2. Construcciones
- 2.0 Construcciones
- 2.1 Pájaros
- 2.2 Cocodrilo hambriento
- 2.3 Chutador a gol
- 2.4 Gigante colgante
- 2.5 Animadores
- 2.6 León
- 2.7 Peonza
- 2.8 Mono percusionista
- 2.9 Pájaro
- 2.10 Portero
- 2.11 Avión
- 2.12 Barco
2.0 Construcciones
En este módulo se tratarán las construcciones típicas de LEGO WEDO que recomienda la marca
Agradecimientos a Ro-botica.com y Aprendiendo con robótica CEIP Gil Tarín de la Muela por publicar los PDFs de las construcciones, y a mis hijos por ayudarme a construirlos
2.1 Pájaros
Objetivo
Esta construcción es simple, podría ser la primera que se construye por lo que se recomienda realizar una programación con dificultad gradual:
- Realizarla sin interacción, sólo moviendo el motor
- Después moviendo el motor durante un segundo
- Cambiar el sentido de giro, primero hacia un sentido y luego que cambie
- Interaccionar con algún objeto de Scracth
- Interaccionar con sensor de distancia
Construcción
Lo podemos descargar aquí en pdf o en este enlace Dropbox
Propuesta
Que los pájaros bailen en un sentido y luego en otro
Solución
Otras propuestas
Se acerca la mano y los pájaros dan vueltas
Se acerca la mano y hacen giro hacia un sentido y luego otro
Interacción con algún objeto de Scratch
2.2 Cocodrilo hambriento
Objetivo
Es sin duda la construcción que identifica este set de Lego. Se trata de un cocodrilo que tiene que abrir o cerrar la boca interactuando con el objeto que se encuentre en la boca. Aquí se trabaja:
- La entrada de un sensor
- La interacción que produce de forma real cerrando la boca
- Otras interacciones podrían ser de forma virtual: Personaje cocodrilo abriendo y cerrando la boca con sonido incorporado
Construcción
En este enlace tenemos el pdf o en este otro en Dropbox
Propuesta
De momento el enunciado que proponemos será que cierre la boca si se introduce un objeto y al cabo de 1 segundo que la abra para poder liberar el objeto:
Solución

Otra propuesta
Que no pare de masticar mientres esté el objeto
Solución
Fuente http://www.simonhaughton.co.uk/2010/06/lego-wedo-and-scratch.html
Otra propuesta
Que el caiman cierre y abra la boca varias veces cuando detecte un objeto
Solución
Fuente Codigo 21
Programa compartido por código 21 en este enlace
2.3 Chutador a gol
Objetivo
Se busca una interacción fácil entre el sensor distancia y el motor.
Construcción
Aquí en formato PDF
Propuesta
La propuesta es fácil de adivinar ¿no? :
Solución

2.4 Gigante colgante
Objetivo
En esta construcción se trabajan dos aspectos:
- Los mecanismos de transformación del movimiento giratorio en un multiplicador de fuerza como es el tornillo sinfin
- La programación interactuando con el sensor de inclinación
Construcción
Aquí en formato PDF o aquí en Dropbox, pero CON UNA OBSERVACIÓN aconsejamos utilizar el sensor inclinación en lugar del de distancia ¿por qué? porque hemos experimentado que el control de la grúa con el sensor distancia es muy difícil, no sólo en programación, sino también en sensibilidad, provocando que la grúa se pase de los límites de construcción (por ejemplo que baje más bajo que la horizontal) y provoca que las piezas sufran tensión saltando la construcción.
Aunque a estos les ha ido bien con el de proximidad.
Otra cosa: Si no se construye bien, el motor va frenado y no va.

Propuesta
Nuestra propuesta como hemos advertido antes es utilizando el sensor inclinación: Según su valor inclinado hacia arriba o hacia abajo, así actua la grua levantando al gigante:
Solución
La puedes descargar aquí (sb2 - 54.07 KB).
Otra propuesta
Levantarlo con el teclado:
2.5 Animadores
Objetivo
Interacción con el sensor distancia y conversión de movimiento rotatorio con oscilante
Construcción
En formato PDF o en Dropbox
Propuesta
Si ponemos un obstáculo delante del sensor, los animadores empiezan a bailar:
Solución
Se ha añadido un poco de música para animar más:
2.6 León
Objetivo
Trabajar el sensor de inclinación con la interacción de una construcción
Construcción
En formato PDF y en Dropbox
Propuesta
Realizar un programa que al inclinar el sensor de inclinación, el león se levante y ruga. Al inclinarlo hacia abajo, el león se tumbe:
Solución
La solución te lo puedes descargar aquí (sb2 - 61.34 KB). y el código es el siguiente:
se ha reducido la velocidad pues iba muy rápido y desmontaba la construcción
y sí... ya sé que no es un rugido, es un ladrido, pero no hay otra cosa en la biblioteca, y mi voz no es muy grave
Propuesta
La idea es de esta página web, propone poner el sensor distancia en el hocico
De esta manera ya le podemos dar más interacción:
Solución
Una solución es esta:
O esta: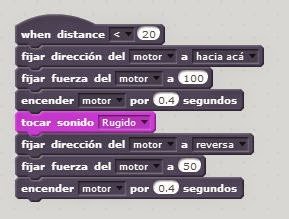
O aquí en Scratch: https://scratch.mit.edu/projects/38093952/
2.7 Peonza
Objetivos
La peonza inteligente es un buen ejemplo de cómo la tecnología puede facilitar la ejecución de algo manual
- Utilización del sensor distancia
- Cálculo de la distancia de forma experimental para su ejecución
- Motor y engranaje multiplicador para el aumento de la velocidad de rotación
Construcción
En formato PDF en este enlace y también en Dropbox
Propuesta
La peonza tiene que girar cuando la distancia sea tal que detecte que esta encima de una superficie
Solución
El valor de 5 es arbritario, es la distancia tal que detecte que hay una superficie para rodar la peonza
Otras propuestas
Es que interactue con elementos del Scratch como vemos en el vídeo
2.8 Mono percusionista
Objetivos
Aquí se busca la interacción con los objetos, y es recomendable interactuar con Scratch en los disfraces y sonidos
- Interacción sensor distancia
- Movimientos no rotativos, mecanismo de un movimiento oscilante
- Interacción con objeto de Scratch en disfraz y en sonido
Construcción
Aquí en formato PDF o en Dropbox
Propuesta
El mono toca el tambor si se le acerca el objeto de percusión, y además en el scratch interactua con el objeto mono cambiando disfraz y con sonido de percusión
En el caso anterior se ha elegido el mono que sale en la biblioteca predeterminado, pero también existe la opción de dibujar uno:
Solución
El programa te lo puedes descargar aquí con el objeto gorila y el sonido
2.9 Pájaro
Objetivo
El principal objetivo de esta actividad es interactuar con el sensor de inclinación, su respuesta tiene que ser en algún objeto de Scratch pues esta construcción carece de motor.
Construcción
Aquí lo tienes en formato PDF o en Dropbox
Propuesta
Nuestra propuesta es una interacción con sonido y con disfraz del objeto en Scratch:
Solución
Aquí el programa para descargar en formato Scratch pajaro.sb2
2.10 Portero
Objetivo
Esta construcción trabaja muy bien la gamificación: la temática del futbol es una buena motivación y las posibilidades son varias fomentando la creatividad.
- Transmisión: Se transforma el movimiento rotatorio del motor en un movimiento alternante del portero
- Sensor distancia como detector de eventos: El gol
- Interacción con Scratch
Construcción
Aquí en formato PDF o en Dropbox
Propuesta
- Si marcas un gol, el personaje de Scratch cambia de disfraz (la chica cambia de las manos bajadas a las manos subidas)
- También si marcas un gol, la chica dice gol y suena una música Podemos introducir programación un poco más avanzada, con envío de mensajes de objetos a otros:
-
- Si marca gol, se muestra una pelota durante unos segundos
Ampliación: Poner un marcador (variable que contabilice los goles)
Solución
Aquí tienes el programa descargado (sb2 - 145643 B). en formato sb2
Son dos objetos, la chica (que tiene dos disfraces) y la pelota:
La chica tiene el programa principal, y envía un mensaje:
El mensaje es recogido por el objeto pelota que tiene este programa:
Solución
Aquí en vez de mover contínuamente el portero, es según las flechas:
El programa te lo puedes descargar aquí (sb2 - 145712 B).
2.11 Avión
Objetivos
Se trabaja la interacción con Scratch, especialmente el control del movimiento y el sensor de posición
Construcción
Aquí en formato PDF o en Dropbox
Propuesta
Realizar el movimiento de un avión según el valor del sensor de desplazamiento, con movimiento de la hélice del avión y sonido (ya que estamos! )
Solución
Aquí te puedes descargar el programa (sb2 - 17650 B).
2.12 Barco
Objetivo
- Aprender los mecanismos de transformación de movimiento rotatorio del motor al ondulatorio del barco
- Programación interactiva del sensor de rotación con un objeto de Scratch
Construcción
Aquí en formato PDF o aquí en Dropbox
Propuesta
Realizar la construcción del barco navegante, y también otro en el Scratch, los dos se deben de mover sincronizados gracias al sensor de inclinación colocado en el casco del barco
Solución
Son dos programas, uno que mueve el motor y otro que gira el objeto del Scratch según el sensor inclinación
Se podría hacer todo en un bucle
Te lo puedes descargar aquí (sb2 - 274.12 KB).