Vamos a hacer un programa que el servo se mueva JUSTO EL MISMO ÁNGULO QUE LA PLACA ECHIDNA para conseguir que el servo se mantenga en su misma posicón.
Para ello hay que tener en cuenta que: - La Echidna cuando no esta inclinada muestra un valor de 350º, vamos a llamarlo ángulo de **inclinación** - El servo cuando está en su punto medio, el brazo está a 90º, vamos a llamarlo **ángulo** al valor que quiero que se mueva el brazo del servo - Por lo tanto entre los dos variables será 350-90=260º - Sí **Ángulo** es igual a **inclinación** menos esa diferencia **260** entonces tenemos que el servo se mantendrá constante en su posición El programa es : [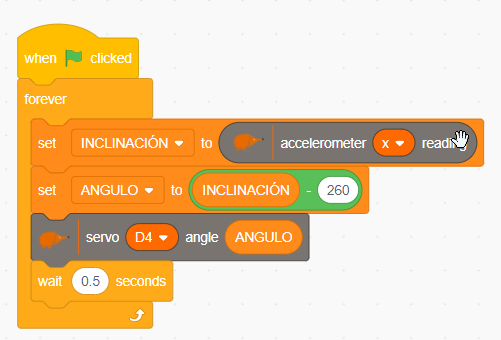](https://libros.catedu.es/uploads/images/gallery/2024-12/montaje14-servo-codigo.png) Se le añade un pequeño retardo de 0.5segundos pues se vuelve algo loco El resultado es Todos los programas de este curso se encuentran en este repositorio: [https://github.com/JavierQuintana/Echidna](https://github.com/JavierQuintana/Echidna)**¿Te atreves..?** A realizar un programa que mueva el **servo según el valor del Joystick ejeY**?