# 1. ¿Qué es Lego Wedo?
# 1.1 Introducción
< 

# 1.3 ¿Qué es LEGO WeDo?
Es un set de LEGO® que permite la construcción de 12 diferentes actividades (y las que permita la imaginación) para introducir al alumno en robótica
2. En este curso nos centramos en el\*\* LEGO WEDO 1.0 modelo 9580 \[aprox 120€\](http://www.robotix.es/es/lego-y-education-wedo-construction-set-lego-education)\*\*
- \*\*Se me ha perdido alguna pieza ¿dónde puedo encontrar recambios?\*\* - Piezas comunes \[aprox. 5€\](http://www.robotix.es/es/le-replacement-pack-le-wedo-1-lego-education) - Sensor distancia \[aprox 20€\](http://www.robotix.es/es/motion-sensor-movimiento-lego-education) - Sensor inclinación \[aprox 20€\](http://www.robotix.es/es/tilt-sensor-inclinacion-lego-education) - Motor \[aprox 20€\](http://www.robotix.es/es/medium-motor-wedo-20-lego-education) - HUB USB \[aprox 30€\](http://www.robotix.es/es/lego-usb-hub-lego-education)
# 1.4 Offline Scratch-LegoWedo
La versión Offline tiene la ventaja de la rapidez en configuración y ejecución pero la desventaja de no tener los programas online, (con el riesgo de no estar disponibles, perderlos,,) pero sí que se pueden compartir.
## Descarga
Entramos en [https://scratch.mit.edu/download](https://scratch.mit.edu/download) y descargamos
> no existe la versión Linux :(
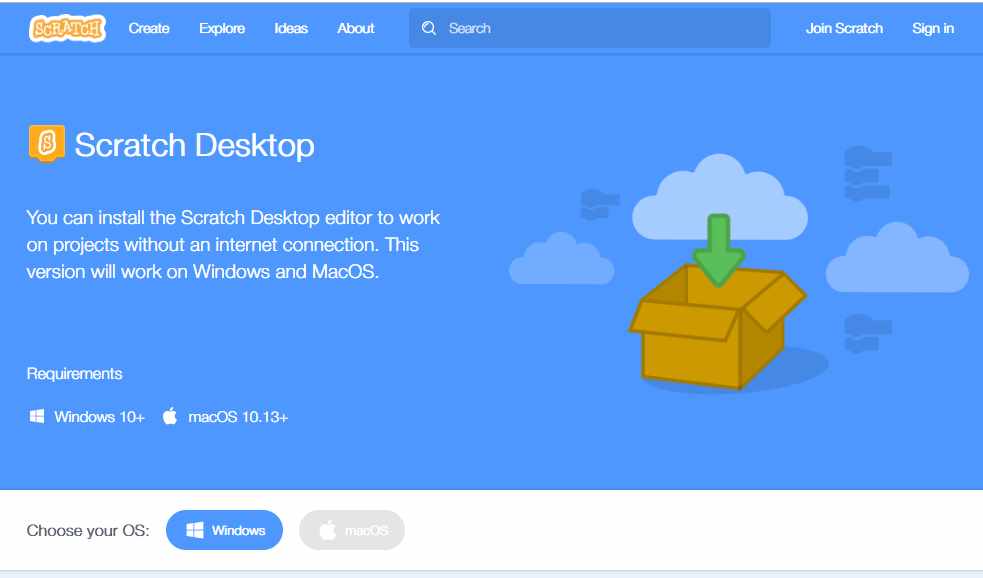
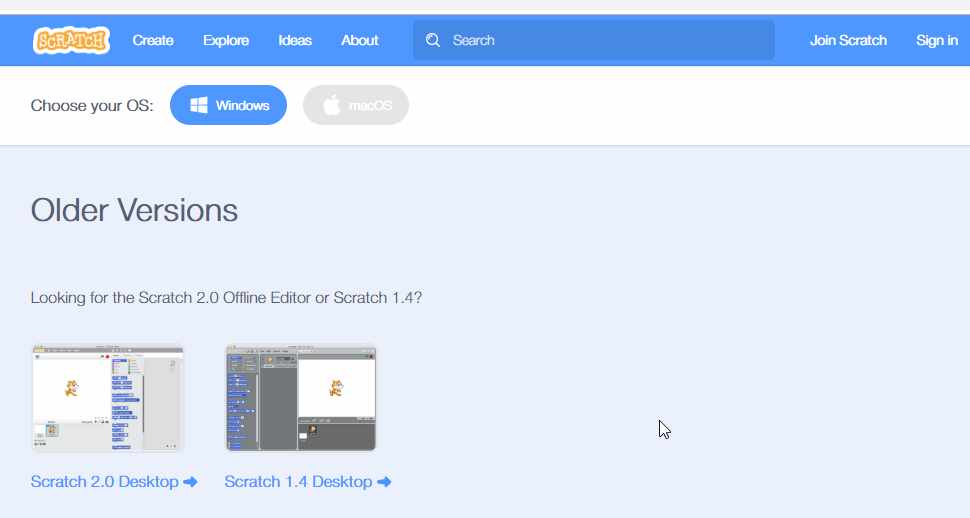
**RECOMENDAMOS LA VERSIÓN 1.4** ir abajo
## Configuración en SCRATCH 1.4
## Configuración en Scratch 2.4
# 1.5 LegoWedo parts
Las piezas más fundamentales que tiene este kit son:
 **Motor** Permite que las cosas se muevan evidentemente ;)
---
 **Sensor de distancia.**detecta la distancia del objeto que está frente a él. Da valores desde 0 a 100, el máximo alrededor de 30 cm). El origen 0 está algo alejado
---
**Sensor de inclinación** Devuelve estos valores según la inclinación:
- 0 = Sin inclinación, horizontal - 1 = Inclinado hacia abajo - 2 = inclinado hacia la derecha - 3 = inclinado hacia arriba - 4 = inclinado hacia la izquierda
**Interface**:Conexión de los anteriores componentes al ordenador
Fuentes [https://wiki.scratch.mit.edu/wiki/LEGO%C2%AE\_WeDo%E2%84%A2\_Construction\_Set](https://wiki.scratch.mit.edu/wiki/LEGO%C2%AE_WeDo%E2%84%A2_Construction_Set)
Notas:
- Se pueden[ adquirir aparte ](http://www.ro-botica.com/tienda/LEGO-Education/LEGO-WeDo/)si se rompen o se pierden
- **No** se puede poner **los tres a la vez** (motor+sensor distancia+sensor inclinación)
- El sensor de inclinación **sólo proporciona un valor a la vez** (es decir, si está a la vez hacia arriba y a la derecha sólo dará o 2 o 3), en el interior es un objeto que según la gravedad abre o cierra el contacto de 4 interruptores (que mandan los códigos 1,2,3,4) y no puede cerrar dos a la vez.
# 1.6 Instrucciones LegoWedo parts
## **Encender motor**
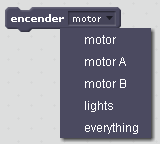
- Enciende el motor
- Tenemos varias opciones, motor A o B por si tenemos dos motores conectados (A o B según donde estén conectado en la interface, ver última fila)
- Si tuvieramos LegoWedo, también tiene luces pero en este curso lo omitimos
## Fijar fuerza del motor

- Prepara el motor a una fuerza (equivalente a la velocidad) determinada
- Valor mínimo 1 y máximo 100
- Esta instrucción se tiene que utilizar después de la anterior.
- Ejemplo:

## Apagar el motor
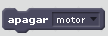
- Apaga el motor.
## Encender motor por
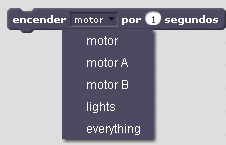
Permite encender el motor por un tiempo predeterminado
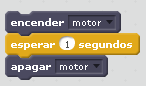
Esta instrucción es equivalente a todos los sentidos a estas tres:
## Fijar dirección del motor.
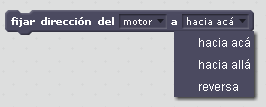
Fija el sentido de giro del motor (la traducción del español no la vemos muy acertada, pero nosotros te la traducimos ;)
- hacia acá = sentido de las agujas del reloj
- hacia allá = sentido contrario a las agujas del reloj
- reversa = sentido contrario al indicado en la última instrucción
## Cuando inclinación sea.
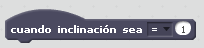
- Empieza a ejecutar el programa cuando el sensor de inclinación devuelve un 1 (es decir, cuando inclinamos el sensor hacia abajo)
- El 1 se puede cambiar por los cuatro valores del sensor 0-1-2-3-4
- Se puede cambiar el = por not=
Por ejemplo si ponemos :
not= 0 entonces ejecuta el programa cuando el sensor no está en la posición horizontal.
## Cuando la distancia sea.
El programa correspondiente se ejecuta cuando el sensor detecta
un objeto a menos de 20
Se puede cambiar el 20 por supuesto, y el símbolo < por >
## Distancia

Variable que devuelve el sensor distancia entre 0 y 100 (el 0 está algo alejado del sensor)
## Inclinación

Variable que devuelve el sensor inclinación
- 0 = Sin inclinación, horizontal
- 1 = Inclinado hacia abajo
- 2 = inclinado hacia la derecha
- 3 = inclinado hacia arriba
- 4 = inclinado hacia la izquierda