mClon con nanoArduino
- Introducción
- 1 ¿Cómo es mClon con nanoArduino?
- 2 Propuesta de CATEDU mClon nanoArduino
- 2.1 Opciones
- 2.2 Propuesta mClon vs mBot
- 2.3 Partes impresas
- 2.4 Lista de material
- 2.5 Ojo con las pilas 18650
- 3 Montaje mClon con nanoArduino
- 3.1 Pasos previos
- 3.2 Comenzamos
- 3.3 Cableado esquema
- 3.4 Cableado motores
- 3.5 Cableado sensores
- 3.6 Cableado accesorios
- 3.7 Cableado extras
- 4. Testeo mClon con nanoArduino
- 4.1 Con mBlock
- 4.2 Testeo con mBlock de motores
- 4.3 Testeo con mBlock de los sensores
- 4.4 Testeo con mBlock accesorios
- 4.5 Test de los extras
- 4.6 Testeo con mBlock
- 4.7 Test con IDE
- Muro
- Grupo telegram mClon
- Pensamiento computacional
- Creditos
Introducción

Fuente: https://mclon.org Maria L CC-BY-SA
Tal y como dice https://tecnoloxia.org/mclon/que-e-mclon/
mClon es un robot educativo de bajo costo que imita al mBot y se puede programar con el software mBlock como si fuera un mBot. Está basado en Arduino, por lo que también se puede programar con el IDE de Arduino. Por tanto, es un robot lo suficientemente versátil como para poder adaptarse a múltiples niveles educativos , y está especialmente indicado para trabajar en Educación Secundaria Obligatoria y Bachillerato. Es un proyecto de hardware y software gratuito"
Este tutorial NO explica el funcionamiento del Arduino y su programación, sino el montaje de mClon
OBJETIVOS
- Conocer la filosofía Maker: extensón de la cultura DIY basándose harware y software libre como elementos de enriquecimiento del conocimiento y adaptación y reutilización de diseños publicados.
- Conocimientos básicos y habilidad de montaje en electrónica: placas, cableados, sensores y actuadores.
- Conocer las posibilidades didácticas de los robots Maker: compatiblidad con los comerciales, programación gráfica y programación en código.
CONTENIDOS
- Conocer mClon
- mClon como sustituto de mBot
- La electrónica de mClon
- Concienciación de las diferentes opciones de montaje, sus ventajas e inconvenientes.
- Propuesta de montaje de CATEDU: ventajas e inconvenientes
- Chasis 3D, la alimentación PowerBank y Placa Robodyn
- Extras que se proponen: ventajas didácticas.
- Montaje de mClon
- Preparar el material y adecuarlo
- Ensamblar las piezas en el chasis
- Cableado de los diferentes elementos
- Testeo
- Test con programación gráfica mBlock de los diferentes elementos. Conocer las posibles fallas y su solución.
- Test completo de todos los elementos con programación gráfica.
- Test con programación con código
1 ¿Cómo es mClon con nanoArduino?
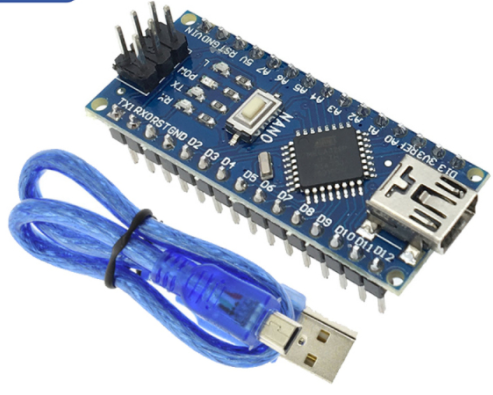
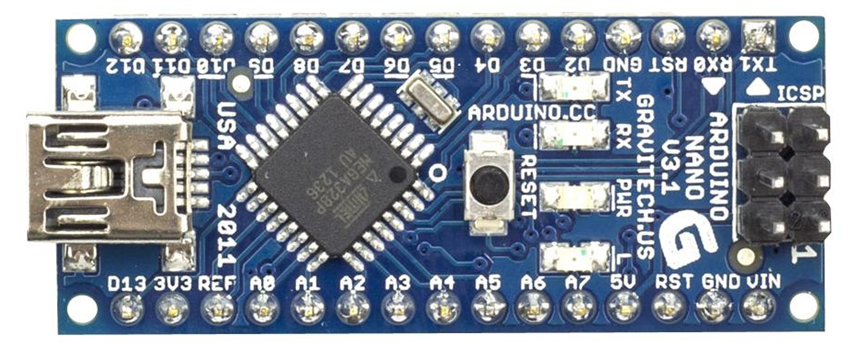
1.1 Placa electrónica nanoArduino
El robot mClon como mBot son sistemas basados en Arduino. La placa controladora es pues un Arduino, pero como veremos en opciones en vez de un Arduino UNO vamos a utilizar un nanoArduino
P: ¿Por qué se utiliza un nanoArduino y no un Arduino normal?
R: Porque para la compatibilidad con mBot se necesita un Arduino con dos I/O Analógicas más el A6 y el A7 para colocar el sensor de luz y el pulsador de abordo.
P: ¿Tiene que ser el nanoArduino necesariamente?
R: No, puede ser el RobotDyn UNO pero últimamente (2022) es muy dificil de conseguir en el mercado. Antes el mClon se hacía con esta placa, ver https://libros.catedu.es/books/regalate-un-mclon/page/11-la-placa-electronica
P: ¿NanoArduino cumple con la condición de ser una placa 100% compatible con mBot?
R: Si, y no, desde el punto de vista del hardware SI que tiene los pines A6 y A7

Fuente Luis Llamas BY-NC-SA https://www.luisllamas.es/esquema-de-patillaje-de-arduino-pinout/
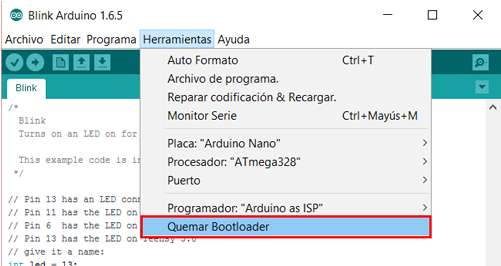
Pero desde el punto de vista del SOFTWARE HAY QUE INSTALAR EL BOOTLOADER DE UNO-R3 EN EN NANO ARDUINO
ESTE PASO LO HA HECHO YA CATEDU EN EL KIT DE PRÉSTAMO, NO LO TIENES QUE HACER TÚ
Aquí tienes un buen tutorial de cómo se hace y qué significa https://www.luisllamas.es/usar-arduino-para-reprogramar-el-bootloader/
Y un vídeo por complementar :
Con una shield en el arduino protoboard :
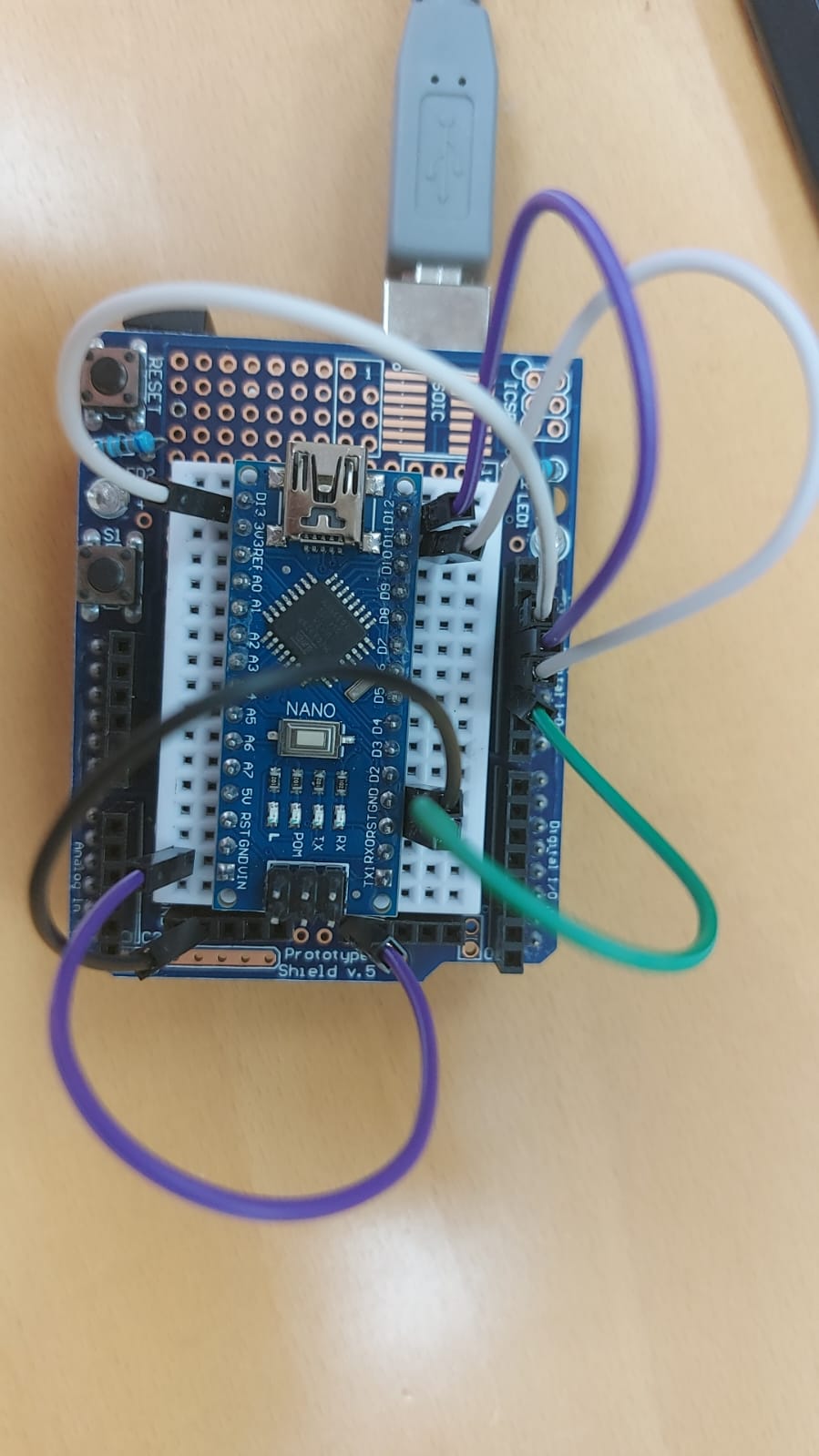
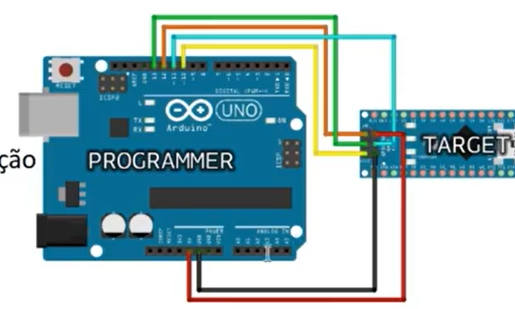
Paso 1: Grabar en el Arduino el programador ArduinoISP de ejemplos
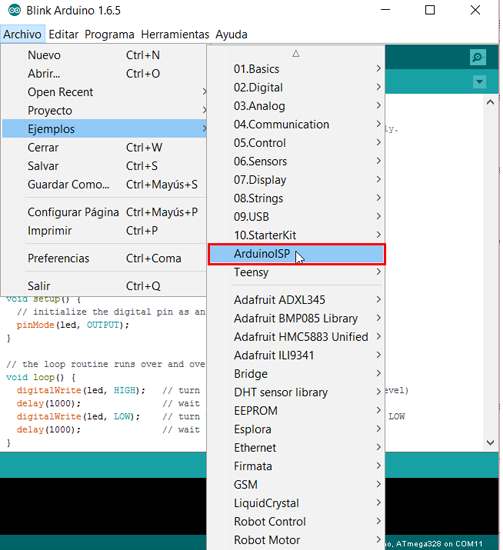
Fuente Arduino Llamas CC-BY-NC-SA https://www.luisllamas.es/usar-arduino-para-reprogramar-el-bootloader/
Paso 2 Programador Arduino como ISP
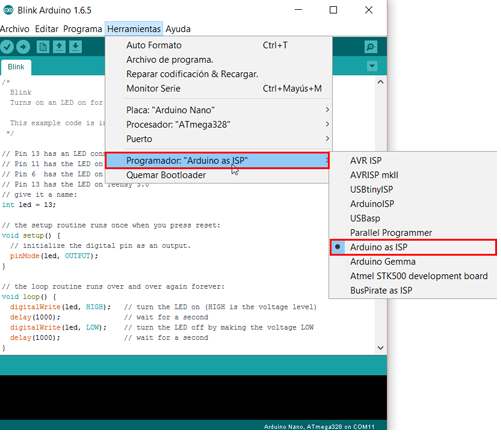
Fuente Arduino Llamas CC-BY-NC-SA https://www.luisllamas.es/usar-arduino-para-reprogramar-el-bootloader/
Paso 3 Quemar
Fuente Arduino Llamas CC-BY-NC-SA https://www.luisllamas.es/usar-arduino-para-reprogramar-el-bootloader/
1.2 Motores
Los motores son de corriente continua sin control de su posición, es decir, sólo podemos controlar su sentido de giro y su potencia.

El control de los motores implicará poner en el escudo Protoboard dos circuitos integrados y su cableado correspondiente, vamos a verlo:
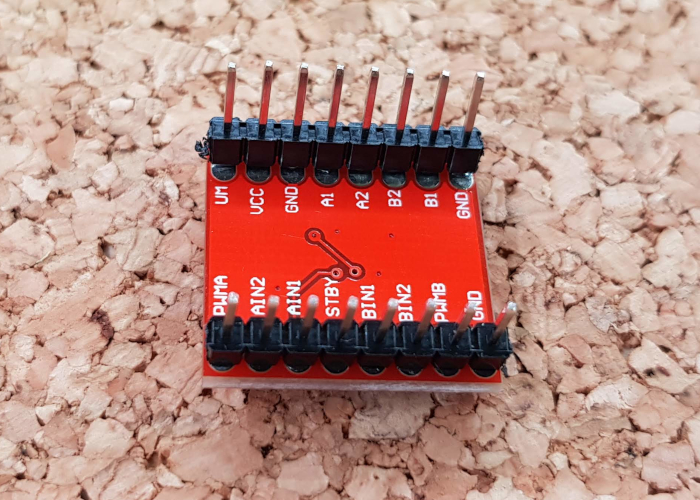
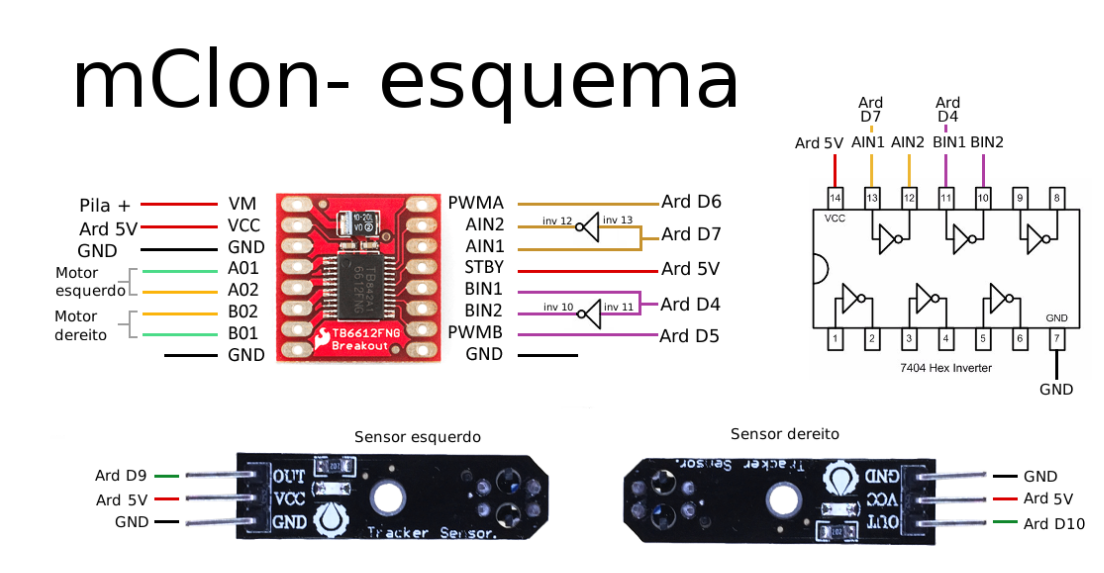
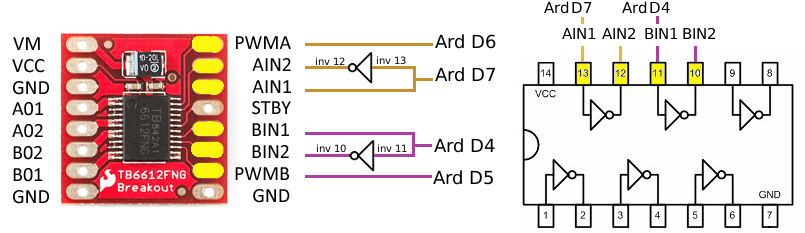
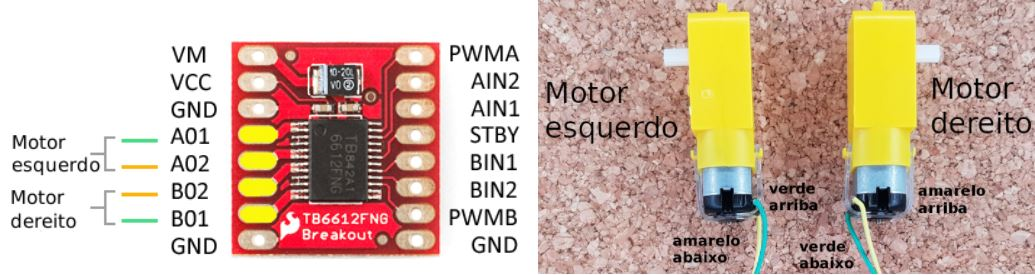
1.2.1.- Driver motor B6612FNG
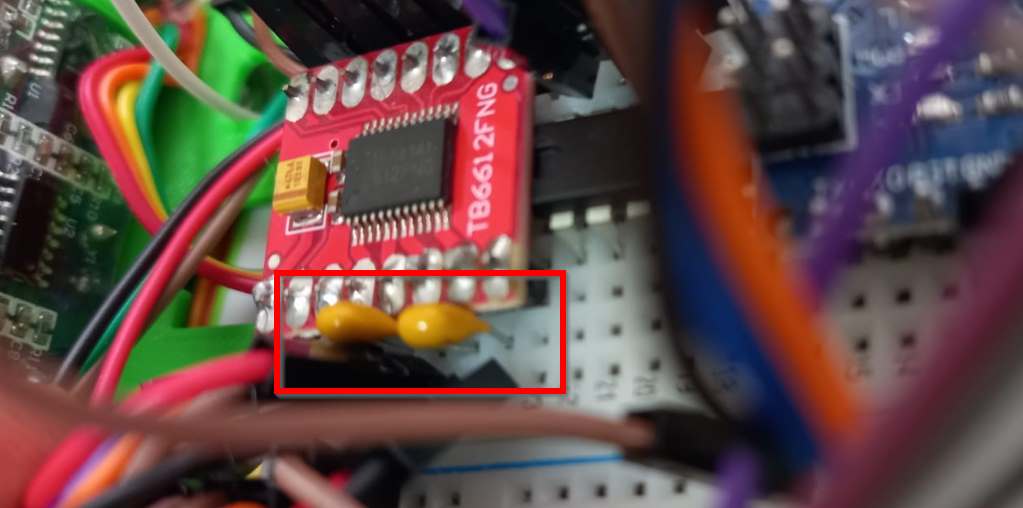
Para realizar el control de los motores, tanto su potencia como su sentido de giro se va a utilizar el controlador TB6612FNG

Fuente: https://mclon.org/ Maria L CC-BY-SA
La potencia de los motores se controla por los pines PWMA y PWMB indicando un valor entre 0 y 255.
1.2.2.- Los giros, una complicación más: 7404
Los giros se controlan con los pines AIN, por ejemplo para el motor A :
| GIRO MOTOR | AIN1 | AIN2 |
| CLOCKWISE (sentido agujas del reloj) | 0 | 1 |
| ANTICLOCKWISE (contrario) | 1 | 0 |
Para no gastar dos pines del Arduino para esta función, un truco consiste en gastar sólo uno, y el otro que sea el inverso de ese mismo. Ese truco es lo que utiliza mBot y si queremos compatibilidad mClon y mBot tenemos que hacerlo.
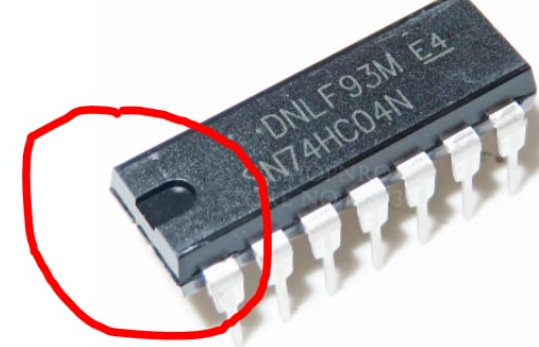
Pero esto implica tener que utilizar un circuito impreso más, el 7404 que tiene 4 inversores :

1.2.3.- Otra opción para los giros
Tal y como dice la página https://tecnoloxia.org/mclon/robotica/o-control-dos-motores/ también se puede utilizar dos transistores y resistencias, (de echo, mBot lo hace así) pero no lo utilizaremos, pues pensamos que es más cómodo el 7404.
1.3 Sensores
1.3.1 Sensor sigue líneas infrarojos
Utilizamos el tracker sensor TCRT5000

Tal y como hemos explicado en Partes impresas no tiene que estar cerca de la línea.
En https://tecnoloxia.org/mclon/robotica/os-sensores-ir-de-lina/ explica muy bien cómo funciona:

Fuente: https://mclon.org/ Maria L CC-BY-SA
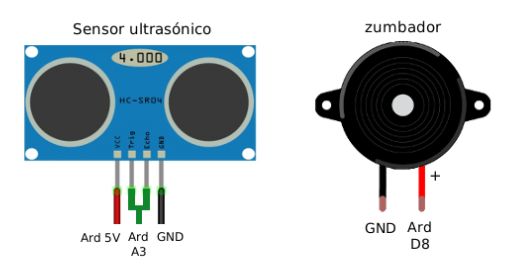
1.3.2 Sensor evita obstáculos ultrasonidos
Se utiliza el sensor HC-SR04

En https://tecnoloxia.org/mclon/robotica/o-sensor-ultrasonico/ explica muy bien cómo funciona:

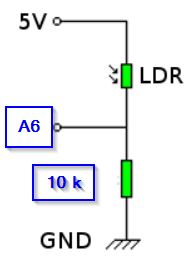
1.3.3 Sensor de luz
Es un LDR que conectado en serie con una resistencia nos proporciona un valor de tensión, pues el LDR varía su resistencia con la luz (a más luz, menos resistencia)

En nuestra propuesta sólo va a tener un LDR, pero se pueden añadir dos LDRs fácilmente, ver 2.2
1.4 Accesorios
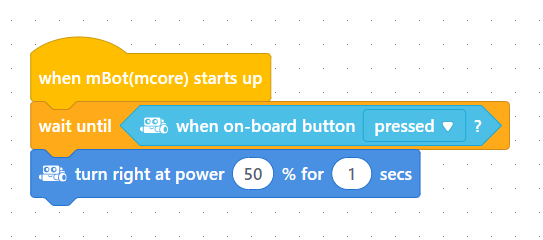
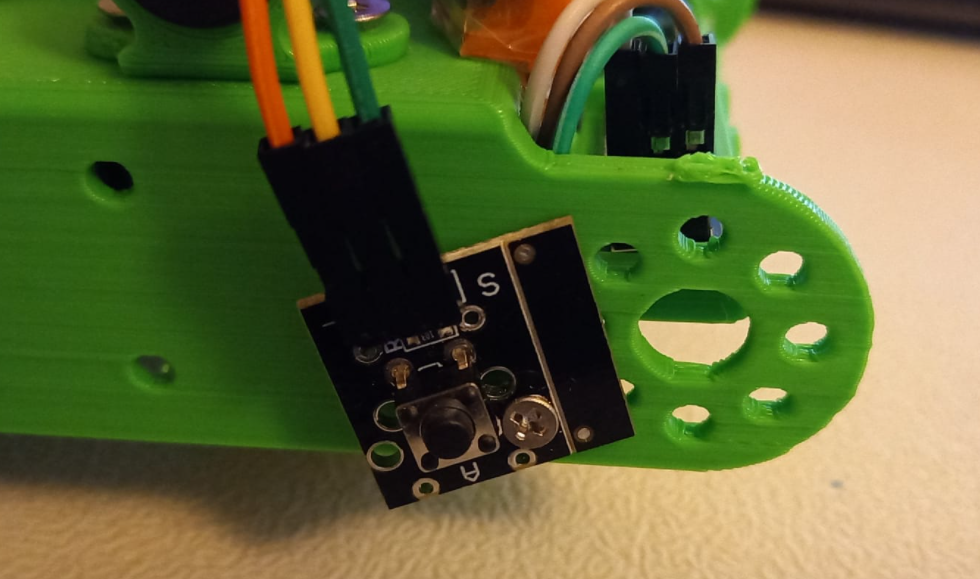
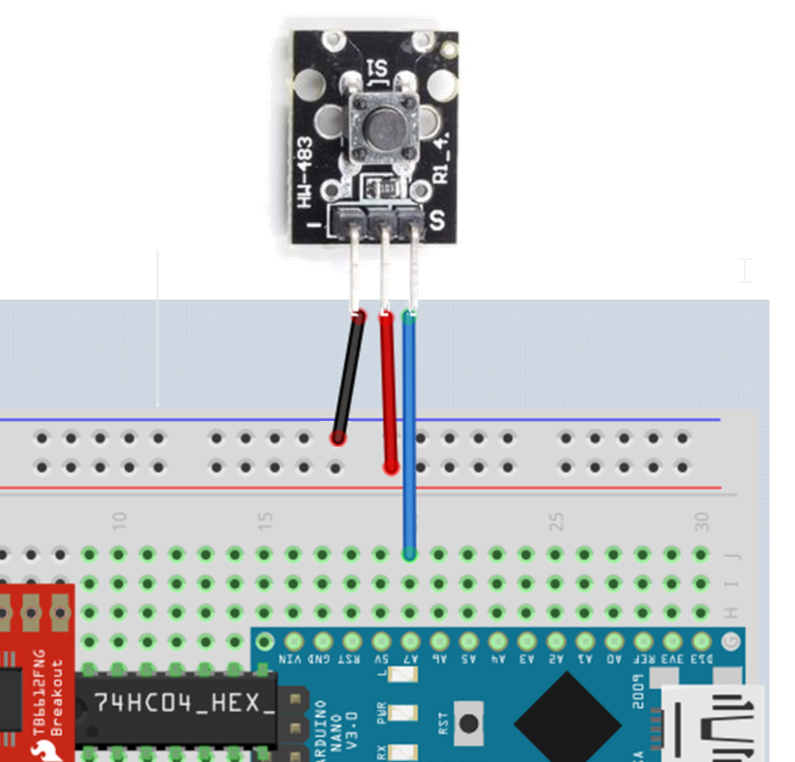
1.4.1 Bóton on board
Este botón es muy útil para dar comienzo a los programas, por ejemplo en el siguiente programa hasta que o aprieto el botón el robot no comienza a dar vueltas :
Si construimos el mClon con la placa Arduino o con la placa Robodyn tiene la ventaja de que se utiliza una shield que ya tiene incorporado un botón.
En nuestro caso tenemos dos opciones, o construirlo nosotros con este esquema :
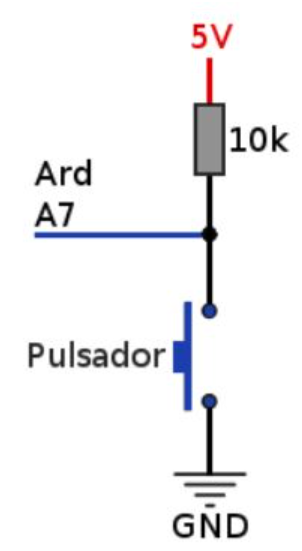
Fuente: https://mclon.org Maria L CC-BY-SA
Tiene la desventaja de tener que dejar un cable suelto y cuando queremos activar el pulsador, tocarlo a masa. Otra opción es utilizar un módulo con botón ya construido y es la opción que hemos elegido
1.4.2 zumbador
Sólo se necesita un zumbador pasivo, es decir, es un simple altavoz, la instrucción de mBlock ya se encarga de reproducir el tono .

La ventaja de ser pasivo es que podemos reproducir diferentes tonos, para saber más ver esta página de Luis Llamas . Un zumbador activo reproduce un tono fijado al suministrarle tensión, para saber más esta página de Luis Llamas.
1.5 Extras
1.5.1 LED RGB
Imitando a mBot, el mClon tiene unos leds RGB que pueden tener diferentes colores.

La instrucción en mBlock permite la combinación de los colores primarios para conseguir la tonalidad que se quiera.

Xa teño LEDs RGB!! Na páxina https://t.co/2cUJy6ivcY podes ver como conectalos e nesta outra https://t.co/Cql4kUmRbt explicamos como funcionan e propoñemos algunhas prácticas pic.twitter.com/vJPyjZ7J6S
— mClon (@mClonRobot) November 3, 2018
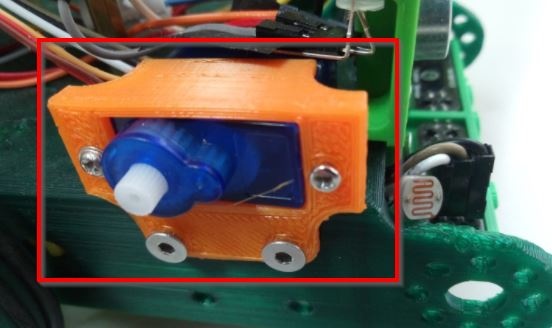
1.5.2 Brazo robótico
Los servomotores son motores que sí tenemos control del giro, es decir, que podemos ordenar que gire un ángulo determinado.
Utilizaremos en mBlock la instrucción (como se conectará al D11 de la placa, es el Slot1, si lo conectaramos al D12 sería el Slot2)

Utilizaremos el servo colocado a un lado para insertar el brazo robótico:

Fuente: https://mclon.org/ Maria L CC-BY-SA
Probando servo. Non hai obstáculo que se me resista! pic.twitter.com/ZiD7XNDZ3l
— mClon (@mClonRobot) November 6, 2018
2 Propuesta de CATEDU mClon nanoArduino
2.1 Opciones
Hay diversas opciones para montar un mClon, todas explicadas en https://tecnoloxia.org/mclon/opcions/ la propuesta de CATEDU es la siguiente:
2.1.1 Chasis

2.1.2 Tarjeta electrónica
2.1.3 Placa protoboard
2.1.4 La alimentación

2.2 Propuesta mClon vs mBot
Accesorios que vienen con el kit básico de mBot incluido en nuestra propuesta mClon
Hay ciertos accesorios y extras que vamos a añadir a nuestro mClon para ser compatible con el mBot comercial :
- Sensor ultrasónico evita obstáculos
- LED RGB dos a cada lado del sensor ultrasónico
- Sensor sigue-líneas. Dos para cada lado de la línea.
- Sensor de luz
- Zumbador

Fuente Makeblock
Accesorios que no vienen con el kit básico mBot pero SI que están en nuestra propuesta mClon
BRAZO
Con mBlock existe la posibilidad de añadir un servo

La propuesta de Catedu es también añadir este extra que le da al mClon unas posibilidades muy creativas :
Accesorios de mBot que NO están contempladas en el paquete mClon de CATEDU
Matriz LED
mBot tiene una matriz de LEDs 8x16 que permite escribir o dibujar

Fuente: Web de Makeblock.es
Para mClon existe una matriz similar 8x8

Pero no es compatible con la instrucciones de mBlock para la matriz:

En vez de estas, hay que instalar una librería MatrixLed y utilizar las instrucciones correspondientes. Sólo compatible con la versión mBlock 3 ya en desuso. Se explica este proceso en https://tecnoloxia.org/mclon/64leds/
Por esta razón NO está en la propuesta de mClon de Catedu.
Dos LDRs
Nuestra propuesta, por simplificar el robot, tiene un LDR conectado al A6 que sería el sensor de luz abordo pero fácilmente se pueden poner dos LDRs uno al A3 y otro al A1 que serían los equivalentes al sensor de luz Puerto3 y el sensor de luz puerto4

Fuente: https://mclon.org Maria L CC-BY-SA
En total se pueden poner hasta 3 LDRs.
En la web https://tecnoloxia.org/mclon/estrutura/impresion-3d/ se pueden imprimir unos soportes especiales :

Fuente: https://mclon.org Maria L CC-BY-SA
Para más info si lo quieres poner ver https://tecnoloxia.org/mclon/accesorios/sensor-de-luz/
Es una propuesta interesante, no lo hemos añadido por simplificar mClon, pero con dos LDRs se pueden hacer cosas interesantes :
O segue luz non e moi espectacular, pero ten dous ....
— mClon (@mClonRobot) November 10, 2018
LDR pic.twitter.com/wNyDp1O5Hp
Un spoiler con cronómetro
Se trata de una pantalla de cuatro dígitos que puede usarse como cronómetro, contador de eventos, etc..

Fuente: https://mclon.org Maria L CC-BY-SA
Para ver cómo se conectaría hay que consultar https://tecnoloxia.org/mclon/accesorios/aleron-cronometro/
Fuera de camino
Esta opción esta documentado también en la Web https://tecnoloxia.org/mclon/accesorios/todoterreo/
Xa falta pouco para que o modelo todoterreo estea documentado na web. Mentres tanto podedes ver como funciona cos dous modelos de oruga, flexible e PLA. pic.twitter.com/svclPqMJYo
— mClon (@mClonRobot) April 21, 2020
Resuelve laberintos
Consiste en cambiar la posición de un siguelíneas para detectar las paredes de enfrente y el sensor ultrasonidos para seguir la pared derecha, en https://tecnoloxia.org/mclon/accesorios/resolve-labirintos/ explica muy bien esta opción y las piezas 3d extras para hacerlo:
Xa resolvo laberintos! Pero, que sexan sinxelos.
— mClon (@mClonRobot) November 16, 2018
Agora documentar e que a xente me replique pic.twitter.com/QrWEvWiHqs
2.3 Partes impresas
En la web https://tecnoloxia.org/mclon/estrutura/impresion-3d/ tenemos la última versión de los modelos 3D para descargarlos y los consejos para su impresión. O también en 3D/Imprimibles3D at master · mClon/3D · GitHub
Todos los ficheros disponibles en https://drive.google.com/drive/folders/1D8vIUNfCDCvM_04RG5HMXtUEGcaBmnTI?usp=sharing
- El Chasis: Chasis_mClon_v2.stl
- El soporte para ultrasonidos, que utilizaremos el simétrico, pues hay HC-SR04 que tienen el condensador de cuarzo arriba y otros abajo: ultrasonico_simetrico.stl
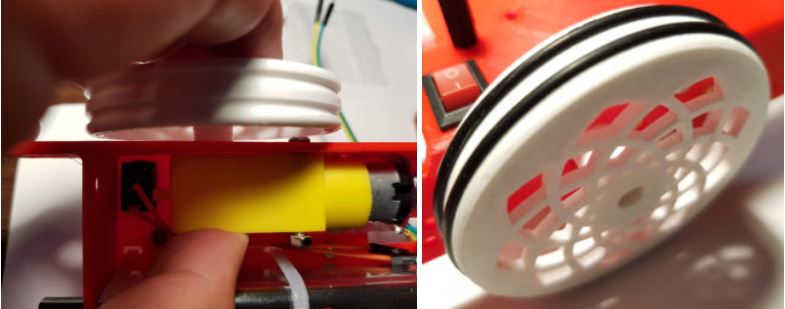
- Ruedas, hay con muchos diseños, muy bien conseguidos, nosotros nos hemos decantado por uno sencillo Roda_5radiosFC.stl
- Soporte zumbador ZumbadorSoporte
- Brazo robótico con sorporte para el servo ServoBrazo.stl
- El led RGB el derecho RGB-der.stl y el izquierdo RGB-esq.stl
2.3.1 ATENCIÓN: EXCEPCIÓN
El soporte de sensor de línea y bola loca, no vamos a utilizar el que propone, pues hemos observado (al menos con nuestros sensores de siguelíneas) que NO detectaban bien las líneas negras y blancas pues estaban los sensores muy cerca del suelo, por lo que hemos cambiado el diseño original subiéndolo al máximo:

El fichero SIGUELINEAS-CATEDU.stl
Esta pieza necesita soportes para su correcta impresión :

2.4 Lista de material
En https://tecnoloxia.org/mclon/material/ tienes diferentes opciones y consejos de compra muy útiles.
La propuesta de Catedu se utilizó esta lista que la iremos actualizando en sucesivas compras.
Las baterías 18650 son peligrosas, no son aptas para que el aulumno lo manipule, por lo que se entrega el powerbank con la pila montada. Esto necesita una explicación aparte en esta página
Si en tu paquete de formación de este robot te falta algo, ya sabes, en www.catedu.es tienes nuestro correo electrónico o nuestro WhatsApp (preferible):

2.5 Ojo con las pilas 18650
Son las baterías que podemos encontrar en los portátiles, coches eléctricos... son de Litio, por lo tanto no tienen el efecto memoria de las Ni-Mh de las pilas recargables y tienen una alta capacidad.
¿Por qué no se utilizan en vez de las pilas recargables si son mejores?
Porque son PELIGROSAS :
EXPLOSIÓN
En este vídeo puedes ver la explosión que se genera por un simple cortocircuito (colocación de un pequeño metal encima), imagínate esta explosión en un recinto cerrado, en una linterna, en un armario... o peor: en clase con el alumnado.
El vídeo es más impresionante : https://www.youtube.com/watch?v=ZTzEHsJVZhA
La 18650 del mClon viene montado dentro de la caja PowerBank
¿Por qué? Por estos peligros, para evitar su manipulación. Si abres la caja powerbank y conectas la batería al revés o dejas que lo manipulen los alumnos es tu responsabilidad.
Si alguna vez quieres reciclar las baterías del portatil, tienes que evitar estos cortocircuitos, su explosión puede causar daños graves ver
Estas baterías no son aptas para que el alumnado los manipule luego en Alphabot ES IMPORTANTE QUE LAS BATERÍAS SÓLO LO MANIPULE EL DOCENTE.
CUIDADO CON NO INTERCAMBIAR LA POLARIDAD
OJO ESTAS PILAS SON PELIGROSAS SI SE CORTOCIRCUITAN O NO SE RESPETA LA POLARIDAD, PUEDEN LLEGAR INCLUSO A EXPLOTAR. Y para complicarlo, no se ve bien (los símbolos + y - de las 18650 soy muy pequeños) y en Alphabot hay una contradicción, los símbolos de fuera en la placa no coinciden con los símbolos de dentro grabados en el portapilas ¿cuales son los verdaderos?: Los de fuera. Para que quede claro aquí tienes un dibujo:
CUIDADO CON LAS COMPRAS
Se pueden encontrar en tiendas online con cargador incluido. pero hay que tener precauciones.No te fies de las muy baratas, pues hay algunas que son falsas, LES PONEN HARINA..
BATERIAS PROTEGIDAS Y NO PROTEGIDAS
¿Qué es eso de la protección? La protección no quiere decir que estas protegido frente a una explosión, sino que están protegidas frente a que se descarguen del todo o esten mucho tiempo cargandose, alargando la vida de la batería. Añaden un chip entre la batería y el exterior que desconecta la batería cuando se alcanza valores críticos tanto por abajo cerca del 0% de carga como por arriba cerca del 100%.
Algunas están protegidas, pero lo normal es que no. Aquí para ver si la pila es protegida o no.
Las del AlphaBot NO ESTAN PROTEGIDAS ¿Por qué? porque las protegidas miden 67mm y no caben tiene que ser de 65 mm.
Las del mClon NO ESTAN PROTEGIDAS ¿Por qué? porque no caben en la caja powerbank, tiene que ser de 65 mm
3 Montaje mClon con nanoArduino
3.1 Pasos previos
Los pasos al detalle lo explica en https://tecnoloxia.org/mclon/estrutura/pasos-previos/ pero con la propuesta de Catedu sólo tenemos que seguir los siguientes pasos:
3.1.1 Lo que tienes que hacer tú
Tienes que doblar los pines de los sensores siguelíneas para que queden perpendiculares al sensor:
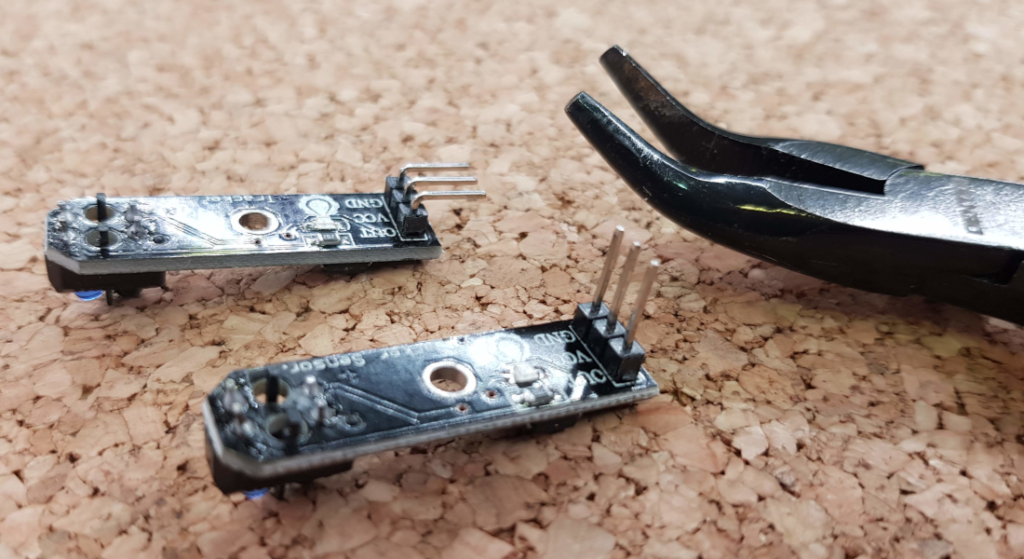
Fuente: https://mclon.org Maria L CC-BY-SA
3.1.2 Recomendaciones

Fuente: https://mclon.org Maria L CC-BY-SA
Pero se puede poner en la placa Protoboard en el paso siguiente sin necesidad de soldar
Se puede usar la banda transparente de plástico para asegurar los cables. Lo aprendí de Eduardo de @Complubot pic.twitter.com/OQEws4Vl75
— javacasm (@javacasm) June 7, 2019
También es conveniente que con un soldador caliente fijes los tornillos en las piezas impresas 3D, te facilitará el montaje (no te pases calentando) o si el orificio es muy grande, usar un pegamento para fijar la tuerca a la pieza 3D:
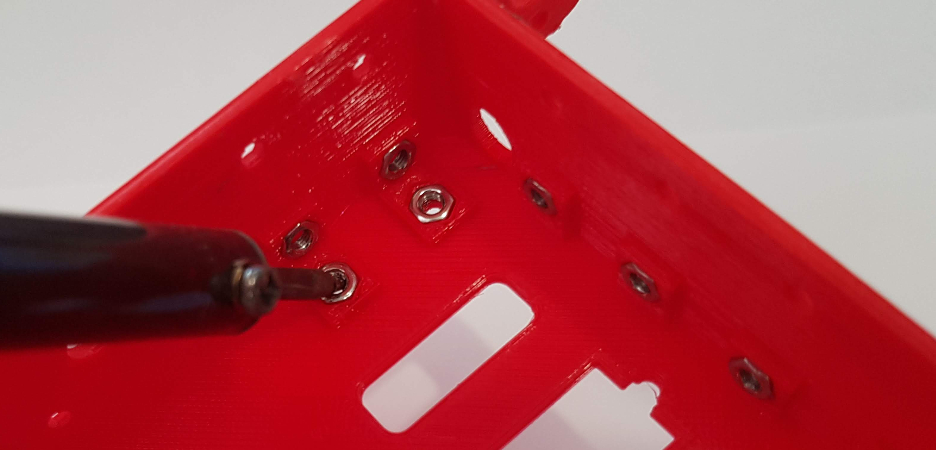
uente: https://mclon.org Maria L CC-BY-SA
3.1.3 Ya realizado por CATEDU
Fuente: https://mclon.org Maria L CC-BY-SA
Quemar el bootloader Arduino UnoR3 en el Arduino nano tal y como hemos visto en el capitulo 1
3.1.4 Cosas que no es necesario hacer
En https://tecnoloxia.org/mclon/estrutura/pasos-previos/ dice que hay que soldar los pines Echo y Trg del sensor ultrasónico, esto no es necesario hacerlo pues al tener la placa Protoboard, juntaremos los dos en el miso pin

Fuente: https://mclon.org Maria L CC-BY-SA
Comic Soldar Es Facil Spanish Final by javierbasura on Scribd
3.2 Comenzamos
El montaje de este robot es complejo. En CATEDU hemos intentado ayudar a distancia a quienes han tenido problemas, y es muy difícil hacerlo a distancia, por ello este curso online esta sin tutorización a cambio, si logras montar el robot y que funcione, te lo quedas. No está mal ¿no?

No te desesperes si al final después de montar todo, las pruebas del test del apartado 4 no te funciona, hay que revisar muy bien las conexiones.
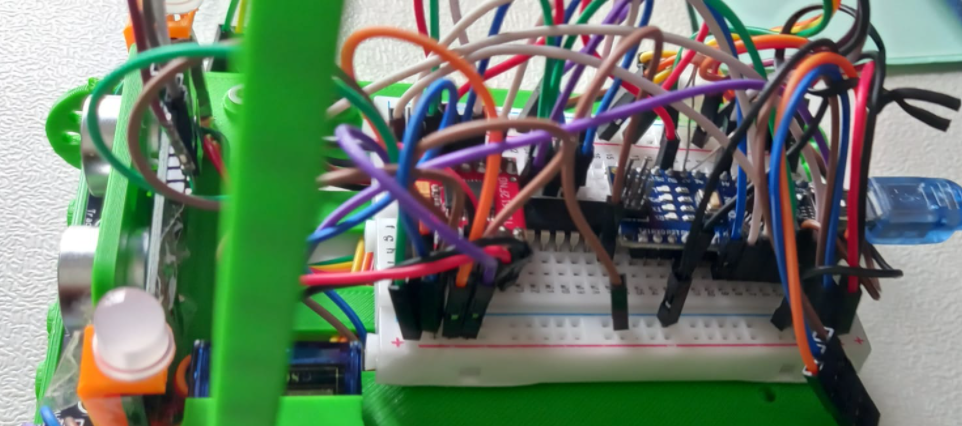
Una manera de asegurarte, es ir montando una de estas páginas de este capítulo, y pasar al test correspondiente del capítulo 4, no pasar a la siguiente página sin asegurar el anterior. Como en la figura, se conecta el zumbador y el pulsador, se testea que funcione, y se pasa al siguiente componente:
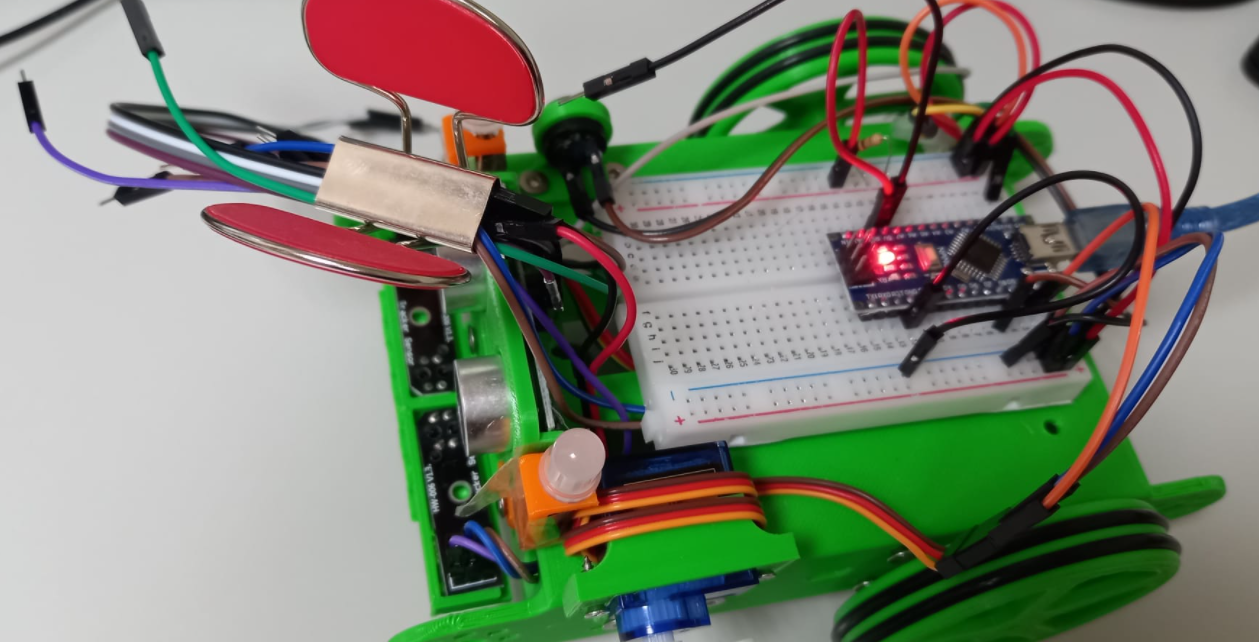
El resultado final tiene su complejidad:
3.2.1 Seguidor sigue líneas y bola loca

Fuente: https://mclon.org Maria L CC-BY-SA
Fuente: https://mclon.org Maria L CC-BY-SA
3.2.2 Sensor ultrasonidos
3.2.3 Motores y ruedas
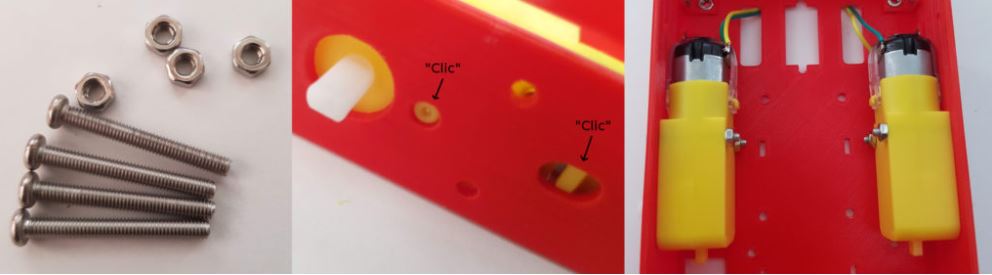
Fuente: https://mclon.org Maria L CC-BY-SA
Fuente: https://mclon.org Maria L CC-BY-SA
3.2.4 placa y accesorios
Pon el soporte del servo al lado izquierdo (mirándolo a los ojos el ultrasonido)
El pulsador lo fijamos con un tornillo de punta o con pegamento de pistola
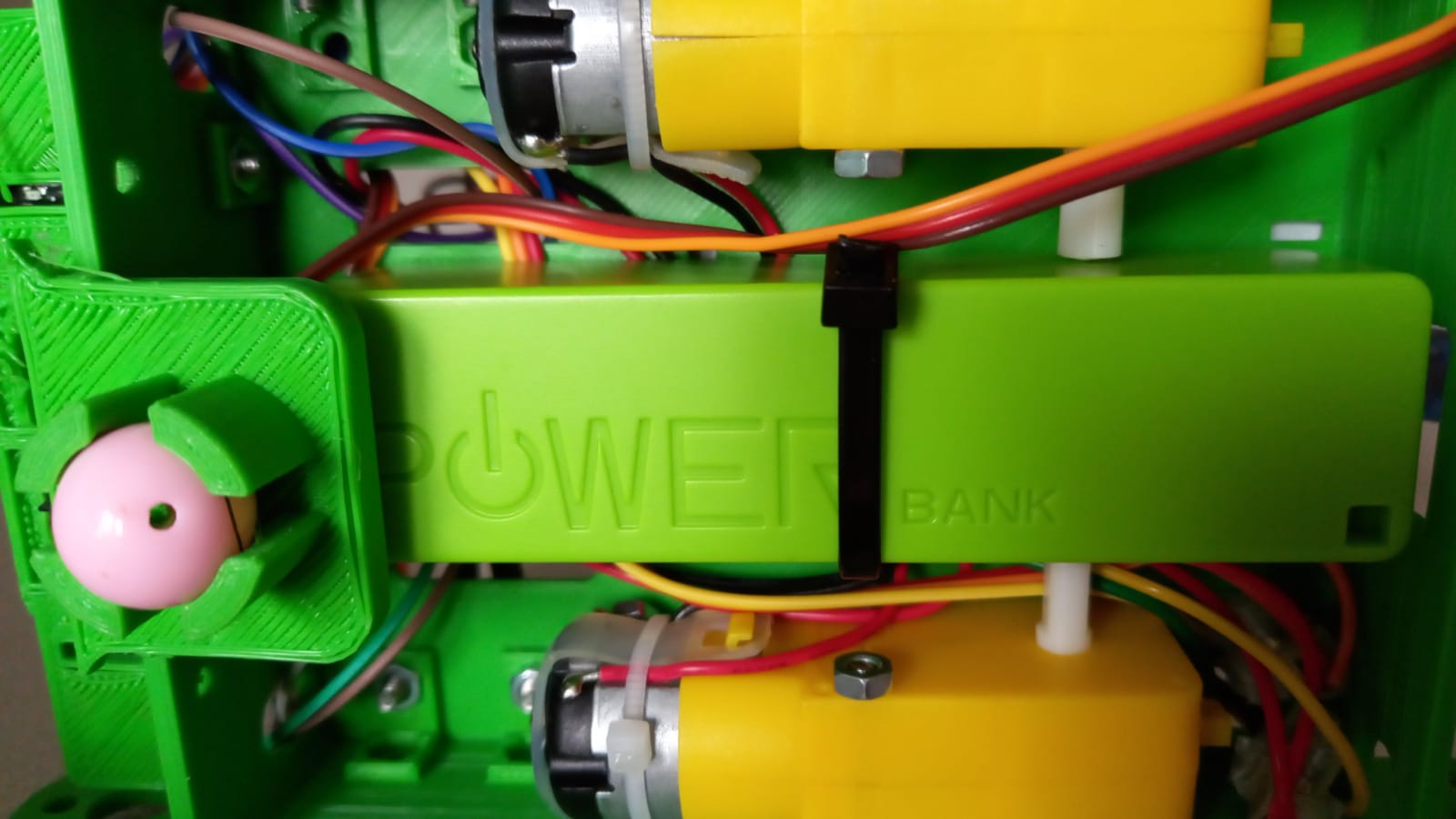
3.2.5 Powerbank
El Powerbank se sujeta muy bien, pues en un extremo tiene el cable USB, en el otro extremo tiene la bola loca, es recomendable que el lado visible del Powerbank sea el que tenga el led que indica la carga (en la foto me he equivocado) :
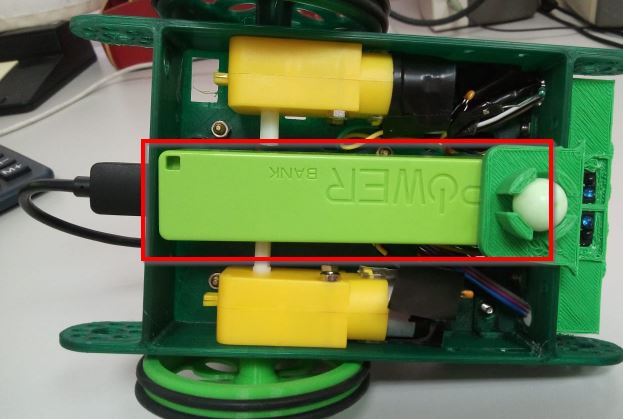
Para fijarlo bien ponemos una brida :
En teoría no hace falta sacarlo nunca :
- Carga: Conectar el cable USB en el orificio microusb

- Conexión y desconexión del mClon por el puerto USB grande

3.2.6 Placa Protoboard

3.3 Cableado esquema
Este es la parte más difícil !!!
Tenemos que conseguir unir los diferentes elementos con los pines del nanoArduino:
- Los pines digitales D0,D1,D2,D3,D4,D5,D6,D7,D8,D9,D10,D11,D12,D13
- Los pines analógicos A0,A1,A2,A3,A4,A5,A6,A7
- Los pines de alimentación GND, VIN
Y tienen que ser estas conexiones y no otras para que sea compatible con mBlock y mBot Ver planos de mBot :
3.3.1.- Tabla de conexiones
Estas son las conexiones al nanoArduino
| PIN | ELEMENTO |
| A0 | |
| A1 | |
| A2 | |
| A3 | PINES ECHO Y TRG DEL SENSOR DE ULTRASONIDOS |
| A4 | |
| A5 | |
| A6 | LDR |
| A7 | PULSADOR |
| D1 | |
| D2 | |
| D3 | |
| D4 | Pin BIN1 del driver B6612FNG y en pin 11 del 7404 |
| D5 | Pin PWMB del driver B6612FNG |
| D6 | Pin PWMA del driver B6612FNG |
| D7 | Pin AIN1 del driver B6612FNG y en pin 13 del 7404 |
| D8 | BUZZER |
| D9 | SENSOR IZQUIERDO SIGUELINEAS |
| D10 | SENSOR DERECHO SIGUELINEAS |
| D11 | SERVO DEL BRAZO ROBOT |
| D12 | |
| D13 | LEDS RGB |
Fuente: https://mclon.org Maria L CC-BY-SA
Fuente: https://mclon.org Maria L CC-BY-SA

3.3.3 Esquema accesorios
Fuente: https://mclon.org Maria L CC-BY-SA

Fuente: https://mclon.org Maria L CC-BY-SA
El LDR :
Fuente: Adaptado de https://mclon.org Maria L CC-BY-SA
3.4 Cableado motores
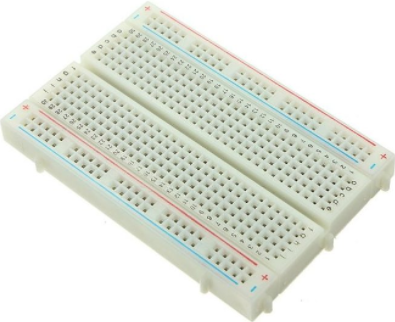
Tenemos la placa protoboard de 400 puntos que están conectados internamente están conectados
- Los pines horizontales superiores e inferiores
- En este tutorial las líneas rojas serán +5V Ard
- Las líneas negras las haremos GND
- Los pines verticales del conjunto de agujeros de arriba (se han marcado 2 líneas azules) no se tocan con las otras del banco de abajo
![2022-03-18 20_10_51-Untitled Sketch 2.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-10-51-untitled-sketch-2-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
Esta placa protoboard cabe muy bien en el chasis pero es justo para nuestros chips :
- Los del driver motor B6612FNG son 8 cada lado
- Los del 7404 son 7 cada lado
- El arduino nano son 15
En total los 30 no sobra ni falta ninguno :
![2022-03-18 20_14_40-Untitled Sketch.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-14-40-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
3.4.1 Driver motor B6612FNG y 7404
Primero conectaremos las alimentaciones :

Fuente: https://mclon.org Maria L CC-BY-SA
Al alimentar mClon con PowerBank, la tensión de la pila le llega directamente al Arduino nano, luego alimentamos Vm con los 5V del Arduino

Luego conectando las alimentaciones sería este dibujo, fíjate que hemos conectado un cable exterior para unir las dos líneas de 5V Ard:
![2022-03-18 20_46_15-Untitled Sketch.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-46-15-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
Esta todo muy justo, no sobra pero no falta ninguna de las 30 columnas
Asegúrate de la posición del 74HC04, la muesca tiene que mirar el Driver motor B6612FNG (el rojo):
Y ahora conectamos los pines de velocidad y de dirección :
Fuente: https://mclon.org Maria L CC-BY-SA
Es decir, estos cables que indican en la siguiente figura :
ATENCIÓN, no se han dibujado las conexiones anteriores, para simplificar los dibujos, es decir ,no quites los cables anteriores
![2022-03-18 20_28_56-Untitled Sketch.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-28-56-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
![2022-03-18 20_32_59-Untitled Sketch.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-32-59-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
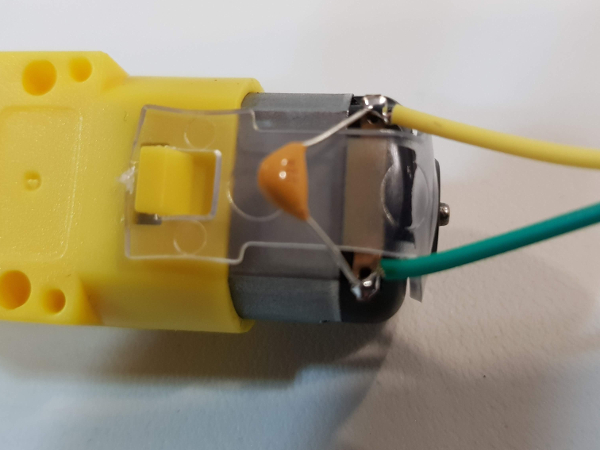
Ahora conectamos los motores OJO CON LA POLARIDAD si te equivocas, el motor girará al revés :
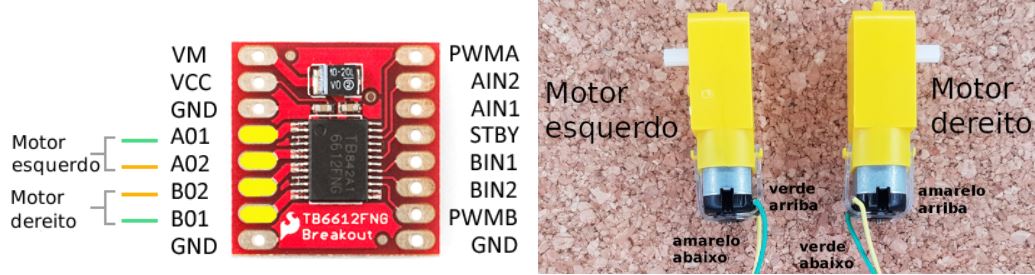
Fuente: https://mclon.org Maria L CC-BY-SA
Aquí podemos poner los condensadores de 0.1µF
![2022-03-21 12_05_54-MCLON.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].jpg](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-21-12-05-54-mclon-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.jpg)
P: ¿Pero a donde conecto el cable verde y amarillo? ¿Amarillos al A02 y B02 y verde A01 y B01 o al revés?
R: El correcto es el de esta imagen, pero realmente no importa mucho, si un motor va al revés, cambia la polaridad.
3.5 Cableado sensores
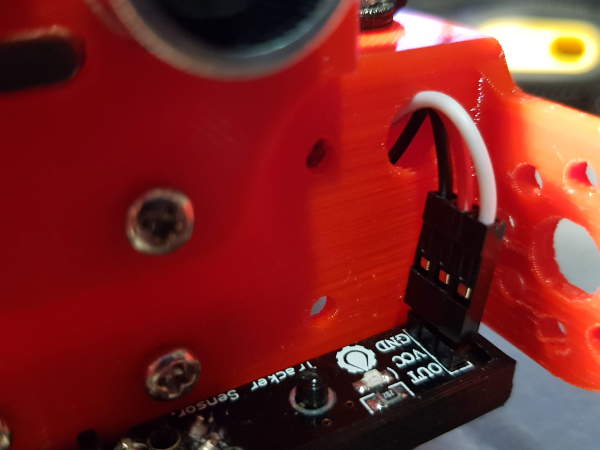
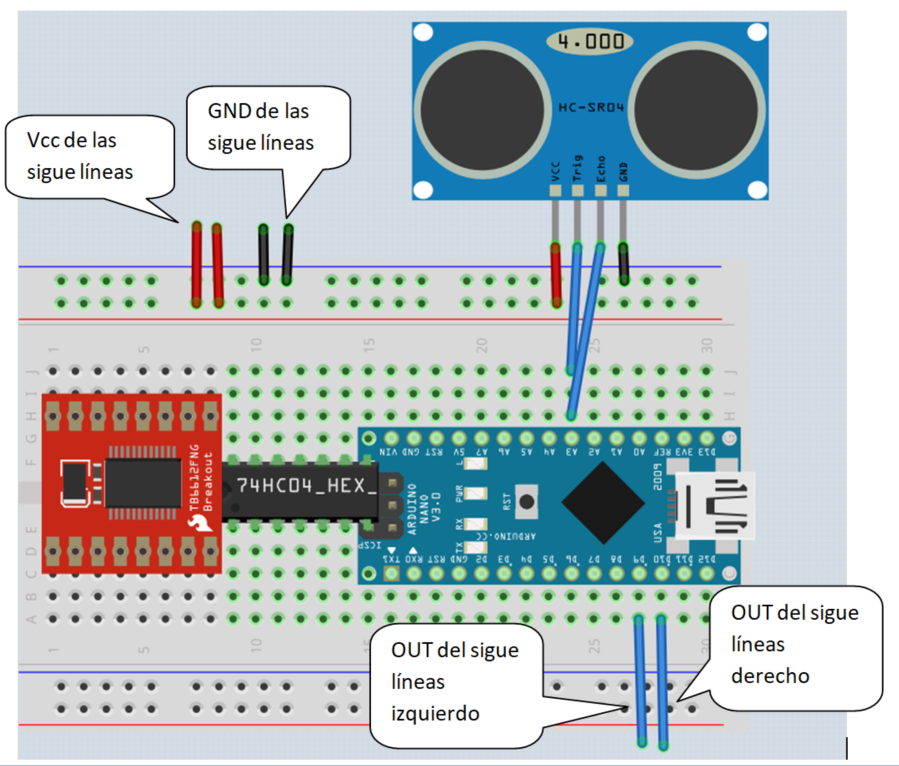
3.5.1 Sensores de línea
Se colocan en el soporte de la cabeza loca, van justos, incluso puede ser no necesario atornillarlos. Tiene 3 pines:
- GND al GND del Arduino, puede ser cualquier punto libre de la línea horizontal negra del capítulo anterior.
- Vcc al Ard 5V, puede ser cualquier punto libre de la línea horizontal roja vista en la primera figura del capítulo anterior.
- OUT del sensor derecho a D9 mirándolo a los ojos del ultrasonido.
- OUT del sensor izquierdo a D10 mirándolo a los ojos del ultrasonido.

Fuente: https://mclon.org Maria L CC-BY-SA
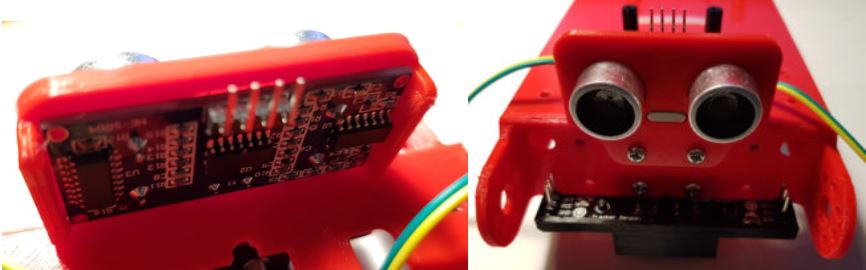
3.5.2 Sensor ultrasonidos
Los pines Trig y Echo del sensor tienen que ir los dos al A3 y conectar Vcc y GND como corresponde. Al final queda :
3.5.3 Sensor de luz LDR.
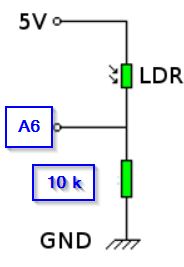
Fuente: Adaptado de https://mclon.org Maria L CC-BY-SA
Luego tenemos que hacer los siguientes empalmes, conectados con ayuda de la placa Protoboard:
- La resistencia 10k a uno de los pines del LDR y al cable que tiene que ir al A6
- Un cable Dupond al otro extremo de la R10k que irá a GND del Arduino.
- Un cable Dupond al otro extremo del LDR que irá al 5V del Arduino.
Luego sería así :
![2022-03-18 21_05_29-Untitled Sketch.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-21-05-29-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
Nuestra propuesta es de sólo un LDR pero recuerda que en el capítulo 2.2 vimos una opción de poner dos LDRs con interesantes propuestas y fácilmente realizable.
3.6 Cableado accesorios
3.6.1 Pulsador
3.6.2 El zumbador
Es sencillo, simplemente conéctalo a D8 y el otro a masa :
![2022-03-21 14_22_17-MCLON.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].jpg](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-21-14-22-17-mclon-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.jpg)
A veces la conexión con los cables Dupont hembra falla, luego recomendamos quitar la caperuza de plástico negra para asegurar la conexión como en la foto.
Otra cosa que nos tenemos que fijar es cual es el + y cual es el - (aunque realmente da igual pues son pasivos)

3.7 Cableado extras
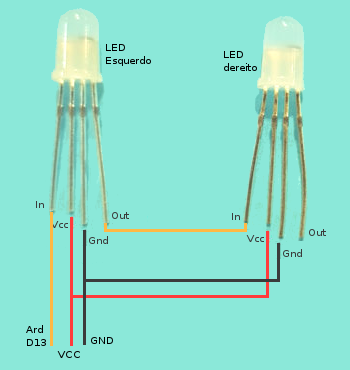
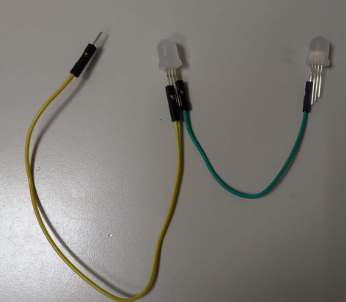
Vamos a utilizar los famosos LED NEOPIXEL, el origen de este nombre es de la compañía ADAFRUIT y son leds de tres colores, que dentro tienen un integrado que permite mandar secuencialmente órdenes a los siguientes, con lo que puedes hacer tiras de leds tan largo como desees y con multitud de posibilidades de juegos de luces disponibles.
En el mClon sólo vamos a trabajar con dos leds, uno recibirá el orden del Arduino por su pata IN,, y se lo comunicará al otro led por su pata OUT al IN del segundo led, y el segundo led, su pata OUT se queda sin conectar pero podríamos seguir la secuencia tanto como quisiéramos.
Si quieres saber más te recomendamos la página de e-Ika y la de Luis Llamas
3.7.1 Aclaración sobre estos leds RGB
Tienes dos tipos FIJATE cual tienes pues el patillaje cambia
- APA 106-F5 de 5mm
- APA 106-F8 de 8mm
Realmente NO SON RGB SINO SON GRB, luego salen cambiados, el ROJO con el VERDE es decir, cuando pides rojo, sale verde y cuando pides verde sale rojo, en el azul está bien
3.7.1.1 APA - F5 de 5mm
Es lo más recomendable, estos leds RGB tienen esta configuración :

Fuente: https://mclon.org Maria L CC-BY-SA

Fuente: Datasheet
Con cables Dupond y con ayuda de regletas, podemos hacer la siguiente conexiones :
- Los dos Vcc conectados y al Vcc de la placa 5V
- Los dos GND conectados y al GND de la placa 0V
- El Din de un led al pin 13 de la placa Arduino
- El Dout de ese led al Din del otro led
- El Din del otro led sin conectar

Fuente: https://mclon.org Maria L CC-BY-SA
Sujeta las conexiones de los cables Dupond y los leds RGB con cinta aislante para que no se desconecten.
Y los colocas en el chasis en sus soportes :

Fuente: https://mclon.org Maria L CC-BY-SA
Conecta el cable rojo a 5V, el negro a GND y el amarillo al pin 13, y voila !!

Fuente: https://mclon.org Maria L CC-BY-SA
3.7.1.2 APA - F8 de 8mm
En este caso, el led no cabe por el hueco, tienes que ponerlo por encima:

Y su configuración de pines es diferente al APA-106-F5 :

Luego la conexión es :
- Los dos Vcc conectados y al Vcc de la placa 5V
- Los dos GND conectados y al GND de la placa 0V
- El Din de un led al pin 13 de la placa Arduino
- El Dout de ese led al Din del otro led
- El Din del otro led sin conectar


Las regletas nos las podemos ahorrar utilizando diferentes agujeros de la placa Protoboard y la conexión Din-Dout entre los leds con un cable Dupont H-H, en la foto se omiten los cables +5V y GND por simplificar
Una vez conectado, para que los cables Dupond no se salgan, puedes poner una cinta de celo

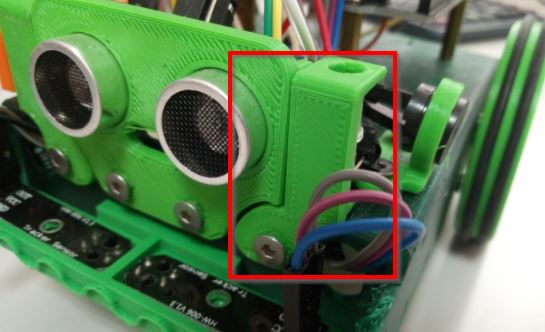
3.7.2 Brazo robot: Servomotor
Coloca el servomotor en su soporte usando los tornillos que vienen en su bolsa:

Fuente: https://mclon.org Maria L CC-BY-SA
Normalmente los colores de los cables del servo tienen este significado :

Fuente: https://mclon.org Maria L CC-BY-SA
Lo uniremos con 3 cables Dupond Macho-Macho y lo fijaremos con cinta aislante :

Fuente: https://mclon.org Maria L CC-BY-SA
Y conectaremos el cable amarillo Señal al pin D11 para poder usar la instrucción (si queremos que sea slot2 o banco2 ponerlo a D12):
Finalmente colocamos el brazo, en el capitulo 4.5 lo calibraremos de forma que
- El ángulo de 0º corresponde a posición horizontal
- El ángulo de 90º corresponde a posición vertical
Una vez identificado cual es el ángulo 90ª ejecutando la instrucción anterior, y una vez puesto el servo en esa posición, poner el brazo levantado con un ligero ángulo hacia delante, tal y como indica la figura :

Fuente: Adaptado de https://mclon.org Maria L CC-BY-SA
Puedes poner un tornillo en para asegurarlo o no ponerlo para quitar el brazo y ponerlo con facilidad para que sea más cómodo el almacenaje del robot.
4. Testeo mClon con nanoArduino
4.1 Con mBlock
Este tutorial no es un tutorial de programación de mBlock sólo se muestran algunas líneas principales de recordatorio. Recomendamos visitar los tutoriales de mBot en www.catedu.es en Robótica los correspondiente a mBot.
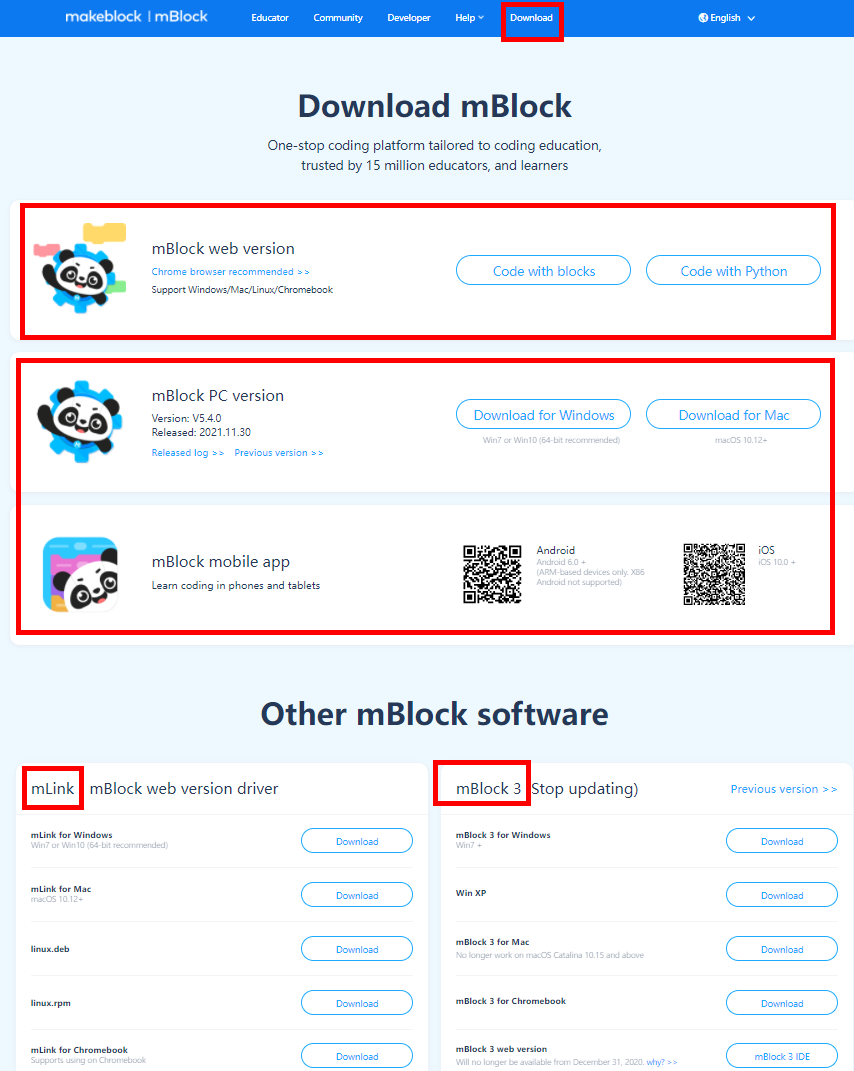
Para entrar en el programa mBlock tienes que entrar en http://www.mblock.cc/ en Download y tienes varias opciones:
- Online versión Web tiene la ventaja de tener tus programas en la nube si te registras pero dependes de la conexión de Internet en su uso en el aula.
Hay que descargar previamente el driver mLink y ejecutarlo,. Lo encontrarás en la misma página - Offline descargando el programa en http://www.mblock.cc/ en Download
- Para equipos viejos, incluso con Windows XP recomendamos la versión 3
- Para PC, la versión 5 tienes varias opciones en Windows, Mac o Tablets. En Linux usa la versión web.
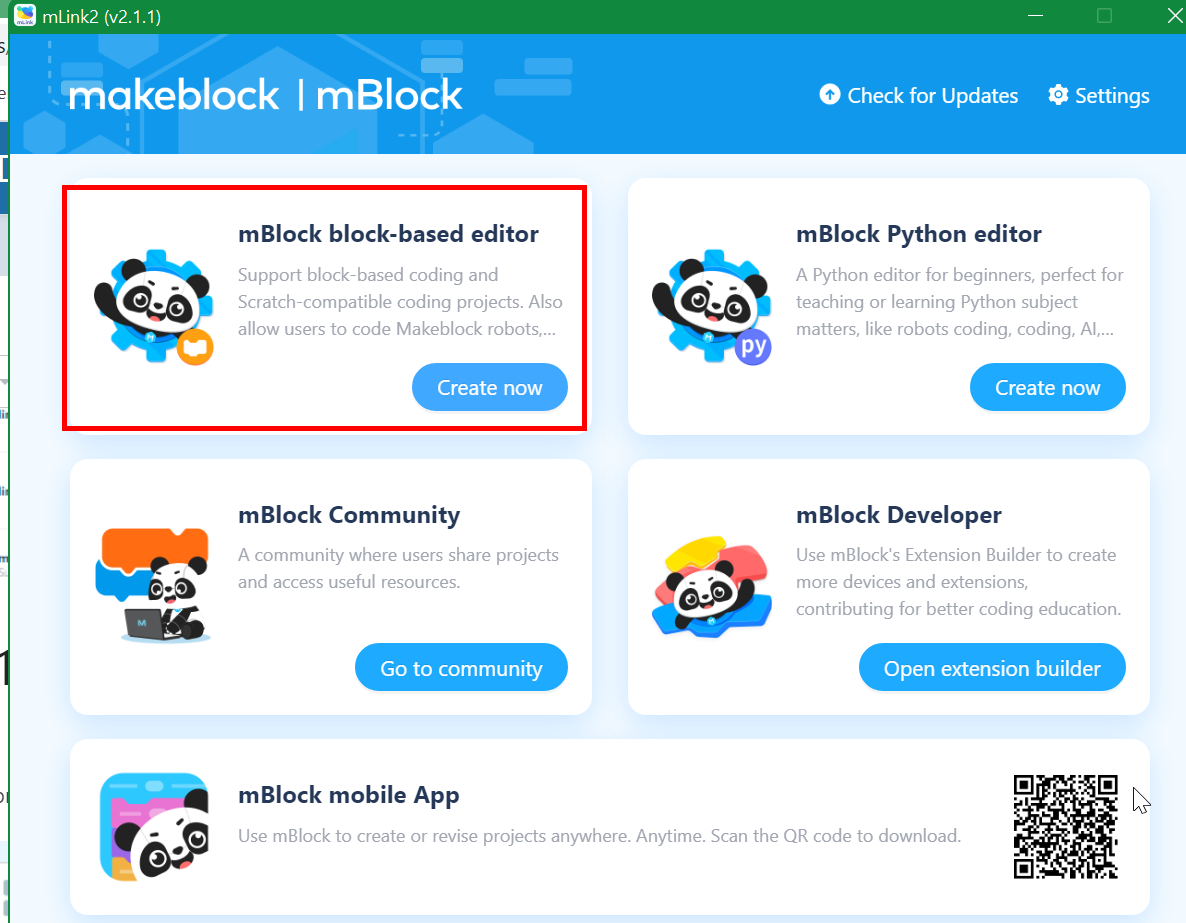
4.1.1 Versión Web
Después de lanzar mLink se abre las diferentes opciones de trabajar, elegimos programar en bloques
Se abre la página web https://ide.mblock.cc/ en el cual tenemos que añadir el dispositivo mBot, y darle a conectar.
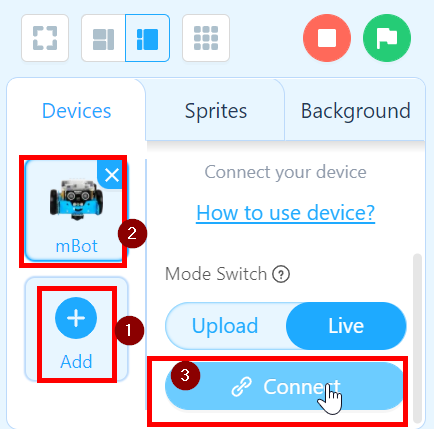
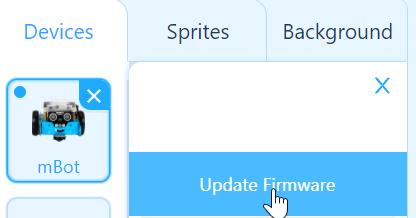
Si trabajamos en vivo o live pide instalar el firmware
En modo cargar o upload solo permite el evento Cuando mBot se pone en marcha. Una vez acabado el programa, le damos a subir:

4.1.2 mBlock PC versión 5
En este caso descargamos el programa y no es necesario ejecutar mLink. La interfaz y el funcionamiento es exactamente igual que la versión web.
4.1.3 mBlock versión 3
Una vez dentro del programa, seleccionamos mBot

Fuente: https://mclon.org Maria L CC-BY-SA
Y lo conectamos por el puerto serie, teniendo nuestro mClon conectado por cable al ordenador. Si no lo detecta, instalar el driver de Arduino.

Fuente: https://mclon.org Maria L CC-BY-SA
Hay dos modos de funcionar: Dependiendo del ordenador (o en vivo en versiones 5x o Web), tiene la desventaja de que va lento, pues el programa lo ejecuta el ordenador y hay que tener mClon conectado pero tiene la ventaja que podemos interactuar con el ordenador. Para ello hay que instalar el programa por defecto:

Fuente: https://mclon.org Maria L CC-BY-SA
O el modo independiente del ordenador (modo Cargar en versiones 5x o Web) donde el programa se ejecuta en el mismo mClon y puede ir desconectado del ordenador, es el método más aconsejable al menos que se quiera interactuar con el ordenador.

Fuente: https://mclon.org Maria L CC-BY-SA
Si quieres más información de la forma de programar con mBloc, visita el curso mBot en www.catedu.es en tutoriales
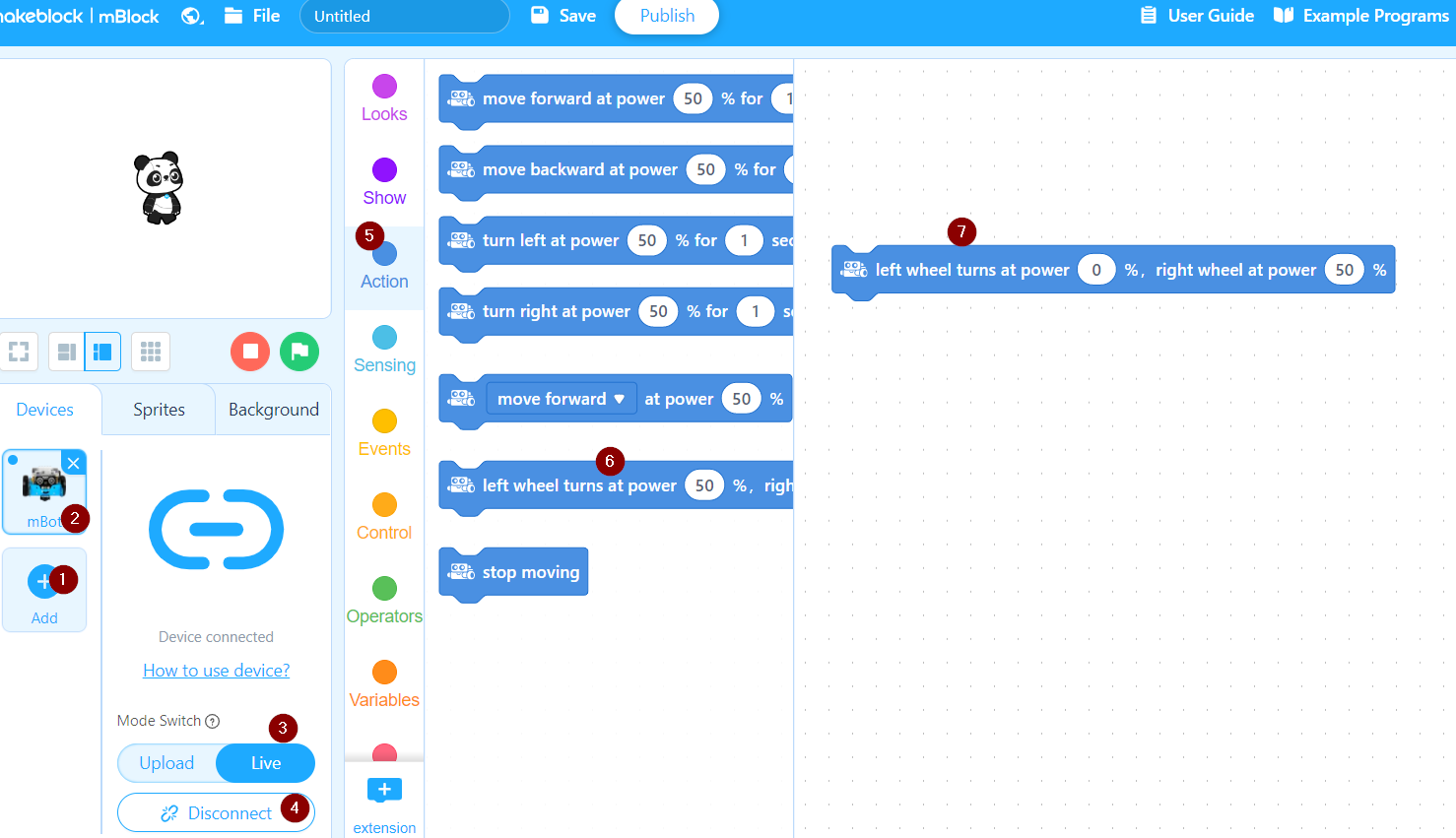
4.2 Testeo con mBlock de motores
Ahora hay que hacer programas sencillos de los diferentes elementos. La forma más rápida y sencilla es el modo live, en vivo o dependiendo del ordenador (como quieras llamarlo).
Si alguno no funciona, hay que comprobar las conexiones, verificar continuidad con un polímetro... etc.
Ponemos el mClon dependiendo del ordenador y hacemos dos cliks en esta instrucción :

Si no gira el motor, a lo mejor es que están intercambiados el izquierdo y el derecho, ejecuta pues este programa.

Si tampoco funciona, revisar el pin VM que tiene que estar conectado a +5V Ard.
Si el giro de algún motor no es el apropiado, es que están intercambiado su polaridad.
Si uno de los dos nunca gira, revisa las conexiones entre controlador e inversor.
Si utilizas las versiones Web o 5x de mBlock cambia algo la instrucción
4.3 Testeo con mBlock de los sensores
4.3.1 Test rápido del siguelíneas
Primera comprobación para el sigue líneas, primero hay que testear que funcionan correctamente su detección negro blanco, para ello utilizamos un folio con una línea negra y vemos si se encienden los leds cuando hay blanco y no se encienden cuando hay línea negra:

Fuente: https://mclon.org Maria L CC-BY-SA
Si no funciona bien, es que los pines están mal conectados, es fácil confundirse pues va uno al revés del otro :

Fuente: https://mclon.org Maria L CC-BY-SA
4.3.2 Test con mBlock versión Web o ver 5x de los valores de los sensores
En modo vivo es tan fácil como hacer check en los diferentes sensores. Arriba en el panda enseña sus valores
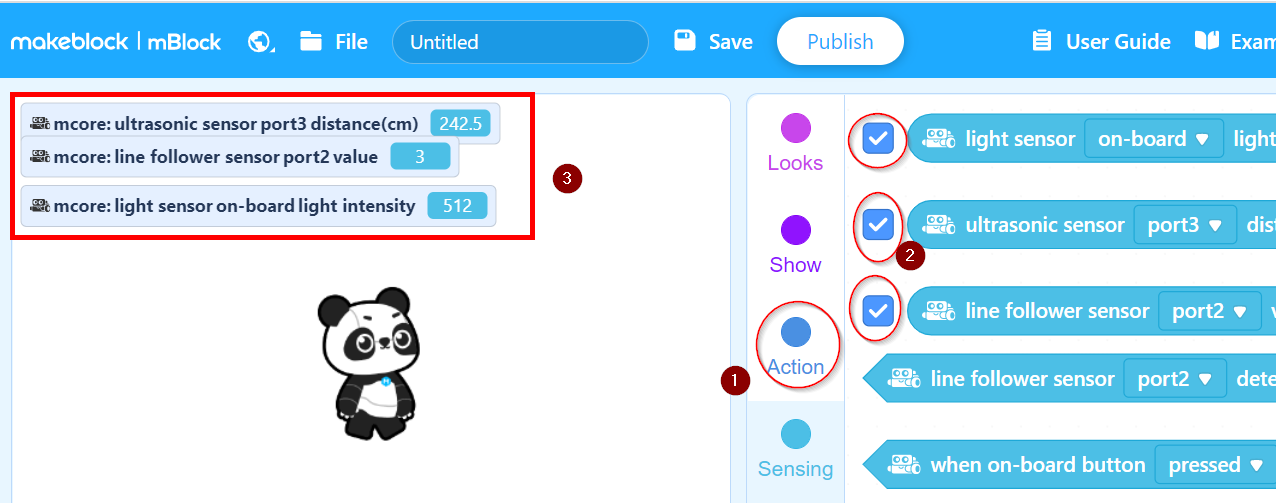
En el sigue líneas tiene que salir los siguientes valores :
- 0 si detecta todo negro (en binario 00)
- 1 si detecta blanco derecha pero negro a la izquierda (01)
- 2 al revés (10)
- 3 si detecta los dos blancos (11)
Si funciona al revés es que se han intercambiado los pines D9 y D10
En el sensor de ultrasonidos la distancia en cm del obstáculo enfrente de los "ojos"
En el sensor de luz, el valor ambiental, es interesante tomar nota de este valor para crear programas en el futuro, ver cual es el umbral de la oscuridad, es decir, qué valor es cuando tenemos la habitación o aula con luz, y cual es el valor con el mismo lugar a oscuras. Por ejemplo ver estos programas del Scrath Day Nerja
4.2.3 Testeo con mBlock ver 3x de los valores de los sensores
SENSOR ULTRASONIDOS
Un programa sencillo es el siguiente en el modo dependiendo del ordenador

Fuente: https://mclon.org Maria L CC-BY-SA
Y el oso panda nos va diciendo las distancias:

SENSORES SIGUE LINEAS
Luego hacemos el siguiente test con mBlock dependiendo del ordenador y el osito panda nos dirá qué ocurre:

Fuente: https://mclon.org Maria L CC-BY-SA
Si funciona al revés es que se han intercambiado los pines D9 y D10
SENSOR DE LUZ
Recomendamos usar este programa en el modo dependiendo del ordenador o en vivo

El muñeco panda nos irá diciendo la cantidad de luz
Este programa nos servirá para definir el umbral de oscuridad descrito anteriormente
4.4 Testeo con mBlock accesorios
4.4.1 Con mBlock versión Web o 5x
El zumbador es muy fácil comprobarlo con la conexión live o en vivo de nuestro mClon

Una vez que ya está comprobado, realizamos este programa para testear el pulsador

4.4.2 Con mBlock versión 3x
ZUMBADOR
Este programa es sencillo en el modo independiente del ordenador

Fuente: https://mclon.org Maria L CC-BY-SA
PULSADOR
Aprovechando que el zumbador ya funciona, hacemos este programa de forma independiente del ordenador:

Fuente: https://mclon.org Maria L CC-BY-SA
4.5 Test de los extras
4.5.1 Con mBlock versión Web o 5x
LEDS
En modo live o vivo tenemos dos instrucciones, al hacer clik en el primero podemos elegir el color, en el segundo tenemos más control de los valores, por ejemplo podemos hacer el blanco total 255,255,255 que la primera instrucción no puede:
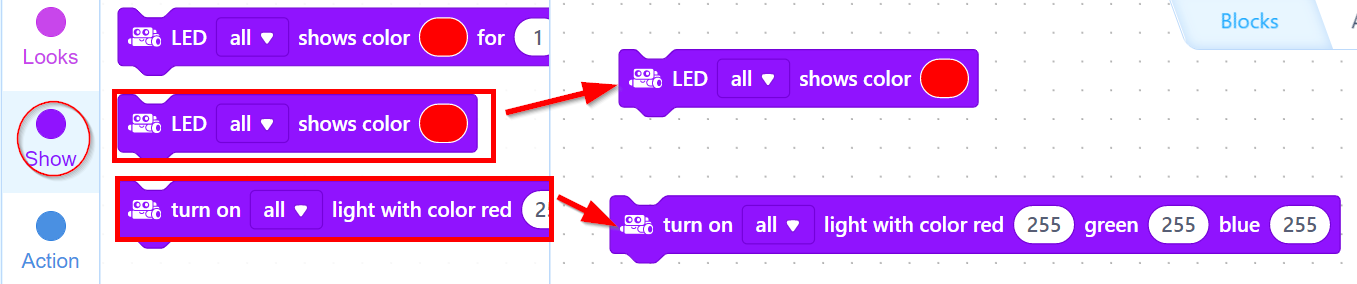
ya sabes que hemos explicado que el rojo y el azul están intercambiados
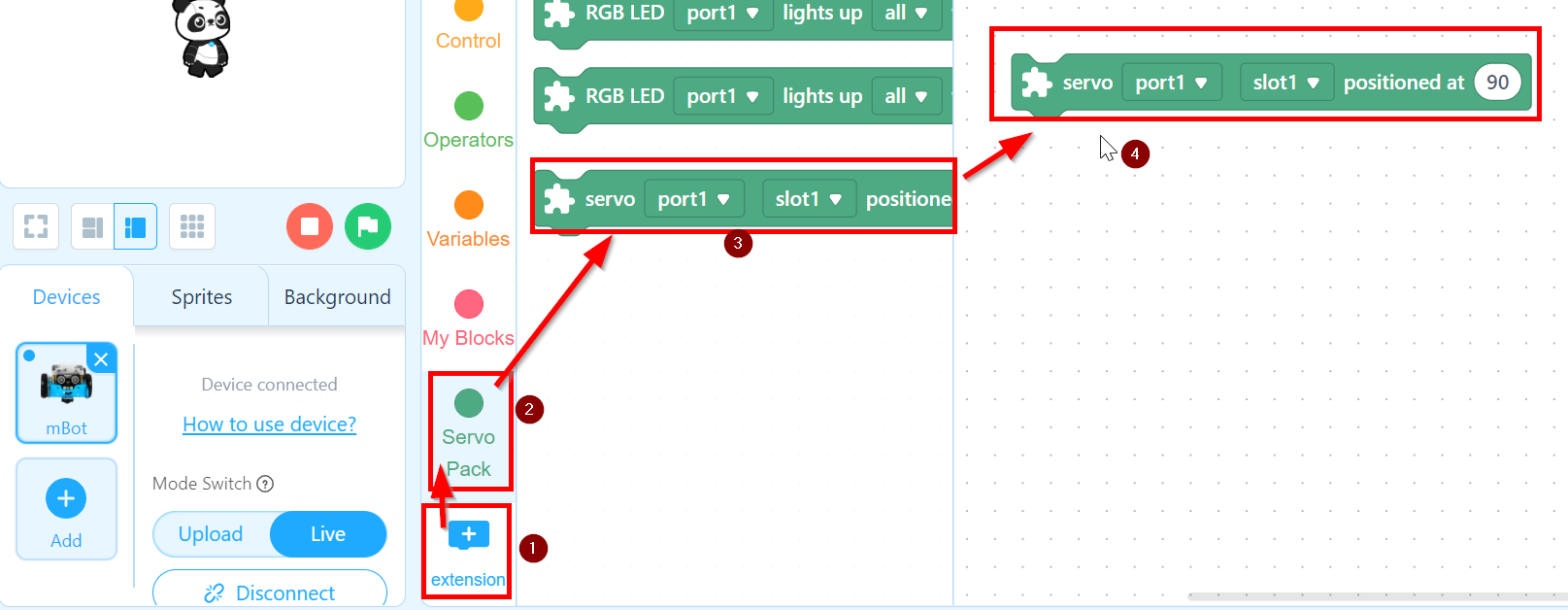
BRAZO
No está por defecto la instrucción, tenemos que instalarla en Extensión - Paquete servo y en modo live o vivo podemos ejecutarlo con dos cliks
Es el momento adecuado para calibrarlo, desmontar el brazo y colocarlo de forma que
- El ángulo de 0º corresponde a posición horizontal
- El ángulo de 90º corresponde a posición vertical
Una vez identificado cual es el ángulo 90ª ejecutando la instrucción anterior, y una vez puesto el servo en esa posición, poner el brazo levantado con un ligero ángulo hacia delante, tal y como indica la figura :

Fuente: Adaptado de https://mclon.org Maria L CC-BY-SA
Si va muy deprisa, puedes ralentizarlo con el programa que se describe más abajo.
4.5.2 Con mBlock versión 3x
BRAZO
Con el mClon dependiendo del ordenador hacemos dos clicks en esta instrucción, experimentando diferentes ángulos:

Una vez realizado, podemos experimentar este programa independiente del ordenador

Fuente: https://mclon.org Maria L CC-BY-SA
Como podrás observar va muy deprisa, una solución es poner en ángulo una variable que va aumentando:

Fuente: https://mclon.org Maria L CC-BY-SA
LEDS RGB
Pon mClon dependiendo del ordenador y ejecuta dos clicks en esta instrucción:

ya sabes que hemos explicado que el rojo y el azul están intercambiados
4.6 Testeo con mBlock
Proponemos este test completo de todos los componentes y actuadores
- Actuadores
- Motores
- Sensores
- Sensor ultrasónico
- Sensores sigue-líneas
- Sensor luz
- Accesorios
- Botón
- Buzzer
- Extras
- Leds RGB
- Brazo
La propuesta es A MCLON LE GUSTA LA MARCHA PERO NO LE GUSTA EL ALCOHOL :
- Si se pulsa el botón comienza el programa
- Que el mClon realice un circuito siguelíneas (puedes descargartelo imprimiento estos 4 ficheros Word en este enlace )
- Si en el camino encuentra una lata, la retira
- Si se hace de noche, se pone a cantar
- Programa con mBlock versión Web en https://planet.mblock.cc/project/1504279
- Programa con mBlock version 5x en https://drive.google.com/drive/folders/1D8vIUNfCDCvM_04RG5HMXtUEGcaBmnTI?usp=sharing
- Programa con mBlock version 3x en https://drive.google.com/drive/folders/1D8vIUNfCDCvM_04RG5HMXtUEGcaBmnTI?usp=sharing
Explicación del programa:
Tiene varios bloques definidos, este bloque SIGUE LINEA cumple la función de seguir la línea negra, pero si detecta un 3, llama al bloque Buscalinea pues está fuera del circuito:

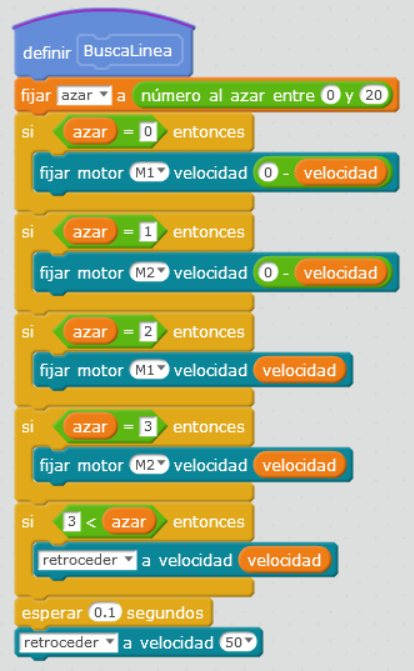
El bloque BuscaLinea elige un número al azar y el 80% de veces retrocede a buscarlo, el otro 20% busca girando. Esto se hace así porque algunas veces se queda "atascado" hacia delante y hacia atrás, ese 20% es para romper ese ciclo vicioso.
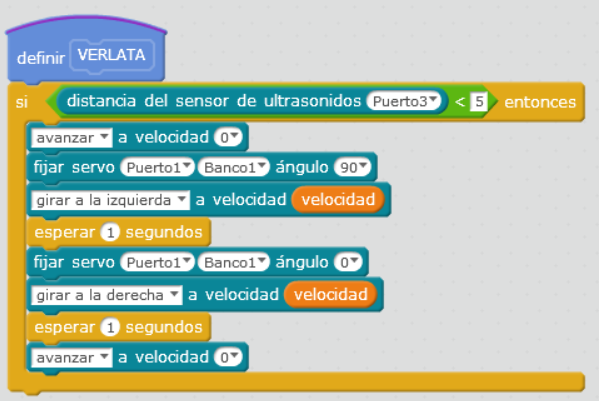
La función VERLATA mira si hay una lata delante, y en ese caso la retira :
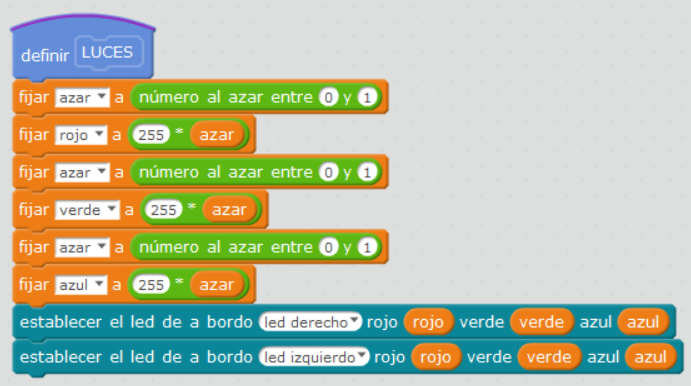
La función Para-si-oscuridad esta basado en este vídeo, se detiene en el caso de que se apaguen las luces y reproduce un juego de luces con RGB y sonidos con el Buzzer:
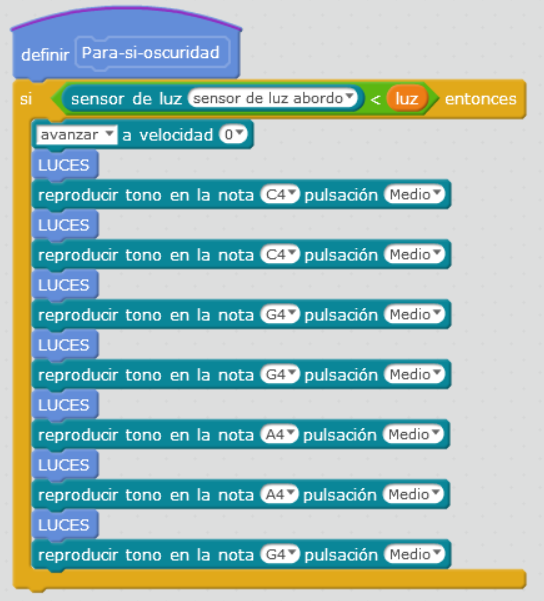
Donde el bloque LUCES enciende los RGB al azar
Finalmente el programa principal que llama a todos los bloques es

Donde tenemos que definir:
- La variable velocidad si es muy alta puede saltarse el circuito, si es muy baja puede que los motores no tengan suficiente fuerza para arrancar, depende del estado del PowerBank
- La variable luz que depende de las condiciones de la habitación, hay que elegir un valor lo suficientemente alto para que la luz detectada por el LDR sea mayor cuando las luces de la habitación están encendidas, y lo suficientemente baja para que cuando se apaguen, el valor medido por el LDR este más bajo de ese valor.
Para la variable luz recomendamos usar el programa visto en 4.3 Testeo sensores
En la página https://mclon.org/ puedes encontrar interesantes propuestas en el apartado mBlock :
- Movimiento https://tecnoloxia.org/mclon/o-robot-en-movemento/
- Cerramiento en línea https://tecnoloxia.org/mclon/recinto-con-lina-2/
- Sigue líneas https://tecnoloxia.org/mclon/unha-lina-no-chan/
- Detectar objetos https://tecnoloxia.org/mclon/detectar-obxectos/
- Luces RGB https://tecnoloxia.org/mclon/extras/luces-de-cores/
- Brazo robótico https://tecnoloxia.org/mclon/extras/brazo/
- Siguiendo una luz https://tecnoloxia.org/mclon/extras/seguindo-a-luz/
4.7 Test con IDE
No hay que olvidad que mBot y mClon son en el fondo Arduinos, aunque sus placas no sean exclusivamente Arduinos UNOs. Por lo tanto podemos programar :
- De forma gráfica como hemos visto con mBlock y otros como ArduinoBlocks, Visualino ...
- De forma textual, con el programa IDE de Arduino.
Este programa se puede descargar en https://www.arduino.cc/en/software
No vamos a entrar, pues se escapa de las intenciones de este curso que es montar un mClon y probarlo, y esto ya se ha visto con programación por bloques con mBlock que es donde se obtiene todo el potencial de mClon al ser compatible con mBot.
No obstante, si quieres programarlo con texto, te recomendamos visitar la página https://mclon.org:
Propuestas con código :
- Como conectar el IDE a mClon https://tecnoloxia.org/mclon/o-ide-de-arduino/
- Pruebas test con IDE https://tecnoloxia.org/mclon/probas-de-funcionamento-ide/
- Control motores https://tecnoloxia.org/mclon/o-control-dos-motores/
- Cerramiento con línea https://tecnoloxia.org/mclon/recinto-con-lina/
- Sigue líneas https://tecnoloxia.org/mclon/seguir-lina-basico/
- No chocar. Sensor ultrasónico https://tecnoloxia.org/mclon/ultrasonico/
- Zumbador https://tecnoloxia.org/mclon/o-zumbador/
- Luces RGB https://tecnoloxia.org/mclon/extras-ide/luces-de-cores-ide/
- Brazo robótico https://tecnoloxia.org/mclon/extras-ide/brazo-ide/
Tamén esquivo obstáculos! Ollo cos sensores ultrasónicos chineses. Dependendo do fabricante algúns van perfectos e outros saen algo rariños. pic.twitter.com/z7p1cI9VUb
— mClon (@mClonRobot) November 9, 2018
Muro
En este Padlet https://padlet.com/CATEDU/mclon puedes poner tus ejemplos o ejemplos que veas interesante para mostrar a los demás
Grupo telegram mClon
Para mClon hay un grupo de Telegram :

Y un canal de Twitter @mClonRobot
Pensamiento computacional
¿Dónde se encaja este robot?¿se puede comparar este robot con otros robots de otros cursos que hacemos desde CATEDU?
Esta es la hoja de ruta que proponemos, no se tiene que tomar al pie de la letra, pero intenta ayudar al profesorado que tenga una visión global de tanta oferta:
Como se puede ver mClon es una alternativa muy buena y barata para de mBot que encaja muy bien a diferentes edades de primaria y secundaria
Guía orientativa
Tenemos un grupo Telegram Robótica Educativa en Aragón, https://t.me/roboticaeducativaaragon

Creditos
Adaptado de https://mclon.org/ por Javier Quintana CATEDU.
Autores de https://mclon.org/:
- María Loureiro. Catedrática de Tecnología en IES Primeiro de Marzo, Baiona. @tecnoloxia
- Bernardo Álvarez. Catedrático de Tecnología en IES de Teis, Vigo. @biober
- Miguel Gesteiro. Maker, Vigo. mgesteiro
Licencia: CC-BY-SA
![]()

