Previamente tienes que tener el programa **mBlock** instalado y cargado el dispositivo **mBot2** (aunque para estos ejemplos con Cyberpi también vale) , recuerda lo visto en [https://libros.catedu.es/books/cyberpi-y-mbot2/page/mblock5](https://libros.catedu.es/books/cyberpi-y-mbot2/page/mblock5) y en [https://libros.catedu.es/books/cyberpi-y-mbot2/page/como-usar-mbot2-en-mblock](https://libros.catedu.es/books/cyberpi-y-mbot2/page/como-usar-mbot2-en-mblock)
1. Entramos en mblock con el dispositivo cargado mBot2 y vamos a la pesaña Python 2. Pegamos el programa 3. Vamos a conectar mBot2 (debemos de tenerlo conectado con un cable USB tal y como vimos en [https://libros.catedu.es/books/cyberpi-y-mbot2/page/mi-primer-programa-hola-mundo](https://libros.catedu.es/books/cyberpi-y-mbot2/page/mi-primer-programa-hola-mundo) 4. Damos a la opción Cargar 5. Subir código [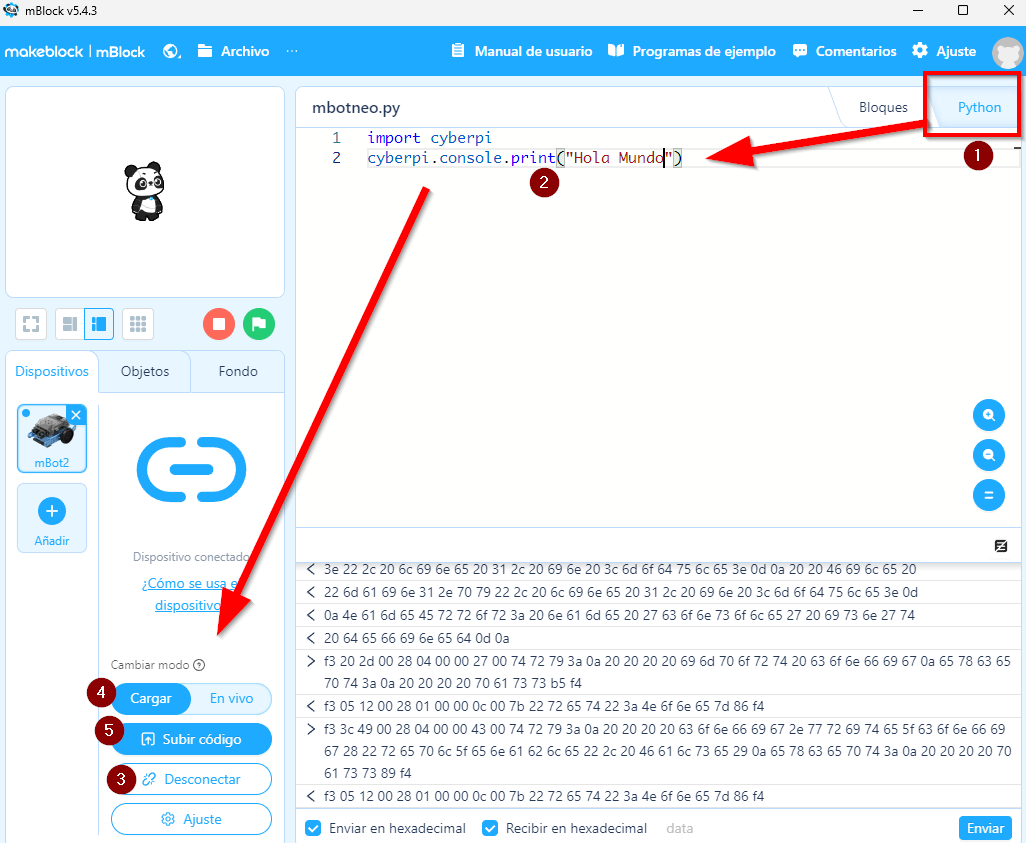](https://libros.catedu.es/uploads/images/gallery/2025-04/2025-04-29-12-46-26-mblock-v5-4-3.png) Y el resultado es [](https://libros.catedu.es/uploads/images/gallery/2025-04/2025-04-29-12-50-34-whatsapp.png) ##### **Mi primer programa Hola Mundo (método omitiendo)** Repite los pasos anteriores pero con este código ```python from cyberpi import * console.print("Hola Mundo") ```¿Ves la diferencia de código?
# Audio ##### **Un tono** Un programa sencillo de dar un tono puede ser el siguiente ``` import cyberpi cyberpi.audio.set_vol(100) cyberpi.audio.play_tone(700,1) ``` *Extraído de [https://github.com/PerfecXX/Python-mBot2/blob/main/README.md](https://github.com/PerfecXX/Python-mBot2/blob/main/README.md) licencia [MIT](https://github.com/PerfecXX/Python-mBot2/blob/main/LICENSE)* ##### **Instrumentos** También podemos reproducir instrumentos ``` import cyberpi cyberpi.audio.set_vol(100) # str type eg. snare,bass-drum,side-stick,crash-cymbal,open-hi-hat,close-hi-hat,tambourine,hand-clap,claves # float beat > 0 (second) cyberpi.audio.play_drum("snare",1) cyberpi.audio.play_drum("snare",1) cyberpi.audio.play_drum("side-stick",1) cyberpi.audio.play_drum("tambourine",1) ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} ##### **Efectos sonoros** También este código nos selecciona varios efectos sonoros y los reproduce ```python import cyberpi sound_effect = ["hello","hi","bye","yeah","wow","laugh","hum","sad","sigh","annoyed","angry","surprised","yummy","curious","embarrassed","ready","sprint","sleepy","meow","start","switch","beeps","buzzing","explosion","jump","laser","level-up","low-energy","prompt-tone","right","wrong","ring","score","wake","warning","metal-clash","shot","glass-clink","inflator","running water","clockwork","click","current","switch","wood-hit","iron","drop","bubble","wave","magic","spitfire","heartbeat","load"] cyberpi.display.show_label('UP :GO UP\nDOWN:GO DOWN\nMID :PLAY EFFECT', 16, 0, 0, 0) cyberpi.display.show_label('SELECT:\nName:', 16, 0, 60, 1) selected = 0 min_effect = 0 max_effect = len(sound_effect) - 1 while True: if cyberpi.controller.is_press('up'): if selected < max_effect: selected += 1 else: selected = min_effect elif cyberpi.controller.is_press('down'): if selected > min_effect: selected -= 1 else: selected = max_effect elif cyberpi.controller.is_press('middle'): cyberpi.led.on(255,0,0,id="all") cyberpi.audio.play_until(sound_effect[selected]) cyberpi.led.on(0,0,0,id="all") cyberpi.display.show_label('{}'.format(selected), 16, 60, 60, 2) cyberpi.display.show_label('{}'.format(sound_effect[selected]), 12, 52, 80, 3) ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} ##### **Grabadora** O hacernos una grabadora de bolsillo ```python import cyberpi from time import sleep cyberpi.audio.set_vol(100) cyberpi.display.show_label("A:Start Recording\nB:Play Recording",12,0,0,0) while True: cyberpi.display.show_label("Waiting.",16,0,40,1) if cyberpi.controller.is_press('a'): cyberpi.led.on(0,255,0,id="all") cyberpi.display.show_label("Listening..",16,0,40,1) cyberpi.audio.record() sleep(5) cyberpi.display.show_label("Finished..",16,0,40,1) cyberpi.audio.stop_record() elif cyberpi.controller.is_press('b'): cyberpi.led.on(0,0,255,id="all") cyberpi.display.show_label("Playing..",16,0,40,1) cyberpi.audio.play_record_until() cyberpi.display.show_label("Finished..",16,0,40,1) cyberpi.display.show_label("Waiting...",16,0,40,1) cyberpi.led.on(0,0,0,id="all") ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} # LED ##### **Colores** Podemos fijar los colores de los leds de Cyberpi con este código ```python import cyberpi # R G B Position cyberpi.led.on(255,0,0,id=1) cyberpi.led.on(255,255,0,id=2) cyberpi.led.on(255,255,255,id=3) cyberpi.led.on(0,255,0,id=4) cyberpi.led.on(0,255,255,id=5) ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} [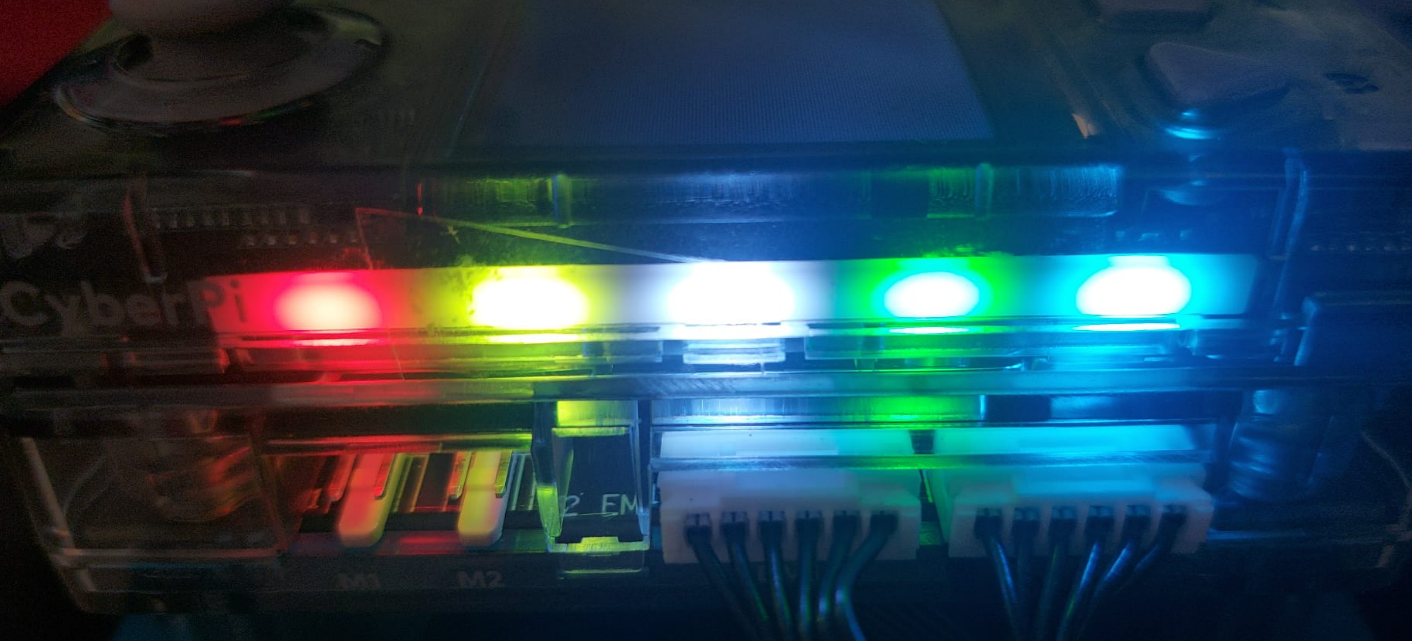](https://libros.catedu.es/uploads/images/gallery/2025-04/2025-04-29-15-08-28-whatsapp.png) ##### **Intermitencia** Podemos encender y apagar a voluntad ```python import cyberpi from time import sleep while True: # R G B Position cyberpi.led.on(255,0,0,id=1) cyberpi.led.on(255,255,0,id=2) cyberpi.led.on(255,255,255,id=3) cyberpi.led.on(0,255,0,id=4) cyberpi.led.on(0,255,255,id=5) sleep(1) # Position cyberpi.led.off(id='all') sleep(1) ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} ##### **Arco Iris** ```python import cyberpi """ Name List (str) rainbow , spoondrift , meteor_blue , meteor_green , flash_red , flash_orange , firefly """ cyberpi.led.play(name = "rainbow") ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} ##### **Movimiento leds** ```python import cyberpi from time import sleep cyberpi.led.on(255,0,0,id=1) while True: # shift all the colors 1 step to the right. # (If it is negative, it will be left shifting.) cyberpi.led.move(1) sleep(1) ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} # Entradas ##### **Botones A y B** Si aprieto el botón A pues enciendo leds, si aprieto B los apago ```python import cyberpi """ Button Name List (str) a , b up, down, left , right , middle any_direction , any_button , any """ while True: # button name if cyberpi.controller.is_press('a'): cyberpi.led.on(255,0,0,id='all') cyberpi.console.println("LED ON!") if cyberpi.controller.is_press('b'): cyberpi.led.on(0,0,0,id='all') cyberpi.console.println("LED OFF!") ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} ##### **Intensidad de la luz** *La función show\_label la veremos después, tiene el formato cyberpi.display.show\_label(texto, tamaño, color, x, y)* ```python import cyberpi cyberpi.display.show_label("LUZ=",16,0,0,0) while True: CantidadLuz = cyberpi.get_brightness() cyberpi.display.show_label(CantidadLuz,16,0,60,1) ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} ##### **Cantidad de sonido** ``` import cyberpi cyberpi.display.show_label("Loudness:",16,10,10,index=1) while True: loudness_value = cyberpi.get_loudness() cyberpi.display.show_label(loudness_value,16,80,10,index=2) ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} ##### **Nivel de batería** ```python import cyberpi cyberpi.display.show_label("Battery Level",16,10,0,index=0) cyberpi.display.show_label("Builtin:",16,10,20,index=1) cyberpi.display.show_label("Extra:",16,10,40,index=2) while True: builtin_batt = cyberpi.get_battery() extra_batt = cyberpi.get_extra_battery() cyberpi.display.show_label(builtin_batt,16,80,20,index=3) cyberpi.display.show_label(extra_batt,16,80,40,index=4) ``` # Display ##### **Contador** ```python import cyberpi cyberpi.display.show_label("Counter Program",16,0,0,0) counter = 0 while True: if counter < 100: counter = counter + 1 else: counter = 0 cyberpi.display.set_brush(counter+100, 0, 0) cyberpi.display.show_label(counter,32,48,64,1) ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} ##### **Limpiar y apagar la pantalla** ```python import cyberpi cyberpi.display.on() cyberpi.display.show_label("A:Clear the Sceen",12,0,0,0) cyberpi.display.show_label("B:Close the screen",12,0,24,1) while True: if cyberpi.controller.is_press('a'): cyberpi.display.clear() elif cyberpi.controller.is_press('b'): cyberpi.display.off() ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} ##### **Linechart** El display permite visualizar gráficas como por ejemplo este código ```python import cyberpi value = 0 while True: if value < 100: value = value + 1 else: value = 0 cyberpi.linechart.add(value) ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} ##### **Barchart** ```python import cyberpi value = 0 while True: if value < 100: value = value + 0.1 else: value = 0 cyberpi.barchart.add(value) ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} ##### **Table** ```python import cyberpi cyberpi.display.set_brush(255,0,0) cyberpi.table.add(1,1,"1,1") cyberpi.table.add(2,1,"2,1") cyberpi.table.add(3,1,"3,1") cyberpi.table.add(4,1,"4,1") cyberpi.display.set_brush(0,255,0) cyberpi.table.add(1,2,"1,2") cyberpi.table.add(2,2,"2,2") cyberpi.table.add(3,2,"3,2") cyberpi.table.add(4,2,"4,2") cyberpi.display.set_brush(0,0,255) cyberpi.table.add(1,3,"1,3") cyberpi.table.add(2,3,"2,3") cyberpi.table.add(3,3,"3,3") cyberpi.table.add(4,3,"4,4") ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} [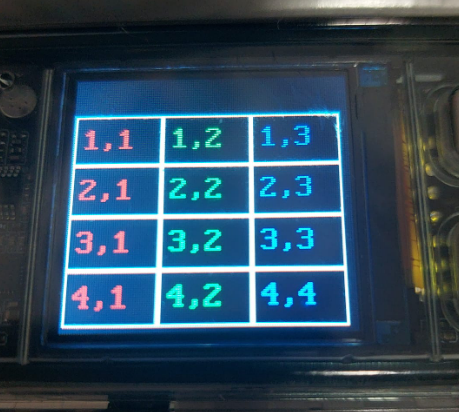](https://libros.catedu.es/uploads/images/gallery/2025-04/2025-04-29-20-15-40-whatsapp.png) ##### **Drawpixel** ``` import cyberpi import time pixel_list = ["music","picture","video","clock","play","pause","next","prev","sound","temperature","light","motion","home","gear","list","right","wrong","shut_down","refresh","trash_can","download","sunny","cloudy","rain","snow","train","rocket","car","truck","droplet","distance","fire","magnetic","gas","vision","color","overcast","foggy","sandstorm"] my_sprite = cyberpi.sprite() for p in pixel_list: my_sprite.draw_pixel(p) my_sprite.set_size(200) time.sleep(1) cyberpi.screen.render() ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} ##### **QR** ```python import cyberpi my_sprite = cyberpi.sprite() my_sprite.draw_QR("https://catedu.es/") my_sprite.set_size(400) cyberpi.screen.render() ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} [](https://libros.catedu.es/uploads/images/gallery/2025-04/2025-04-29-20-26-54-whatsapp.png) ¡¡ y funciona !!! # Sensores de movimiento ##### **Sensor agitación** ``` import cyberpi cyberpi.display.show_label("Shake Value\nA:Start",16,0,0,0) while not cyberpi.controller.is_press('a'): pass while True: shake_value = cyberpi.get_shakeval() cyberpi.display.show_label("Shake Value",16,20,0,0) cyberpi.display.show_label("{}%".format(shake_value),24,40,50,1) ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} ##### **Inclinación y rotación** El siguiente programa enseña los dos ángulos de inclinación en eje X e Y y rotación en eje Z ```python import cyberpi cyberpi.display.show_label("YAW PITCH ROLL\nA:Start",16,0,0,0) while not cyberpi.controller.is_press('a'): pass while True: pitch = cyberpi.get_pitch() roll = cyberpi.get_roll() yaw = cyberpi.get_yaw() cyberpi.display.show_label("Yaw\n\nPitch\n\nRoll\n\n",16,0,0,0) cyberpi.display.show_label("{}\n\n{}\n\n{}".format(pitch,roll,yaw),16,50,0,1) ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} El resultado es muy parecido con la función de gyro ```python import cyberpi cyberpi.reset_rotation(axis='all') cyberpi.display.show_label("Gyroscope\nA:Start",16,0,0,0) while not cyberpi.controller.is_press('a'): pass while True: x_gyro = cyberpi.get_gyro('x') y_gyro = cyberpi.get_gyro('y') z_gyro = cyberpi.get_gyro('z') cyberpi.display.show_label("X\n\nY\n\nZ\n\n",16,0,0,0) cyberpi.display.show_label("{}\n\n{}\n\n{}".format(x_gyro,y_gyro,z_gyro),16,50,0,1) ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} Y rotation ```python import cyberpi cyberpi.reset_rotation(axis='all') cyberpi.display.show_label("Rotation\nA:Start",16,0,0,0) while not cyberpi.controller.is_press('a'): pass while True: x_rotate = cyberpi.get_rotation('x') y_rotate = cyberpi.get_rotation('y') z_rotate = cyberpi.get_rotation('z') cyberpi.display.show_label("X\n\nY\n\nZ\n\n",16,0,0,0) cyberpi.display.show_label("{}\n\n{}\n\n{}".format(x_rotate,y_rotate,z_rotate),16,50,0,1) ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} # El tiempo (servicios en la nube) Podemos ver el tiempo que hace en una localidad utilizando el siguiente código: - **PON-EL-NOMBRE-DE-TU-WIFI** y **CLAVE-DE-TU-WIFI** son el nombre y la contraseña de la red wifi pues necesita conectarse a un servidor - **TU-ID-CLOUD** lo puedes encontrar en mBlock aquí **HAY QUE ESTAR LOGUEADO** [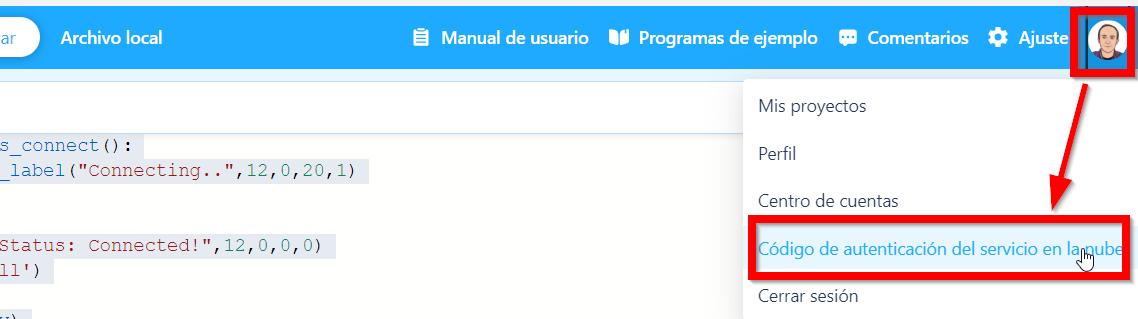](https://libros.catedu.es/uploads/images/gallery/2025-04/2025-04-29-21-10-21-mblock-v5-4-3.png) - **location\_id** es un número de identificador meteorológico, por ejemplo si ponemos *alcorisa* en [https://meteoblue.com/](https://meteoblue.com/) nos sale en la URL el código 3130563 [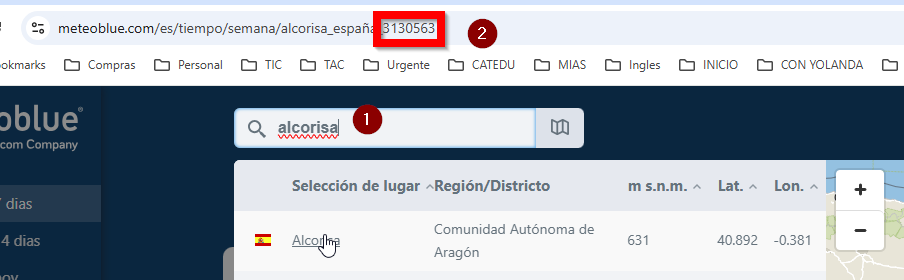](https://libros.catedu.es/uploads/images/gallery/2025-04/2025-04-29-21-06-57-tiempo-alcorisa-meteoblue.png) ``` import cyberpi ssid = "PON-EL-NOMBRE-DE-TU-WIFI" pwd = "CLAVE-DE-TU-WIFI" auth_key = "TU-ID-CLOUD" location_id = "3127059" # CALAMOCHA SEGÚN https://www.meteoblue.com/es/tiempo/semana/calamocha_espa%c3%b1a_3127059 cyberpi.led.on(255,0,0,id='all') cyberpi.display.show_label("WiFi:",12,0,0,0) if not cyberpi.wifi.is_connect(): cyberpi.display.show_label("WiFi: No Connect",12,0,0,0) cyberpi.wifi.connect(ssid,pwd) while not cyberpi.wifi.is_connect(): cyberpi.display.show_label("Connecting..",12,0,20,1) cyberpi.display.clear() cyberpi.display.show_label("Status: Connected!",12,0,0,0) cyberpi.led.on(0,255,0,id='all') cyberpi.cloud.setkey(auth_key) max_temp = cyberpi.cloud.weather("max_temp",location_id) min_temp = cyberpi.cloud.weather("min_temp",location_id) weather = cyberpi.cloud.weather("weather",location_id) humidity = cyberpi.cloud.weather("humidity",location_id) cyberpi.display.show_label("Max Temperature: {} C".format(max_temp),12,0,20,1) cyberpi.display.show_label("Min Temperature: {} C".format(min_temp),12,0,32,2) cyberpi.display.show_label("Weather: {}".format(weather),12,0,42,3) cyberpi.display.show_label("Humidity: {} %".format(humidity),12,0,52,4) ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} El resultado es (hemos puesto Calamocha) [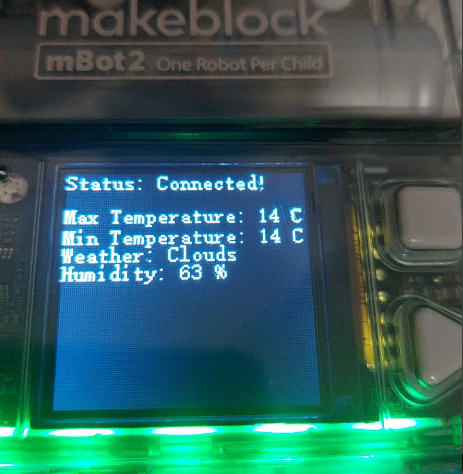](https://libros.catedu.es/uploads/images/gallery/2025-04/2025-04-29-21-13-33-whatsapp.png) No entendemos por qué no nos enseña la temperatura mínima, y además hemos elegido una localidad con estación meteorológica VOR que tiene el récord de temperatura más fría en zona habitada*Bueno ... mentirijilla, el VOR esta en Fuentes Claras, no en Calamocha*
Hay más ejemplos en [https://github.com/PerfecXX/Python-mBot2/tree/main/example/cyberpi/08-Cloud](https://github.com/PerfecXX/Python-mBot2/tree/main/example/cyberpi/08-Cloud) como la calidad del aire, pero no todas las localidades tienen datos.
# Envío de mensajes con dos mBots2 En dos mBot2 le ponemos el siguiente código: ```python import cyberpi ssid = "catedu" pwd = "alcorisa" topic = "/test_room" cyberpi.led.on(255,0,0,id='all') cyberpi.display.show_label("WiFi:",12,0,0,0) if not cyberpi.wifi.is_connect(): cyberpi.display.show_label("WiFi: No Connect",12,0,0,0) cyberpi.wifi.connect(ssid,pwd) while not cyberpi.wifi.is_connect(): cyberpi.display.show_label("Connecting..",12,0,20,1) cyberpi.display.clear() cyberpi.display.show_label("WiFi: Connected!\nEnvío de mensaje botón A o B:\n Preparado también para recepción ..",12,0,0,0) cyberpi.led.on(0,255,0,id='all') while True: ## envio de mensaje message = cyberpi.wifi_broadcast.get(topic) cyberpi.display.show_label("{}".format(message),12,0,60,1) # envío de mensaje if cyberpi.controller.is_press('a'): cyberpi.wifi_broadcast.set(topic,"\nHola soy CATEDU") elif cyberpi.controller.is_press('b'): cyberpi.wifi_broadcast.set(topic,"\nBienvenido a los cursos de Aularagón") ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} Realmente en [https://github.com/PerfecXX/Python-mBot2/tree/main/example/cyberpi/07-LAN/01-Send\_Receive](https://github.com/PerfecXX/Python-mBot2/tree/main/example/cyberpi/07-LAN/01-Send_Receive) se utilizan DOS códigos, uno para el emisor y otro para el receptor, lo que se ha hecho en el código de arriba es unirlos. # Inteligencia Artificial IA ##### **Reconocimiento de texto** El siguiente código se conecta a un servidor para leer un texto en un idioma concreto ```python import cyberpi ssid = "MIWIFI" pwd = "CONTRASENAWIFI" cyberpi.driver.cloud_translate.TTS_URL = "{TTSURL}" cyberpi.driver.cloud_translate.set_token("{ACCESSTOKEN}") cyberpi.driver.cloud_translate.TRANS_URL = "{TRANSURL}" cyberpi.driver.cloud_translate.set_token("{ACCESSTOKEN}") cyberpi.speech.set_recognition_address(url = "{NAVIGATEURL}") cyberpi.speech.set_access_token(token = "{ACCESSTOKEN}") cyberpi.led.on(255,0,0,id='all') cyberpi.display.show_label("WiFi:",12,0,0,0) if not cyberpi.wifi.is_connect(): cyberpi.display.show_label("WiFi: No Connect",12,0,0,0) cyberpi.wifi.connect(ssid,pwd) while not cyberpi.wifi.is_connect(): cyberpi.display.show_label("Connecting..",12,0,20,1) cyberpi.display.clear() cyberpi.display.show_label("Status: Connected!",12,0,0,0) cyberpi.led.on(0,255,0,id='all') cyberpi.display.show_label("Wait...",12,0,20,1) cyberpi.led.on(0,0,255,id='all') cyberpi.cloud.tts("es","Bienvenido CATEDU") cyberpi.cloud.tts("en","I speak English better: Wellcome to CATEDU") cyberpi.led.on(0,0,0,id='all') cyberpi.display.show_label("Finished!",12,0,20,1) ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} ##### **Reconocimiento de voz** En este caso hemos seleccionado el idioma 4 (el primero chinese es el 0) luego reconoce voz en idioma inglés ```python import cyberpi from time import sleep ssid = "MIWIFI" pwd = "CONTRASENAWIFI" langauge_list = ["chinese","chinese_taiwan","cantonese","japanese","english","french","german","spanish","portuguese","russian","korean","italian","Dutch"] cyberpi.driver.cloud_translate.TTS_URL = "{TTSURL}" cyberpi.driver.cloud_translate.set_token("{ACCESSTOKEN}") cyberpi.speech.set_recognition_address(url = "{NAVIGATEURL}") cyberpi.speech.set_access_token(token = "{ACCESSTOKEN}") cyberpi.driver.cloud_translate.TRANS_URL = "{TRANSURL}" cyberpi.driver.cloud_translate.set_token("{ACCESSTOKEN}") cyberpi.led.on(255,0,0,id='all') cyberpi.display.show_label("WiFi:",12,0,0,0) if not cyberpi.wifi.is_connect(): cyberpi.display.show_label("WiFi: No Connect",12,0,0,0) cyberpi.wifi.connect(ssid,pwd) while not cyberpi.wifi.is_connect(): cyberpi.display.show_label("Connecting..",12,0,20,1) cyberpi.display.clear() cyberpi.display.show_label("WiFi: Connected!",12,0,0,0) cyberpi.led.on(0,255,0,id='all') while True: cyberpi.display.show_label("A:Start Recognize",12,0,20,1) cyberpi.led.on(0,0,0,id='all') if cyberpi.controller.is_press('a'): sleep(0.5) cyberpi.led.on(0,0,255,id='all') cyberpi.display.show_label("Recognizing...",12,0,40,2) cyberpi.cloud.listen(langauge_list[4], 5) cyberpi.display.show_label("Processing...",12,0,40,2) cyberpi.led.on(0,0,0,id='all') recog_result = cyberpi.cloud.listen_result() cyberpi.display.show_label("Recognition Result\n\n{}".format(recog_result),12,0,40,2) ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} El resultado es ##### **Traductor** En este caso le damos un texto que le decimos en qué idioma está (el 7=español) y le pedimos que nos lo traduzca al 4=inglés ```python import cyberpi ssid = "MIWIFI" pwd = "MICLAVEWIFI" langauge_list = ["chinese","chinese_taiwan","cantonese","japanese","english","french","german","spanish","portuguese","russian","korean","italian","Dutch"] cyberpi.driver.cloud_translate.TTS_URL = "{TTSURL}" cyberpi.driver.cloud_translate.set_token("{ACCESSTOKEN}") cyberpi.speech.set_recognition_address(url = "{NAVIGATEURL}") cyberpi.speech.set_access_token(token = "{ACCESSTOKEN}") cyberpi.driver.cloud_translate.TRANS_URL = "{TRANSURL}" cyberpi.driver.cloud_translate.set_token("{ACCESSTOKEN}") cyberpi.led.on(255,0,0,id='all') cyberpi.display.show_label("WiFi:",12,0,0,0) if not cyberpi.wifi.is_connect(): cyberpi.display.show_label("WiFi: No Connect",12,0,0,0) cyberpi.wifi.connect(ssid,pwd) while not cyberpi.wifi.is_connect(): cyberpi.display.show_label("Connecting..",12,0,20,1) cyberpi.display.clear() cyberpi.display.show_label("WiFi: Connected!",12,0,0,0) cyberpi.led.on(0,255,0,id='all') text = "Bienvenido a los cursos a distancia de CATEDU" cyberpi.display.show_label("translate: \n{} in {}".format(text,langauge_list[7]),12,0,10,1) translated_text = cyberpi.cloud.translate(langauge_list[4], text) cyberpi.display.show_label("Result: \n{}".format(translated_text),12,0,70,2) ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} [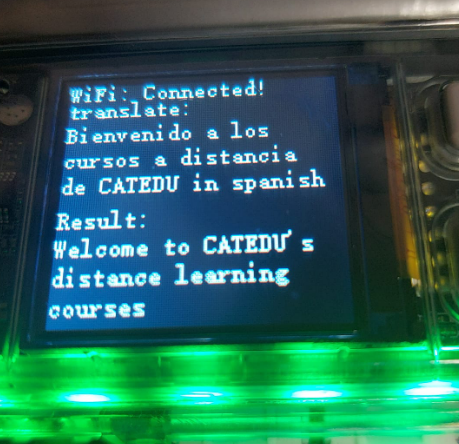](https://libros.catedu.es/uploads/images/gallery/2025-04/2025-04-29-23-09-43.png) # MovimientosLos movimientos de mBot2 se pueden definir por tiempo, distancia, ángulo y potencia, gracias a sus precisos motores de paso
##### **Pequeño baile con tiempo definido** ```python import cyberpi, mbot2 cyberpi.display.show_label("mBot2 Movement",16,0,0,0) cyberpi.display.show_label("A:Start Moving!",16,0,20,1) while True: while not cyberpi.controller.is_press('a'): pass cyberpi.display.show_label("Forward 60 RMP 1 Sec",12,0,40,2) mbot2.forward(60,1) cyberpi.display.show_label("Backward 60 RMP 1 Sec",12,0,40,2) mbot2.backward(60,1) cyberpi.display.show_label("Turn Left 60 RMP 1 Sec",12,0,40,2) mbot2.turn_left(60,1) cyberpi.display.show_label("Turn Right 60 RMP 1 Sec",12,0,40,2) mbot2.turn_right(60,1) cyberpi.display.show_label("Finished!",12,0,40,2) ``` ##### **Pequeño baile con distancia definida** En este código le decimos que vaya exactamente 100 cm ```python import cyberpi, mbot2 cyberpi.display.show_label("mBot2 Straight",16,0,0,0) cyberpi.display.show_label("A:Start Moving!",16,0,20,1) while True: while not cyberpi.controller.is_press('a'): pass cyberpi.display.show_label("Forward 100 cm",12,0,40,2) mbot2.straight(100) cyberpi.display.show_label("Backward 100 cm",12,0,40,2) mbot2.straight(-100) cyberpi.display.show_label("Finished!",12,0,40,2) ``` ##### **Pequeño baile con ángulos definidos** En este que gire +90º y luego -90º ```python import cyberpi, mbot2 cyberpi.display.show_label("mBot2 Rotation",16,0,0,0) cyberpi.display.show_label("A:Rotate Left\nB:Rotate Right",16,0,20,1) while True: if cyberpi.controller.is_press('a'): cyberpi.display.show_label("Turn Left 90",12,0,60,2) mbot2.turn(-90) elif cyberpi.controller.is_press('b'): cyberpi.display.show_label("Turn Right 90",12,0,60,2) mbot2.turn(90) ``` ##### **Pequeño baile con potencia definida** ``` import cyberpi, mbot2 from time import sleep cyberpi.display.show_label("mBot2 EM Power",16,0,0,0) while not cyberpi.controller.is_press('a'): pass mbot2.drive_power(100, -100) sleep(1) mbot2.drive_power(0, 0) ``` # Sensor ultrasonidos ##### **Medición de distancia** ```python import cyberpi,mbuild cyberpi.display.show_label("Range:", 16, 0, 0, index = 0) while True: range = mbuild.ultrasonic2.get(index = 1) cyberpi.display.show_label(range, 16, 50, 0, index = 1) ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} Podemos experimentar que es bastante preciso, más que en mBot1 [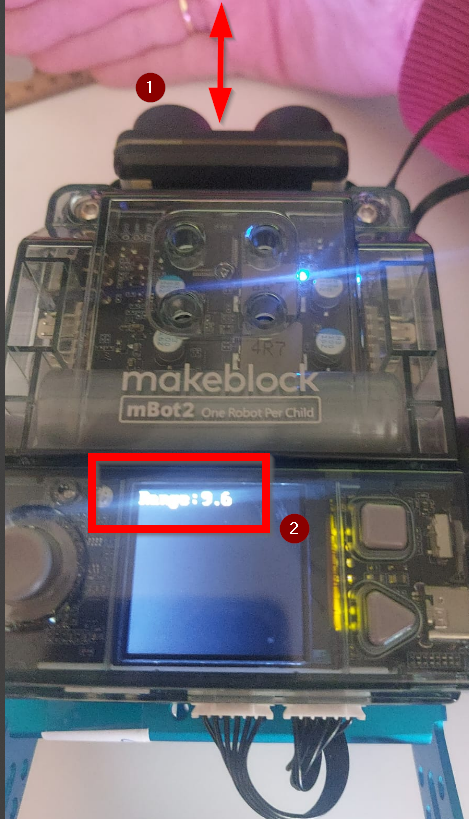](https://libros.catedu.es/uploads/images/gallery/2025-04/2025-04-30-08-18-12-whatsapp.png) Este código haría lo mismo pero alarmando que hay obstáculo o no ``` import cyberpi,mbuild cyberpi.display.show_label("Range:", 16, 20, 0, index = 0) while True: range = mbuild.ultrasonic2.get(index = 1) cyberpi.display.show_label(range, 16, 70, 0, index = 1) if range < 10: cyberpi.led.on(255,0,0,id="all") cyberpi.display.show_label("Obstacle!", 16, 0, 20, index = 2) else: cyberpi.led.on(0,255,0,id="all") cyberpi.display.show_label("No Obstacle", 16, 0, 20, index = 2) ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} # Evita obstáculos Basándonos en el código que hemos visto de [https://github.com/PerfecXX/Python-mBot2/blob/main/example/mbuild/01-Ultrasonic%20Sensor2/02-Obstacle%20Detection.py](https://github.com/PerfecXX/Python-mBot2/blob/main/example/mbuild/01-Ultrasonic%20Sensor2/02-Obstacle%20Detection.py) le añadimos las instrucciones de - Si hay obstáculo que gire - Si no hay obstáculo que tire p'alante Previamente una rutina de no empezar si no se aprieta el botón A ``` import cyberpi,mbuild, mbot2 cyberpi.display.show_label("PULSA A PARA COMENZAR",16,0,20,1) while not cyberpi.controller.is_press('a'): pass while True: range = mbuild.ultrasonic2.get(index = 1) cyberpi.display.show_label(range, 16, 70, 0, index = 1) if range < 40: cyberpi.led.on(255,0,0,id="all") cyberpi.display.show_label("Obstacle!", 16, 0, 20, index = 2) cyberpi.display.show_label("Girando un segundo",12,0,60,2) mbot2.turn_left(60,1) else: cyberpi.led.on(0,255,0,id="all") cyberpi.display.show_label("No Obstacle", 16, 0, 20, index = 2) mbot2.drive_power(70, -70) ``` a lo mejor habría que quitarle un poco la potencia en mbot2.drive\_power(70, -70) pero mola : # Sensor de líneas ##### **Probando la detección de líneas.** ```python import cyberpi,mbuild cyberpi.display.show_label("RGB PROBE STATE\nL2:\nL1:\nR1:\nR2:\n", 16, 0, 0, index = 0) while True: l2_line_state = mbuild.quad_rgb_sensor.is_line("L2",1) l1_line_state = mbuild.quad_rgb_sensor.is_line("L1",1) r1_line_state = mbuild.quad_rgb_sensor.is_line("R1",1) r2_line_state = mbuild.quad_rgb_sensor.is_line("R2",1) cyberpi.display.show_label(l2_line_state, 16, 30, 18, index = 1) cyberpi.display.show_label(l1_line_state, 16, 30, 36, index = 2) cyberpi.display.show_label(r1_line_state, 16, 30, 54, index = 3) cyberpi.display.show_label(r2_line_state, 16, 30, 72, index = 4) ``` {{@13396#bkmrk-extraido-de-https%3A%2F%2F}} Como puedes ver va detectando las líneas en los 4 sensores que tiene : ##### **Más probatinas...** En [https://github.com/PerfecXX/Python-mBot2/tree/main/example/mbuild/02-Quad%20RGB%20Sensor](https://github.com/PerfecXX/Python-mBot2/tree/main/example/mbuild/02-Quad%20RGB%20Sensor) puedes descargarte más scripts que visualizan como el sensor puede detectar el color y el brillo. Nosotros aquí sólo te hemos enseñado el último el de detectar la línea. [](https://libros.catedu.es/uploads/images/gallery/2025-04/2025-04-30-08-32-43-python-mbot2-example-mbuild-02-quad-rgb-sensor-at-main-perfecxx-python-mbot2.png) # Sigue líneas En este caso sólo vamos a utilizar de los 4 sensores quad que tiene los 2 de en medio con la instrucción ``` mbuild.quad_rgb_sensor.get_line_sta("middle", 1) ``` El valor que devuelve esta instrucción puede ser : - **0 o en binario 00** que quiere decir que los dos sensores detectan blanco, por lo tanto habría que volver hacia **atrás** para recuperar la línea - **1 o en binario 01** que significa que el sensor de la derecha detecta línea pero el de la izquierda no, por lo tanto hay que girar a la **derecha** - **2 o en binario 10** que significa que el sensor de la izquierda detecta línea pero el de la derecha no, por lo tanto hay que girar a la **izquierda** - **3 o en binario 11** que quiere decir que los dos sensores detectan línea, por lo tanto todo bien, **recto** El código es ```python import event, time, cyberpi, mbuild, mbot2 cyberpi.display.show_label("PULSA A PARA COMENZAR",16,0,20,1) while not cyberpi.controller.is_press('a'): pass while True: if mbuild.quad_rgb_sensor.get_line_sta("middle", 1) == 0b00: mbot2.backward(50) if mbuild.quad_rgb_sensor.get_line_sta("middle", 1) == 0b11: mbot2.forward(50) if mbuild.quad_rgb_sensor.get_line_sta("middle", 1) == 0b01: mbot2.turn_right(50) if mbuild.quad_rgb_sensor.get_line_sta("middle", 1) == 0b10: mbot2.turn_left(50) ``` Fuente Javier Quintana El resultado es