# 3. Ya!!!
# 3. Evitar obstáculos
## Reto Roomba
Programa al mBot para que sea capaz de evitar cualquier obstáculo, paredes... usando el sensor de ultrasonidos, aunque el del vídeo le ha puesto sirena!!
**Fuente: Autor**
##### Solución
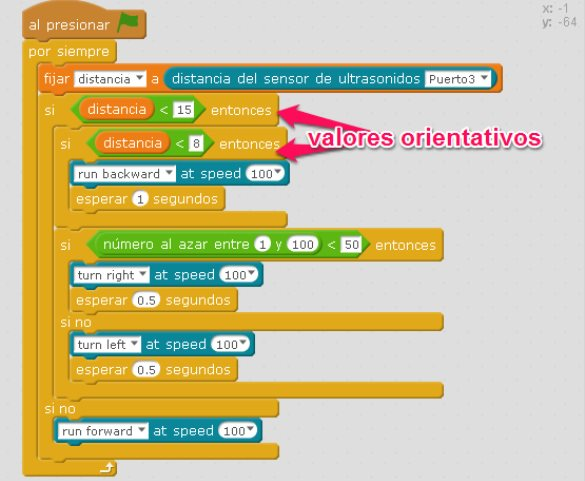
Solución sencillota:

Solución super-avanzada:
*Al azar gira o derecha o izquierda* Si el obstáculo persiste a estar cerca (menos de 8cm) pues que recula un poco.
Entre una y otra solución hay varias intermedias.
**Fuente: Captura de pantalla mBlock. Programa: el autor.**
Una opción es salir de un laberinto, [página descarga piezas 3D](http://www.thingiverse.com/thing:1169585)
Pero no le pongas cosas encima
[via GIPHY](https://giphy.com/gifs/baby-oscar-roomba-HqtdH0m61NBSg)
# 3.1 Upload to Arduino
## ¿Por qué?
Si queremos que nuestro programa funcione **independiente** del ordenador, es decir grabar nuestro programa en el Arduino del mbot, y que funcione, claro!
También si queremos que nuestro mBot funcione más rápido, mejor o si "Dependiendo del ordenador" no hace las cosas del todo bien.
## Esto tiene una pega
En nuestro programa no podemos utilizar ningún comando propio de Scratch, es decir por ejemplo en **Aparencia "Decir Hello"** pues corresponde al personaje "panda" del programa Scratch-mBlock
## ¿Cómo se hace?
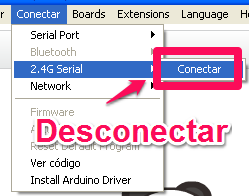
- Desconectamos nuestro mbot del ordenador, la conexión inalámbrica que teníamos
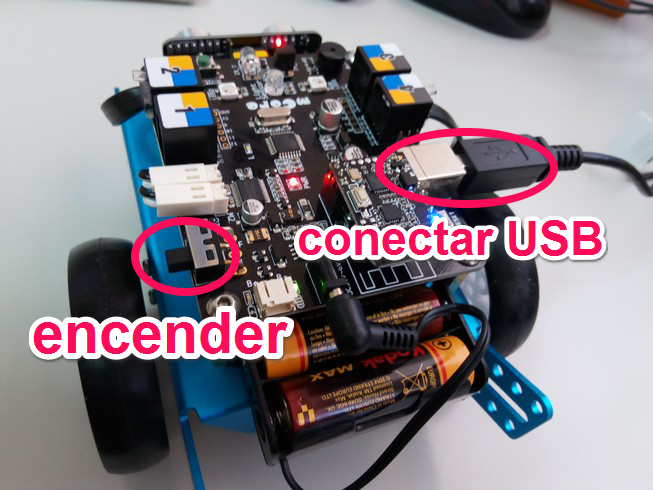
- Conectamos el mbot con el cable USB y encendemos:
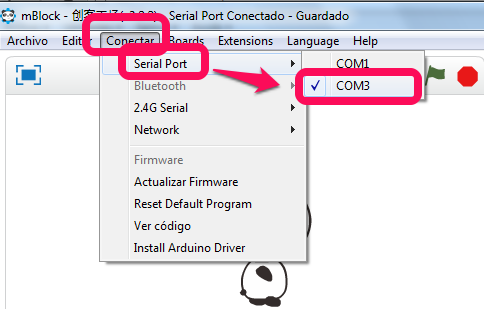
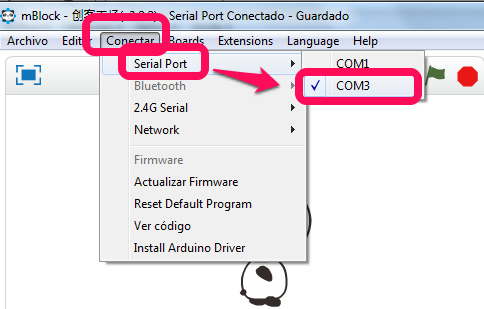
- Conectamos el mblock con mbot por el puerto serie, automáticamente pone el puerto que ha detectado, porque antes hemos dado a instalar el driver del Arduino, será el último puerto que se ha instalado (en la foto COM3):
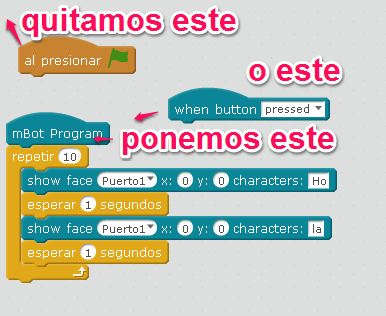
- Cambiamos en nuestro programa el comienzo del programa (el de la bandera) por uno propio del robot:
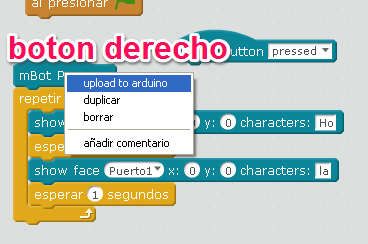
- Con el botón derecho, pinchamos en el mBot program y elegimos Upload Arduino, o más fácil en **Editar- Modo Arduino**:
- Se nos abrirá una ventana con el CODIGO PARA GRABARLO EN EL ARDUINO DEL ROBOT, incluso PODEMOS MODIFICAR LO QUE QUERAMOS, le damos a UPLOAD TU ARDUINO
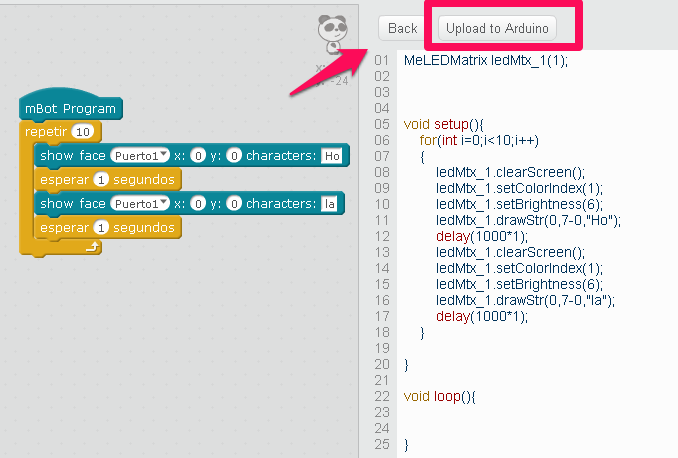
CURIOSIDADES: El código que aparece a la derecha es código de Arduino, lo podemos modificar si sabemos, y si no sabemos... pues podemos hacer nuestros atrevimientos ¿qué pasaría si en el anterior código cambiamos SetBrightness(6) por SetBrightness(3) ? pues que la matriz brilla menos!!
- **YA ESTÁ** si dice un mensaje de que se ha grabado correctamente PODEMOS FUNCIONAR EL PROGRAMA DEL ROBOT SIN EL ORDENADOR ENCENDIDO!!, podemos quitar el cable usb y nuestro robot funciona independiente.
## Al terminar, deja las cosas como estaban,
No sea que el siguiente quiera utilizar el robot de forma "dependiendo del ordenador" y se encuentra que funciona con tu programa
Tenemos que QUITAR EL PROGRAMA que hemos instalado sino no puede volver a conectarse con el mBlock usando la bandera por ejemplo.
- Conectar el cable (ver paso 2)
- Conectar mBlock por el puerto serie (ver paso 3)
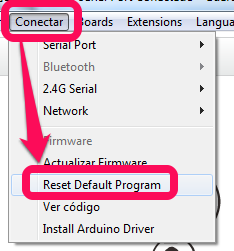
- Reseteamos el arduino, esto quitará nuestro programa y pone deja el robot como estaba antes:
**Fuente de las imágenes: Captura de pantalla de mBlock. Las fotos: El autor.**
¿te has liado? no me extraña, un vídeo a ver si te aclaras:
## ¿Y si hay algún problema?
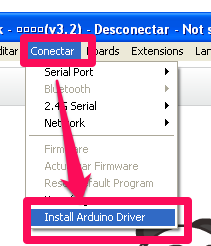
Puede ser que nuestro Windows no reconozca mBot (o sea, no reconozca la placa Arduino) para eso, instalamos el Arduino Driver en nuestro programa mBlock:
## ¿Y si siguen los problemas?
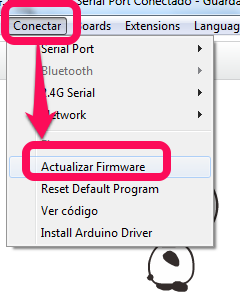
Por si acaso han sacado una nueva actualización vamos a **Actualizar el firmware**:
1. Conectamos el robot con el cable y encendemos
2. En mBlock Conectar-Puerto serie- elegimos el último puerto que se ha creado al conectar el robot (en la foto COM3)
3. En mBlock Conectar-Actualizar firmware
# 3.2 Quiero saber más
No te pierdas este libro **Libro gratuito en Español** [Divirtiéndome con mBot ( PDF 145 páginas 14.5Mb )](https://www.dropbox.com/s/kx2qq756dutn955/divirtiendome_con_mbot__espa%C3%B1ol.pdf?dl=1)
# 3.3 Deja las cosas como estaban
No estaría nada mal que antes de devolver mBot lo devolvieses con la configuración de fábrica
Si no te acuerdas aquí lo tienes en [flash ](http://aularagon.catedu.es/materialesaularagon2013/mbot/video/DejarmBotcomoNuevo.htm)o aquí en [pdf](http://aularagon.catedu.es/materialesaularagon2013/mbot/video/DejarmBotcomoNuevo.pdf)
# 3.4 Muro
No te cortes !! muestra a los demás alumnos tus ejemplos :
[](https://padlet.com?ref=embed)
# Grupo Robótica educativa Aragón
{{@4982}}
# Creditos
2017 por [CATEDU ](/www.catedu.es)(Javier Quintana Peiró).
{{@3195}}