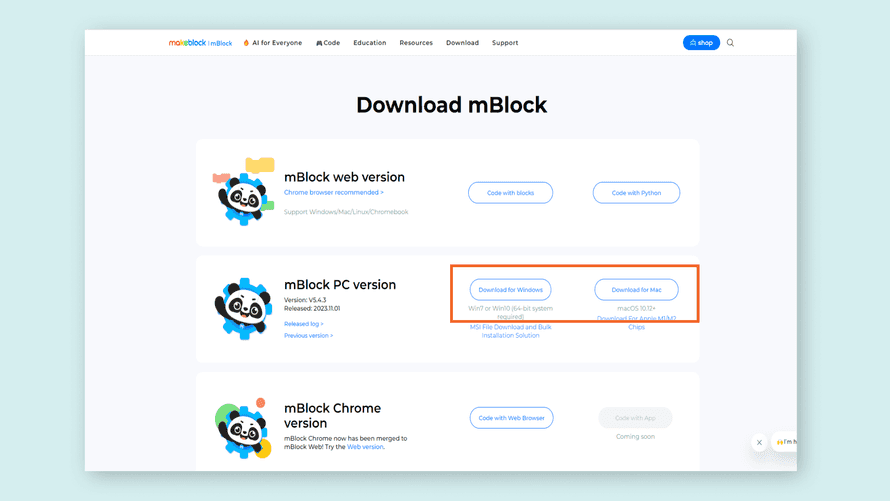
Para la versión web primero hay que instalar mLink driver nos vamos a https://mblock.cc/pages/downloads y abajo nos encontramos mLink para descargar, descarga el mLink correspondiente a tu sistema operativo :
Licencia CC-BY -SA https://docs.arduino.cc/tutorials/alvik/getting-started-mblock/
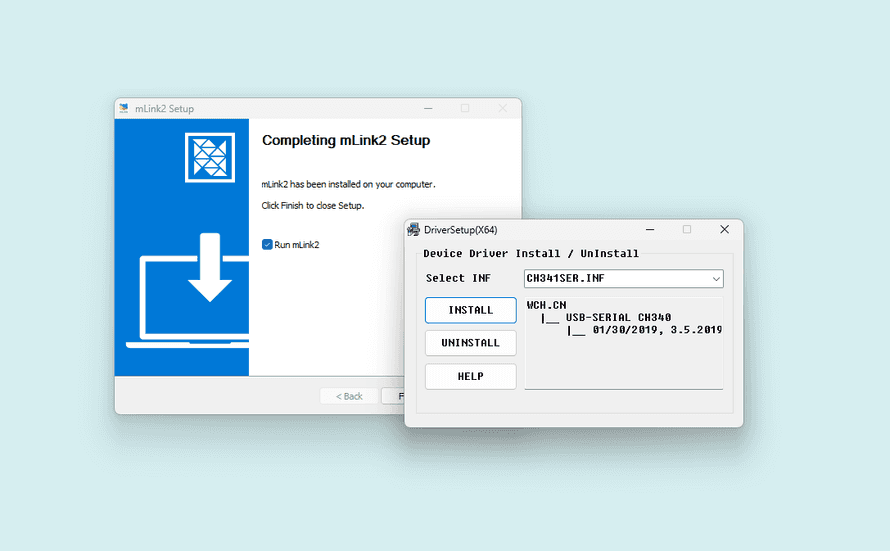
Lo instalamos, y entonces pedirá instalar los drivers que son pequeños programas que comunican el PC con el harware del robot
Licencia CC-BY -SA https://docs.arduino.cc/tutorials/alvik/getting-started-mblock/
Si utilizas Chromebook lee la siguiente guía para conectar el robot
Una vez instalado ya podemos entrar en la web https://ide.mblock.cc/ para programar en bloques nuestro robot
Nota: La página https://ide.mblock.cc/ no suele estar bien situada en los buscadores si ponemos mBlock, la página que suele salir es esta https://www.mblock.cc/en/ y nos da dos opciones, trabajar con bloque, o con Python, elegimos bloques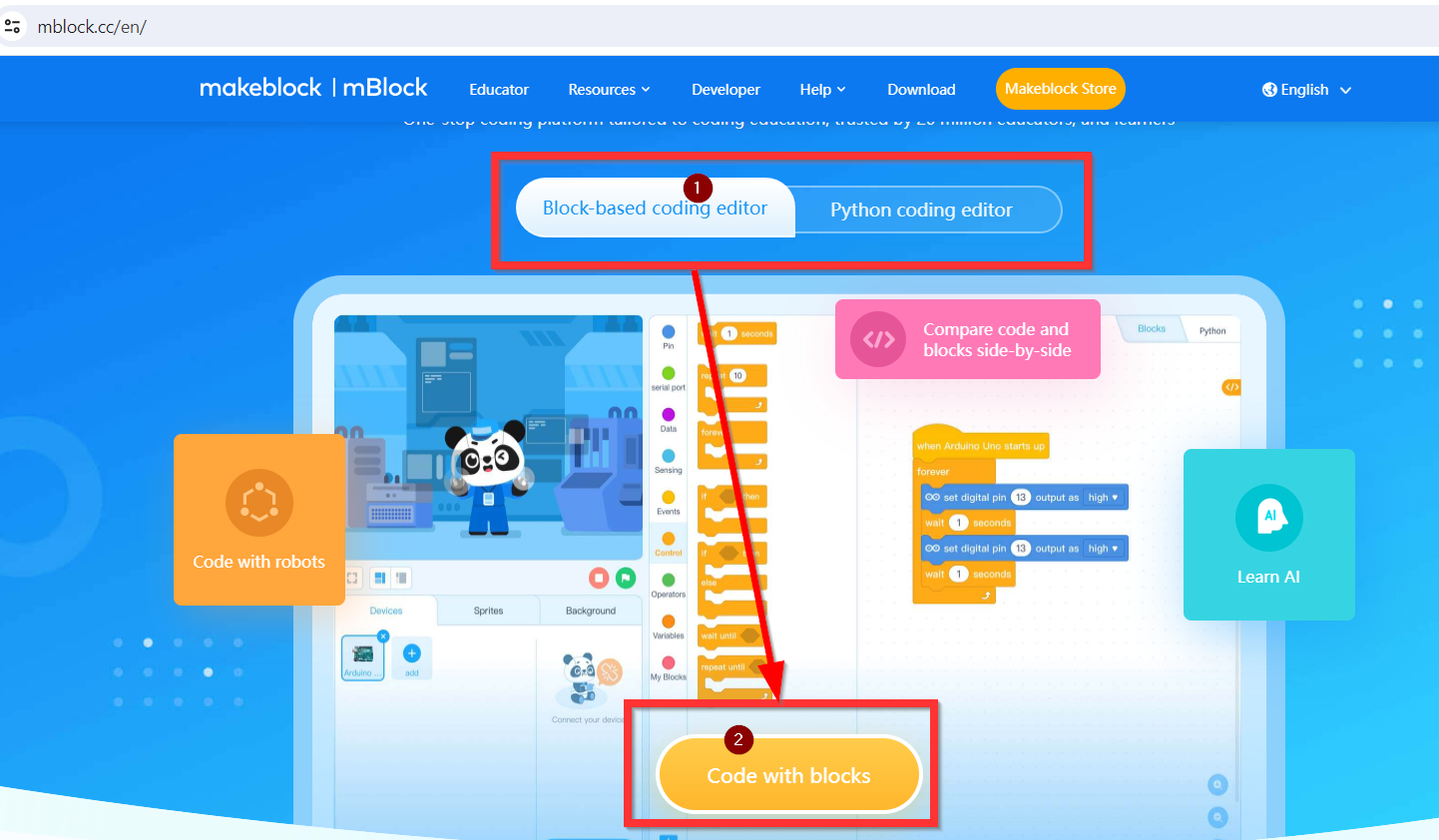
Si has entrado sin querer en la URL https://ide.makeblock.com/ no permite el logueo en Europa
En resumen, la URL correcta es https://ide.mblock.cc/
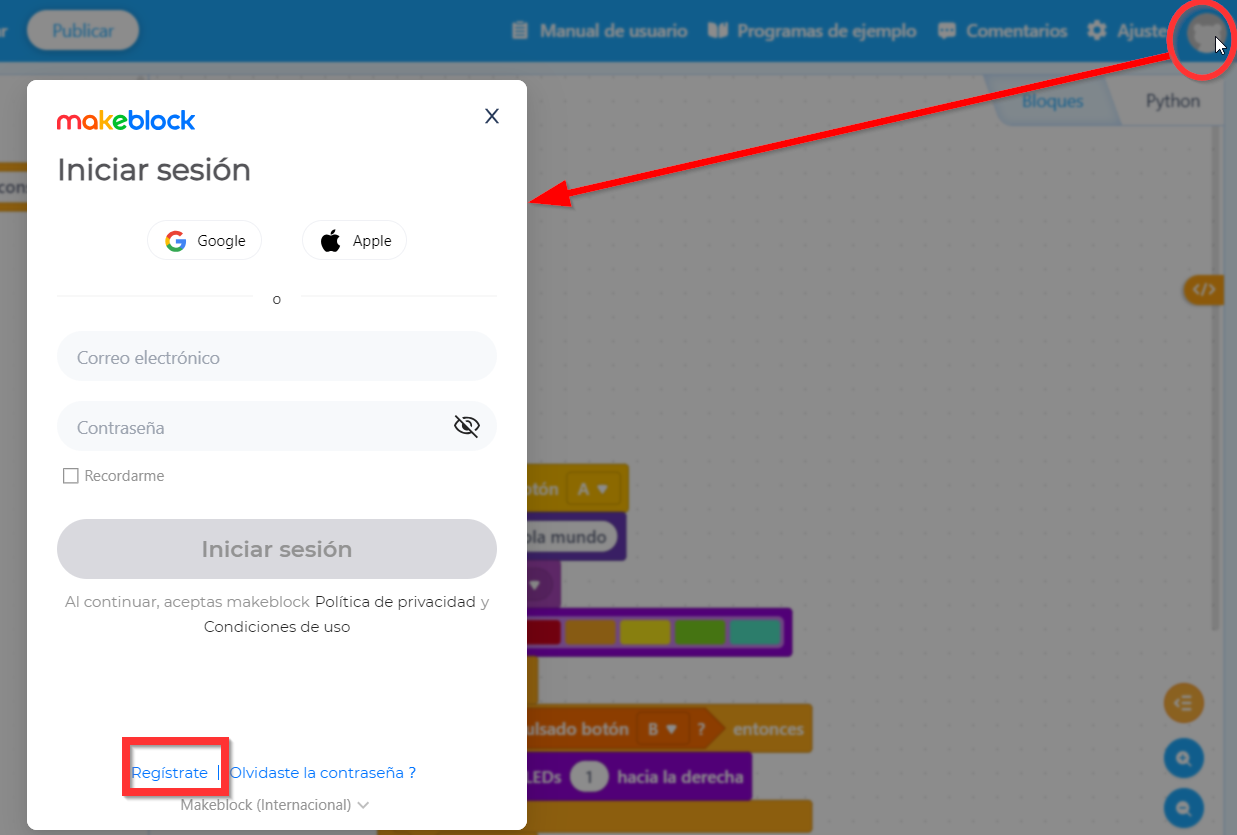
En este editor tenemos que loguearnos podemos crear un nuevo usuario, utilizando una cuenta de Google/Apple o registrarnos con un correo electrónico
Versión offline Windows o Mac
Vamos a https://mblock.cc/pages/downloads y descargamos la versión correcta a nuestro sistema operativo.
Licencia CC-BY -SA https://docs.arduino.cc/tutorials/alvik/getting-started-mblock/
En windows hacemos doble click en el archivo ejecutable descargado
Licencia CC-BY -SA https://docs.arduino.cc/tutorials/alvik/getting-started-mblock/
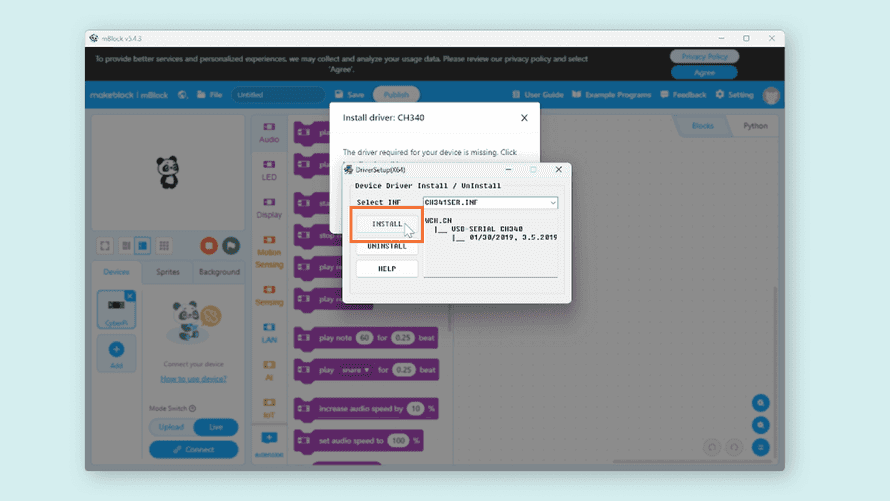
Lo instalamos, y entonces pedirá instalar los drivers que son pequeños programas que comunican el PC con el hardware del robot
Licencia CC-BY -SA https://docs.arduino.cc/tutorials/alvik/getting-started-mblock/
Algunas veces la ventana de driver de la figura anterior esta escondida en el fondo, hay que minimizar ventanas para acceder a ella.
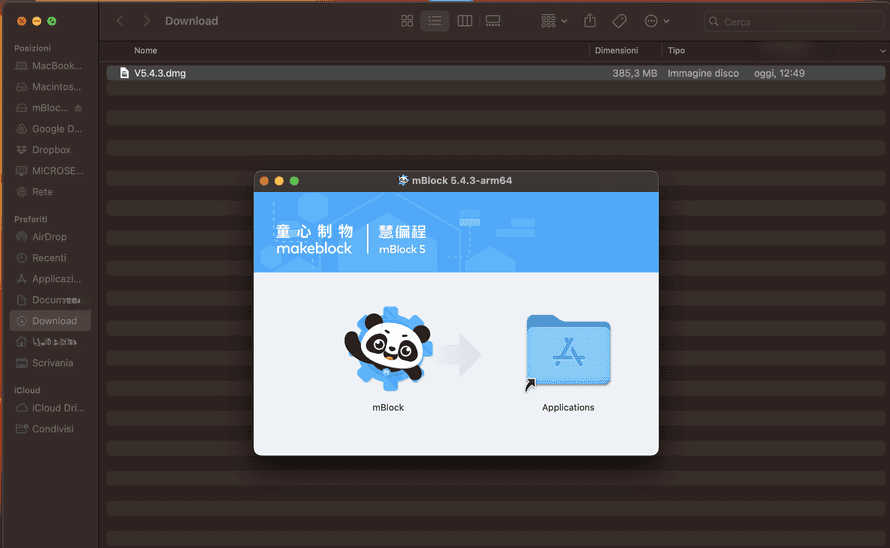
En MAC el archivo será un fichero mount con la extensión .dmg, por lo tanto hay que arrastar el icono a la carpeta de aplicaciones
Licencia CC-BY -SA https://docs.arduino.cc/tutorials/alvik/getting-started-mblock/
En VIVO o EN CARGA ¿Eso que es?
DOS FORMAS DE PROGRAMAR EN MBLOCK
Como vemos, mBlock permite dos formas de programar :
OPCIÓN Programación en vivo
El programa reside en el ordenador, y en la placa hay instalado un Firmware para ir escuchando y ejecutando lo que manda el ordenador.
- VENTAJAS
- Te permite interactuar el robot y el ordenador, por ejemplo podemos hacer que cuando el detector de humedad detecte agua, que salga por pantalla un fondo acuático, o que pulsando una tecla del teclado se encienda un LED en la placa...
- DESVENTAJAS
- hay que cargar dentro del robot el Firmware exclusivo de mBlock para que Arduino haga caso a mBlock
- Hay que tener nuestro ordenador como intermediario, se come los recursos y puede que nuestro programa vaya lento
- Por supuesto necesita tener ordenador conectado al robot, o sea, trabaja como un esclavo del ordenador.
OPCIÓN Programación cargar a la placa
Todos los programas editores de Arduino (tanto los que programan con código como el Arduino IDE) como los editores de programas gráficos en bloque (mBlock, Snap4Arduino, Arduinoblocks, ...) permiten cargar el programa en la placa. Las ventajas y desventajas son las opuestas de trabajar en vivo.
EN VIVO ¿Qué es eso?
Existe una posibilidad de utilizar la placa "en vivo" frente a "cargar" el programa en la placa.
Es decir, interactuando con el ordenador. El programa está en el PC. En la placa hay un firmware que le dice que este a las órdenes del PC. De esta manera podemos por ejemplo:
- Enviar órdenes desde el ordenador a la placa.
Por ejemplo que al pulsar la tecla espacio que se encienda el led D13
- Enviar información desde la placa al ordenador
Por ejemplo que muestre por pantalla nos muestre la cantidad de luz, que registra el sensor LDR, etc...
Que nosotros sepamos, estos programas permiten la programación en vivo :
- mBlock placas: Arduino, Microbit, Raspberry Pi, ... robots de Makeblock: mBot, Cyberpi...
-EchidnaScratch CURSO DE ECHIDNA
-Microblocks
VENTAJAS LA PROGRAMACIÓN EN VIVO PERMITE MUCHO JUEGO Y POSIBILIDADES A LA HORA DE ELABORAR PROYECTOS
INCONVENIENTES: Necesitas el ordenador encendido y conectado al robot.