# mClon con nanoArduino
# Introducción
*Fuente: [https://mclon.org](https://mclon.org) Maria L CC-BY-SA*
Tal y como dice [https://tecnoloxia.org/mclon/que-e-mclon/](https://tecnoloxia.org/mclon/que-e-mclon/)
> *mClon es un robot educativo de bajo costo que imita al mBot y se puede programar con el software mBlock como si fuera un mBot. Está basado en Arduino, por lo que también se puede programar con el IDE de Arduino. Por tanto, es un robot lo suficientemente versátil como para poder adaptarse a **múltiples niveles educativos** , y está especialmente indicado para trabajar en **Educación Secundaria Obligatoria y Bachillerato.** Es un proyecto de hardware y software gratuito*"
Este tutorial NO explica el funcionamiento del Arduino y su programación, sino el montaje de mClon
# OBJETIVOS
1. Conocer la **filosofía Maker**: extensón de la cultura DIY basándose harware y software libre como elementos de enriquecimiento del conocimiento y adaptación y reutilización de diseños publicados.
2. Conocimientos básicos y habilidad de montaje en **electrónica**: placas, cableados, sensores y actuadores.
3. Conocer las **posibilidades didácticas** de los robots Maker: compatiblidad con los comerciales, programación gráfica y programación en código.
# CONTENIDOS
1. **Conocer mClon**
1. mClon como sustituto de mBot
2. La electrónica de mClon
3. Concienciación de las diferentes opciones de montaje, sus ventajas e inconvenientes.
2. **Propuesta** de montaje de CATEDU: ventajas e inconvenientes
1. Chasis 3D, la alimentación PowerBank y Placa Robodyn
2. Extras que se proponen: ventajas didácticas.
3. **Montaje de mClon**
1. Preparar el material y adecuarlo
2. Ensamblar las piezas en el chasis
3. Cableado de los diferentes elementos
4. **Testeo**
1. Test con programación gráfica mBlock de los diferentes elementos. Conocer las posibles fallas y su solución.
2. Test completo de todos los elementos con programación gráfica.
3. Test con programación con código
# 1 ¿Cómo es mClon con nanoArduino?
# 1.1 Placa electrónica nanoArduino
El robot mClon como mBot son sistemas basados en Arduino. La placa controladora es pues un Arduino, pero como veremos en[ **opciones**](https://libros.catedu.es/books/mclon-con-nanoarduino/page/21-opciones) en vez de un Arduino UNO vamos a utilizar un nanoArduino
**P: ¿Por qué se utiliza un nanoArduino y no un Arduino normal?**
R: Porque para la compatibilidad con mBot se necesita un Arduino con dos I/O Analógicas más el A6 y el A7 para colocar el sensor de luz y el pulsador de abordo.
[](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-17-13-42-27-mblock-block-based-ide-coding-for-beginners.png)
**P: ¿Tiene que ser el nanoArduino necesariamente?**
R: No, puede ser el RobotDyn UNO pero últimamente (2022) es muy dificil de conseguir en el mercado. Antes el mClon se hacía con esta placa, ver [https://libros.catedu.es/books/regalate-un-mclon/page/11-la-placa-electronica](https://libros.catedu.es/books/regalate-un-mclon/page/11-la-placa-electronica)
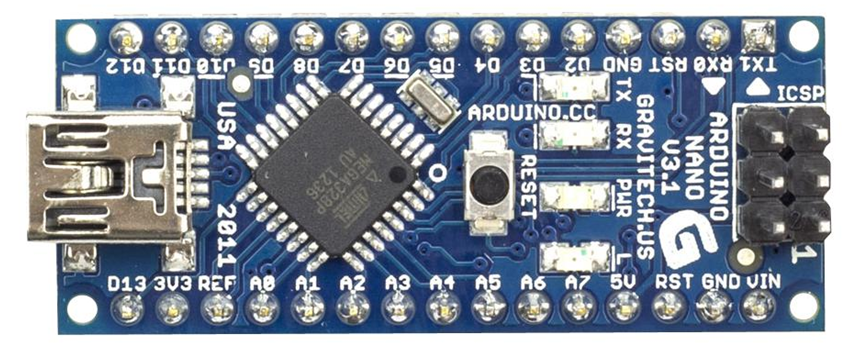
**P: ¿NanoArduino cumple con la condición de ser una placa 100% compatible con mBot?**
R: Si, y no, desde el punto de vista del hardware SI que tiene los pines A6 y A7
[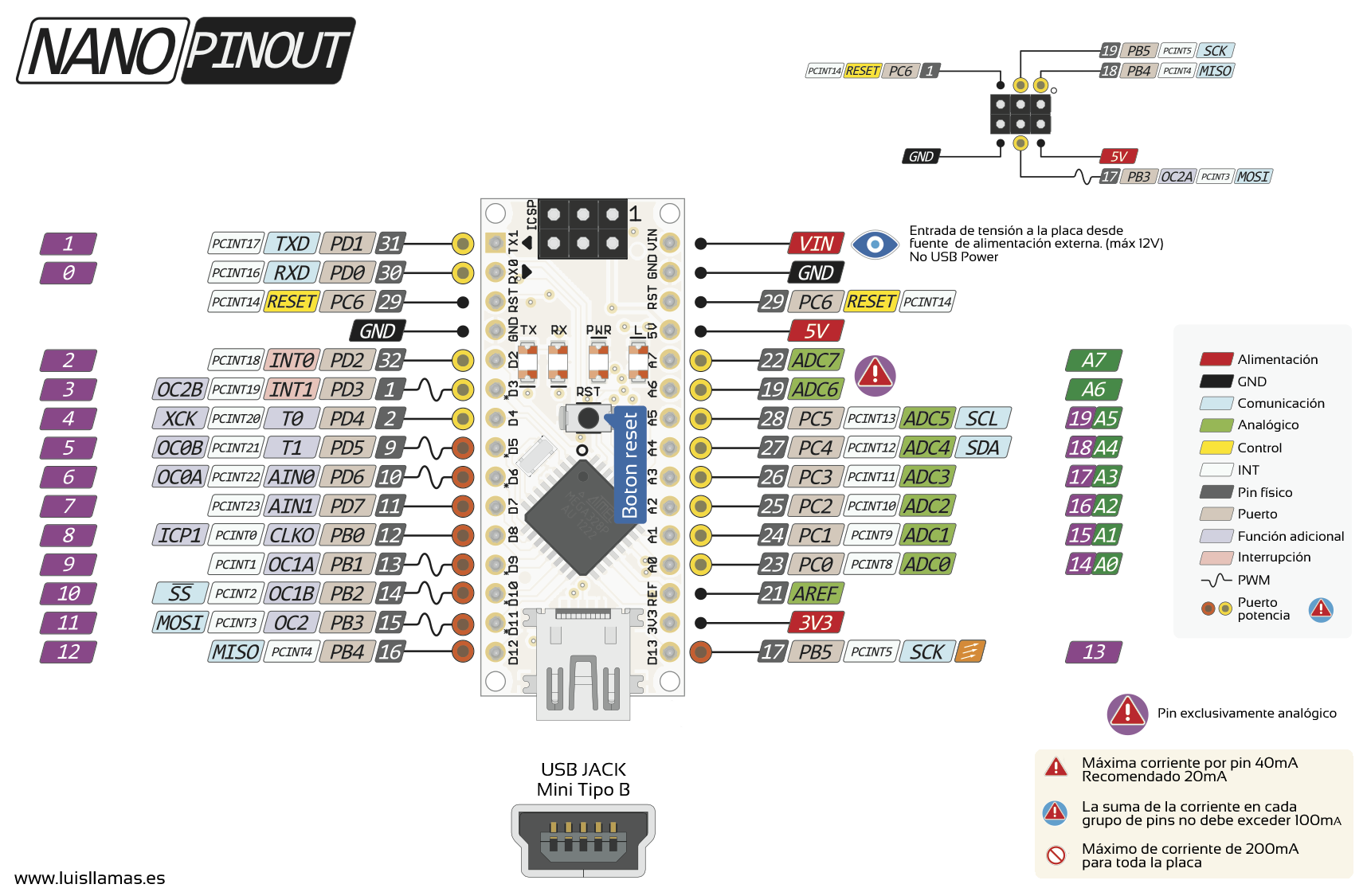](https://libros.catedu.es/uploads/images/gallery/2022-03/aduino-pinout-nano.png)
Fuente Luis Llamas BY-NC-SA [https://www.luisllamas.es/esquema-de-patillaje-de-arduino-pinout/](https://www.luisllamas.es/esquema-de-patillaje-de-arduino-pinout/)
Pero desde el punto de vista del SOFTWARE HAY QUE INSTALAR EL BOOTLOADER DE UNO-R3 EN EN NANO ARDUINO
**ESTE PASO LO HA HECHO YA CATEDU EN EL KIT DE PRÉSTAMO, NO LO TIENES QUE HACER TÚ**
Aquí tienes un buen tutorial de cómo se hace y qué significa [https://www.luisllamas.es/usar-arduino-para-reprogramar-el-bootloader/](https://www.luisllamas.es/usar-arduino-para-reprogramar-el-bootloader/)
Y un vídeo por complementar :
Con una shield en el arduino protoboard :
[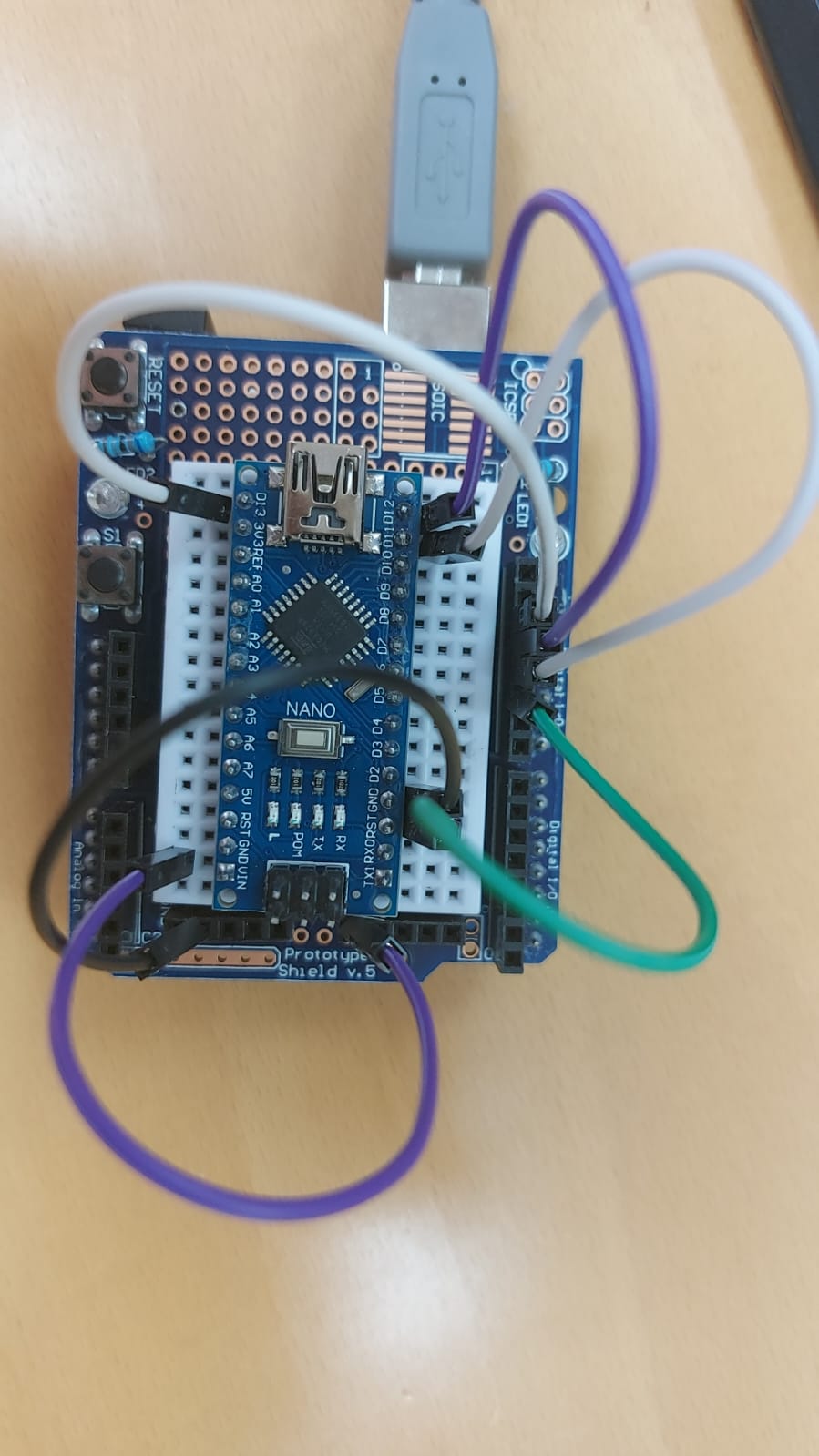](https://libros.catedu.es/uploads/images/gallery/2022-09/arduino-grabandoarduinonano.jpeg)
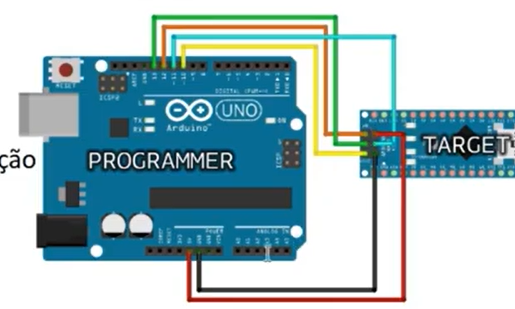
Paso 1: Grabar en el Arduino el programador ArduinoISP de ejemplos
[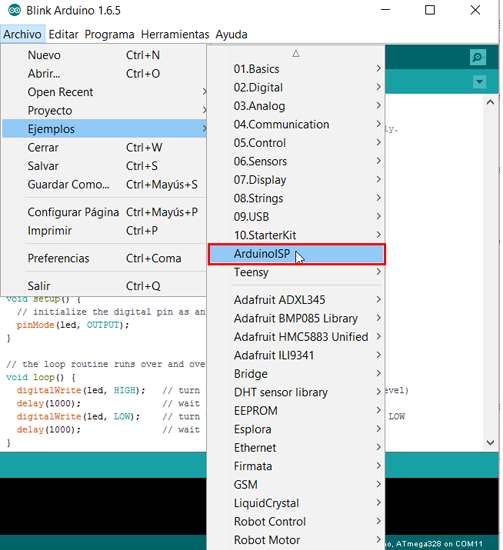](https://libros.catedu.es/uploads/images/gallery/2022-09/bootloader1.jpg)
*Fuente Arduino Llamas CC-BY-NC-SA [https://www.luisllamas.es/usar-arduino-para-reprogramar-el-bootloader/](https://libros.catedu.es/Fuente%20Arduino%20Llamas%20CC-BY-NC-SA%20https:/www.luisllamas.es/usar-arduino-para-reprogramar-el-bootloader/)*
Paso 2 Programador Arduino como ISP
[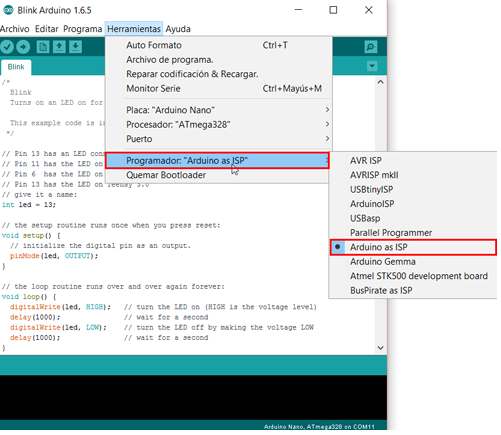](https://libros.catedu.es/uploads/images/gallery/2022-09/bootloader2.jpg)
*Fuente Arduino Llamas CC-BY-NC-SA [https://www.luisllamas.es/usar-arduino-para-reprogramar-el-bootloader/](https://libros.catedu.es/Fuente%20Arduino%20Llamas%20CC-BY-NC-SA%20https:/www.luisllamas.es/usar-arduino-para-reprogramar-el-bootloader/)*
Paso 3 Quemar
[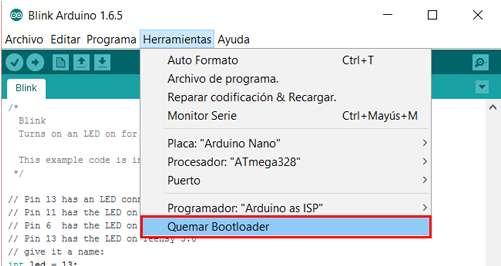](https://libros.catedu.es/uploads/images/gallery/2022-09/bootloader3.jpg)
*Fuente Arduino Llamas CC-BY-NC-SA [https://www.luisllamas.es/usar-arduino-para-reprogramar-el-bootloader/](https://libros.catedu.es/Fuente%20Arduino%20Llamas%20CC-BY-NC-SA%20https:/www.luisllamas.es/usar-arduino-para-reprogramar-el-bootloader/)*
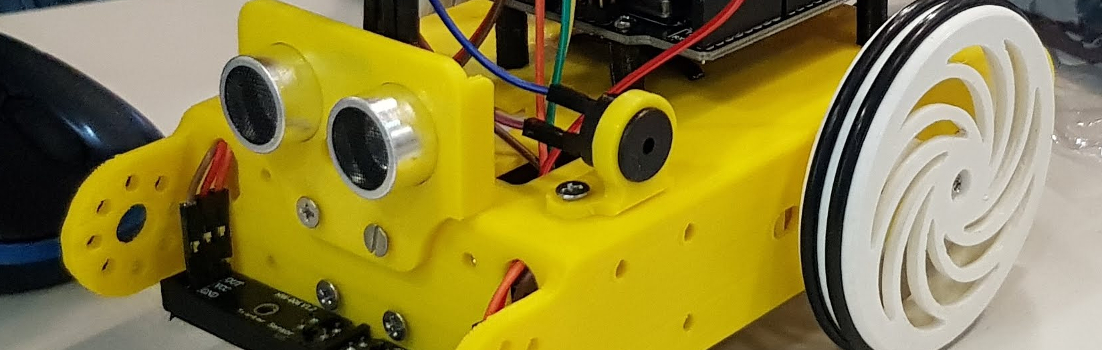
# 1.2 Motores
{{@3319}}
# 1.3 Sensores
{{@3320}}
# 1.4 Accesorios
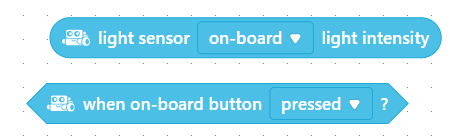
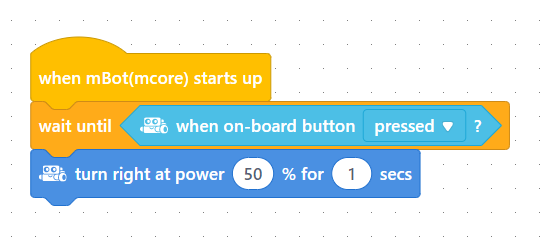
### 1.4.1 Bóton on board
Este botón es muy útil para dar comienzo a los programas, por ejemplo en el siguiente programa hasta que o aprieto el botón el robot no comienza a dar vueltas :
[](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-17-14-45-48-mblock-block-based-ide-coding-for-beginners.png)
Si construimos el mClon con la placa Arduino o con la placa Robodyn tiene la ventaja de que se utiliza una shield que ya tiene incorporado un botón.
En nuestro caso tenemos dos opciones, o construirlo nosotros con este esquema :
[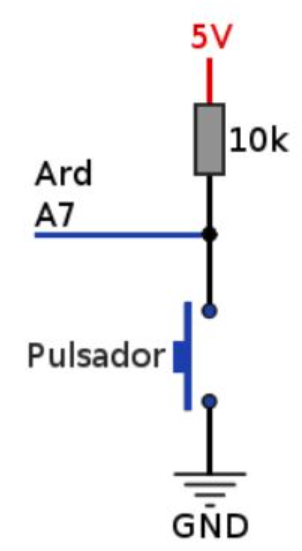](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-17-14-49-44-1-4-accesorios-libreria-catedu.png)
*Fuente: https://mclon.org Maria L CC-BY-SA*
Tiene la desventaja de tener que dejar un cable suelto y cuando queremos activar el pulsador, tocarlo a masa. Otra opción es utilizar un módulo con botón ya construido y **es la opción que hemos elegido**
[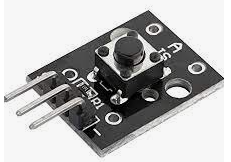](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-17-14-50-50-modulo-boton-arduino-busqueda-de-google.png)
### 1.4.2 zumbador
Sólo se necesita un zumbador **pasivo**, es decir, es un simple altavoz, la instrucción de mBlock ya se encarga de reproducir el tono .

La ventaja de ser pasivo es que podemos reproducir diferentes tonos, para saber más ver [esta página de Luis Llamas](https://www.luisllamas.es/reproducir-sonidos-arduino-buzzer-pasivo-altavoz/) . Un zumbador activo reproduce un tono fijado al suministrarle tensión, para saber más [esta página de Luis Llamas](https://www.luisllamas.es/arduino-buzzer-activo/).
# 1.5 Extras
{{@3322}}
# 2 Propuesta de CATEDU mClon nanoArduino
# 2.1 Opciones
Hay diversas opciones para montar un mClon, todas explicadas en [https://tecnoloxia.org/mclon/opcions/](https://tecnoloxia.org/mclon/opcions/) la propuesta de CATEDU es la siguiente:
## 2.1.1 Chasis
Elegimos la opción impresa por ser la más adaptable para el docente, en el capítulo de partes impresas lo describimos con detalle.
*Fuente: https://mclon.org Maria L CC-BY-SA*
### *2.1.2 Tarjeta electrónica*
Buscamos la máxima compatibilidad con mBot luego no sólo tiene que ser una placa Arduino sino que también tiene que tener las I/O analógicas A6 y A7
Una opción es utilizar ROBODYN UNO R3 ver [https://libros.catedu.es/books/regalate-un-mclon/page/21-opciones](https://libros.catedu.es/books/regalate-un-mclon/page/21-opciones)
Pero por la escasez en el mercado y la dependencia en una sola marca, recomendamos el [nanoArduino ](https://es.aliexpress.com/item/32241679858.html?gatewayAdapt=glo2esp&spm=a2g0o.order_list.0.0.21ef194dPwx0DP)
[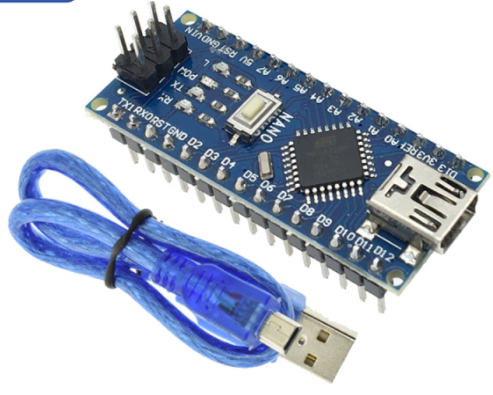](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-17-20-05-41-atmega328-mini-placa-controladora-tipo-c-nano-30-usb-v3-0-atmega328p-ch340g.png)
### 2.1.3 Placa protoboard
La utilización del Arduino nano exige de una placa protoboard, por las dimensiones del mClon utilizaremos la de 400 puntos **muy justo para el resto de componentes** pero cabe todo lo que vamos a montar:
[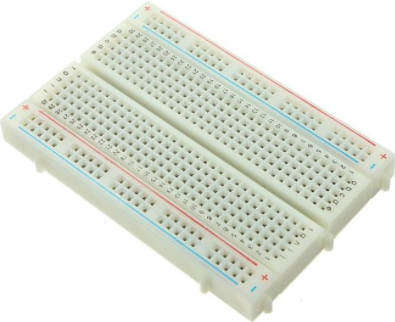](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-17-20-06-57-placa-protoboard-at-duckduckgo.png)
## 2.1.4 La alimentación
De las tres opciones que ofrece [https://tecnoloxia.org/mclon/opcions/](https://tecnoloxia.org/mclon/opcions/) lo hemos tenido muy claro: El **powerbank** sencillo, económico, recargable y da mucha potencia.
# 2.2 Propuesta mClon vs mBot
{{@3324}}
# 2.3 Partes impresas
{{@3325}}
# 2.4 Lista de material
{{@3326}}
# 2.5 Ojo con las pilas 18650
{{@5772}}
# 3 Montaje mClon con nanoArduino
# 3.1 Pasos previos
Los pasos al detalle lo explica en [https://tecnoloxia.org/mclon/estrutura/pasos-previos/](https://tecnoloxia.org/mclon/estrutura/pasos-previos/) pero con la propuesta de Catedu sólo tenemos que seguir los siguientes pasos:
### 3.1.1 Lo que tienes que hacer tú
Tienes que doblar los pines de los sensores **siguelíneas** para que queden perpendiculares al sensor:
[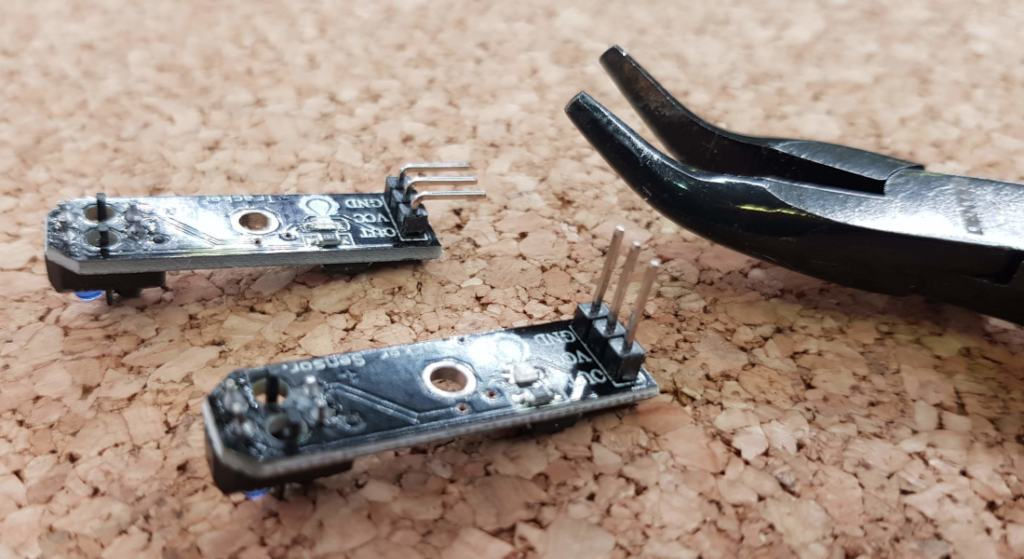](https://libros.catedu.es/uploads/images/gallery/2022-02/embedded-image-1upyqtp8.png)
*Fuente: https://mclon.org Maria L CC-BY-SA*
## 3.1.2 Recomendaciones
Para evitar que los picos de los motores afecten a la electrónica de la placa, es recomendable soldar un condensador de 0.1µF en los motores :
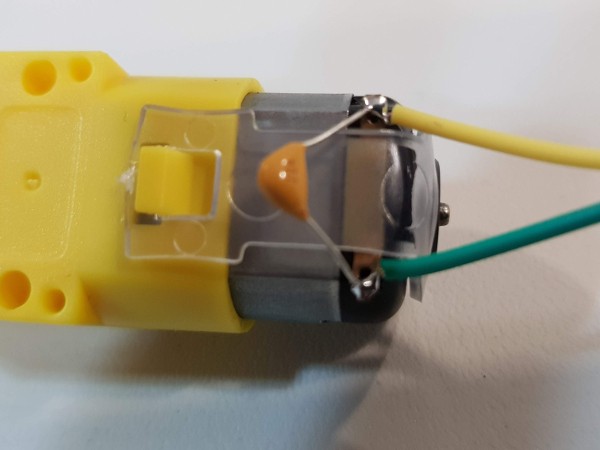
[](https://libros.catedu.es/uploads/images/gallery/2022-02/embedded-image-jtuqcalw.jpeg)
*Fuente: https://mclon.org Maria L CC-BY-SA*
Pero se puede poner en la placa Protoboard en el paso siguiente sin necesidad de soldar
[](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-21-10-56-16-window.jpg)
> Se puede usar la banda transparente de plástico para asegurar los cables. Lo aprendí de Eduardo de [@Complubot](https://twitter.com/Complubot?ref_src=twsrc%5Etfw) [pic.twitter.com/OQEws4Vl75](https://t.co/OQEws4Vl75)
>
> — javacasm (@javacasm) [June 7, 2019](https://twitter.com/javacasm/status/1136891012004143105?ref_src=twsrc%5Etfw)
También es conveniente que con un soldador caliente fijes los tornillos en las piezas impresas 3D, te facilitará el montaje (no te pases calentando) o si el orificio es muy grande, usar un pegamento para fijar la tuerca a la pieza 3D:
[](https://libros.catedu.es/uploads/images/gallery/2022-02/embedded-image-o9dzrwhm.jpeg)
*uente: https://mclon.org Maria L CC-BY-SA*
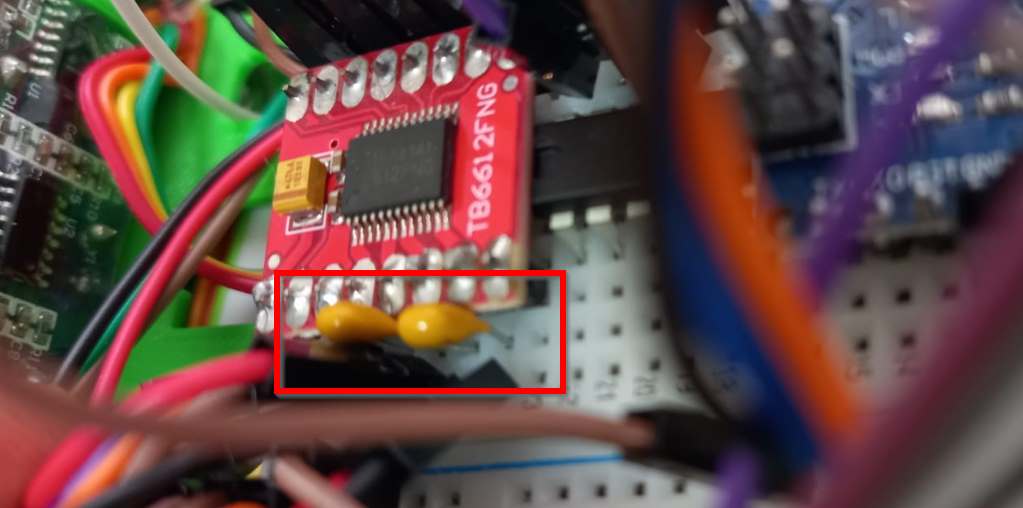
## 3.1.3 Ya realizado por CATEDU
Soldado el controlador TB6612FNG[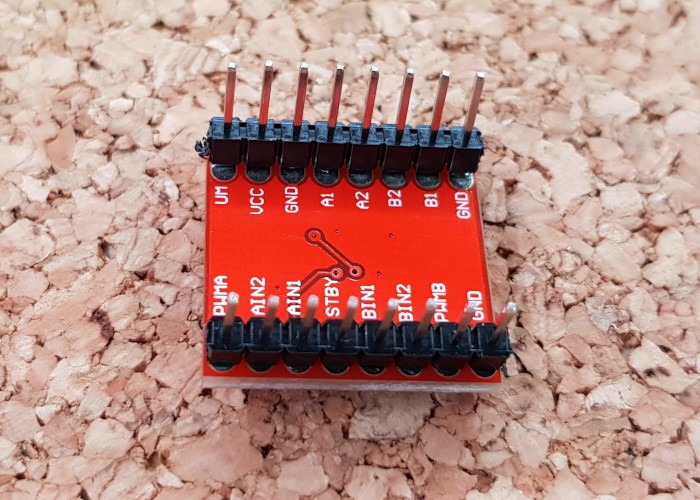](https://libros.catedu.es/uploads/images/gallery/2022-02/embedded-image-rwdiupty.jpeg)
*Fuente: https://mclon.org Maria L CC-BY-SA*
Quemar el bootloader Arduino UnoR3 en el Arduino nano tal y como hemos visto en el [capitulo 1](https://libros.catedu.es/books/mclon-con-nanoarduino/chapter/1-como-es-mclon-con-nanoarduino "1 ¿Cómo es mClon con nanoArduino?")
*[](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-09-34-39-gravando-bootloader-arduino-nano-youtube.png)*
### *3.1.4 Cosas que no es necesario hacer*
En [https://tecnoloxia.org/mclon/estrutura/pasos-previos/ ](https://tecnoloxia.org/mclon/estrutura/pasos-previos/) dice que hay que soldar los pines Echo y Trg del sensor ultrasónico, esto no es necesario hacerlo pues al tener la placa Protoboard, juntaremos los dos en el miso pin
[](https://libros.catedu.es/uploads/images/gallery/2022-02/embedded-image-f3uvfga6.jpeg)
*Fuente: https://mclon.org Maria L CC-BY-SA*
[Comic Soldar Es Facil Spanish Final](https://www.scribd.com/doc/61683730/Comic-Soldar-Es-Facil-Espanol-Soldering-is-Easy#from_embed "View Comic Soldar Es Facil Spanish Final on Scribd") by [javierbasura](https://www.scribd.com/user/356187238/javierbasura#from_embed "View javierbasura's profile on Scribd") on Scribd
# 3.2 Comenzamos
El montaje de este robot es complejo. En CATEDU hemos intentado ayudar a distancia a quienes han tenido problemas, y es muy difícil hacerlo a distancia, por ello este curso online **esta sin tutorización** a cambio, si logras montar el robot y que funcione, te lo quedas. **No está mal ¿no?**
**Pero no queremos desilusionarte, se valiente !!!
[](https://libros.catedu.es/uploads/images/gallery/2022-02/embedded-image-cgfsk09o.gif)**
No te desesperes si al final después de montar todo, las pruebas del test del apartado 4 no te funciona, hay que revisar muy bien las conexiones.
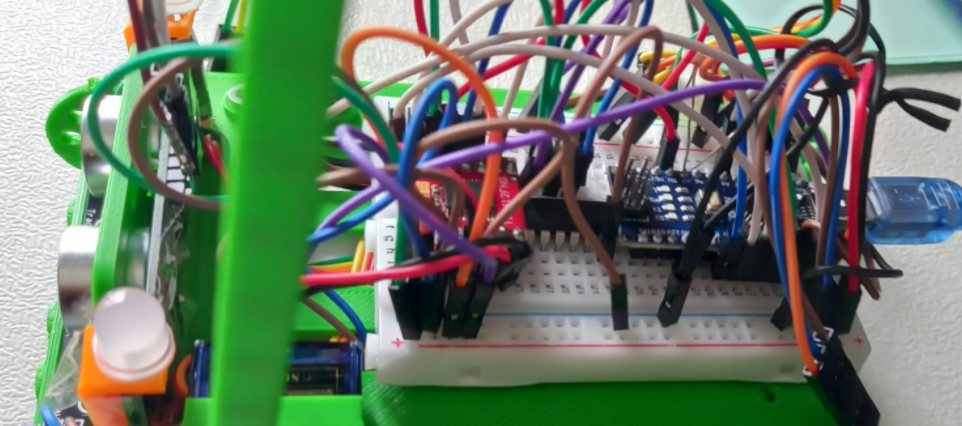
Una manera de asegurarte, es ir montando una de estas páginas de este capítulo, y pasar al test correspondiente del capítulo 4, no pasar a la siguiente página sin asegurar el anterior. Como en la figura, se conecta el zumbador y el pulsador, se testea que funcione, y se pasa al siguiente componente:
[](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-20-11-40-27-whatsapp-y-2-paginas-mas-perfil-1-microsoft-edge.png)
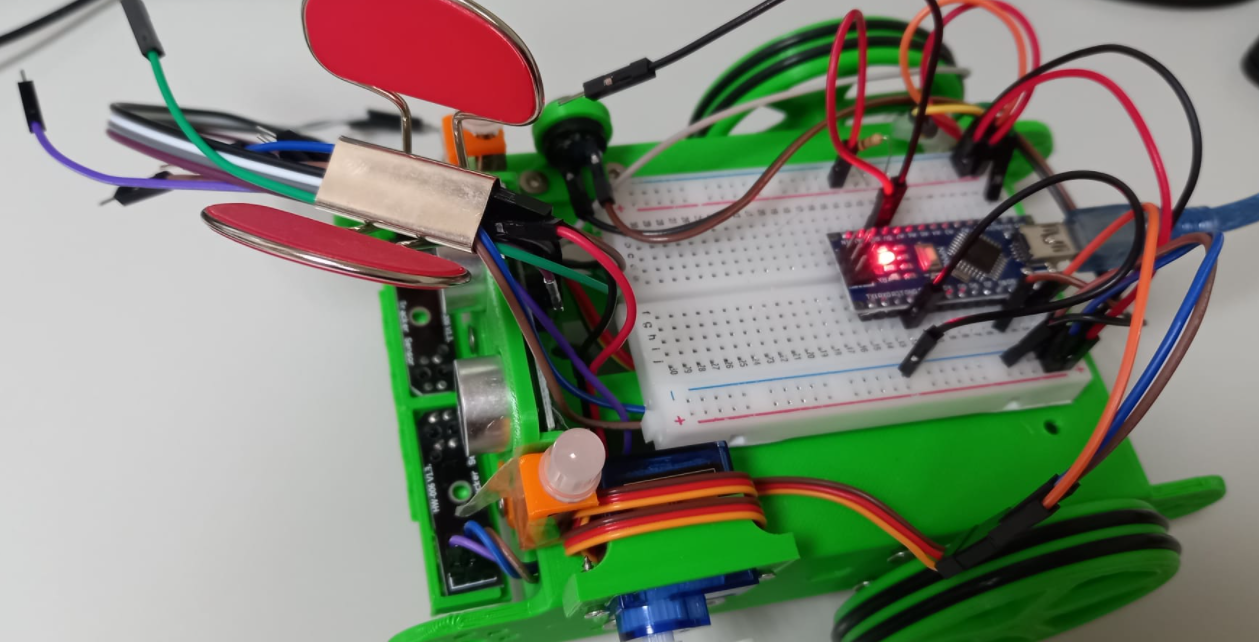
El resultado final tiene su complejidad:
[](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-20-16-49-41-whatsapp.png)
## 3.2.1 Seguidor sigue líneas y bola loca
Ponemos la bola loca y los seguidores en el soporte con los leds hacia abajo:
*Fuente: https://mclon.org Maria L CC-BY-SA*
## 3.2.2 Sensor ultrasonidos
El sensor ultrasónico en el soporte, encaja justo para que no se caiga, es recomendable usar la pistola de pegamento para fijarlo bien. Pon el soporte con dos tornillos en el chasis,:
Pon las juntas tóricas en las ruedas y pasamos a su colocación: Las ruedas encajan muy justas, esto es así para evitar que con los golpes se desileneen. Hay que presionar con los dedos, si ves que cuesta puedes pasar una lima por el orificio para rebajarlo un poco. Fíjalo con los tornillos.
Pon el soporte del servo al lado izquierdo (mirándolo a los ojos el ultrasonido)
[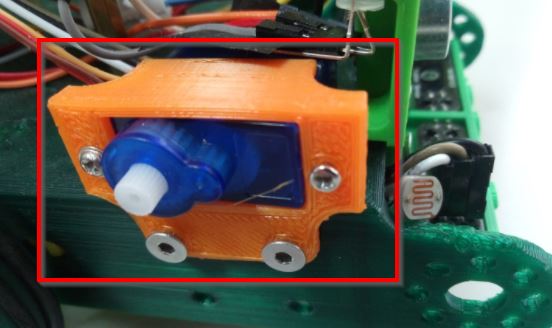](https://libros.catedu.es/uploads/images/gallery/2022-02/embedded-image-3k5ljbhf.jpeg)
El pulsador lo fijamos con un tornillo de punta o con pegamento de pistola
[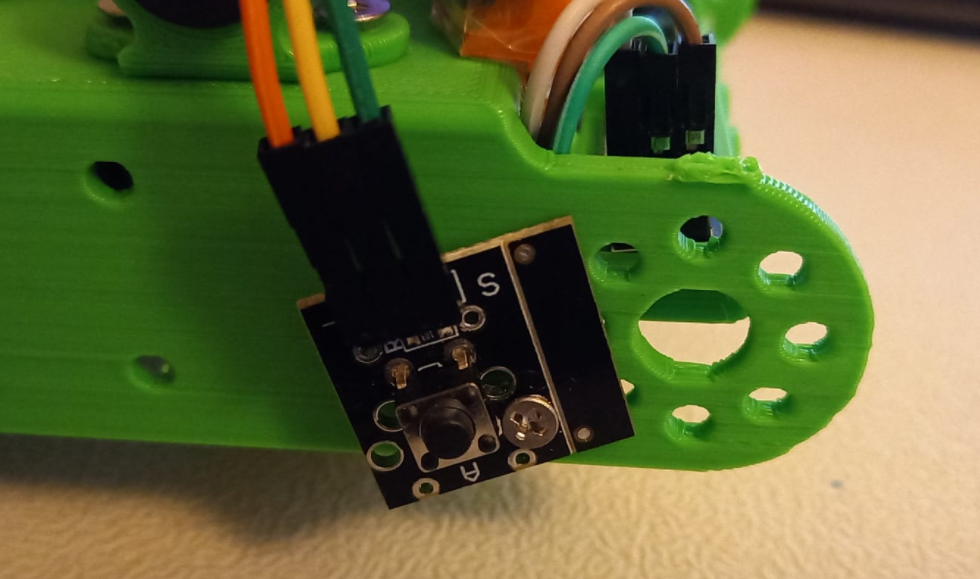](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-22-02-06-whatsapp.png)
## 3.2.5 Powerbank
El Powerbank se sujeta muy bien, pues en un extremo tiene el cable USB, en el otro extremo tiene la bola loca, es recomendable que el lado visible del Powerbank sea el que tenga el led que indica la carga (en la foto me he equivocado) :
[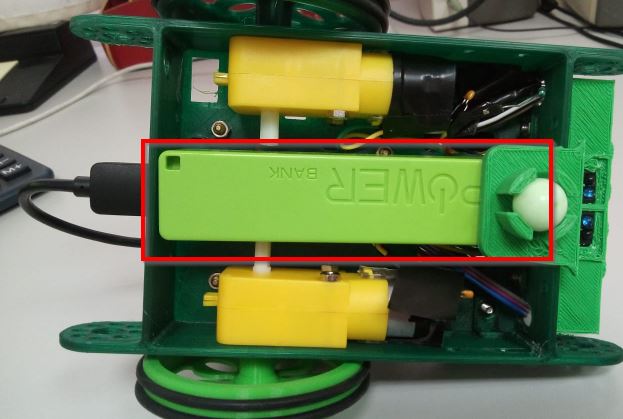](https://libros.catedu.es/uploads/images/gallery/2022-02/embedded-image-dnja6z9o.jpeg)
Para fijarlo bien ponemos una **brida** :
[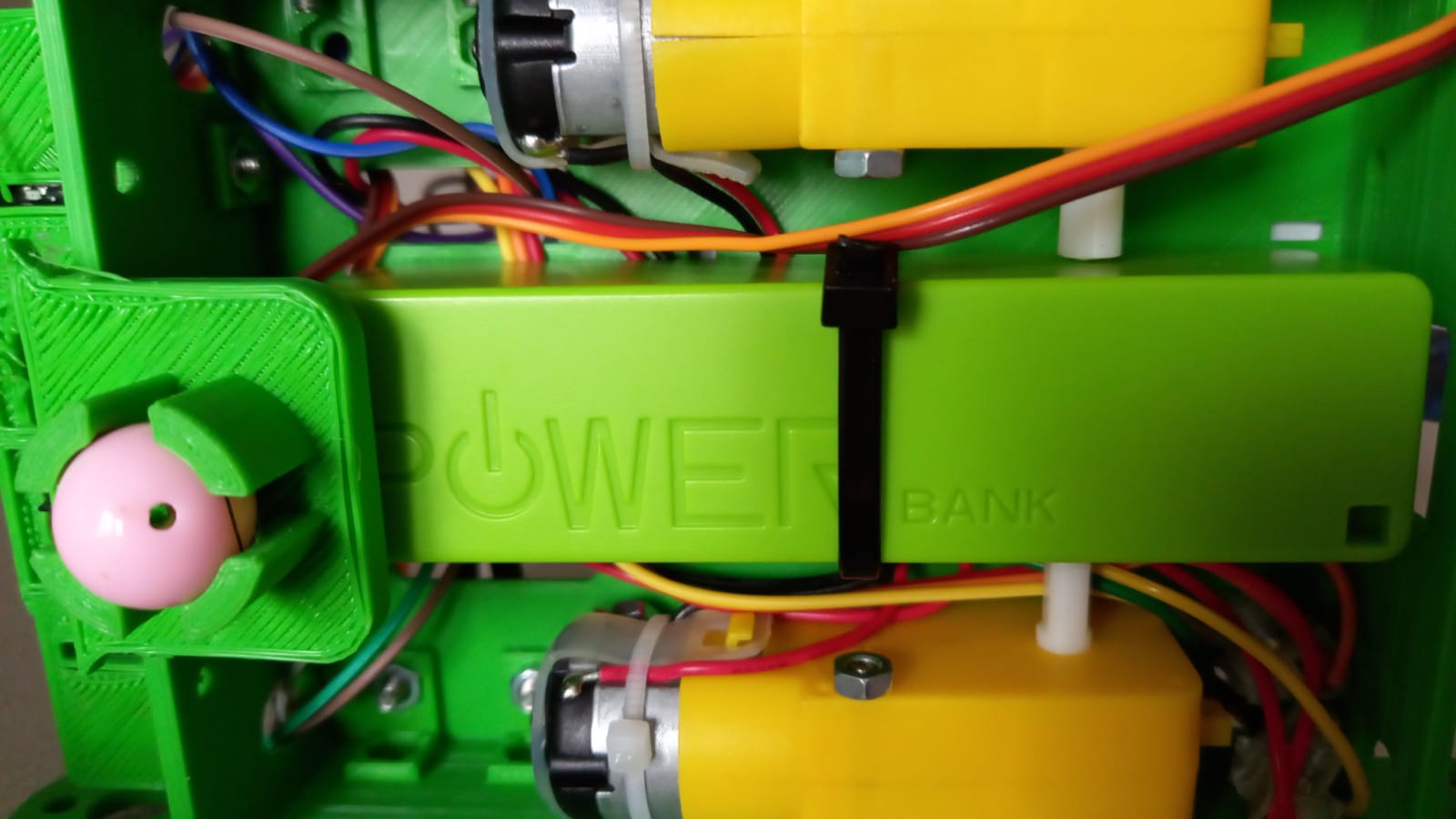](https://libros.catedu.es/uploads/images/gallery/2022-03/28472c53-5ef1-46d0-8bff-eca4727c6d86.jpg)
En teoría no hace falta sacarlo nunca :
- **Carga**: Conectar el cable USB en el orificio microusb

- **Conexión y desconexión del mClon** por el puerto USB grande
# 3.3 Cableado esquema
Este es la parte más difícil !!!
Tenemos que conseguir unir los diferentes elementos con los pines del **nanoArduino**:
- Los pines digitales D0,D1,D2,D3,D4,D5,D6,D7,D8,D9,D10,D11,D12,D13
- Los pines analógicos A0,A1,A2,A3,A4,A5,A6,A7
- Los pines de alimentación GND, VIN
Y tienen que ser estas conexiones y no otras para que sea compatible con mBlock y mBot Ver [planos de mBot](https://tecnoloxia.org/mclon/mbot/) :
## 3.3.1.- Tabla de conexiones
Estas son las conexiones al nanoArduino
[](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-10-15-10-documento1-microsoft-word.png)
**PIN**
**ELEMENTO**
A0
A1
A2
A3
PINES ECHO Y TRG DEL SENSOR DE ULTRASONIDOS
A4
A5
A6
LDR
A7
PULSADOR
D1
D2
D3
D4
Pin BIN1 del driver B6612FNG y en pin 11 del 7404
D5
Pin PWMB del driver B6612FNG
D6
Pin PWMA del driver B6612FNG
D7
Pin AIN1 del driver B6612FNG y en pin 13 del 7404
D8
BUZZER
D9
SENSOR IZQUIERDO SIGUELINEAS
D10
SENSOR DERECHO SIGUELINEAS
D11
SERVO DEL BRAZO ROBOT
D12
D13
LEDS RGB
[](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-10-04-47-3-3-cableado-esquema-libreria-catedu.png)
*Fuente: https://mclon.org Maria L CC-BY-SA*
[](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-10-05-37-3-3-cableado-esquema-libreria-catedu.png)
*Fuente: https://mclon.org Maria L CC-BY-SA*
*[](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-10-09-31-documento1-microsoft-word.png)*
## 3.3.3 Esquema accesorios
*Fuente: https://mclon.org Maria L CC-BY-SA*
El LDR :
[](https://libros.catedu.es/uploads/images/gallery/2022-02/embedded-image-upncdkj7.jpeg)
*Fuente: Adaptado de https://mclon.org Maria L CC-BY-SA*
# 3.4 Cableado motores
Tenemos la placa protoboard de 400 puntos que están conectados internamente están conectados
- Los pines horizontales superiores e inferiores
- En este tutorial las líneas rojas serán +5V Ard
- Las líneas negras las haremos GND
- Los pines verticales del conjunto de agujeros de arriba (se han marcado 2 líneas azules) no se tocan con las otras del banco de abajo
[![2022-03-18 20_10_51-Untitled Sketch 2.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/scaled-1680-/2022-03-18-20-10-51-untitled-sketch-2-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-10-51-untitled-sketch-2-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
Esta placa protoboard cabe muy bien en el chasis **pero es justo para nuestros chips :**
- Los del driver motor B6612FNG son 8 cada lado
- Los del 7404 son 7 cada lado
- El arduino nano son 15
En total los 30 **no sobra ni falta ninguno :**
[![2022-03-18 20_14_40-Untitled Sketch.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/scaled-1680-/2022-03-18-20-14-40-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-14-40-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
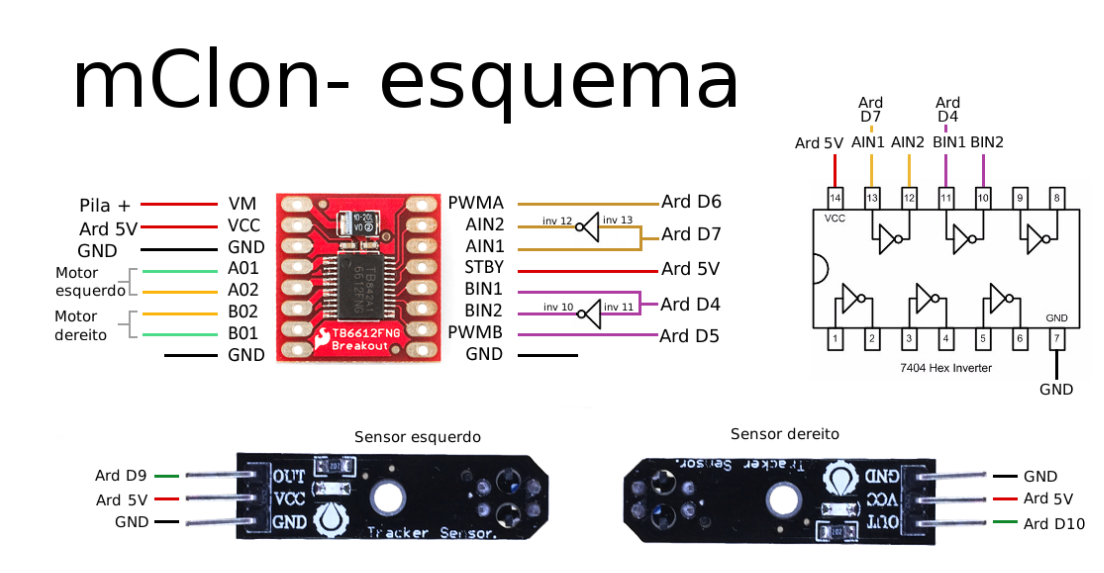
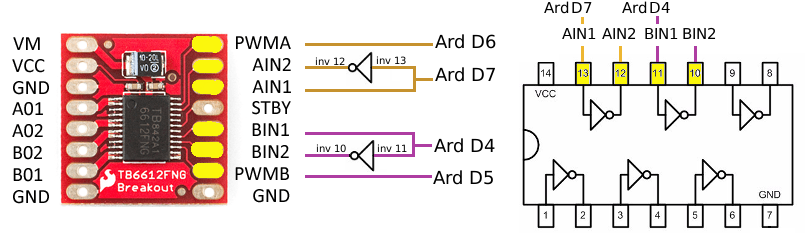
## 3.4.1 Driver motor B6612FNG y 7404
Primero conectaremos las alimentaciones :
[](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-22-11-3-4-cableado-motores-libreria-catedu.png)
*Fuente: https://mclon.org Maria L CC-BY-SA*
Al alimentar mClon con PowerBank, la tensión de la pila le llega directamente al Arduino nano, luego alimentamos **Vm con los 5V del Arduino**
*[](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-40-53-documento1-microsoft-word.png)*
Luego conectando las alimentaciones sería este dibujo, fíjate que hemos conectado un cable exterior para unir las dos líneas de 5V Ard:
[![2022-03-18 20_46_15-Untitled Sketch.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/scaled-1680-/2022-03-18-20-46-15-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-46-15-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
Esta todo muy justo, no sobra pero no falta ninguna de las 30 columnas
Asegúrate de la posición del 74HC04, la muesca tiene que mirar el Driver motor B6612FNG (el rojo):
[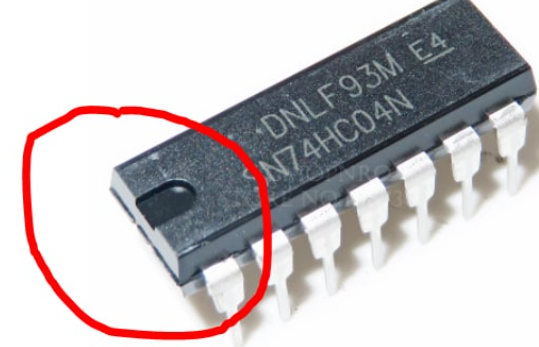](https://libros.catedu.es/uploads/images/gallery/2022-04/2022-04-24-13-26-21-telegram-web-y-2-paginas-mas-perfil-1-microsoft-edge.png)
Y ahora conectamos los pines de velocidad y de dirección :
[](https://libros.catedu.es/uploads/images/gallery/2022-02/embedded-image-pospv1jo.png)
*Fuente: https://mclon.org Maria L CC-BY-SA*
Es decir, estos cables que indican en la siguiente figura :
ATENCIÓN, no se han dibujado las conexiones anteriores, para simplificar los dibujos, es decir ,no quites los cables anteriores
Primero el motor A :
[![2022-03-18 20_28_56-Untitled Sketch.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/scaled-1680-/2022-03-18-20-28-56-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-28-56-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
Y luego el motor B
[![2022-03-18 20_32_59-Untitled Sketch.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/scaled-1680-/2022-03-18-20-32-59-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-32-59-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
Ahora conectamos los motores **OJO CON LA POLARIDAD** si te equivocas, el motor girará al revés :
[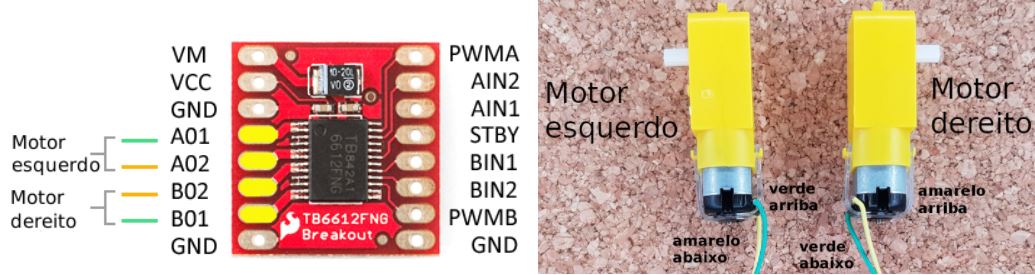](https://libros.catedu.es/uploads/images/gallery/2022-02/embedded-image-hruipiv3.jpeg)
*Fuente: https://mclon.org Maria L CC-BY-SA*
Aquí podemos poner los condensadores de 0.1µF
*[](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-21-10-56-16-window.jpg)*
*[![2022-03-21 12_05_54-MCLON.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].jpg](https://libros.catedu.es/uploads/images/gallery/2022-03/scaled-1680-/2022-03-21-12-05-54-mclon-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.jpg)](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-21-12-05-54-mclon-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.jpg)*
***P: ¿Pero a donde conecto el cable verde y amarillo? ¿Amarillos al A02 y B02 y verde A01 y B01 o al revés?**
R: El correcto es el de esta imagen, pero realmente no importa mucho, si un motor va al revés, cambia la polaridad.*
[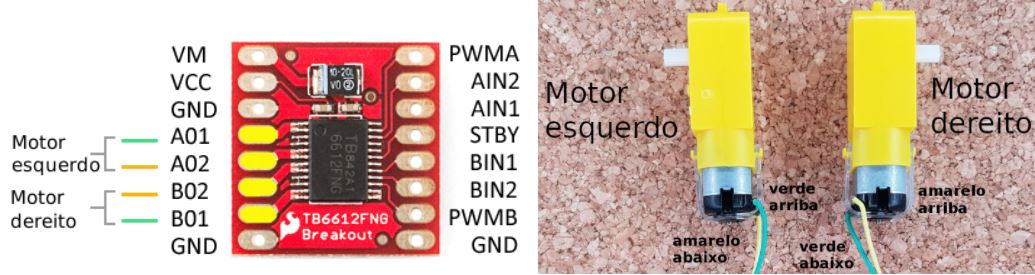](https://libros.catedu.es/uploads/images/gallery/2022-12/image-1670579615788.png)
# 3.5 Cableado sensores
## 3.5.1 Sensores de línea
Se colocan en el soporte de la cabeza loca, van justos, incluso puede ser no necesario atornillarlos. Tiene 3 pines:
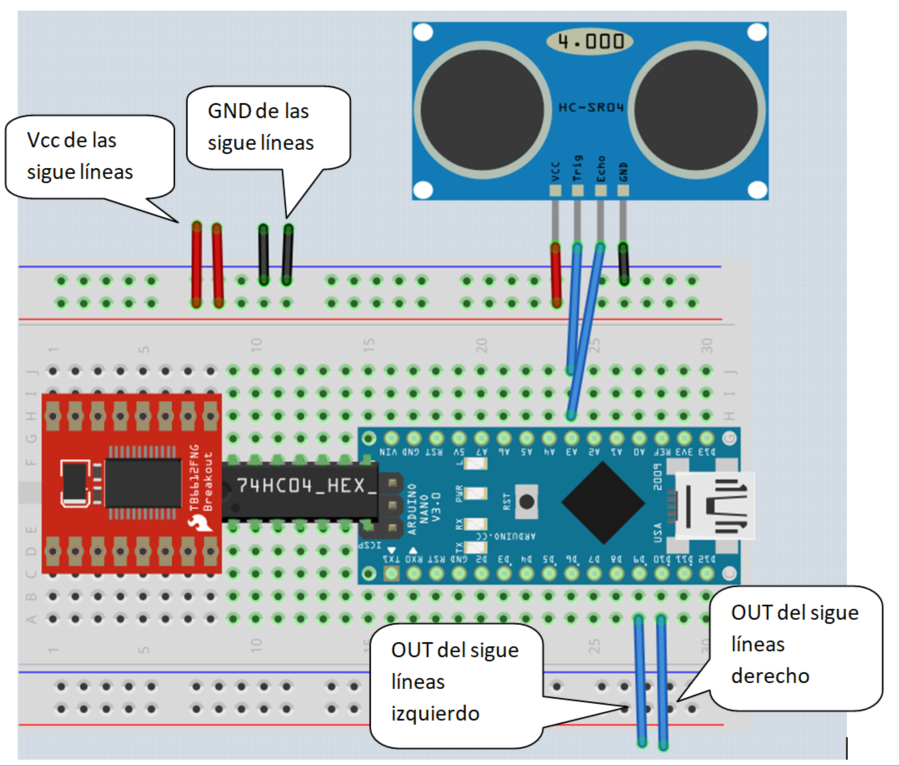
- GND al GND del Arduino, puede ser cualquier punto libre de la línea horizontal negra del capítulo anterior.
- Vcc al Ard 5V, puede ser cualquier punto libre de la línea horizontal roja vista en la primera figura del capítulo anterior.
- OUT del sensor derecho a D9 mirándolo a los ojos del ultrasonido.
- OUT del sensor izquierdo a D10 mirándolo a los ojos del ultrasonido.
[](https://libros.catedu.es/uploads/images/gallery/2022-02/embedded-image-6lnwr1nn.png)
*Fuente: https://mclon.org Maria L CC-BY-SA*
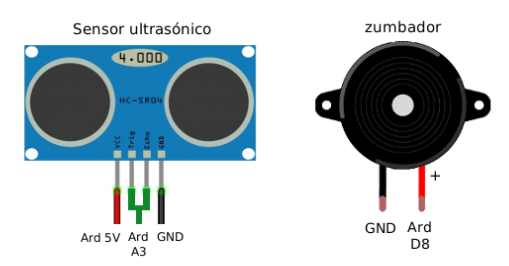
## 3.5.2 Sensor ultrasonidos
Los pines Trig y Echo del sensor **tienen que ir los dos al A3 y conectar** Vcc y GND como corresponde. Al final queda :
[](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-58-40-documento1-microsoft-word.png)
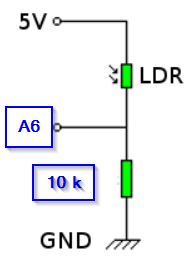
## 3.5.3 Sensor de luz LDR.
Para el sensor de luz, tenemos que hacer el siguiente esquema :
[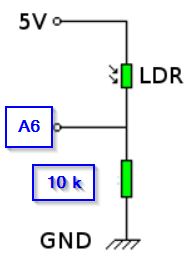](https://libros.catedu.es/uploads/images/gallery/2022-02/embedded-image-yfslgvoe.jpeg)
*Fuente: Adaptado de https://mclon.org Maria L CC-BY-SA*
Luego tenemos que hacer los siguientes empalmes, conectados con ayuda de la placa Protoboard:
- La resistencia 10k a uno de los pines del LDR y al cable que tiene que ir al A6
- Un cable Dupond al otro extremo de la R10k que irá a GND del Arduino.
- Un cable Dupond al otro extremo del LDR que irá al 5V del Arduino.
Luego sería así :
[![2022-03-18 21_05_29-Untitled Sketch.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/scaled-1680-/2022-03-18-21-05-29-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-21-05-29-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
Nuestra propuesta es de sólo **un LDR** pero recuerda que [en el capítulo 2.2](https://libros.catedu.es/books/mclon-con-nanoarduino/page/22-propuesta-mclon-vs-mbot "2 Propuesta de CATEDU mClon nanoArduino") vimos una opción de poner **dos LDRs** con interesantes propuestas y fácilmente realizable.
Por simplificación, no se ha impreso en 3D ningún soporte especial LDR al chasis, pero en[ https://tecnoloxia.org/mclon/estrutura/impresion-3d/](https://libros.catedu.es/books/mclon-con-nanoarduino/page/22-propuesta-mclon-vs-mbot) lo tienes por si quieres imprimírtelo.
# 3.6 Cableado accesorios
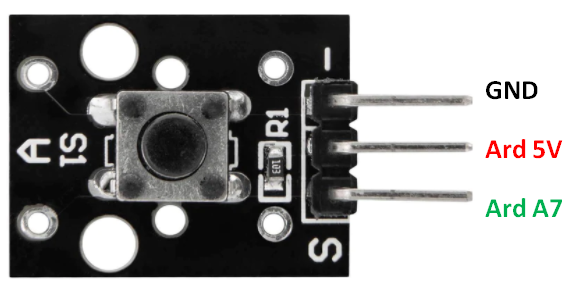
## 3.6.1 Pulsador
El pulsador lo tenemos que conectar **al A7** y su respectivo GND y Vcc a sus correspondientes GND y +5V del Arduino :
[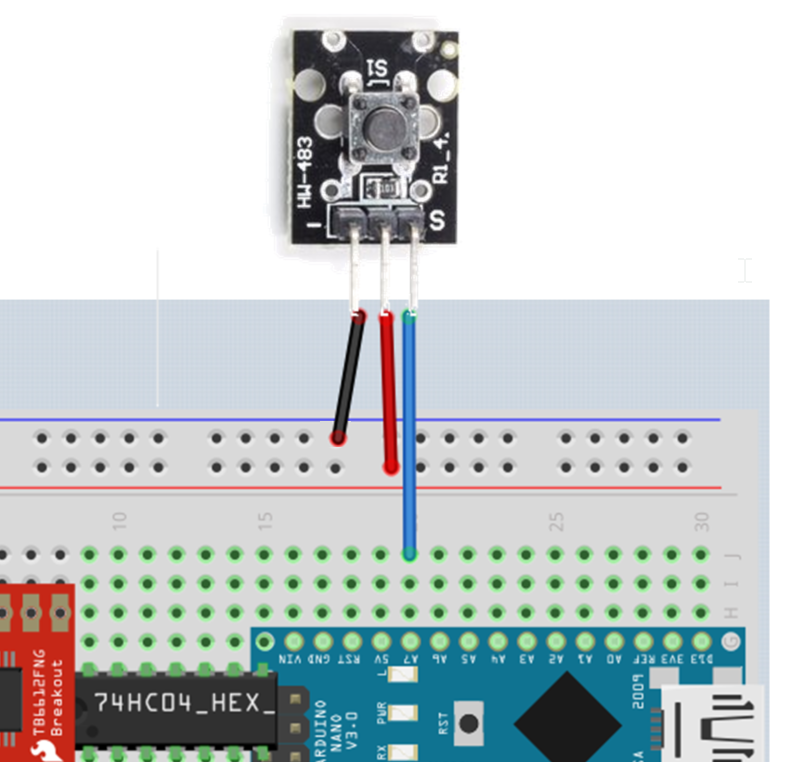](https://libros.catedu.es/uploads/images/gallery/2022-12/pulsadormclon.png)
## 3.6.2 El zumbador
Es sencillo, simplemente conéctalo a D8 y el otro a masa :
[![2022-03-21 14_22_17-MCLON.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].jpg](https://libros.catedu.es/uploads/images/gallery/2022-03/scaled-1680-/2022-03-21-14-22-17-mclon-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.jpg)](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-21-14-22-17-mclon-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.jpg)
A veces la conexión con los cables Dupont hembra falla, luego recomendamos **quitar** la caperuza de plástico negra para asegurar la conexión como en la foto.
Otra cosa que nos tenemos que fijar es cual es el + y cual es el - *(aunque realmente da igual pues son pasivos)*
[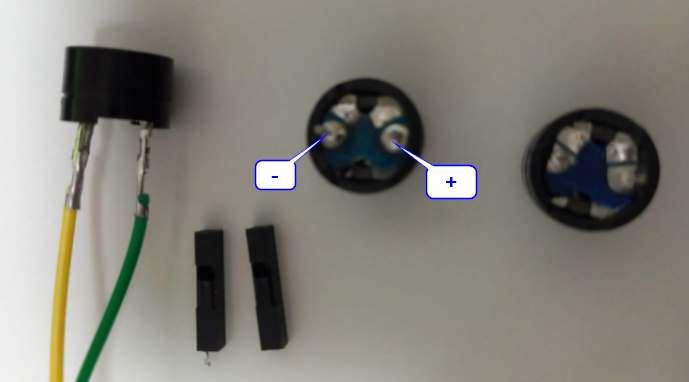](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-28-20-22-11-window.jpg)
# 3.7 Cableado extras
{{@3334}}
# 4. Testeo mClon con nanoArduino
# 4.1 Con mBlock
{{@3335}}
# 4.2 Testeo con mBlock de motores
{{@3336}}
# 4.3 Testeo con mBlock de los sensores
{{@3337}}
# 4.4 Testeo con mBlock accesorios
{{@3338}}
# 4.5 Test de los extras
{{@3339}}
# 4.6 Testeo con mBlock
Proponemos este test completo de todos los componentes y actuadores
- Actuadores
- Motores
- Sensores
- Sensor ultrasónico
- Sensores sigue-líneas
- Sensor luz
- Accesorios
- Botón
- Buzzer
- Extras
- Leds RGB
- Brazo
La propuesta es A MCLON LE GUSTA LA MARCHA PERO NO LE GUSTA EL ALCOHOL :
1. Si se pulsa el botón comienza el programa
2. Que el mClon realice un circuito siguelíneas (puedes descargartelo imprimiento estos 4 ficheros Word en este [enlace](https://drive.google.com/drive/folders/1D8vIUNfCDCvM_04RG5HMXtUEGcaBmnTI?usp=sharing) )
3. Si en el camino encuentra una lata, la retira
4. Si se hace de noche, se pone a cantar
- Programa con mBlock versión Web en [https://planet.mblock.cc/project/1504279](https://planet.mblock.cc/project/1504279)
- Programa con mBlock version 5x en [https://drive.google.com/drive/folders/1D8vIUNfCDCvM\_04RG5HMXtUEGcaBmnTI?usp=sharing](https://drive.google.com/drive/folders/1D8vIUNfCDCvM_04RG5HMXtUEGcaBmnTI?usp=sharing)
- Programa con mBlock version 3x en [https://drive.google.com/drive/folders/1D8vIUNfCDCvM\_04RG5HMXtUEGcaBmnTI?usp=sharing](https://drive.google.com/drive/folders/1D8vIUNfCDCvM_04RG5HMXtUEGcaBmnTI?usp=sharing)
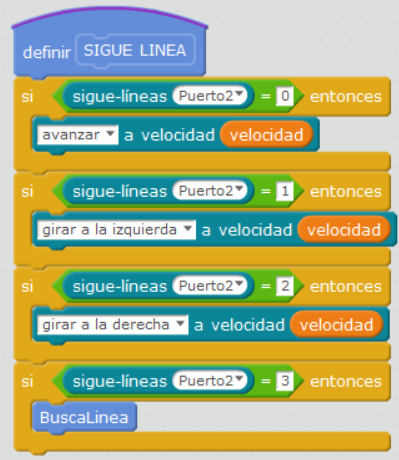
### Explicación del programa:
Tiene varios bloques definidos, este bloque **SIGUE LINEA** cumple la función de seguir la línea negra, pero si detecta un 3, llama al bloque **Buscalinea** pues está fuera del circuito:
[](https://libros.catedu.es/uploads/images/gallery/2022-02/embedded-image-extgiptk.png)
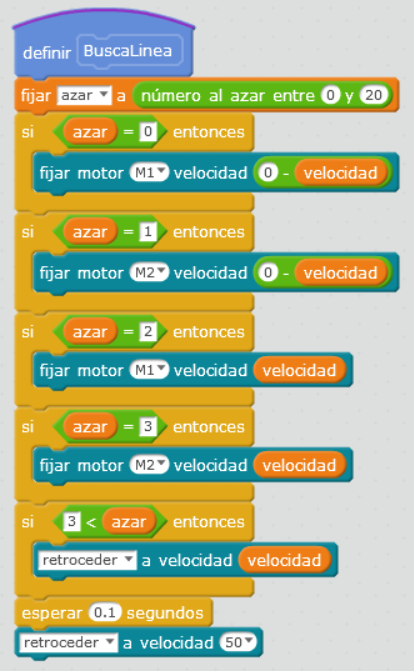
El bloque **BuscaLinea** elige un número al azar y el 80% de veces retrocede a buscarlo, el otro 20% busca girando. Esto se hace así porque algunas veces se queda "atascado" hacia delante y hacia atrás, ese 20% es para romper ese ciclo vicioso.
[](https://libros.catedu.es/uploads/images/gallery/2022-02/embedded-image-y6sr2hhq.png)
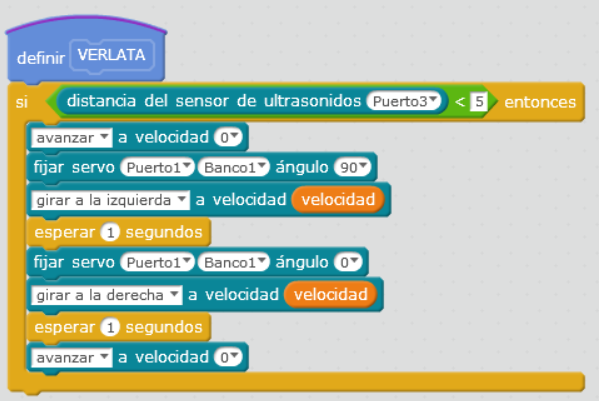
La función **VERLATA** mira si hay una lata delante, y en ese caso la retira :
[](https://libros.catedu.es/uploads/images/gallery/2022-02/embedded-image-oirzatxs.png)
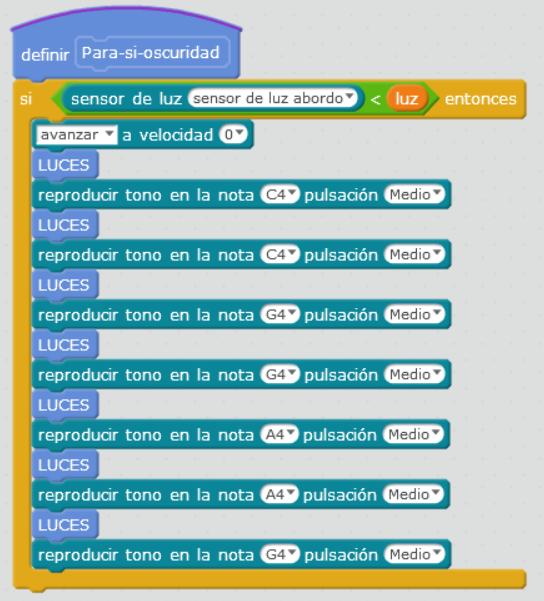
La función **Para-si-oscuridad** esta basado en [este vídeo,](https://www.youtube.com/watch?v=p9543Fjx4sM) se detiene en el caso de que se apaguen las luces y reproduce un juego de luces con RGB y sonidos con el Buzzer:
[](https://libros.catedu.es/uploads/images/gallery/2022-02/embedded-image-fxanticd.png)
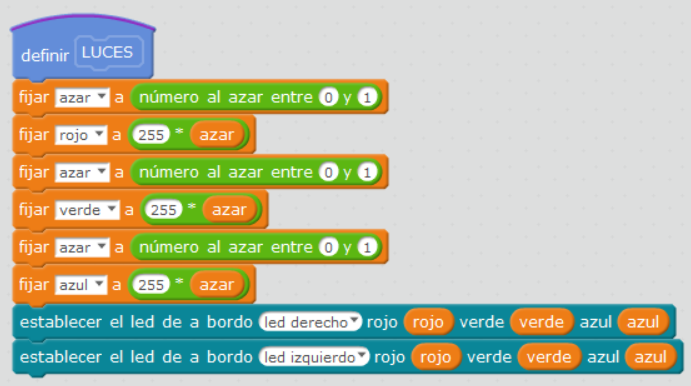
Donde el bloque **LUCES** enciende los RGB al azar
[](https://libros.catedu.es/uploads/images/gallery/2022-02/embedded-image-rh5z25a7.png)
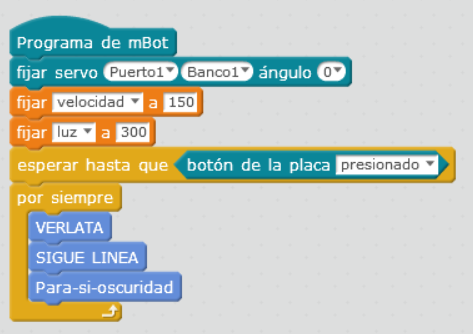
Finalmente el programa principal que llama a todos los bloques es
[](https://libros.catedu.es/uploads/images/gallery/2022-02/embedded-image-onlqtsv2.png)
Donde tenemos que definir:
- La variable **velocidad** si es muy alta puede saltarse el circuito, si es muy baja puede que los motores no tengan suficiente fuerza para arrancar, depende del estado del PowerBank
- La variable **luz** que depende de las condiciones de la habitación, hay que elegir un valor lo suficientemente alto para que la luz detectada por el LDR sea mayor cuando las luces de la habitación están encendidas, y lo suficientemente baja para que cuando se apaguen, el valor medido por el LDR este más bajo de ese valor.
Para la variable **luz** recomendamos usar el programa visto en [4.3 Testeo sensores](https://libros.catedu.es/books/mclon-con-nanoarduino/page/43-testeo-con-mblock-de-los-sensores "4.3 Testeo con mBlock de los sensores")
En la página[ https://mclon.org/](https://mclon.org/) puedes encontrar interesantes propuestas en el apartado mBlock :
- Movimiento https://tecnoloxia.org/mclon/o-robot-en-movemento/
- Cerramiento en línea https://tecnoloxia.org/mclon/recinto-con-lina-2/
- Sigue líneas https://tecnoloxia.org/mclon/unha-lina-no-chan/
- Detectar objetos https://tecnoloxia.org/mclon/detectar-obxectos/
- Luces RGB https://tecnoloxia.org/mclon/extras/luces-de-cores/
- Brazo robótico https://tecnoloxia.org/mclon/extras/brazo/
- Siguiendo una luz https://tecnoloxia.org/mclon/extras/seguindo-a-luz/
# 4.7 Test con IDE
{{@3341}}
# Muro
En este **Padlet** [https://padlet.com/CATEDU/mclon](https://padlet.com/CATEDU/mclon) puedes poner tus ejemplos o ejemplos que veas interesante para mostrar a los demás
[](https://padlet.com?ref=embed)
# Grupo telegram mClon
Para **mClon** hay un grupo de Telegram :
[mClonRobot](http://t.me/mClonRobot)

Y un canal de Twitter @mClonRobot
# Pensamiento computacional
¿Dónde se encaja este robot?¿se puede comparar este robot con otros robots de otros cursos que hacemos desde CATEDU?
Esta es la hoja de ruta que proponemos, no se tiene que tomar al pie de la letra, pero intenta ayudar al profesorado que tenga una visión global de tanta oferta:
Como se puede ver **mClon** es una alternativa muy buena y barata para de **mBot** que encaja muy bien a diferentes edades de primaria y secundaria
Guía orientativa
Tenemos un **grupo Telegram Robótica Educativa en Aragón**, [https://t.me/roboticaeducativaaragon](https://t.me/roboticaeducativaaragon)

# Creditos
Adaptado de [https://mclon.org/](https://mclon.org/) por Javier Quintana CATEDU.
Autores de [https://mclon.org/](https://mclon.org/):
- **María Loureiro**. Catedrática de Tecnología en IES Primeiro de Marzo, Baiona. @tecnoloxia
- **Bernardo Álvarez**. Catedrático de Tecnología en IES de Teis, Vigo. @biober
- **Miguel Gesteiro**. Maker, Vigo. mgesteiro
**Licencia: CC-BY-SA**
**[](https://libros.catedu.es/uploads/images/gallery/2022-03/cc-by-sa-icon-1.png)**
[](https://libros.catedu.es/uploads/images/gallery/2022-03/image-1648462225402.gif)
[](https://libros.catedu.es/uploads/images/gallery/2022-03/image-1648462299882.png)