El contenido de esta página es de {{@12107#bkmrk-ejemplos-mbot2-pere-}}
PARA REALIZAR ESTE PROGRAMA SE NECESITAN DOS CYBERPIS QUE VAN A ESTAR CONECTADOS EN LA MISMA LAN
Ahora un Cyberpi con su joystick controlará los movimientos del otro Cyberpi montado en su mBot2 [](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-52-26-control-remoto-pdf.png) {{@12107#bkmrk-ejemplos-mbot2-pere-}}
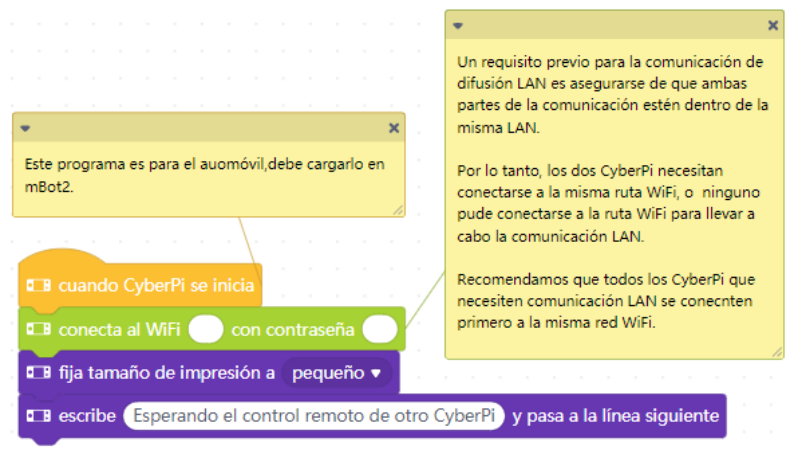
Para este proyecto hemos de cargar dos CyberPy. [](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-53-02-control-remoto-pdf.png) ##### **CODIGO EN EL CYBERPI RECEPTOR MONTADO CON MBOT2** [**https://planet.mblock.cc/project/projectshare/7552114**](https://planet.mblock.cc/project/7552114)Hay que poner los dos Cyberpis en la misma Wifi (SSID y contraseña)
[](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-53-25-control-remoto-pdf.png) {{@12107#bkmrk-ejemplos-mbot2-pere-}} [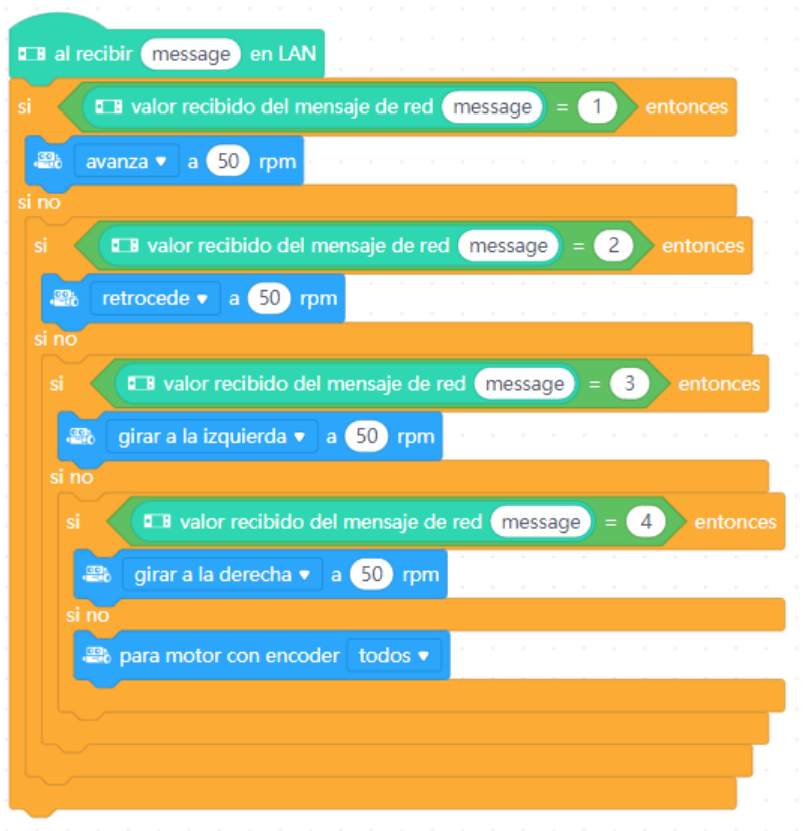](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-55-55-control-remoto-pdf.png) {{@12107#bkmrk-ejemplos-mbot2-pere-}} ##### **CODIGO EN EL CYBERPI QUE HARÁ DE CONTROL REMOTO** [**https://planet.mblock.cc/project/7552213**](https://planet.mblock.cc/project/7552213) **[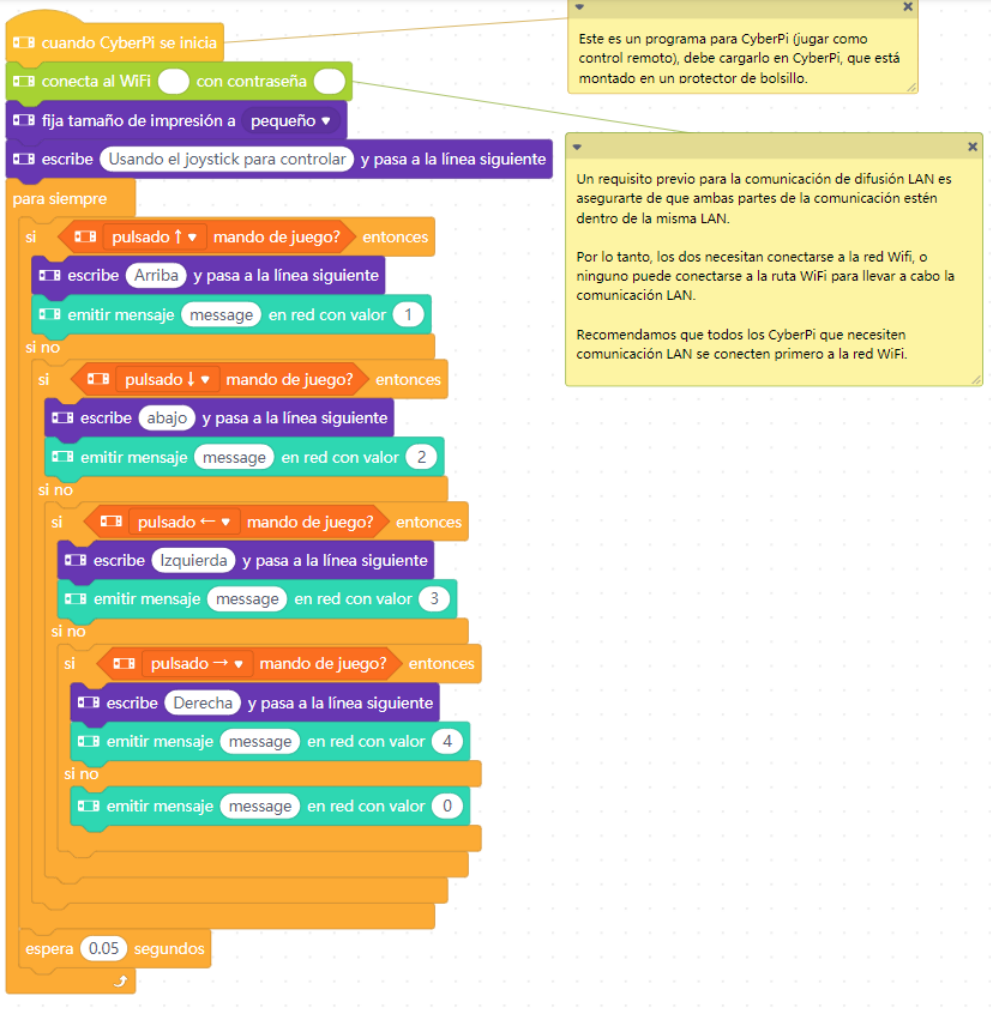](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-17-10-56-57-control-remoto-pdf.png)** {{@12107#bkmrk-ejemplos-mbot2-pere-}} ##### **RESULTADO** ****El contenido de esta página es de {{@12107#bkmrk-pere-manel-verdugo-z}}