Cutebot
Montaje del kit
a primera vez que se usa el kit viene sin montar, el ensamblaje es muy sencillo, mira este vídeo sobre todo a partir del minuto 2:00
Cutebot - Modelo educativo by GmedranoTIC on Sketchfab
Dos prácticas con Cutebot
Mira este vídeo:
- Del 0 al minuto 5:20 muestra cómo es Cutebot, montaje, y cararcterísticas
- 5:21 al 9:13 Práctica 1: Luces y giros : con los botones activa motores y luces
- 9:14 al final Práctica 2: Ultrasonidos: esquiva obstáculos con efecto sonoro luminoso
Agradecimientos a Guillermo Medrano gmedranotic.wordpress.com @GmedranoTIC autor de Logros en Educación https://gmedranotic.wordpress.com/2023/05/15/iniciacion-robotica-basica-dos-practicas-con-cutebot/ Licencia CC-BY-NC-SA
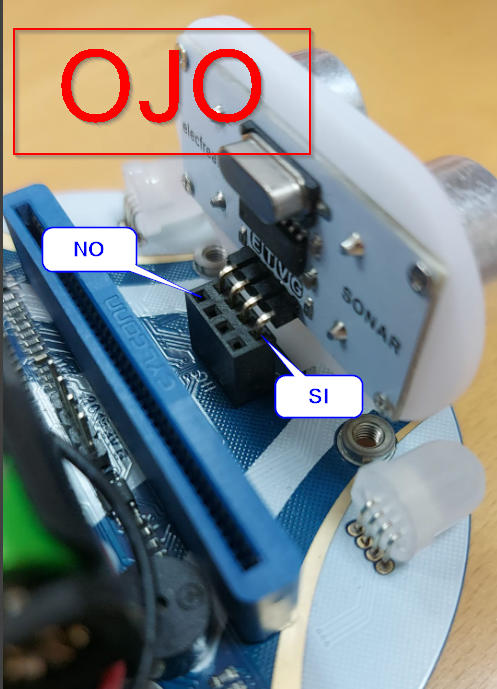
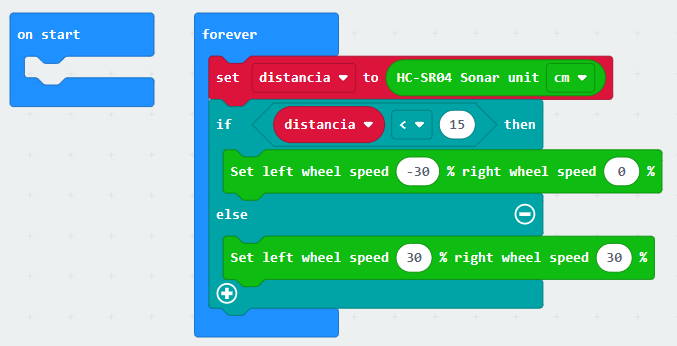
Recomendamos que lo hagas, no son largos de realizar. Si la de ultrasonidos quieres algo sencillo evita obstáculos, puedes simplificarla al máximo:
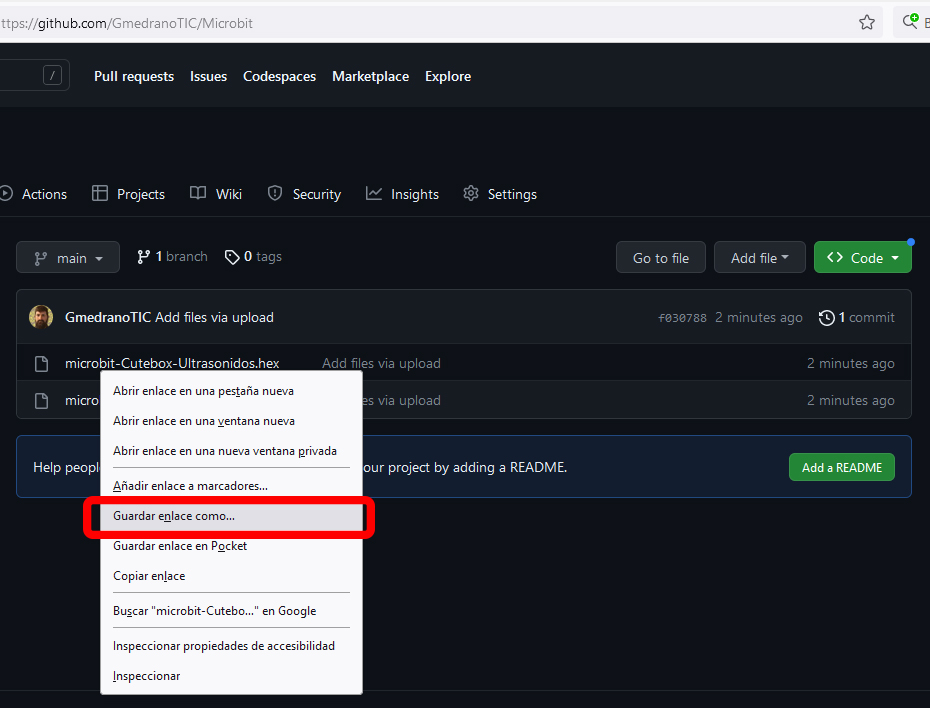
Las dos prácticas del vídeo se pueden descargar en https://github.com/GmedranoTIC/Microbit, directamente seleccionando el archivo y pinchando con el botón derecho, «guardar enlace como»
Más prácticas con Cutebot
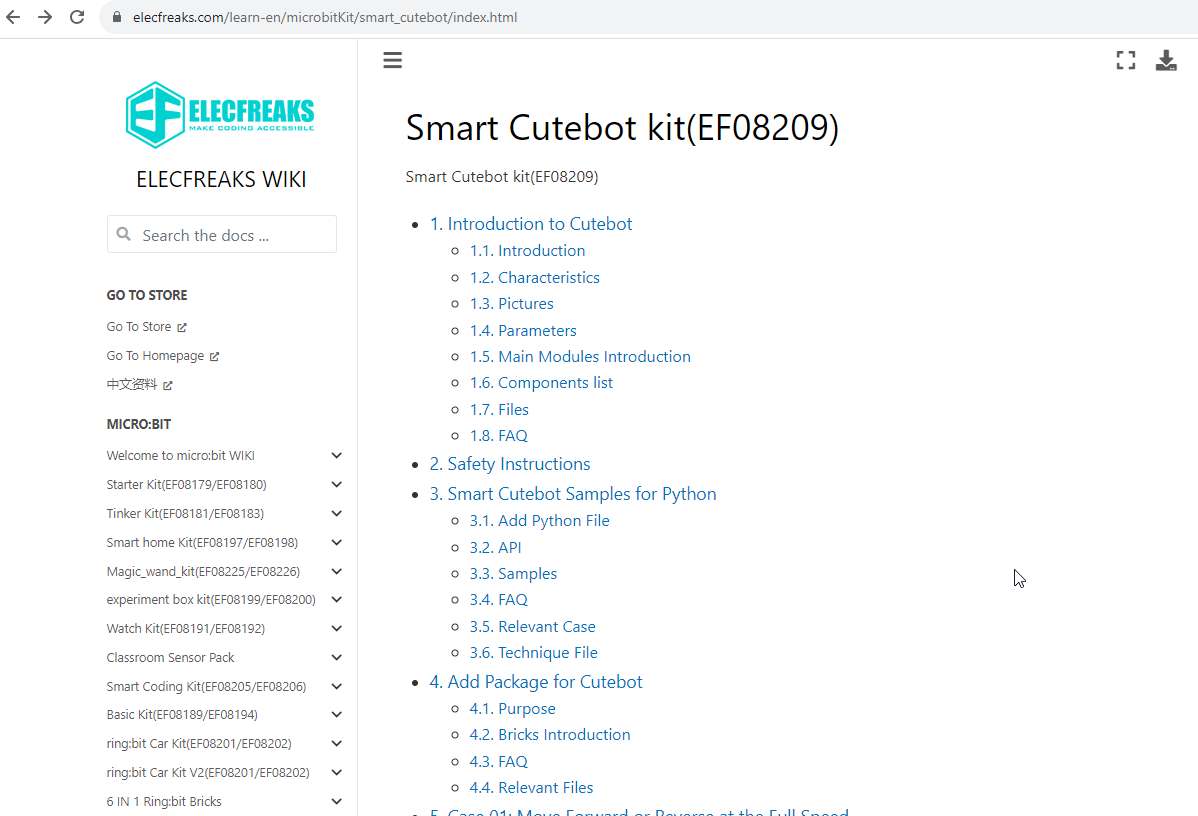
En la wiki de la empresa de Cutebot: Elecfreaks https://elecfreaks.com/learn-en/microbitKit/smart_cutebot/index.html encontrarás 14 prácticas muy interesantes, que no podemos reproducir en este libro por tener los derechos reservados :
- Case 01: Move Forward or Reverse at the Full Speed
- Una práctica sencilla que según el botón que aprietas en en microbit ejecuta una velocidad u otra
- Case 02: Speed Up Gradually
- El cutebot va ganando velocidad
- Case 03: Dance in Figure-of-eight
- El cutebot hace el recorrido de un 8
- Case 04: Run at Random
- El cutebot danza de forma aleatoria
- Case 05: Automatic Headlights.
- Si es de noche, se encienden las luces
- Case 06: Steering&Clearance Lamps.
- Según los botones, las lámparas flashean 5 veces
- Case 07: Fall-arrest Cutebot.
- En la wiki pone que el propósito es que cuando detecta el borde de la mesa, vuelve atrás y gira. ATENCIÓN no aconsejable hacerlo en una mesa, por el peligro de caída, se recomienda hacer una figura cerrada con cinta negra y el cutebot no saldrá del recinto.
- Case 08: Run Along the Black Line.
- El típico siguelíneas
- El típico siguelíneas
- Case 09: Autonomous Obstacle Avoidance.
- El típico salva-obstáculos
- Case 10: Car Following with A Fixed Distance.
- Cutebot se mueve siguiendo tu mano, manteniendo una distancia fija.
- Case 11: micro:bit Remote Control.
- coche teledirigido con otro microbit y los botones
- coche teledirigido con otro microbit y los botones
- Case 12: Remote Control the Cutebot with micro:bit Accelerometer.
- el mismo ejemplo pero usando el acelerómetro (inclinación) en vez de los botones
- (omitimos este ejemplo pues requiere un joystick no proporcionado en el kit)
- Case 14: IR Remote Control Car.
-
- coche teledirigido pero con el mando IR
-
- Case15: Seeking the Light.
- Cutebot sigue la luz
Hay más retos pero con accesorios que no se proporciona en el kit básico
AI Lens Elecfreak
Existe en Aularagón un curso completo para manejar la AI LENS Elecfreack con Cutebot
Ver la web en https://libros.catedu.es/books/cutebotai-lens
Para maqueen hay que utilizar otro tipo de soporte, ver https://libros.catedu.es/books/cutebotai-lens/page/soporte
