El contenido a partir de aquí es de esta página es de {{@12107#bkmrk-pere-manel-verdugo-z}}
Vamos a realizar este programa, primero una pantalla de bienvenida: [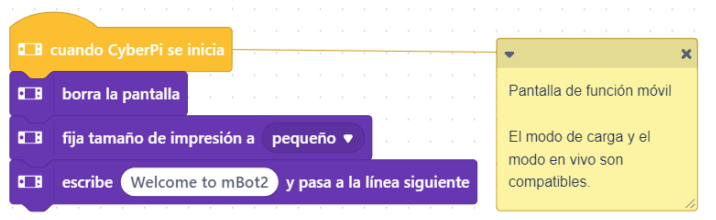](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-13-25-capitulo-1-mbot-demostracion-de-movimiento-pdf.png) {{@12107#bkmrk-pere-manel-verdugo-z}} Luego interactuamos con el joystick y el movimiento: [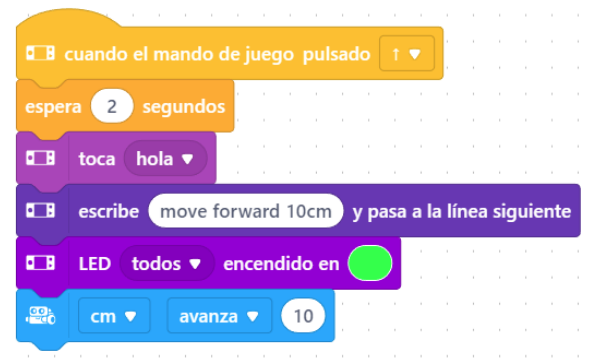](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-14-34-capitulo-1-mbot-demostracion-de-movimiento-pdf.png) {{@12107#bkmrk-pere-manel-verdugo-z}} [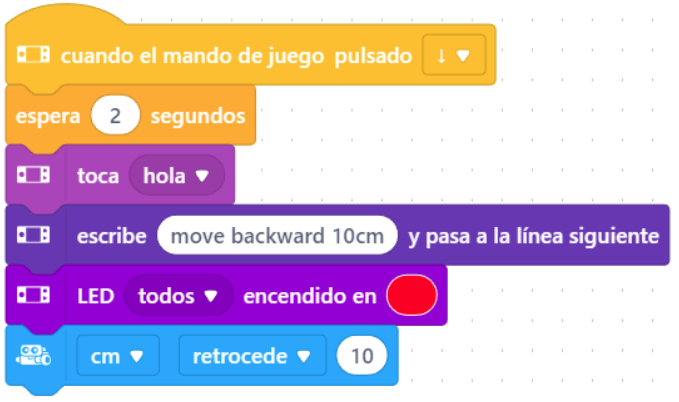](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-15-18-capitulo-1-mbot-demostracion-de-movimiento-pdf.png) {{@12107#bkmrk-pere-manel-verdugo-z}} [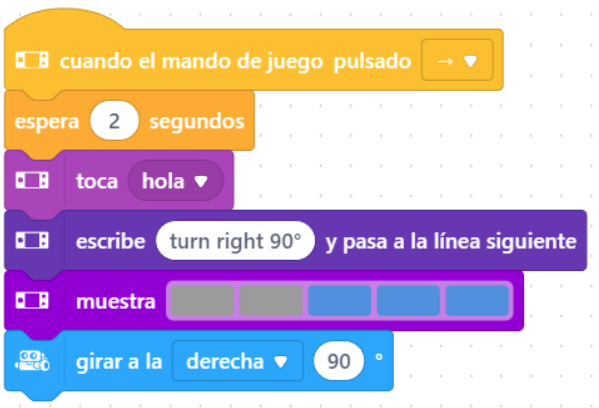](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-15-45-capitulo-1-mbot-demostracion-de-movimiento-pdf.png) {{@12107#bkmrk-pere-manel-verdugo-z}} [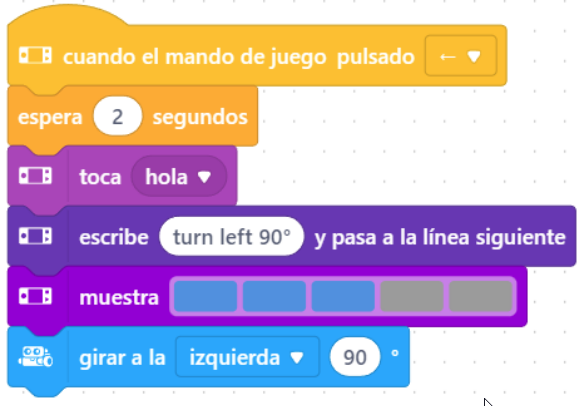](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-16-04-capitulo-1-mbot-demostracion-de-movimiento-pdf.png) {{@12107#bkmrk-pere-manel-verdugo-z}} Cargamos estos programas **EN MODO CARGA** ##### **RESULTADO** ****El contenido de esta página es de {{@12107#bkmrk-pere-manel-verdugo-z}}
# Jugando con la luz ##### **mBot2 se quiere ir de marcha nocturna** Podemos hacer que el mBot2 se vaya de marcha nocturna Un programa muy muy sencillo es este **hay que jugar con los valores de 20 y 50 según las condiciones de tu aula** [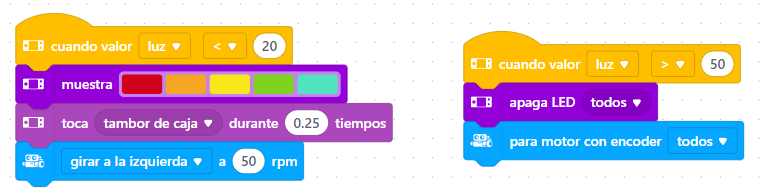](https://libros.catedu.es/uploads/images/gallery/2025-04/2025-04-07-12-01-56-mblock-v5-4-3.png) Es muy espectacular hacerlo con los alumnos, se deja el aula a oscuras, se encienden todas las luces y todo baila ! [](https://www.pscp.tv/w/1YqJDLrpOPOJV)No te quedes con sólo girar, hazle piruetas, juegos de luces etc...
##### **Robot polilla** Podemos hacer este sencillo programa que avanza si hay luz, o va dando vueltas (lo busca) si no hay [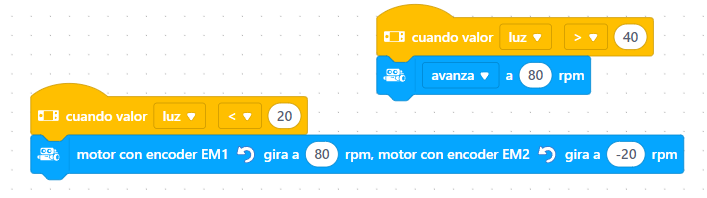](https://libros.catedu.es/uploads/images/gallery/2025-04/2025-04-07-12-14-26-mblock-v5-4-3.png)Puedes alterar el programa de tal manera que si no hay luz, que haga giros más largos, retroceda...
# Evitar obstáculos I ##### **Mi primer "Evita obstáculos"** Sugerimos un programa sencillo [https://planet.mblock.cc/project/7548708](https://planet.mblock.cc/project/7548708) [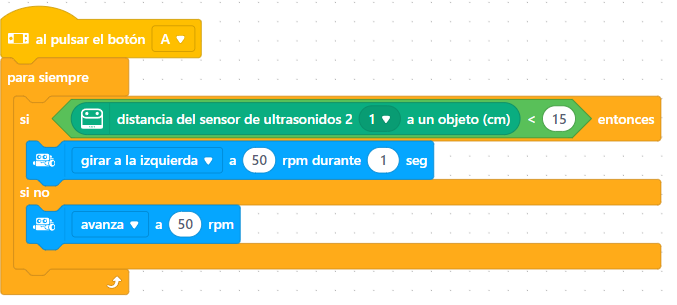](https://libros.catedu.es/uploads/images/gallery/2025-04/2025-04-07-11-53-00-mblock-v5-4-3.png) Como puedes ver, cuando hay un obstáculo a menos de 15cm (puedes modificar este número) retrocede un poco, gira y así evita el obstáculo. Si no hay objeto, pues avanza ##### **El Evita obstáculos de programas de ejemplo**Acuérdate que para manejar el sensor de distancia, hay que instalar la extensión correspondiente. Ver [https://libros.catedu.es/books/cyberpi-y-mbot2/page/como-usar-mbot2-en-mblock](https://libros.catedu.es/books/cyberpi-y-mbot2/page/como-usar-mbot2-en-mblock)
El script que proponemos es el que se encuentra en "Programas de ejemplo ": [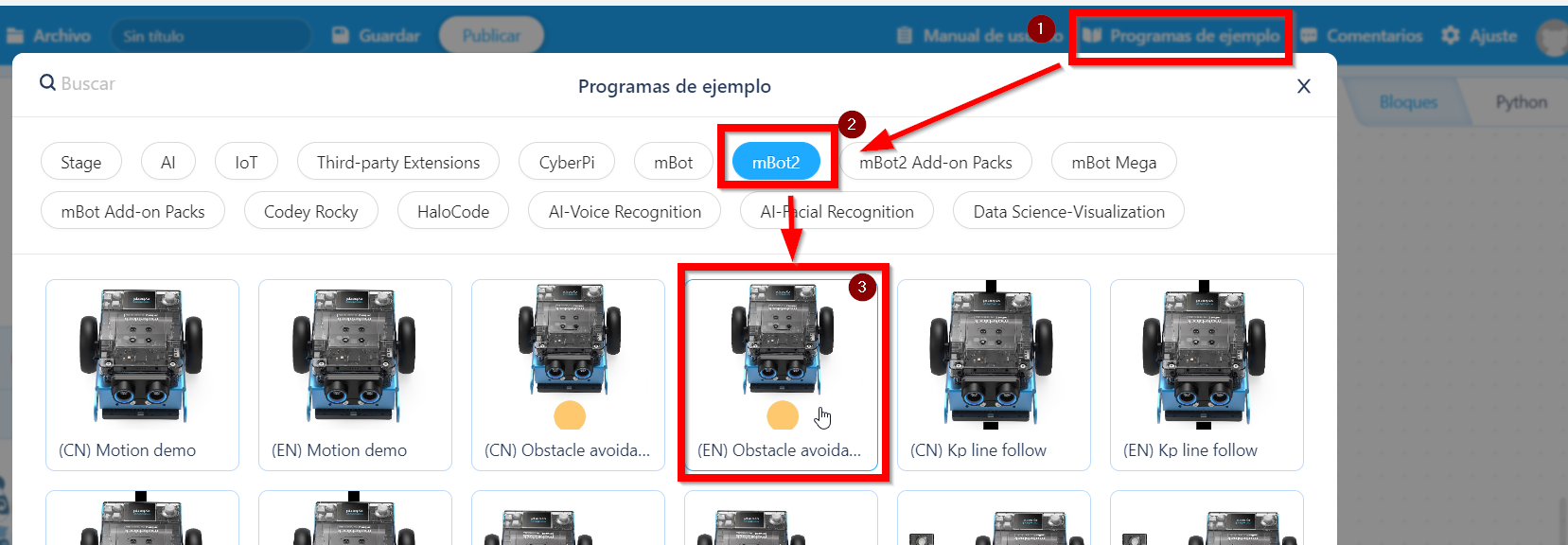](https://libros.catedu.es/uploads/images/gallery/2025-04/2025-04-01-20-45-43-mblock-v5-4-3.png)El contenido a partir de aquí es de {{@12107#bkmrk-pere-manel-verdugo-z}}
[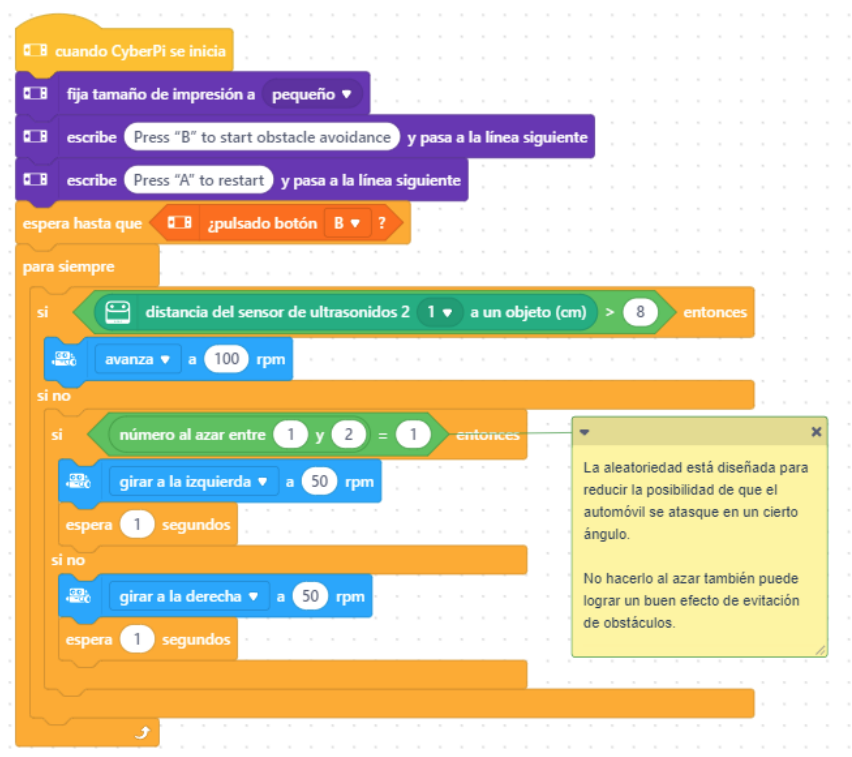](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-24-10-capitulo-2-evitar-obstaculos-con-mbot2-pdf.png) [{{@12107#bkmrk-pere-manel-verdugo-z}}](https://www.youtube.com/watch?v=Nx1mIV6vddk) La distancia de 8cm es arbitraria y también la elección de hacerlo al azar o no. Podemos añadir [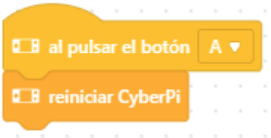](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-26-31-capitulo-2-evitar-obstaculos-con-mbot2-pdf.png) {{@12107#bkmrk-pere-manel-verdugo-z}} ##### **RESULTADO**El contenido de esta página es de {{@12107#bkmrk-pere-manel-verdugo-z}}
# Evitar obstáculos IIEl contenido de esta página es de {{@12107#bkmrk-pere-manel-verdugo-z}}
Acuérdate que para manejar el sensor de distancia, hay que instalar la extensión correspondiente. Ver [https://libros.catedu.es/books/cyberpi-y-mbot2/page/como-usar-mbot2-en-mblock](https://libros.catedu.es/books/cyberpi-y-mbot2/page/como-usar-mbot2-en-mblock)
Ahora, en vez de elegir al azar como Evitar obstáculos I qué dirección a girar, en este caso vamos a realizar un proyecto en el cual nuestro mBot2 tiene que detectar un objeto cuando esté a menos de 10 cm. En este momento se tiene que para y comprobar la distancia que hay a su derecha y la distancia que hay a su izquierda, siempre tendrá que ir por la dirección donde el obstáculo está más lejos. [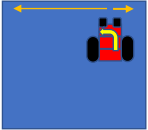](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-47-52-detectar-obstaculos-y-girar-donde-la-distancia-a-un-objeto-sea-mayor-pdf.png) {{@12107#bkmrk-pere-manel-verdugo-z}}
[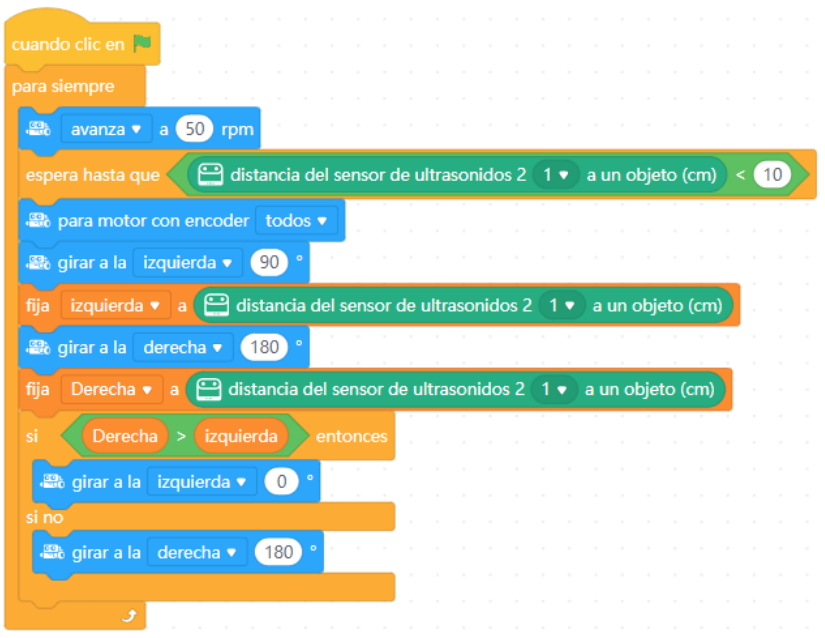](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-48-48-detectar-obstaculos-y-girar-donde-la-distancia-a-un-objeto-sea-mayor-pdf.png) {{@12107#bkmrk-pere-manel-verdugo-z}} ##### **RESULTADO** # Sigue líneas I ##### **Mi primer siguelíneas** El sigue líneas más sencillo es este, recomendamos empezar por aquí [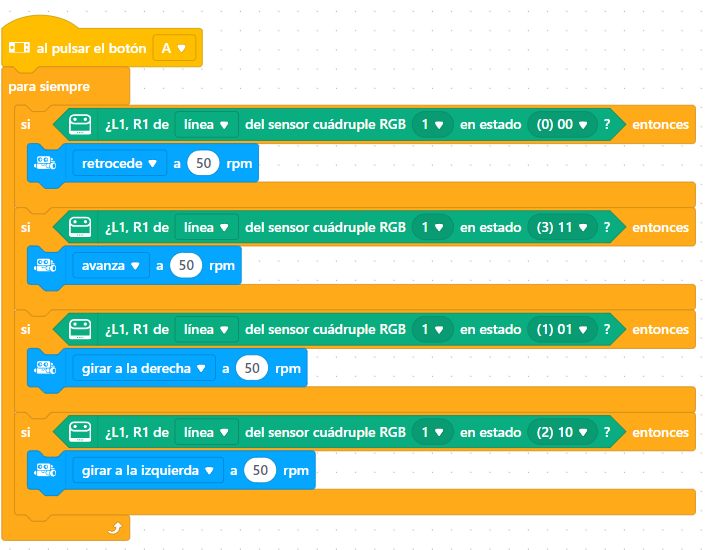](https://libros.catedu.es/uploads/images/gallery/2025-04/2025-04-07-11-36-55-mblock-v5-4-3.png) - Si detecto 00 es decir "he perdido la línea" entonces ves hacia atrás para recuperarla - Si detecto 11 es que estoy "en la línea" pues "pa'lante" - Si detecto 01 es que la línea la tengo a mi derecha (0 en la izquierda 1 en la derecha) por lo tanto gira a la derecha para volver al redil - lo mismo pero a la izquierda Como se puede ver, hace movimientos hacia atrás sobre todo en las curvas cerradas pero **¡¡no se escapa!!** ##### **El sígue líneas de "Programas de ejemplo"**Acuérdate que para manejar el sensor de distancia, hay que instalar la extensión correspondiente. Ver [https://libros.catedu.es/books/cyberpi-y-mbot2/page/como-usar-mbot2-en-mblock](https://libros.catedu.es/books/cyberpi-y-mbot2/page/como-usar-mbot2-en-mblock)
El programa lo puedes encontrar en los "Programas de ejemplo": [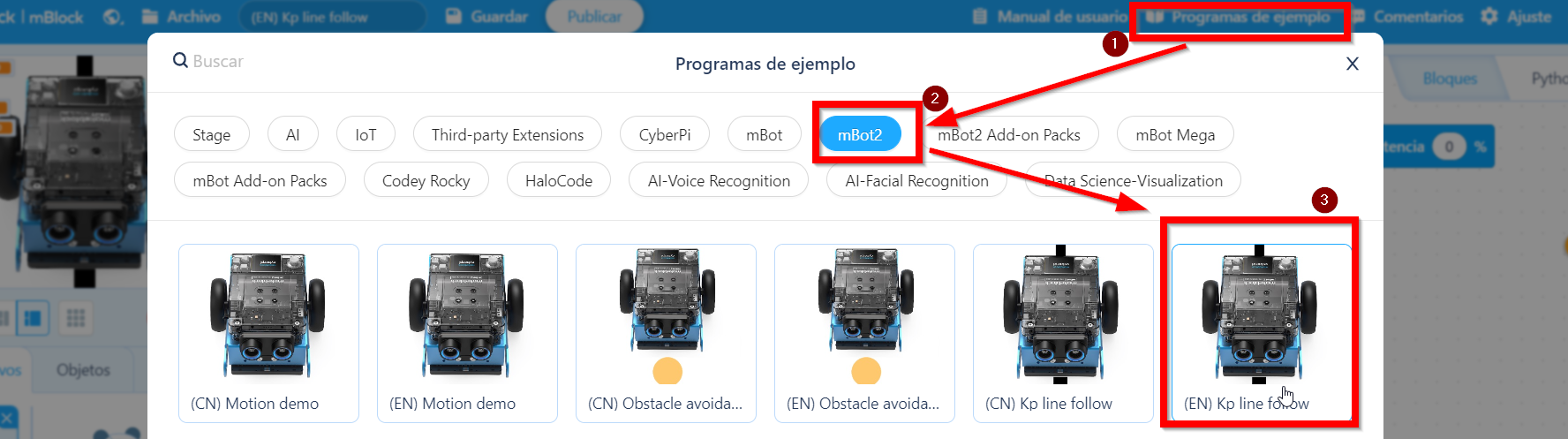](https://libros.catedu.es/uploads/images/gallery/2025-04/2025-04-01-20-48-42-mblock-v5-4-3.png)El contenido a partir de aquí es esta página es de {{@12107#bkmrk-pere-manel-verdugo-z}}
El primer script es para parar el robot con el botón A [](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-31-08-seguir-linea-con-mbot2-pdf.png) {{@12107#bkmrk-pere-manel-verdugo-z}} [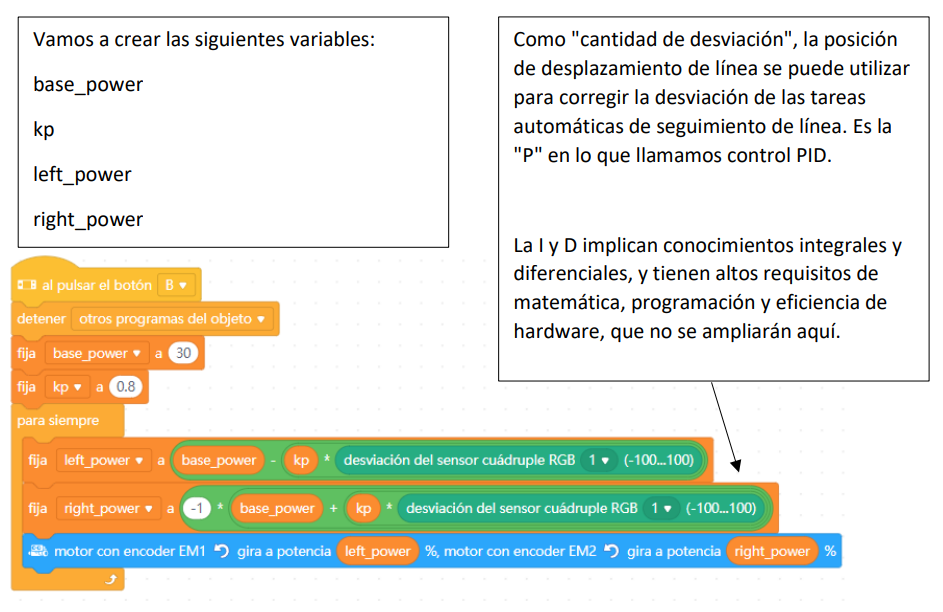](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-33-00-seguir-linea-con-mbot2-pdf.png) {{@12107#bkmrk-pere-manel-verdugo-z}} (optativo) Esta función para que nos muestre el color de la línea [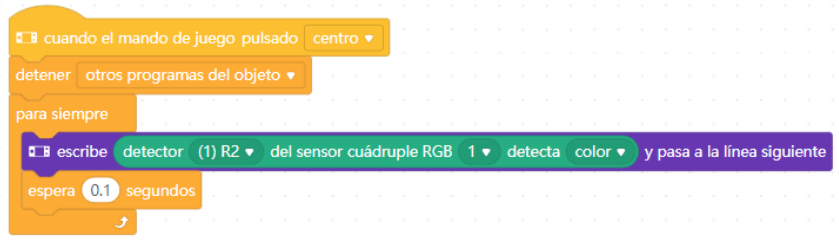](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-34-55-seguir-linea-con-mbot2-pdf.png) ##### **RESULTADO** # Sigue líneas IIEl contenido de esta página es de {{@12107#bkmrk-pere-manel-verdugo-z}}
Acuérdate que para manejar el sensor de distancia, hay que instalar la extensión correspondiente. Ver [https://libros.catedu.es/books/cyberpi-y-mbot2/page/como-usar-mbot2-en-mblock](https://libros.catedu.es/books/cyberpi-y-mbot2/page/como-usar-mbot2-en-mblock)
En este programa sigue líneas avanzado vamos a incorporar que nos vaya diciendo los colores que va detectando
El script que proponemos es el siguiente : [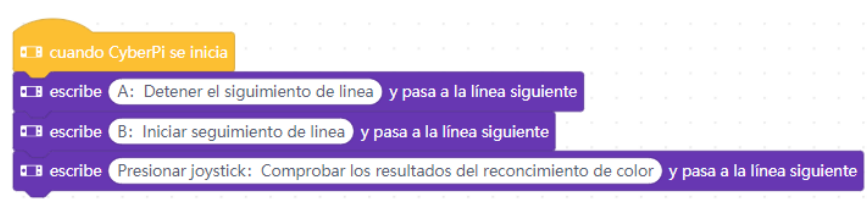](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-38-44-seguir-la-linea-de-color-con-mbot2-pdf.png) {{@12107#bkmrk-pere-manel-verdugo-z}} [](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-39-05-seguir-la-linea-de-color-con-mbot2-pdf.png) {{@12107#bkmrk-pere-manel-verdugo-z}} Y el algoritmo principal - Cuando se presiona el botón B - Detener otros programas del objeto. - A la variable base\_power le asignamos el valor 55 - A la variable kp le asignamos el valor 0.8 - Para siempre (Bucle infinito) - A la variable left\_power le asignamos el valor -1 \* ( base\_power + (kp \* desviación del sensor cuádruple RGB) - A la variable right\_power le asignamos el valor(base\_power – (kp \* desviación del sensor cuádruple RGB) - moto EM1 gira a potencia right\_power %, motor EM2 gira potencia left\_power % - sí detector R1 del sensor cuádruple RGB detecta blanco entonces - muestra 5 leds color blanco - sí detector R1 del sensor cuádruple RGB detecta rojo entonces - muestra 5 leds color rojo - sí detector R1 del sensor cuádruple RGB detecta amarillo entonces - muestra 5 leds color amarillo - sí detector R1 del sensor cuádruple RGB detecta verde entonces - muestra 5 leds color verde - sí detector R1 del sensor cuádruple RGB detecta cian entonces - muestra 5 leds color cian - sí detector R1 del sensor cuádruple RGB detecta azul entonces - muestra 5 leds color azul - sí detector R1 del sensor cuádruple RGB detecta morado entonces - muestra 5 leds color morado - sí detector R1 del sensor cuádruple RGB detecta negro entonces - muestra 5 leds color negro [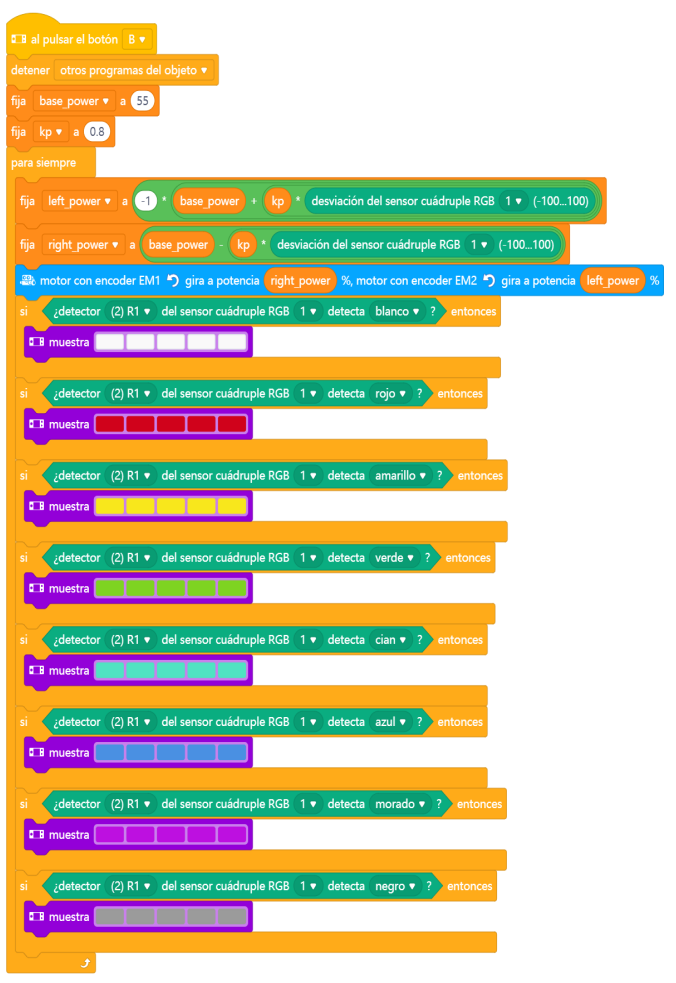](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-39-48-seguir-la-linea-de-color-con-mbot2-pdf.png) {{@12107#bkmrk-pere-manel-verdugo-z}} Y además (optativo) igual que el sigue líneas I : [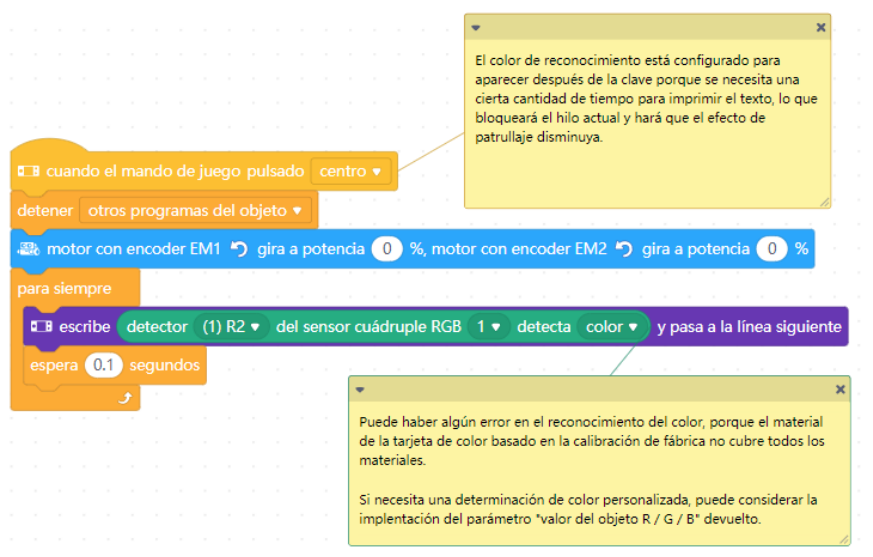](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-43-45-seguir-la-linea-de-color-con-mbot2-pdf.png) {{@12107#bkmrk-pere-manel-verdugo-z}} ##### **RESULTADO** # Control remotoEl contenido de esta página es de {{@12107#bkmrk-ejemplos-mbot2-pere-}}
PARA REALIZAR ESTE PROGRAMA SE NECESITAN DOS CYBERPIS QUE VAN A ESTAR CONECTADOS EN LA MISMA LAN
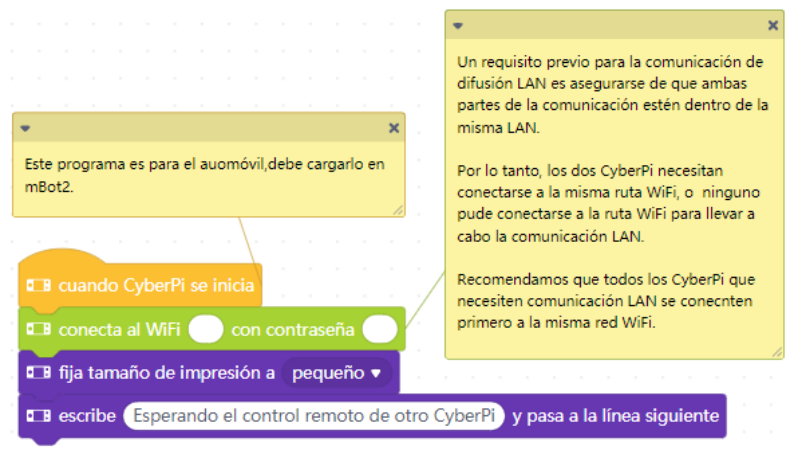
Ahora un Cyberpi con su joystick controlará los movimientos del otro Cyberpi montado en su mBot2 [](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-52-26-control-remoto-pdf.png) {{@12107#bkmrk-ejemplos-mbot2-pere-}}
Para este proyecto hemos de cargar dos CyberPy. [](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-53-02-control-remoto-pdf.png) ##### **CODIGO EN EL CYBERPI RECEPTOR MONTADO CON MBOT2** [**https://planet.mblock.cc/project/projectshare/7552114**](https://planet.mblock.cc/project/7552114)Hay que poner los dos Cyberpis en la misma Wifi (SSID y contraseña)
[](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-53-25-control-remoto-pdf.png) {{@12107#bkmrk-ejemplos-mbot2-pere-}} [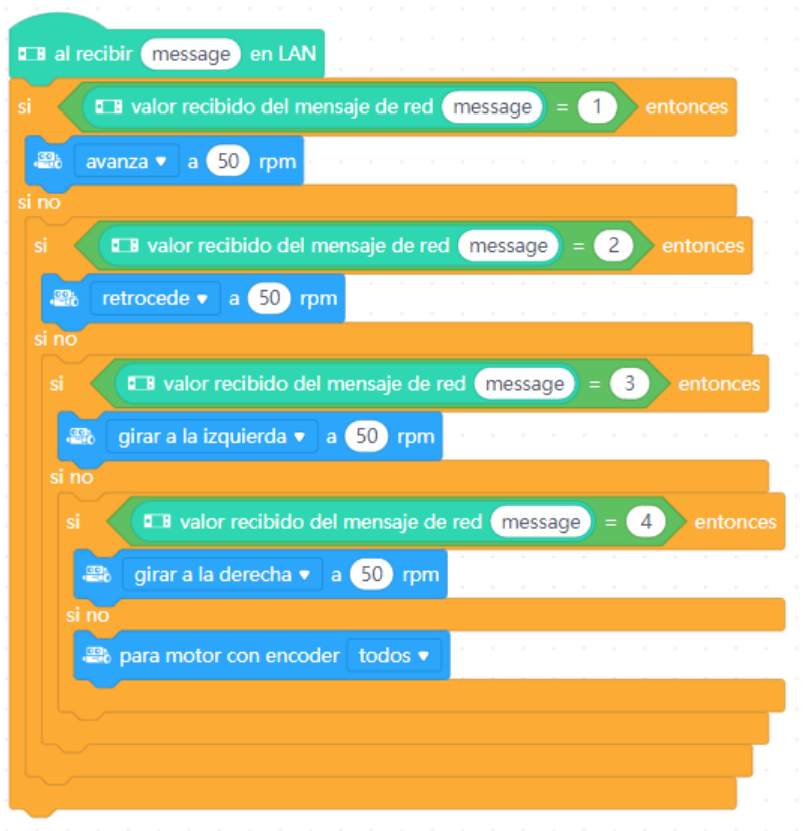](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-55-55-control-remoto-pdf.png) {{@12107#bkmrk-ejemplos-mbot2-pere-}} ##### **CODIGO EN EL CYBERPI QUE HARÁ DE CONTROL REMOTO** [**https://planet.mblock.cc/project/7552213**](https://planet.mblock.cc/project/7552213) **[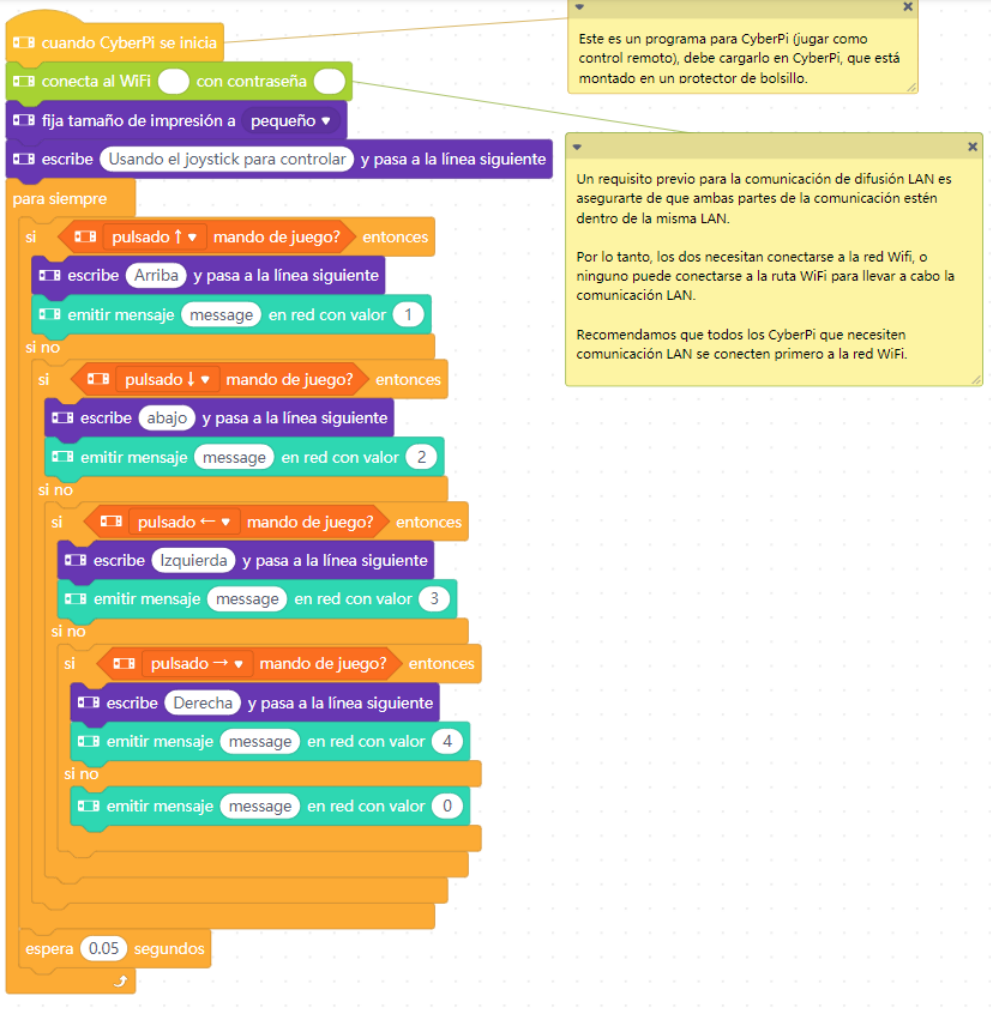](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-56-57-control-remoto-pdf.png)** {{@12107#bkmrk-ejemplos-mbot2-pere-}} ##### **RESULTADO** ****El contenido de esta página es de {{@12107#bkmrk-pere-manel-verdugo-z}}
# Más actividades ##### **RETOS : HACER UN PROGRAMA QUE REALICE....** **RETO1 APARCAR** [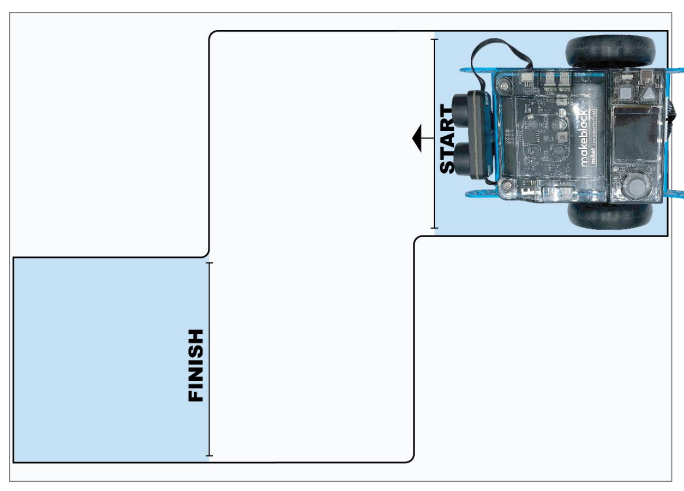](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-47-29-mbot2-actividades-pdf.png) SOLUCIÓN pag 18 de {{@12107#bkmrk-manual-mbot2-https%3A%2F}} **RETO 2 HACER UN CUADRADO** Los cuadrados naranjas son obstáculos.[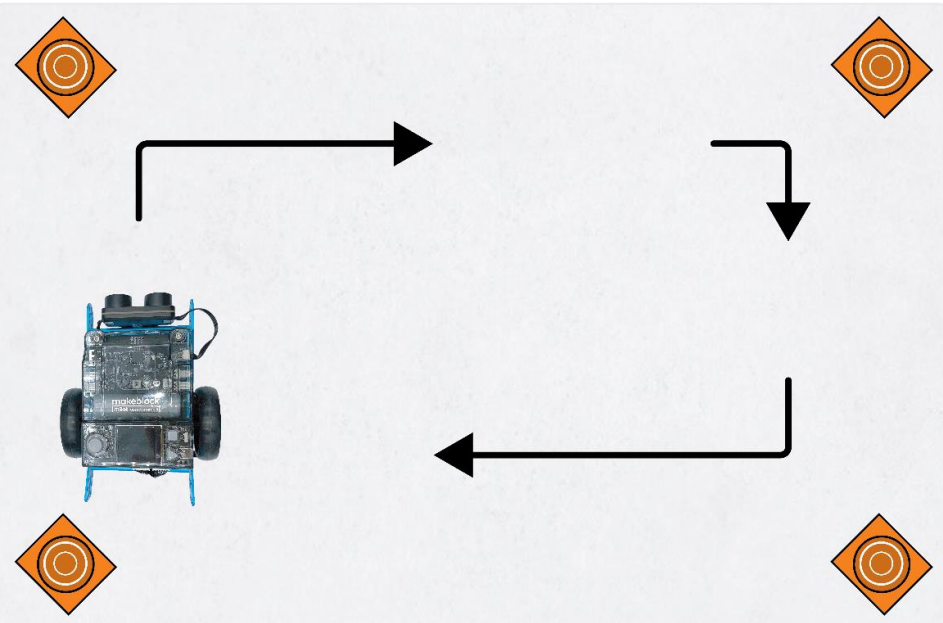](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-13-04-10-mbot2-actividades-pdf.png) Solución en pag 53 de {{@12107#bkmrk-manual-mbot2-https%3A%2F}} **RETO 3 BUSCANDO EL COLOR AZUL ...** Un grupo de mBot2 buscan el color azul pintado en el suelo. Si uno lo encuentra, informará a los demás y ganará el juego. Solución en pag 90 de {{@12107#bkmrk-manual-mbot2-https%3A%2F}} **RETO 4 BUSCANDO EL COLOR AZUL... PERO EN SOLITARIO** Hacer el juego anterior pero **sólo teniendo un mbot2** Solución en pag 9 de {{@12107#bkmrk-manual-mbot2-https%3A%2F}} Es parecido a la solución con Broadcast que vimos en [LAN con cyberpi](https://libros.catedu.es/books/cyberpi-y-mbot2/page/lan) **RETO 5 EL NO VA MÁS ... UN CAMARERO**