Cada sensor o actuador es accesible mediante **puertos numerados desde P0 hasta P15**. Por ejemplo, las luces LED situadas bajo la placa se activan desde el puerto P15. Los puertos P13 y P14 corresponden a los sensores del seguidor de líneas.
##### Biblioteca de bloques de Cutebot Para controlar Cutebot es preciso programar previamente la placa micro:bit. Los bloques de programación para el control de Cutebot no están disponibles inmediatamente en el editor MakeCode, por lo que deben ser cargados antes de comenzar a programar. Para ello hay que pulsar sobre el menú **+Extensiones** de MakeCode. [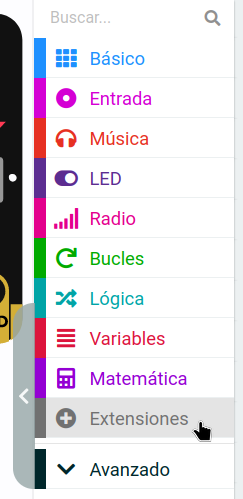](https://libros.catedu.es/uploads/images/gallery/2023-09/extensiones.png) Se desplegará un **mosaico de imágenes de accesorios** entre los que se encuentran varios robots. Tan sólo hay que buscar la imagen correspondiente a Cutebot y pulsar sobre ella. [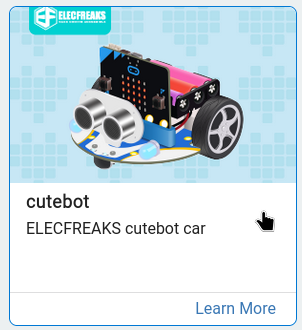](https://libros.catedu.es/uploads/images/gallery/2023-09/seleccion-cutebot.png) Tras unos instantes, se cargarán **dos nuevos menús de bloques**, uno llamado **Cutebot** para el control del robot y otro llamado **Neopixel** para producir efectos de luces con los LED colocados bajo la placa. El menú **Cutebot** ofrece **bloques** para el control de la velocidad de las ruedas, para ajustar el color de las luces, para leer los sensores de infrarrojos, de líneas y de obstáculos y para accionar los servomotores que pudieran conectarse. [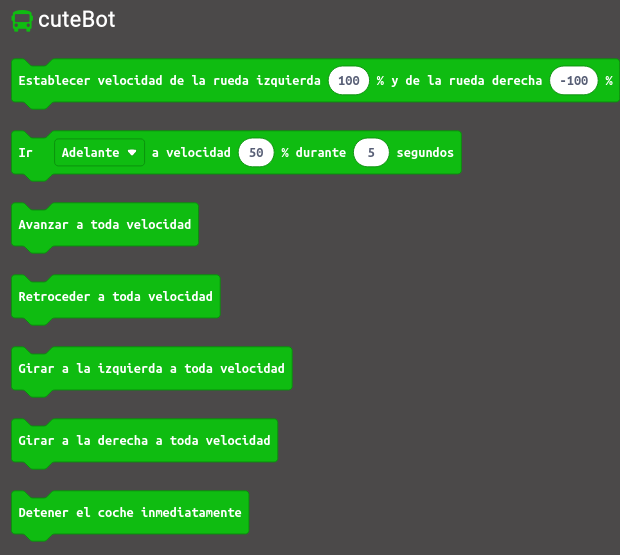](https://libros.catedu.es/uploads/images/gallery/2023-09/menu-cutebot.png) ##### Cutebot se mueve Para probar Cutebot, vamos a programar un pequeño bucle que haga **avanzar una corta distancia al robot cuando detecte un ruido fuerte**, como una palmada. Adicionalmente, el robot encenderá las luces frontales y emitirá un breve pitido de confirmación. El código a introducir es el siguiente: [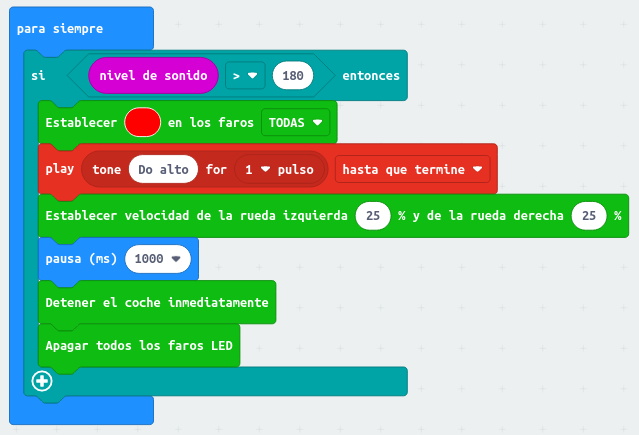](https://libros.catedu.es/uploads/images/gallery/2023-09/cute-palmada.png) La secuencia que se ejecuta continuamente dentro del bucle **para siempre** consta de los siguientes pasos: - Comprobar si el nivel de sonido supera un cierto umbral, en nuestro ejemplo, 180. - En caso afirmativo encender las dos luces frontales con luz roja. - Tocar una nota musical breve y esperar a que termine de sonar. - Hacer girar las dos ruedas hacia adelante a un 25% de su velocidad máxima. - Esperar un segundo. - Detener las ruedas. - Apagar las luces. En algunos casos, Cutebot no conseguirá avanzar en línea recta. Esto ocurrirá cuando las ruedas giren a velocidades ligeramente distintas, efecto producido por la variabilidad en las características de los motores. Por ejemplo, el robot se desviará a la derecha cuando la rueda izquierda gire a una velocidad algo mayor que la derecha. Para solucionar este problema conviene reducir ligeramente la velocidad de la rueda izquierda o bien aumentar la velocidad de la rueda derecha. [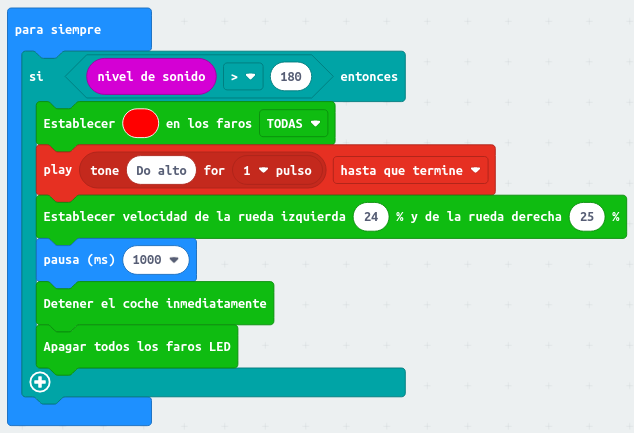](https://libros.catedu.es/uploads/images/gallery/2023-09/reducir-velocidad.png)