# Servo
##### **Servo**
El servo es un motor que podemos controlar el ángulo de giro, hay diferentes clases, pero nos vamos a centrar en este que tiene un precio muy barato: SG90 que varía desde 0º a 180º
[](https://libros.catedu.es/uploads/images/gallery/2024-12/arduino-servo-sg90.webp)
Fuente Luis Llamas CC-B-SA [https://www.luisllamas.es/controlar-un-servo-con-arduino/](https://www.luisllamas.es/controlar-un-servo-con-arduino/)
##### **Cómo se conecta el servo con la Echidna**
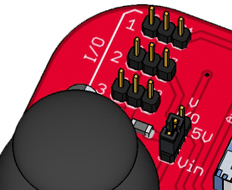
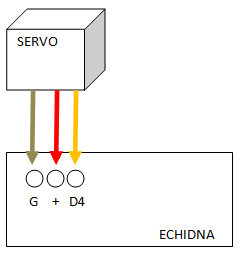
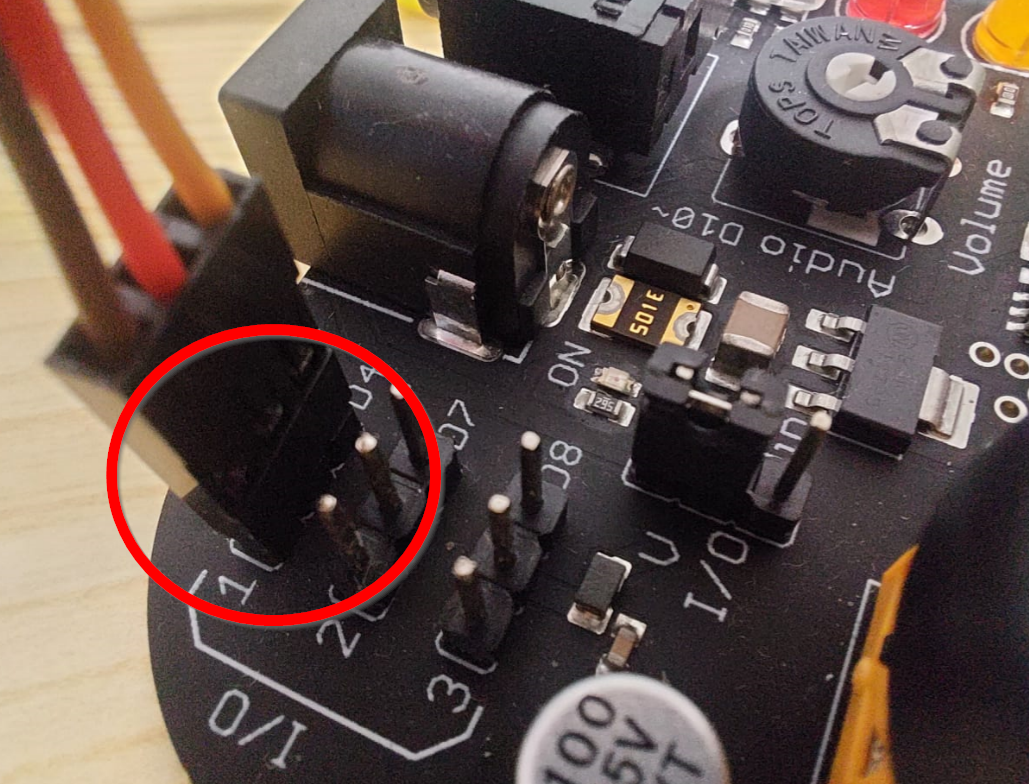
El servo tiene tres cables,, marrón, rojo, y amarilo machos, conéctalos a uno de los pines de las extensiones, por ejemplo al D4 marcado como **1**. Fíjate bien, el marrón indica la masa hacia el borde y el amarillo hacia la cara interior:
 [](https://libros.catedu.es/uploads/images/gallery/2024-12/2024-12-08-18-10-25-whatsapp.png)
##### **Experimenta con el servo con EchidnaScratch !**
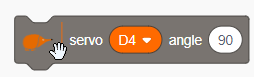
Entra en EchidnaScratch, saca su instrucción a la palestra y haz dos cliks, experimenta con varios ángulos, verás que menores que lo mínimo es 0º y lo máximo 180º
[](https://libros.catedu.es/uploads/images/gallery/2024-12/instruccion-servo.png)
**SUPERFÁCIL !!!**
Aprende más sobre servos en esta página de [Luis Llamas](https://www.luisllamas.es/controlar-un-servo-con-arduino/).
##### **Experimenta con el servo c****on mBlock**
Para experimentar tienes que usar esta instrucción
[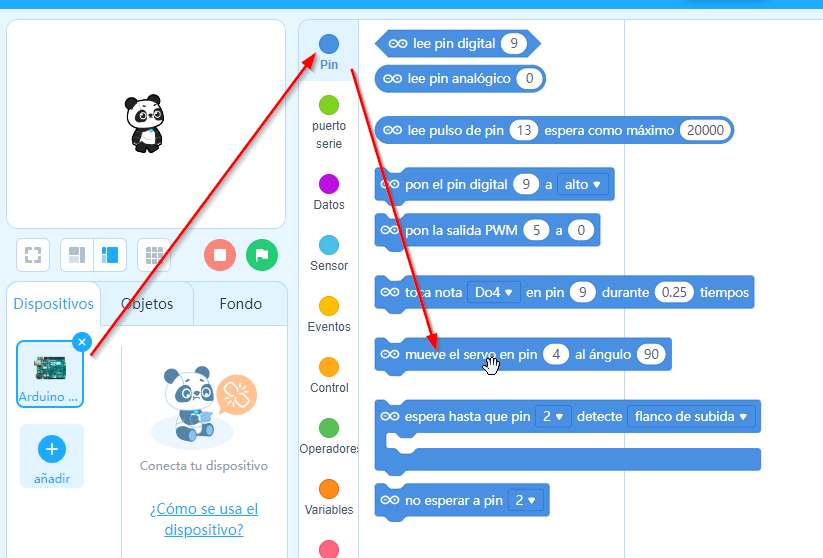](https://libros.catedu.es/uploads/images/gallery/2023-11/echidna-servo1.jpg)
Si intentamos trabajar con el servo con ángulos mayores de 180ª no hace caso, va al valor 180ª. Si ejecutas este programa lo verás:
[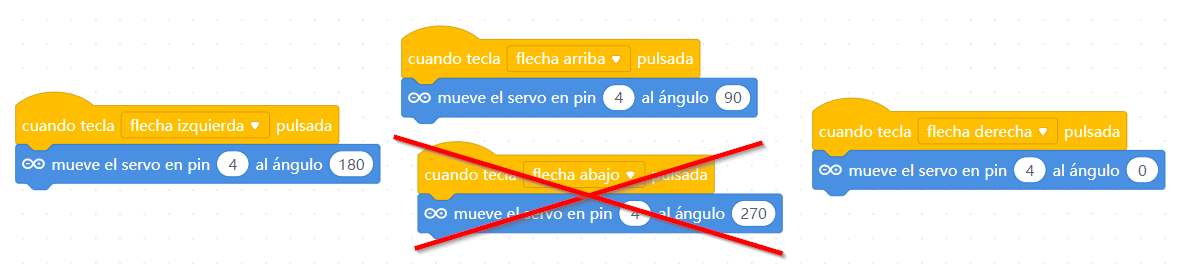](https://libros.catedu.es/uploads/images/gallery/2023-11/echidna-servo2.jpg)
Mira la diferencia con un **servo de rotación continúa**, fíjate como:
- Los extremos 0º y 180º es a máxima velocidad, pero un sentido u otro.
- 90º es parado. - Un valor intermedio es menos velocidad (se ve el ejemplo 80º y 100º)
- Si tiene deriva, (cosa frecuente) hay un potenciómetro para ajustar.