3 Montaje mClon con nanoArduino
- 3.1 Pasos previos
- 3.2 Comenzamos
- 3.3 Cableado esquema
- 3.4 Cableado motores
- 3.5 Cableado sensores
- 3.6 Cableado accesorios
- 3.7 Cableado extras
3.1 Pasos previos
Los pasos al detalle lo explica en https://tecnoloxia.org/mclon/estrutura/pasos-previos/ pero con la propuesta de Catedu sólo tenemos que seguir los siguientes pasos:
3.1.1 Lo que tienes que hacer tú
Tienes que doblar los pines de los sensores siguelíneas para que queden perpendiculares al sensor:
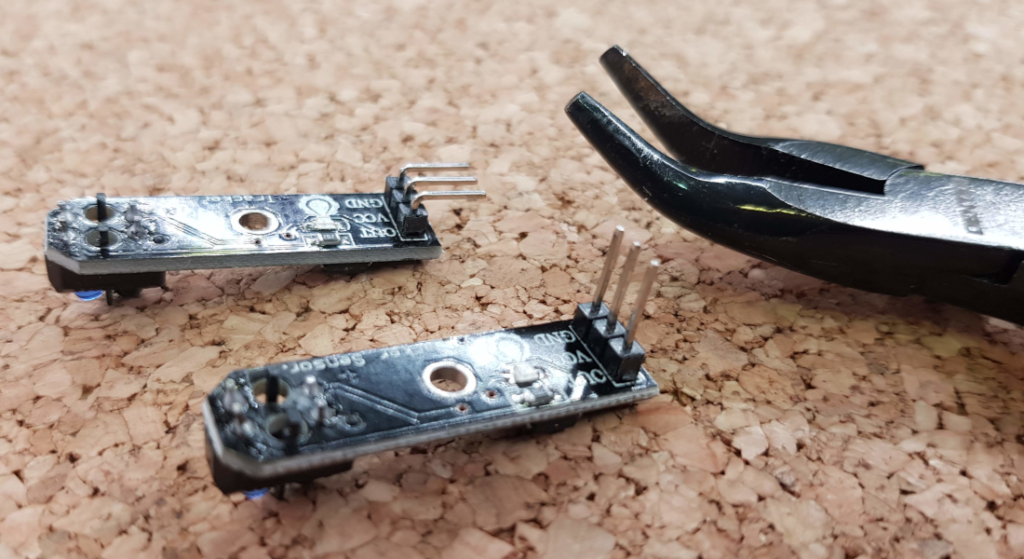
Fuente: https://mclon.org Maria L CC-BY-SA
3.1.2 Recomendaciones

Fuente: https://mclon.org Maria L CC-BY-SA
Pero se puede poner en la placa Protoboard en el paso siguiente sin necesidad de soldar
Se puede usar la banda transparente de plástico para asegurar los cables. Lo aprendí de Eduardo de @Complubot pic.twitter.com/OQEws4Vl75
— javacasm (@javacasm) June 7, 2019
También es conveniente que con un soldador caliente fijes los tornillos en las piezas impresas 3D, te facilitará el montaje (no te pases calentando) o si el orificio es muy grande, usar un pegamento para fijar la tuerca a la pieza 3D:
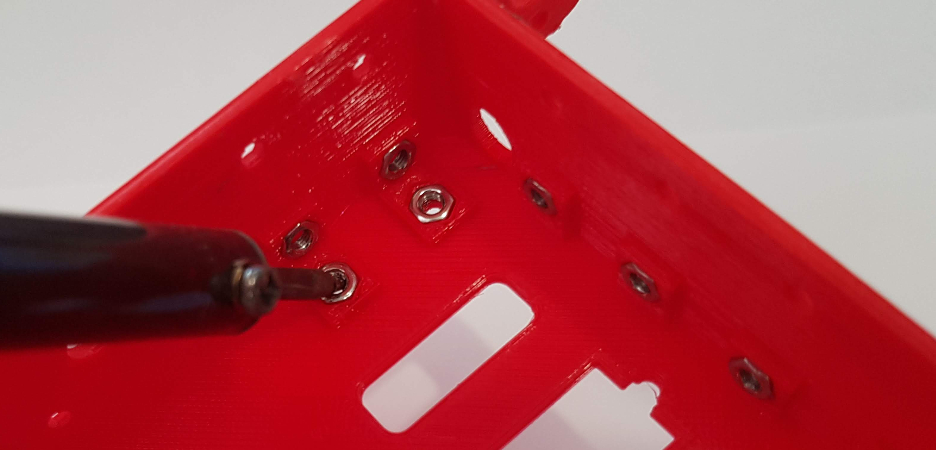
uente: https://mclon.org Maria L CC-BY-SA
3.1.3 Ya realizado por CATEDU
Fuente: https://mclon.org Maria L CC-BY-SA
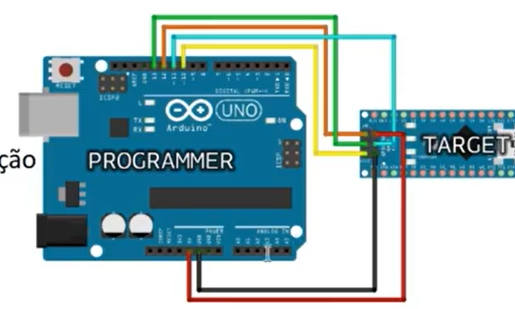
Quemar el bootloader Arduino UnoR3 en el Arduino nano tal y como hemos visto en el capitulo 1
3.1.4 Cosas que no es necesario hacer
En https://tecnoloxia.org/mclon/estrutura/pasos-previos/ dice que hay que soldar los pines Echo y Trg del sensor ultrasónico, esto no es necesario hacerlo pues al tener la placa Protoboard, juntaremos los dos en el miso pin

Fuente: https://mclon.org Maria L CC-BY-SA
Comic Soldar Es Facil Spanish Final by javierbasura on Scribd
3.2 Comenzamos
El montaje de este robot es complejo. En CATEDU hemos intentado ayudar a distancia a quienes han tenido problemas, y es muy difícil hacerlo a distancia, por ello este curso online esta sin tutorización a cambio, si logras montar el robot y que funcione, te lo quedas. No está mal ¿no?

No te desesperes si al final después de montar todo, las pruebas del test del apartado 4 no te funciona, hay que revisar muy bien las conexiones.
Una manera de asegurarte, es ir montando una de estas páginas de este capítulo, y pasar al test correspondiente del capítulo 4, no pasar a la siguiente página sin asegurar el anterior. Como en la figura, se conecta el zumbador y el pulsador, se testea que funcione, y se pasa al siguiente componente:
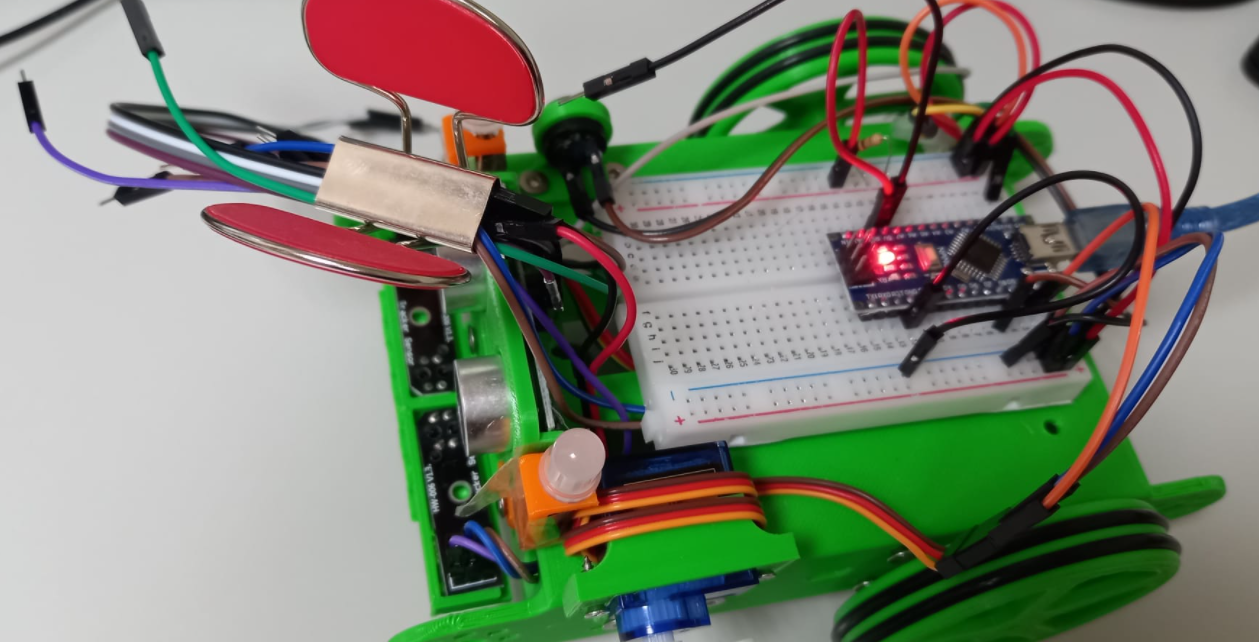
El resultado final tiene su complejidad:
3.2.1 Seguidor sigue líneas y bola loca

Fuente: https://mclon.org Maria L CC-BY-SA
Fuente: https://mclon.org Maria L CC-BY-SA
3.2.2 Sensor ultrasonidos
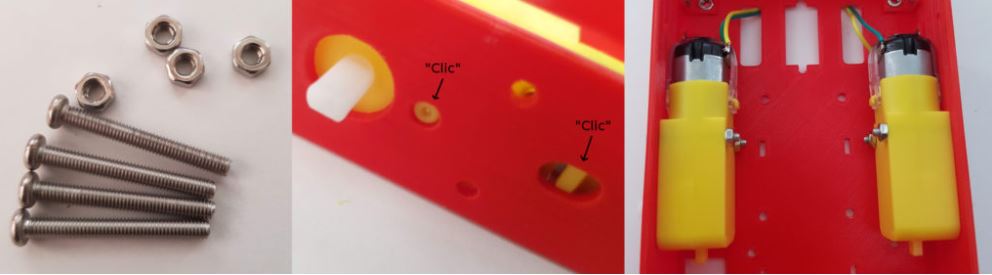
3.2.3 Motores y ruedas
Fuente: https://mclon.org Maria L CC-BY-SA
Fuente: https://mclon.org Maria L CC-BY-SA
3.2.4 placa y accesorios
Pon el soporte del servo al lado izquierdo (mirándolo a los ojos el ultrasonido)
El pulsador lo fijamos con un tornillo de punta o con pegamento de pistola
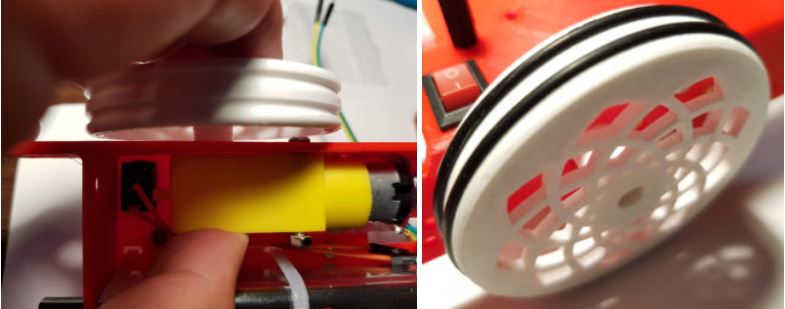
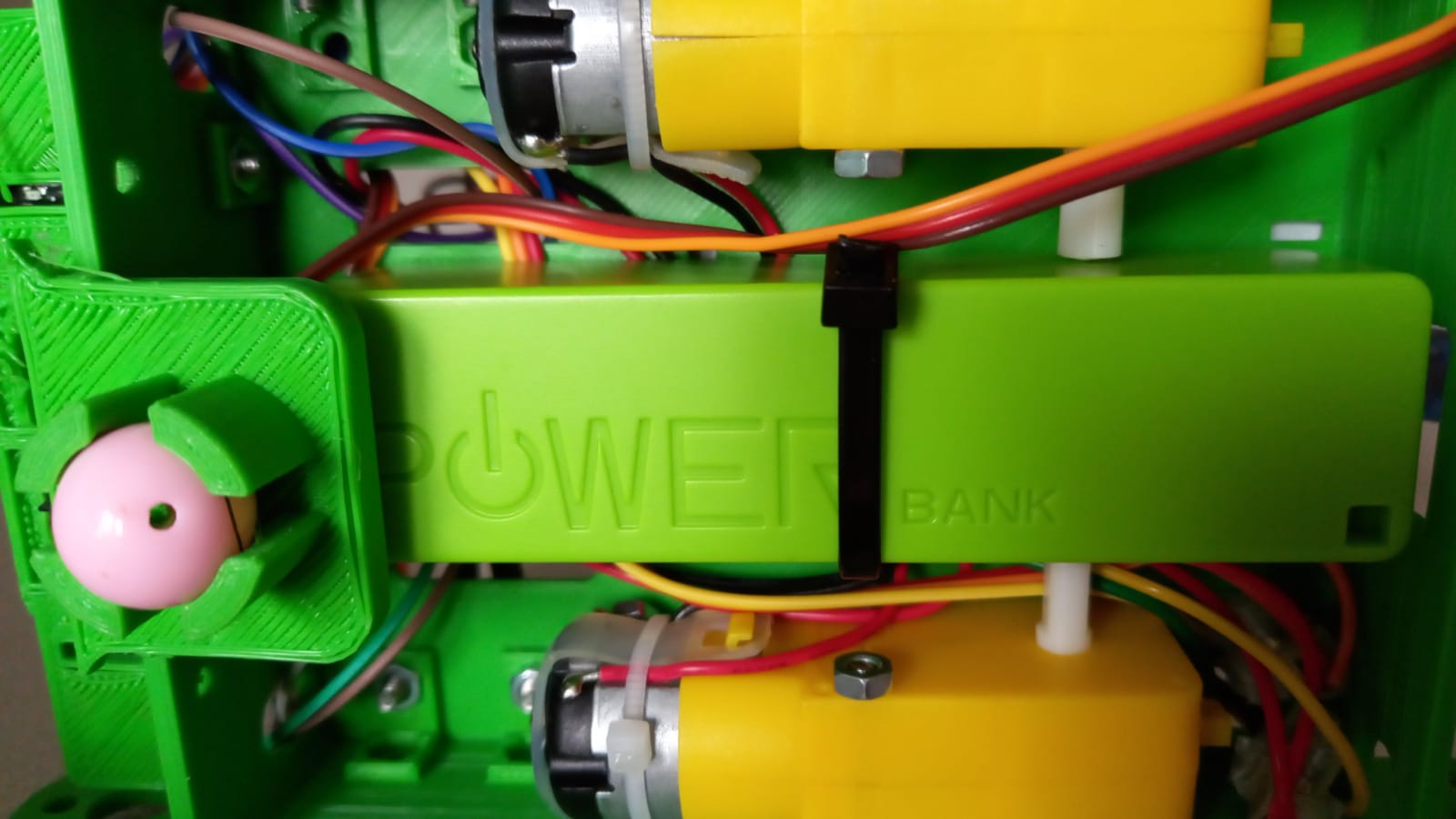
3.2.5 Powerbank
El Powerbank se sujeta muy bien, pues en un extremo tiene el cable USB, en el otro extremo tiene la bola loca, es recomendable que el lado visible del Powerbank sea el que tenga el led que indica la carga (en la foto me he equivocado) :
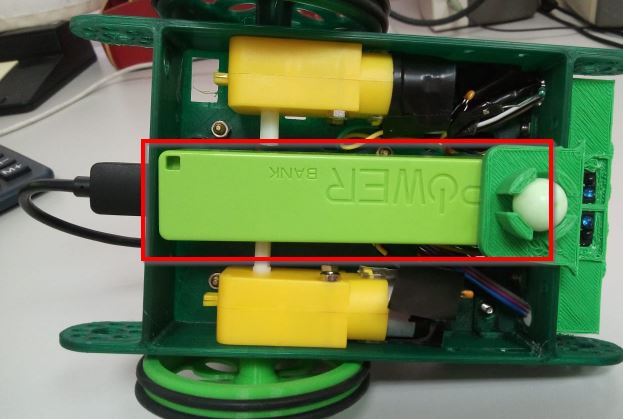
Para fijarlo bien ponemos una brida :
En teoría no hace falta sacarlo nunca :
- Carga: Conectar el cable USB en el orificio microusb

- Conexión y desconexión del mClon por el puerto USB grande

3.2.6 Placa Protoboard

3.3 Cableado esquema
Este es la parte más difícil !!!
Tenemos que conseguir unir los diferentes elementos con los pines del nanoArduino:
- Los pines digitales D0,D1,D2,D3,D4,D5,D6,D7,D8,D9,D10,D11,D12,D13
- Los pines analógicos A0,A1,A2,A3,A4,A5,A6,A7
- Los pines de alimentación GND, VIN
Y tienen que ser estas conexiones y no otras para que sea compatible con mBlock y mBot Ver planos de mBot :
3.3.1.- Tabla de conexiones
Estas son las conexiones al nanoArduino
| PIN | ELEMENTO |
| A0 | |
| A1 | |
| A2 | |
| A3 | PINES ECHO Y TRG DEL SENSOR DE ULTRASONIDOS |
| A4 | |
| A5 | |
| A6 | LDR |
| A7 | PULSADOR |
| D1 | |
| D2 | |
| D3 | |
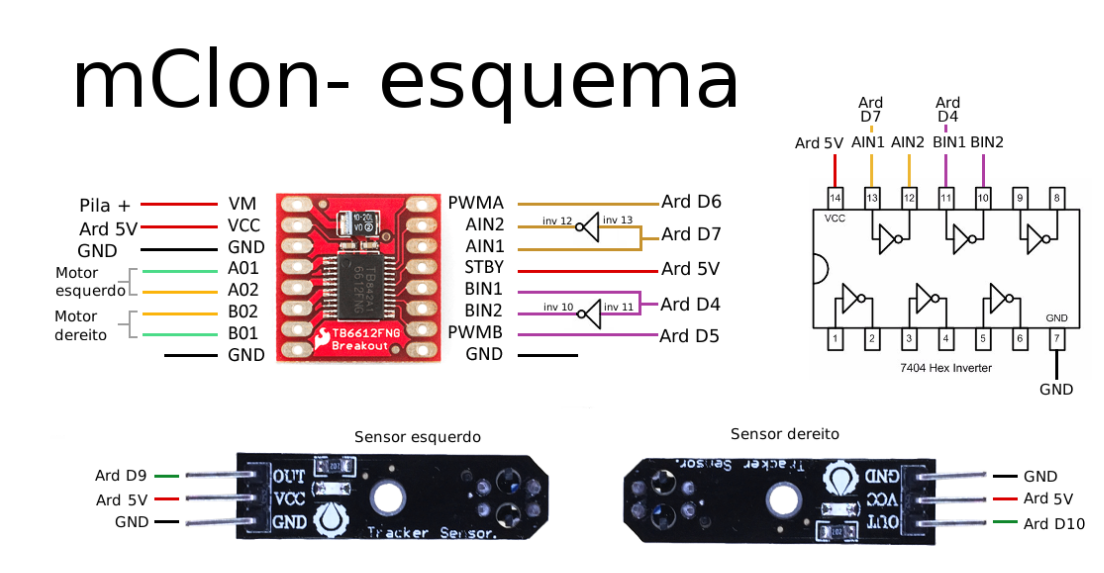
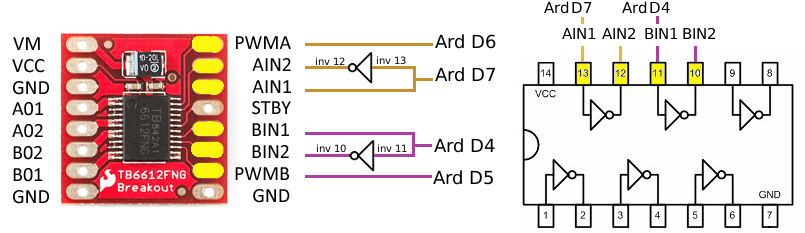
| D4 | Pin BIN1 del driver B6612FNG y en pin 11 del 7404 |
| D5 | Pin PWMB del driver B6612FNG |
| D6 | Pin PWMA del driver B6612FNG |
| D7 | Pin AIN1 del driver B6612FNG y en pin 13 del 7404 |
| D8 | BUZZER |
| D9 | SENSOR IZQUIERDO SIGUELINEAS |
| D10 | SENSOR DERECHO SIGUELINEAS |
| D11 | SERVO DEL BRAZO ROBOT |
| D12 | |
| D13 | LEDS RGB |
Fuente: https://mclon.org Maria L CC-BY-SA
Fuente: https://mclon.org Maria L CC-BY-SA

3.3.3 Esquema accesorios
Fuente: https://mclon.org Maria L CC-BY-SA

Fuente: https://mclon.org Maria L CC-BY-SA
El LDR :
Fuente: Adaptado de https://mclon.org Maria L CC-BY-SA
3.4 Cableado motores
Tenemos la placa protoboard de 400 puntos que están conectados internamente están conectados
- Los pines horizontales superiores e inferiores
- En este tutorial las líneas rojas serán +5V Ard
- Las líneas negras las haremos GND
- Los pines verticales del conjunto de agujeros de arriba (se han marcado 2 líneas azules) no se tocan con las otras del banco de abajo
![2022-03-18 20_10_51-Untitled Sketch 2.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-10-51-untitled-sketch-2-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
Esta placa protoboard cabe muy bien en el chasis pero es justo para nuestros chips :
- Los del driver motor B6612FNG son 8 cada lado
- Los del 7404 son 7 cada lado
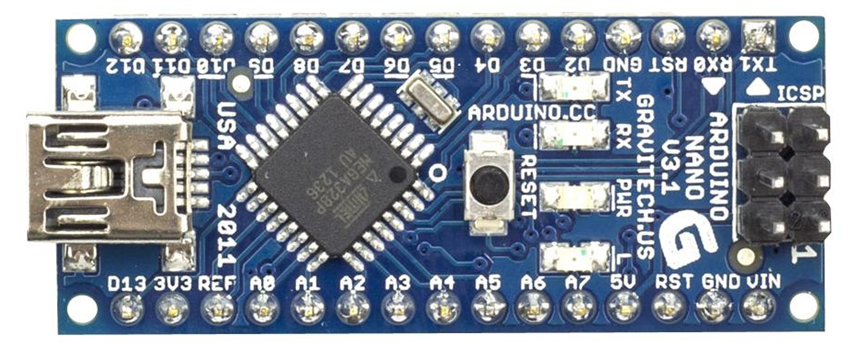
- El arduino nano son 15
En total los 30 no sobra ni falta ninguno :
![2022-03-18 20_14_40-Untitled Sketch.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-14-40-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
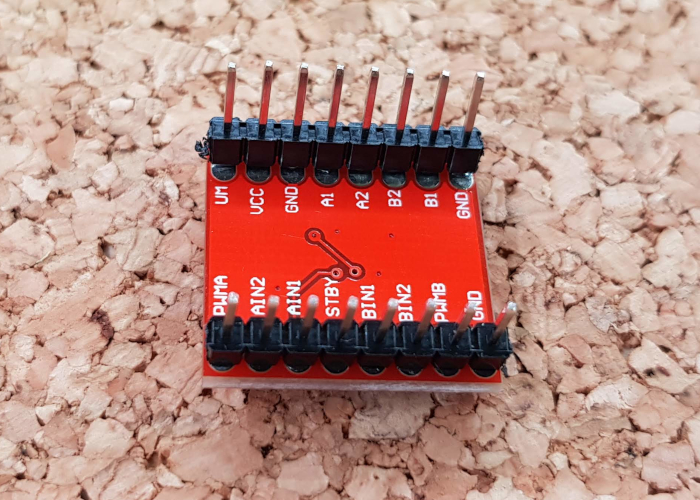
3.4.1 Driver motor B6612FNG y 7404
Primero conectaremos las alimentaciones :

Fuente: https://mclon.org Maria L CC-BY-SA
Al alimentar mClon con PowerBank, la tensión de la pila le llega directamente al Arduino nano, luego alimentamos Vm con los 5V del Arduino

Luego conectando las alimentaciones sería este dibujo, fíjate que hemos conectado un cable exterior para unir las dos líneas de 5V Ard:
![2022-03-18 20_46_15-Untitled Sketch.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-46-15-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
Esta todo muy justo, no sobra pero no falta ninguna de las 30 columnas
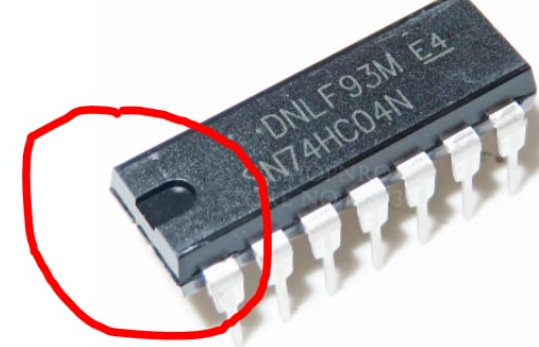
Asegúrate de la posición del 74HC04, la muesca tiene que mirar el Driver motor B6612FNG (el rojo):
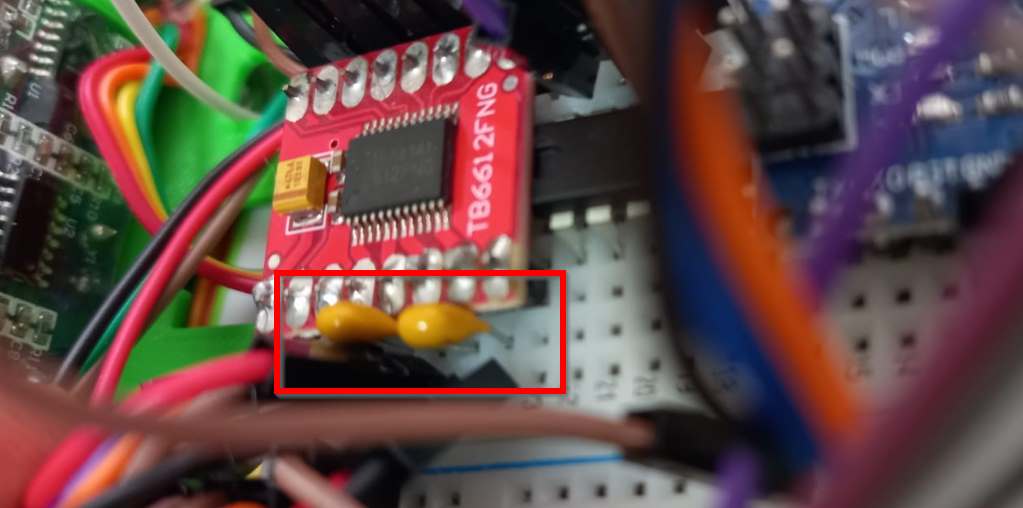
Y ahora conectamos los pines de velocidad y de dirección :
Fuente: https://mclon.org Maria L CC-BY-SA
Es decir, estos cables que indican en la siguiente figura :
ATENCIÓN, no se han dibujado las conexiones anteriores, para simplificar los dibujos, es decir ,no quites los cables anteriores
![2022-03-18 20_28_56-Untitled Sketch.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-28-56-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
![2022-03-18 20_32_59-Untitled Sketch.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-32-59-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
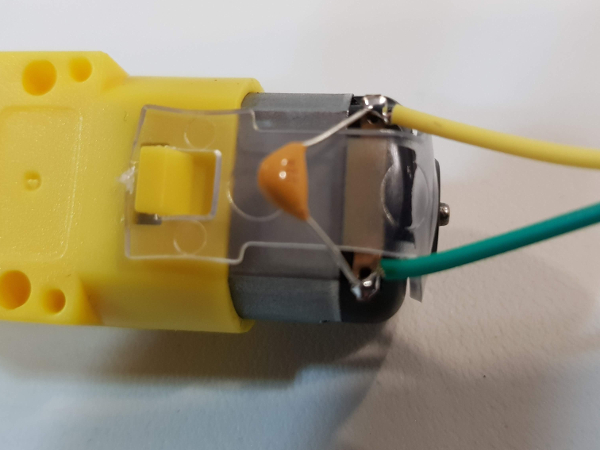
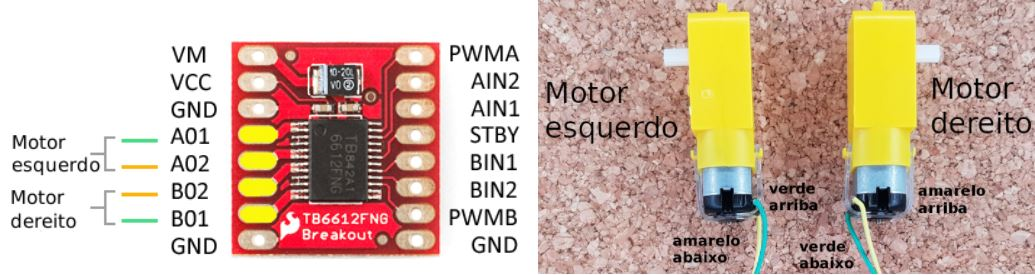
Ahora conectamos los motores OJO CON LA POLARIDAD si te equivocas, el motor girará al revés :
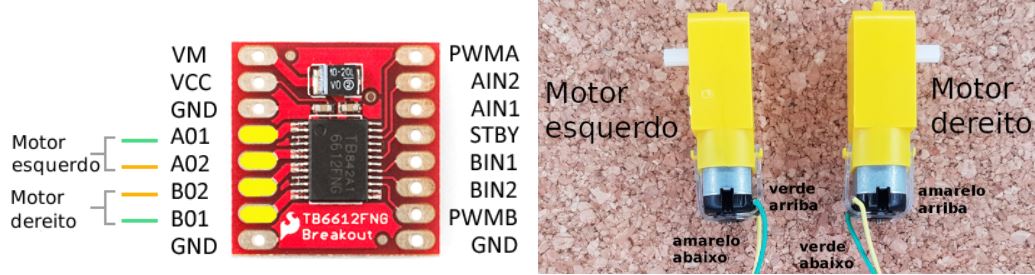
Fuente: https://mclon.org Maria L CC-BY-SA
Aquí podemos poner los condensadores de 0.1µF
![2022-03-21 12_05_54-MCLON.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].jpg](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-21-12-05-54-mclon-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.jpg)
P: ¿Pero a donde conecto el cable verde y amarillo? ¿Amarillos al A02 y B02 y verde A01 y B01 o al revés?
R: El correcto es el de esta imagen, pero realmente no importa mucho, si un motor va al revés, cambia la polaridad.
3.5 Cableado sensores
3.5.1 Sensores de línea
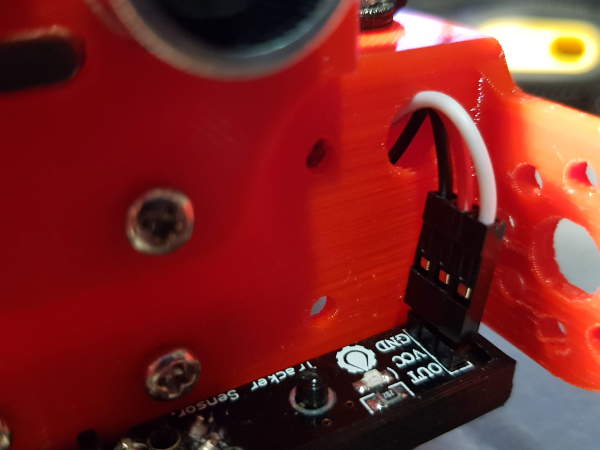
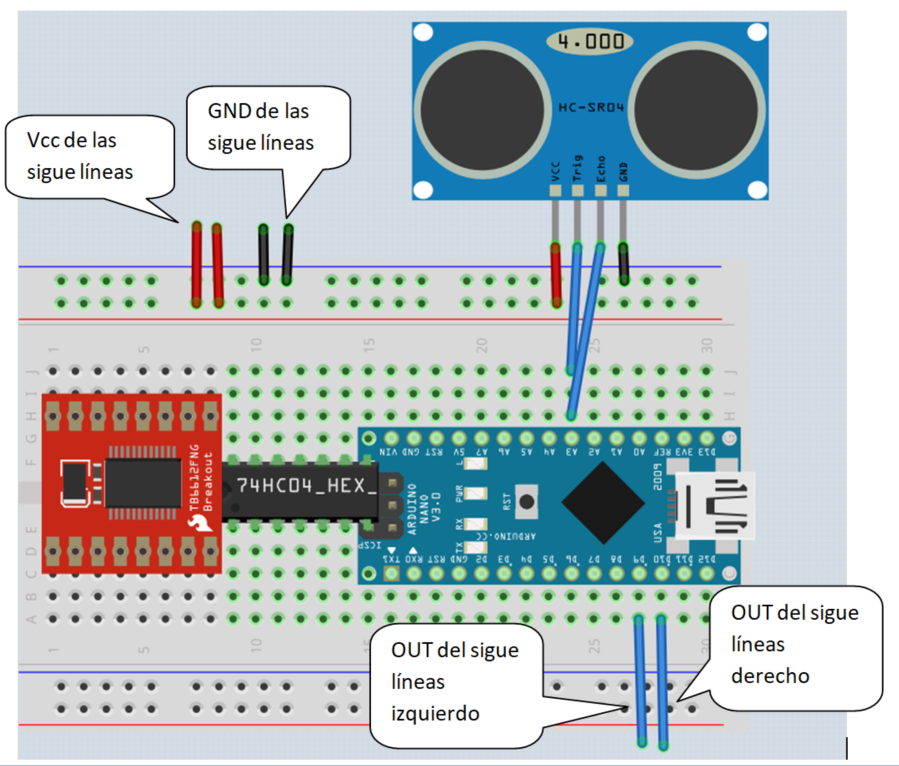
Se colocan en el soporte de la cabeza loca, van justos, incluso puede ser no necesario atornillarlos. Tiene 3 pines:
- GND al GND del Arduino, puede ser cualquier punto libre de la línea horizontal negra del capítulo anterior.
- Vcc al Ard 5V, puede ser cualquier punto libre de la línea horizontal roja vista en la primera figura del capítulo anterior.
- OUT del sensor derecho a D9 mirándolo a los ojos del ultrasonido.
- OUT del sensor izquierdo a D10 mirándolo a los ojos del ultrasonido.

Fuente: https://mclon.org Maria L CC-BY-SA
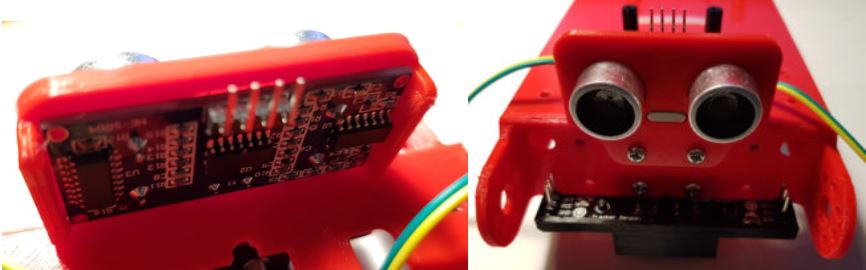
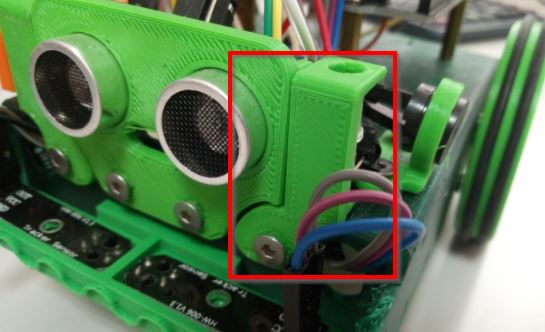
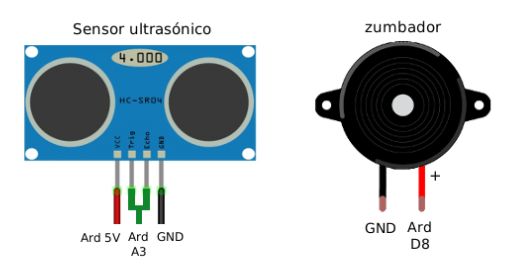
3.5.2 Sensor ultrasonidos
Los pines Trig y Echo del sensor tienen que ir los dos al A3 y conectar Vcc y GND como corresponde. Al final queda :
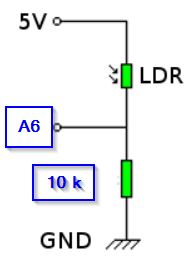
3.5.3 Sensor de luz LDR.
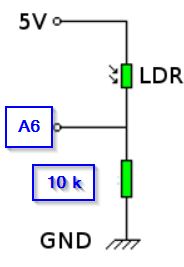
Fuente: Adaptado de https://mclon.org Maria L CC-BY-SA
Luego tenemos que hacer los siguientes empalmes, conectados con ayuda de la placa Protoboard:
- La resistencia 10k a uno de los pines del LDR y al cable que tiene que ir al A6
- Un cable Dupond al otro extremo de la R10k que irá a GND del Arduino.
- Un cable Dupond al otro extremo del LDR que irá al 5V del Arduino.
Luego sería así :
![2022-03-18 21_05_29-Untitled Sketch.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-21-05-29-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
Nuestra propuesta es de sólo un LDR pero recuerda que en el capítulo 2.2 vimos una opción de poner dos LDRs con interesantes propuestas y fácilmente realizable.
3.6 Cableado accesorios
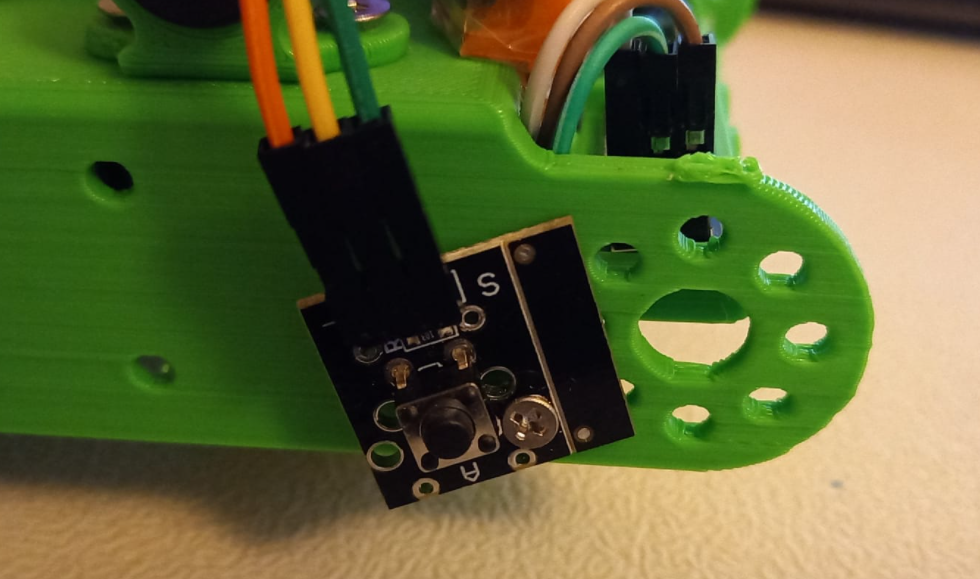
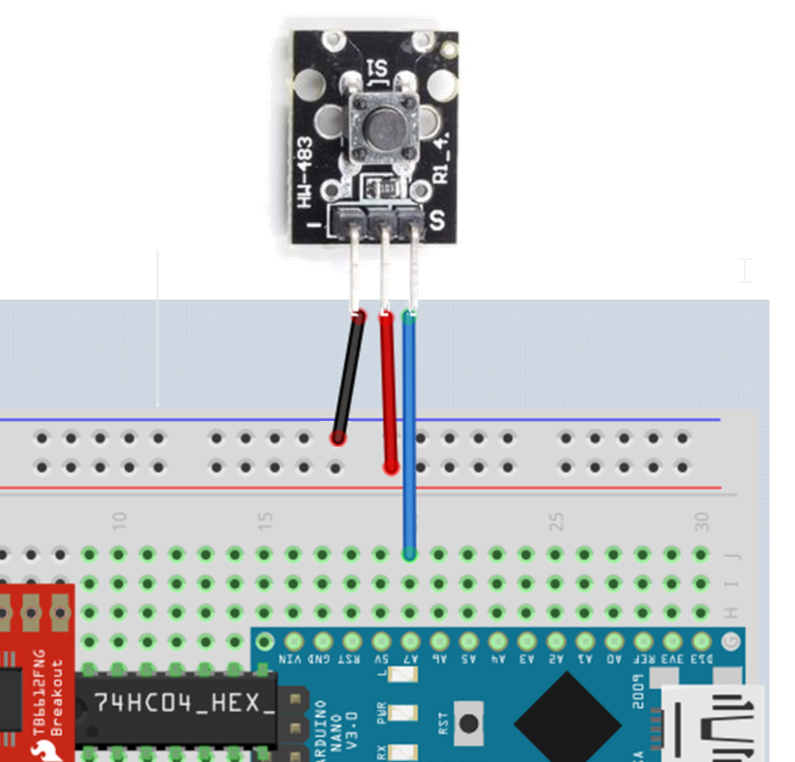
3.6.1 Pulsador
3.6.2 El zumbador
Es sencillo, simplemente conéctalo a D8 y el otro a masa :
![2022-03-21 14_22_17-MCLON.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].jpg](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-21-14-22-17-mclon-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.jpg)
A veces la conexión con los cables Dupont hembra falla, luego recomendamos quitar la caperuza de plástico negra para asegurar la conexión como en la foto.
Otra cosa que nos tenemos que fijar es cual es el + y cual es el - (aunque realmente da igual pues son pasivos)

3.7 Cableado extras
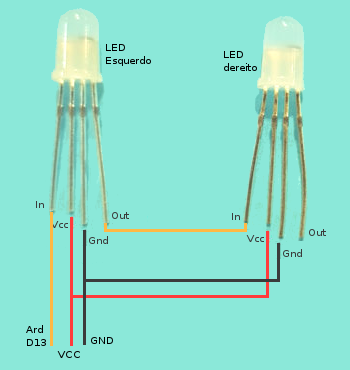
Vamos a utilizar los famosos LED NEOPIXEL, el origen de este nombre es de la compañía ADAFRUIT y son leds de tres colores, que dentro tienen un integrado que permite mandar secuencialmente órdenes a los siguientes, con lo que puedes hacer tiras de leds tan largo como desees y con multitud de posibilidades de juegos de luces disponibles.
En el mClon sólo vamos a trabajar con dos leds, uno recibirá el orden del Arduino por su pata IN,, y se lo comunicará al otro led por su pata OUT al IN del segundo led, y el segundo led, su pata OUT se queda sin conectar pero podríamos seguir la secuencia tanto como quisiéramos.
Si quieres saber más te recomendamos la página de e-Ika y la de Luis Llamas
3.7.1 Aclaración sobre estos leds RGB
Tienes dos tipos FIJATE cual tienes pues el patillaje cambia
- APA 106-F5 de 5mm
- APA 106-F8 de 8mm
Realmente NO SON RGB SINO SON GRB, luego salen cambiados, el ROJO con el VERDE es decir, cuando pides rojo, sale verde y cuando pides verde sale rojo, en el azul está bien
3.7.1.1 APA - F5 de 5mm
Es lo más recomendable, estos leds RGB tienen esta configuración :

Fuente: https://mclon.org Maria L CC-BY-SA

Fuente: Datasheet
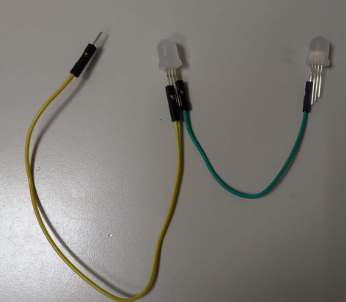
Con cables Dupond y con ayuda de regletas, podemos hacer la siguiente conexiones :
- Los dos Vcc conectados y al Vcc de la placa 5V
- Los dos GND conectados y al GND de la placa 0V
- El Din de un led al pin 13 de la placa Arduino
- El Dout de ese led al Din del otro led
- El Din del otro led sin conectar

Fuente: https://mclon.org Maria L CC-BY-SA
Sujeta las conexiones de los cables Dupond y los leds RGB con cinta aislante para que no se desconecten.
Y los colocas en el chasis en sus soportes :

Fuente: https://mclon.org Maria L CC-BY-SA
Conecta el cable rojo a 5V, el negro a GND y el amarillo al pin 13, y voila !!

Fuente: https://mclon.org Maria L CC-BY-SA
3.7.1.2 APA - F8 de 8mm
En este caso, el led no cabe por el hueco, tienes que ponerlo por encima:

Y su configuración de pines es diferente al APA-106-F5 :

Luego la conexión es :
- Los dos Vcc conectados y al Vcc de la placa 5V
- Los dos GND conectados y al GND de la placa 0V
- El Din de un led al pin 13 de la placa Arduino
- El Dout de ese led al Din del otro led
- El Din del otro led sin conectar


Las regletas nos las podemos ahorrar utilizando diferentes agujeros de la placa Protoboard y la conexión Din-Dout entre los leds con un cable Dupont H-H, en la foto se omiten los cables +5V y GND por simplificar
Una vez conectado, para que los cables Dupond no se salgan, puedes poner una cinta de celo

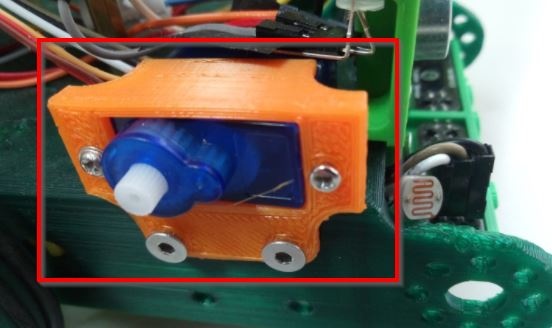
3.7.2 Brazo robot: Servomotor
Coloca el servomotor en su soporte usando los tornillos que vienen en su bolsa:

Fuente: https://mclon.org Maria L CC-BY-SA
Normalmente los colores de los cables del servo tienen este significado :

Fuente: https://mclon.org Maria L CC-BY-SA
Lo uniremos con 3 cables Dupond Macho-Macho y lo fijaremos con cinta aislante :

Fuente: https://mclon.org Maria L CC-BY-SA
Y conectaremos el cable amarillo Señal al pin D11 para poder usar la instrucción (si queremos que sea slot2 o banco2 ponerlo a D12):

Finalmente colocamos el brazo, en el capitulo 4.5 lo calibraremos de forma que
- El ángulo de 0º corresponde a posición horizontal
- El ángulo de 90º corresponde a posición vertical
Una vez identificado cual es el ángulo 90ª ejecutando la instrucción anterior, y una vez puesto el servo en esa posición, poner el brazo levantado con un ligero ángulo hacia delante, tal y como indica la figura :

Fuente: Adaptado de https://mclon.org Maria L CC-BY-SA
Puedes poner un tornillo en para asegurarlo o no ponerlo para quitar el brazo y ponerlo con facilidad para que sea más cómodo el almacenaje del robot.