# Microbit + car
Curso de Microbit con la posibilidad de usar un cochecito (sensor distancia y siguelineas)
Se trabajan distintas marcas
# Introducción
# Objetivos y contenidos
#### **CONTENIDOS**:
- - **Introducción**
- **La placa Microbit**
- Conocer la placa Microbit
- Retos con la placa Microbit
- **Cars para Microbit**
- **MAQUEEN**
- Primeros pasos con Maqueen
- Retos Maqueen
- **CUTEBOT**
- Primeros pasos y retos con Cutebot
- **SMARTCAR** (obsoleto)
#### **OBJETIVOS**
Conocer la placa MICROBIT, sus posibilidades didácticas junto con la gamificación de añadir la placa a un robot tipo suelo, (en el curso se llama CAR por hacerlo genérico independientemente de la marca de robot a utilizar), ampliando las posibilidades de la MICROBIT con movimiento y con la interacción de obstáculos y sigue líneas además de otras posibilidades (luces, sonido, expansión....) realizando un completo conocimiento de la didáctica del pensamiento computacional y de la robótica para nivel de primaria-secundaria usando programación por bloques accesible a un amplio alumnado.
# Pensamiento computacional
¿Dónde se encaja este robot? ¿Se puede comparar este robot con otros robots de otros cursos que hacemos desde CATEDU?
Esta es la hoja de ruta que proponemos, no se tiene que tomar al pie de la letra, pero intenta ayudar al profesorado que tenga una visión global de tanta oferta robótica:
Como se puede ver **MICROBIT+CAR** tiene la ventaja de ser una buena relación calidad/precio de los robots de suelo, con muchas posibilidades.
{{@4518}}
# Lenguajes de programación
Micro:bit se puede programar
- Por bloques principalmente con Makecode
- Por código principalmente Python
{{@13859}}
# Robótica y accesibilidad
{{@7565}}
# Muro Microbit+car
Este [muro](https://padlet.com/jjquintana1/microCAR) es para que puedas poner ejemplos interesantes del uso de la microbit con un robot tipo coche
[](https://padlet.com?ref=embed)
# Microbit
# ¿Qué es la microbit?
{{@10887}}
# Aprender pensando y aprender haciendo
{{@10891}}
# Descripción de la placa micro:bit
{{@10888}}
# Accesorios para micro:bit
{{@10904}}
# El entorno de trabajo de MakeCode
{{@10889}}
# Nuestro primer programa
{{@10890}}
# Kits que amplían la microbit
Desde CATEDU recomendamos estos kits
##### **SMART HOME KEYSTUDIO**
Recomendamos este kit SMART HOME PARA MICRO:BIT que está en un curso en AULARAGÓN en este enlace [https://libros.catedu.es/books/smart-home-para-microbit](https://libros.catedu.es/books/smart-home-para-microbit)
[](https://libros.catedu.es/uploads/images/gallery/2025-11/smarthomemicrobit.png)
##### **Agricultura inteligente**
Una alternativa a la casa domótica es una granja : [https://tienda.bricogeek.com/kits-microbit/1666-kit-agricultura-inteligente-para-microbit.html](https://tienda.bricogeek.com/kits-microbit/1666-kit-agricultura-inteligente-para-microbit.html)
[](https://libros.catedu.es/uploads/images/gallery/2025-05/2025-05-13-12-11-19-kit-agricultura-inteligente-para-micro-bit-elecfreaks-ef08254-bricogeek-com.png)
Pero hay que añadirle la granja : [https://tienda.bricogeek.com/kits-microbit/1792-granja-de-carton-para-iot-con-microbit.html](https://tienda.bricogeek.com/kits-microbit/1792-granja-de-carton-para-iot-con-microbit.html)
[](https://libros.catedu.es/uploads/images/gallery/2025-05/2025-05-13-12-11-45-granja-de-carton-para-iot-con-micro-bit-elecfreaks-ef08269-bricogeek-com.png)
# Retos con microbit
# Panel LED
{{@3225}}
# Jugando con los LED: bloques básicos de código
{{@10892}}
# Sensor temperatura
{{@3226}}
# Sensor luminosidad y sonido
{{@3227}}
# Pulsadores
{{@10898}}
# Acelerómetro
{{@3229}}
# Brújula
{{@3230}}
# Radio
{{@3231}}
# Pines entrada y salida
{{@3232}}
# Retos avanzados con micro:bit
# Mejorando el termómetro
{{@10894}}
# Aprender con un led la diferencia entre analógico y digital
Vamos a conectar un led, el pin corto (-) al GND y el otro al pin0
[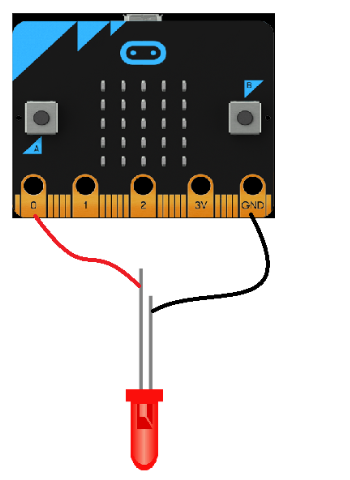](https://libros.catedu.es/uploads/images/gallery/2024-06/2024-06-02-20-13-07-copia-de-wednesday-presentaciones-de-google.png)
*Ulrich Pedersen Dah & Ture Reimer-Mattesen Center for Underisningsmidler CPU*
Vamos a ver la diferencia entre estos dos métodos de encender y apagar la luz
[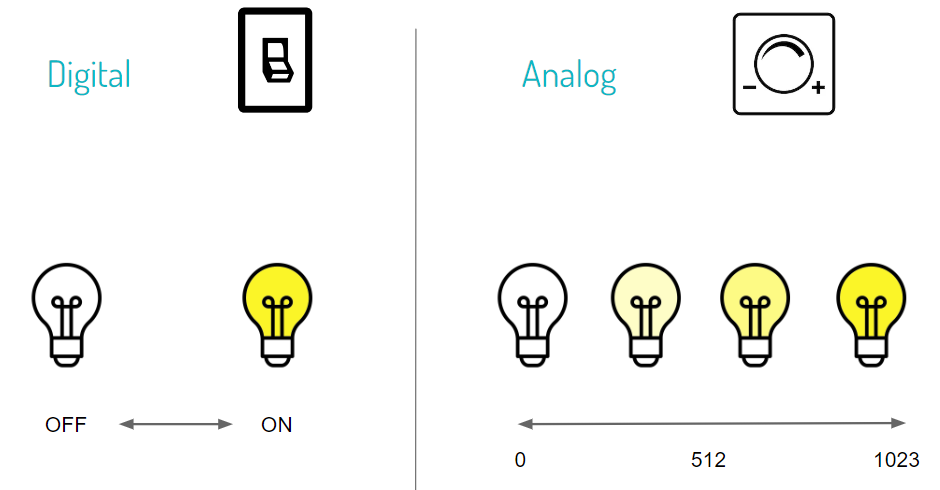](https://libros.catedu.es/uploads/images/gallery/2024-06/2024-06-02-20-14-07-copia-de-wednesday-presentaciones-de-google.png)
*Ulrich Pedersen Dah & Ture Reimer-Mattesen Center for Underisningsmidler CPU*
El programa en digital es sencillo
[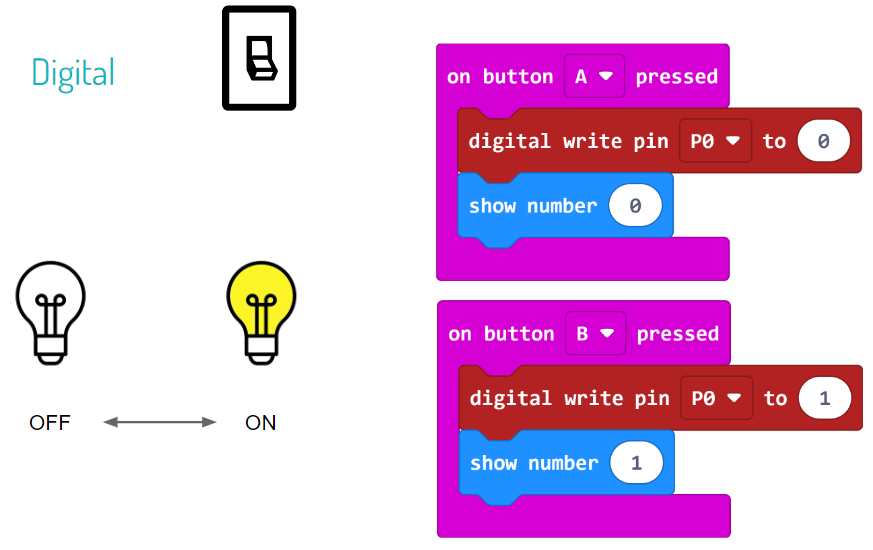](https://libros.catedu.es/uploads/images/gallery/2024-06/2024-06-02-20-14-57-copia-de-wednesday-presentaciones-de-google.png)
*Ulrich Pedersen Dah & Ture Reimer-Mattesen Center for Underisningsmidler CPU*
Y el programa en analógico
[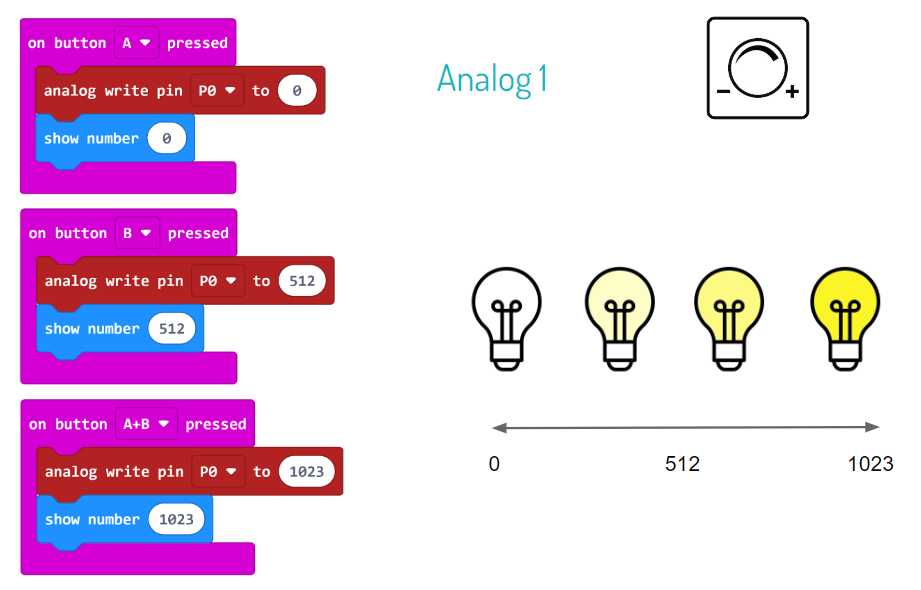](https://libros.catedu.es/uploads/images/gallery/2024-06/2024-06-02-20-33-34-copia-de-wednesday-presentaciones-de-google.png)
*Ulrich Pedersen Dah & Ture Reimer-Mattesen Center for Underisningsmidler CPU*
# Bloques de entradas: sonómetro, magnetómetro y acelerómetro con una sola línea de código
{{@10893}}
# Nivel de burbuja usando el giroscopio
{{@10897}}
# Lectura puerto USB por MakeCode o Coolterm
Podemos enviar datos por el puerto USB y visualizarlos en el ordenador
**Hemos elegido el sensor de luz, pero PUEDE SER CUALQUIER SENSOR**
##### **METODO VISUALIZACIÓN EN EL MISMO MAKECODE**Debajo del simulador podemos ver una evolución de los datos que lee[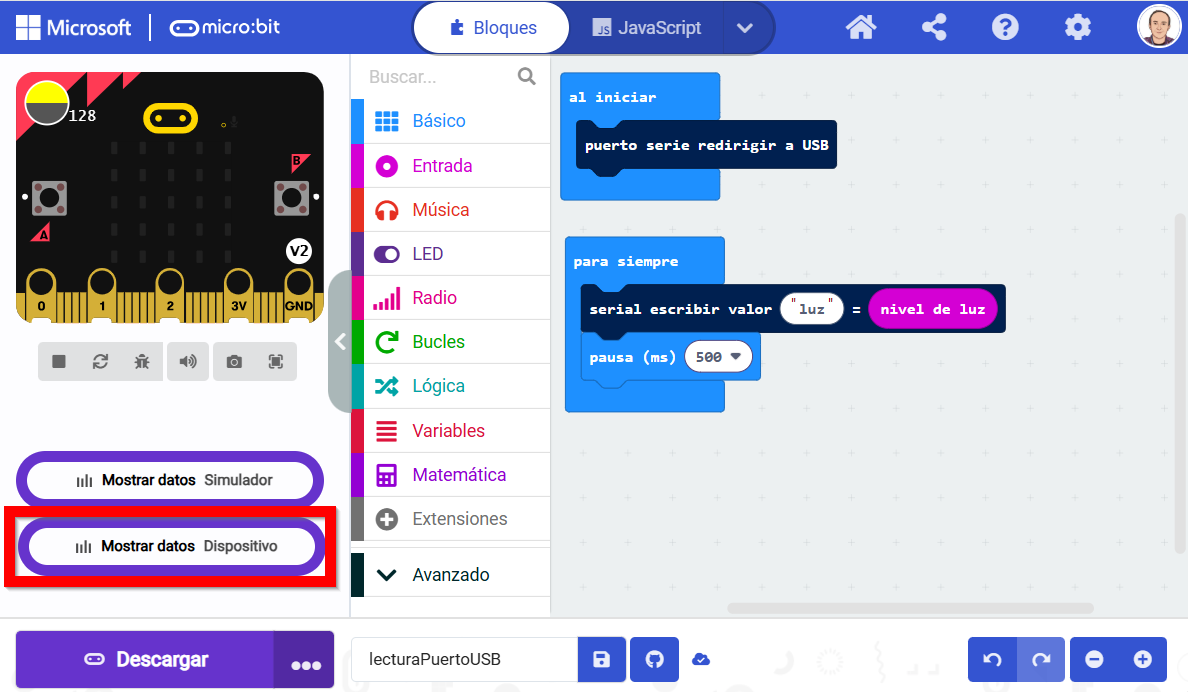](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-20-31-54.png)y el resultado es muy visual
##### **METODO COOLTERM**
Este método es utilizando un programa que lo podemos descargar en esta página [https://freeware.the-meiers.org/](https://freeware.the-meiers.org/)
[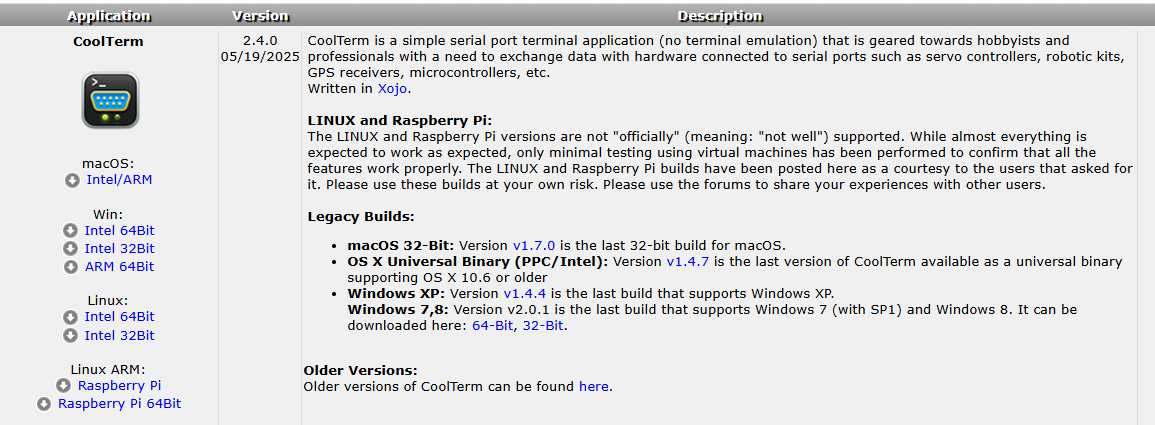](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-20-33-40-greenshot.png)
Es un programa libre, y portable, es decir es una carpeta con un ejecutable y programas accesorios
[](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-20-34-32-greenshot.png)
lo ejecutamos
[](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-20-35-26-cooltermwin64bit-explorador-de-archivos.png)
En Connection - Options
[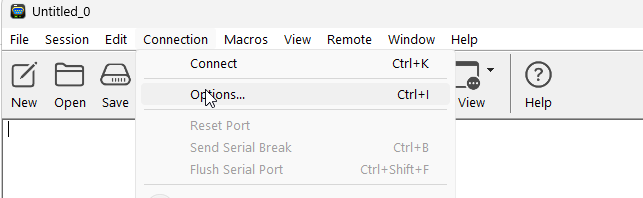](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-20-36-05-untitled-0.png)
Subimos la velocidad a 115.200 baudios
[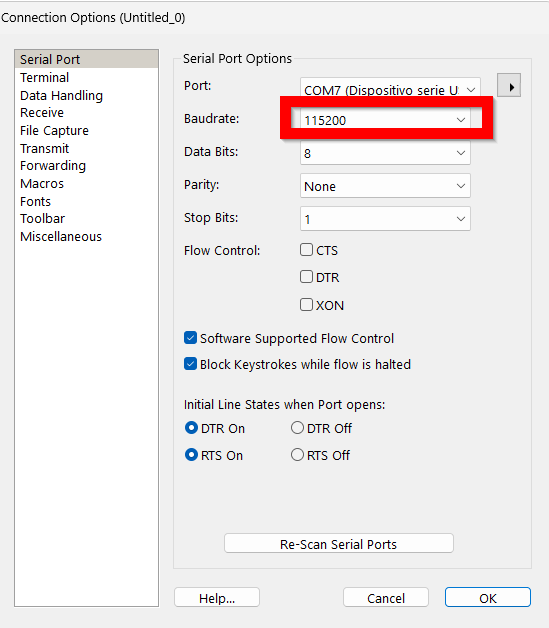](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-20-36-40-connection-options-untitled-0.png)
Al darle a **conectar** se ven los datos numéricamente
[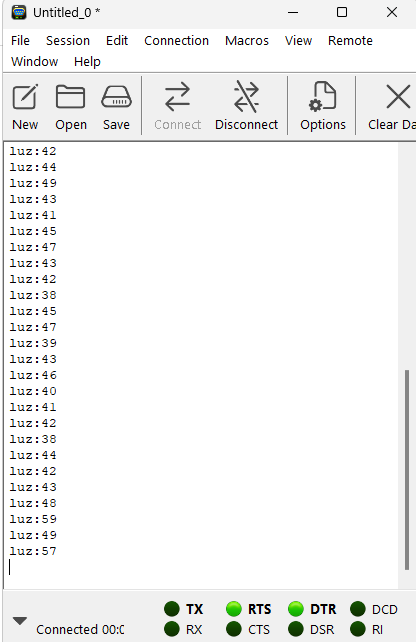](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-20-37-48-untitled-0.png)
LA VENTAJA DE COOLTERM ES QUE LEE CUALQUIER DISPOSITIVO (MICRO:BIT, ARDUINO, ECHIDNA....)
# BLUETOOTH un poco de teoría
{{@7221}}
# BLUETOOTH extensión en Makecode
En Makecode instalaremos la siguiente extensión
Entramos en **Extensiones**
[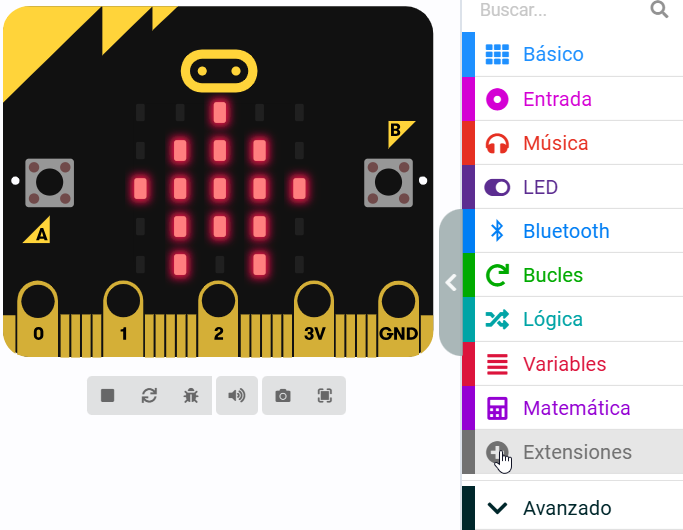](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-21-37-10-greenshot.png)
Buscamos **Bluetooth** y elegimos la esta :
[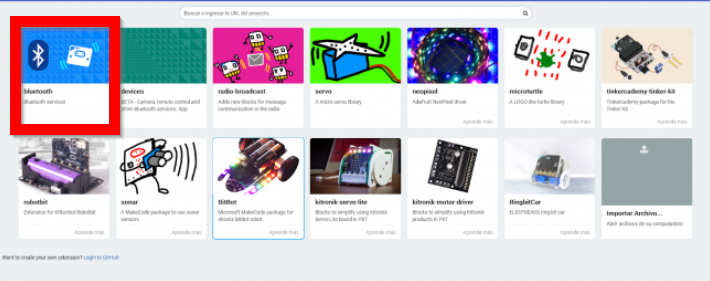](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-21-41-46-greenshot.png)
Nos dirá que es incompatible con la radio, y hay que eliminar la radio y poner Bluetotth, aceptamos :
[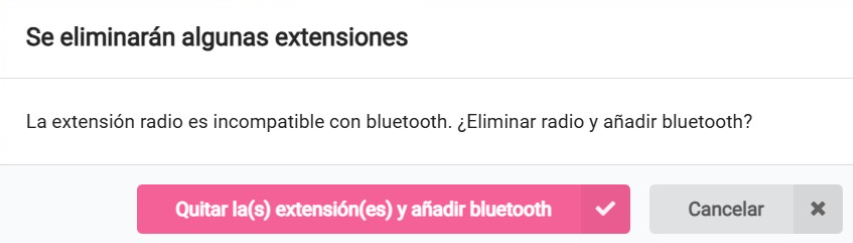](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-21-43-22.png)
##### **Por si acaso...**
En Makecode, si vamos a la rueda dentada - Project settings
[](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-05-09-44-34-configuracion.png)
Hay que tener que cualquiera se puede conectar via Bluetooth
[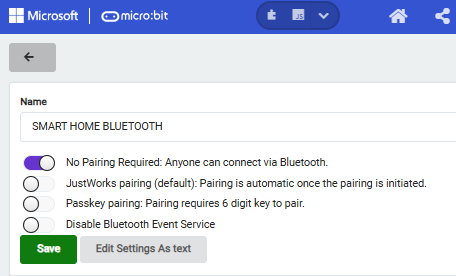](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-05-09-45-48-configuracion.png)
# BLUETOOTH programa en Makecode
Realizamos un programa que :
- En **inicio**
- se active el servicio UART para el envío y recepción de mensajes,
- muestra un mensaje del nombre de la micro:bit, ver más abajo
- **Al conectar Bluetooth** que muestre un check
- **Al desconectar Bluetooth** que muestre X
- **Al recibir datos**, hasta # (puede ser otro carácter) que muestre la frase recibida
- **Al presionar el botón A**
- Que muestre un mensaje
- Que muestre la temperatura
**¿Para qué mostrar el nombre de la micro:bit?** Para saber a qué micro:bit conectarte. En una clase con muchas micro:bit es importante este dato. El nombre del equipo está en
[](https://libros.catedu.es/uploads/images/gallery/2026-01/2026-01-09-16-36-45-greenshot.png)
# BLUETOOTH programa Serial Bluetooth Terminal
Entramos con el móvil a Google Play e instalamos esta aplicación [https://play.google.com/store/apps/details?id=de.kai\_morich.serial\_bluetooth\_terminal](https://play.google.com/store/apps/details?id=de.kai_morich.serial_bluetooth_terminal)
[](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-21-50-49-greenshot.png)
Tiene la ventaja de
- **Enviar** mensajes
- **Recibir** mensajes
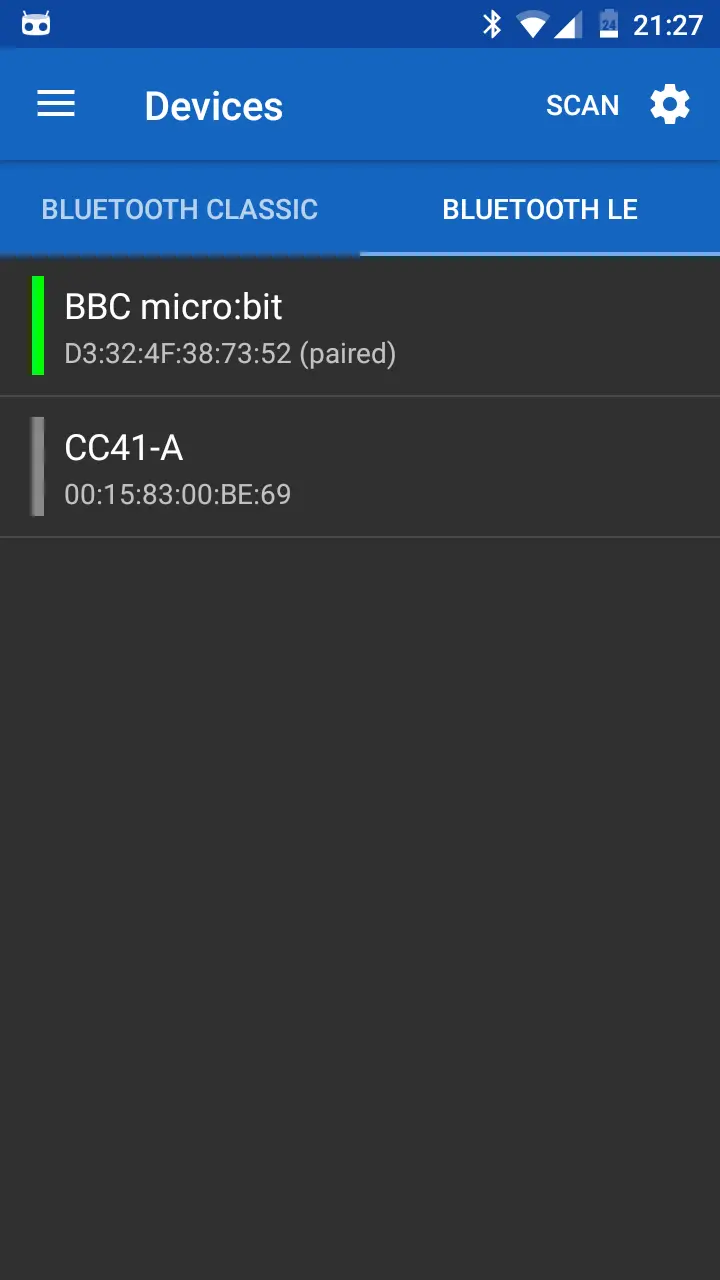
- Permitir conexiones **BLUETOOTH LE** (Low emision) **que es lo que utiliza MICRO:BIT**
Entramos en **Devices** y en **Bluetooth LE** y nos conectamos a la Micro:bit
[](https://libros.catedu.es/uploads/images/gallery/2025-11/unnamed.webp)
Una vez conectado, podemos:
- enviar un mensaje, que como hemos definido anteriomente en Makecode tiene que ir entre #
- recibir un mensaje, se visuaizará lo que nos envíe la micro:bit que en Makecode lo hemos programado al apretar el botón A
# BLUETOOTH con App Inventor. Extensiones
##### **Descargas e instalación**Necesitamos estas extensiones para poder crear una APP que pueda enviar y recibir con nuestra micro:bitPágina de descargas [https://iot.appinventor.mit.edu/#/](https://iot.appinventor.mit.edu/#/)[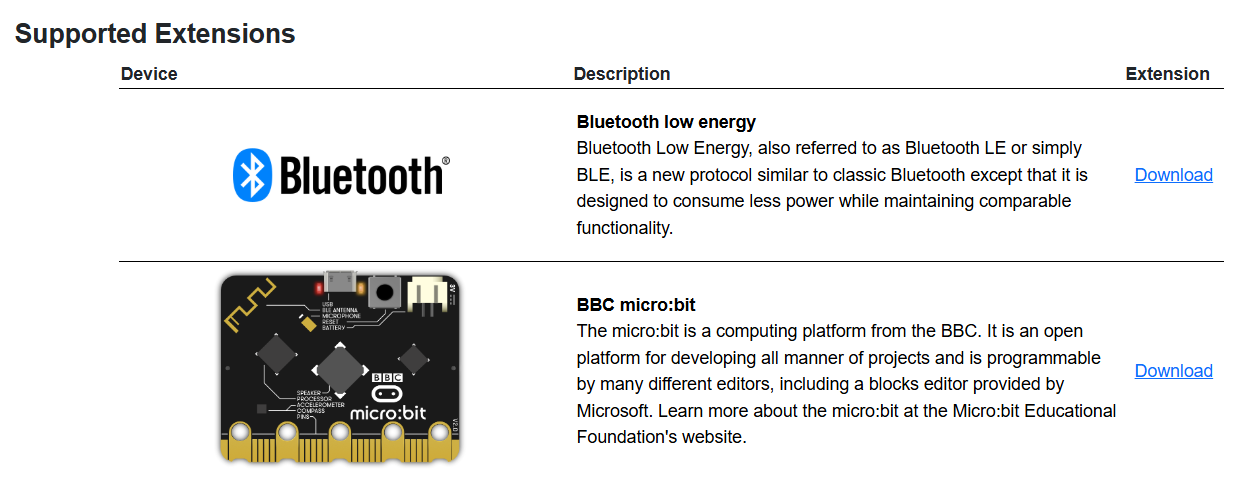](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-22-05-10.png)Una vez descargadas, vamos al APP INVENTOR [https://ai2.appinventor.mit.edu](https://ai2.appinventor.mit.edu) y las instalamos en extensiones :[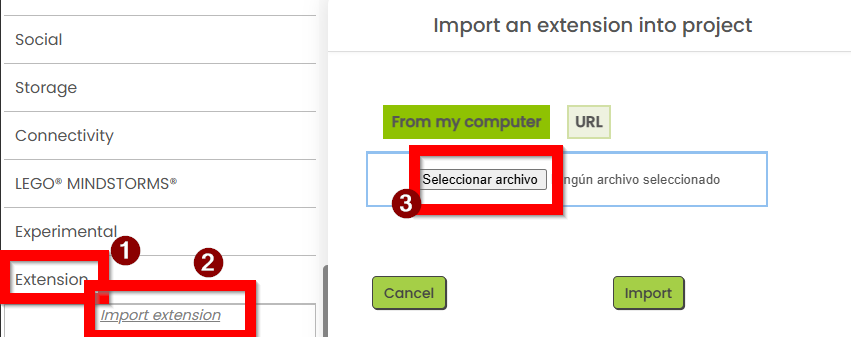](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-22-08-33-mattermost-desktop-app.png)
Una vez instaladas, se visualizan como extensiones abajo del menú. Las dos últimas son las que utilizaremos:
[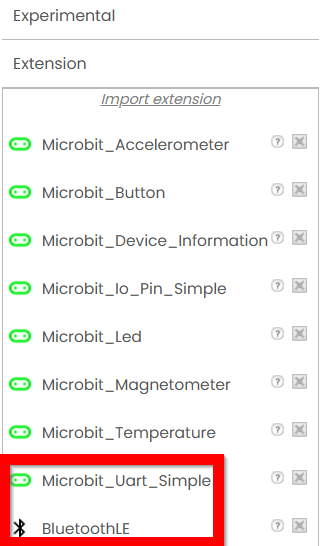](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-22-10-51.png)
La extensión Bluetooth tiene diversas funciones que tienes su descripción [aquí ](https://iot.appinventor.mit.edu/iot/reference/bluetoothle)(English). Para poder instalarla, vamos al APP INVENTOR [https://ai2.appinventor.mit.edu](https://ai2.appinventor.mit.edu)
# Avanzado BLUETOOTH App Inventor programa
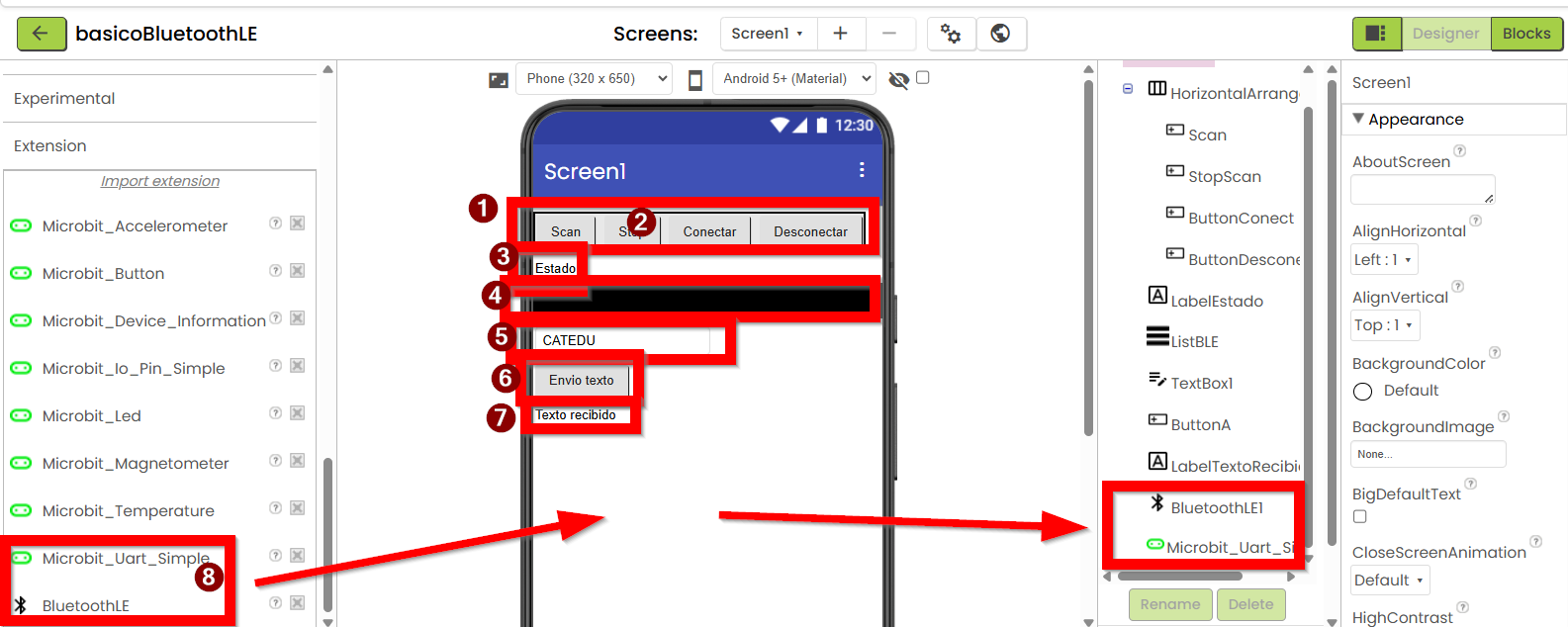
##### **En DESIGNER**
incorporamos:
1. **HorizontalArrangment** para que los botones queden alineados horizontalmente
2. **Botones**
1. Scan
2. Stop
3. Conectar
4. Desconectar
3. **Label** que dirá el estado de la conexión. Lo llamaremos **LabelEstado**
4. **ListView** que lo llamaremos **ListBLE** donde mostrará los diferentes dispositivos Bluetooth LE que detecta
5. **TextBox** para poner el texto que queramos a enviar a micro:bit
6. Un **botón Enviar** el texto anterior
7. Un **Label** que lo llamaremos **LabelTextoRecibido** que mostrará el mensaje desde micro:bit
8. Añadimos los elementos de las extensiones que hemos instalado anteriormente
1. Microbit\_UART\_Simple
2. BluetoothLE
[](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-22-13-06-mattermost-desktop-app.png)
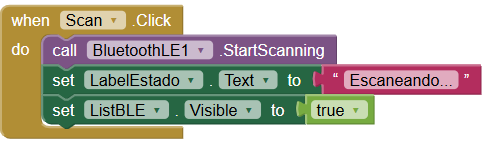
##### **En Blocks**
Cuando escaneemos, que el elemento empiece el escaneado y la lista se vuelva visible, además de que LabelEstado diga que esta escaneando
[](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-22-24-04-greenshot.png)
Si ha encontrado un dispositivo, que lo vaya añadiendo a la lista ListBLE
[](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-22-25-21-mattermost-desktop-app.png)
Cuando le digamos que pare, simplemente se lo mandamos al dispositivo y LabelEstado lo informa
[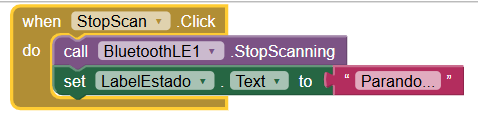](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-22-24-44-mattermost-desktop-app.png)
Cuando le demos a conectar, pues conecta con el seleccionado en ListBLE y LabelEstado informa
[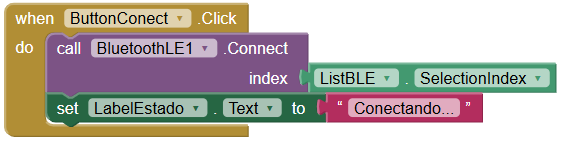](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-22-25-49-greenshot.png)
Si conecta, pues LabelEstado informa y ListBLE no es necesaria por lo tanto se oculta, pues entorpece la visión
[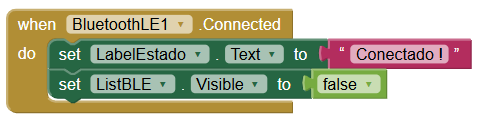](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-22-26-36-greenshot.png)
Si queremos desconectar, pues le decimos al elemento BluetoothLE que desconecte
[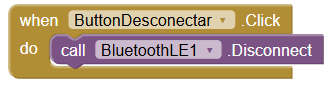](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-22-27-31-greenshot.png)
Si se ha desconectado (voluntariamente al dar al botón anterior, o involuntariamente pues el dispositivo se ha desconectado, o esta muy lejos... etc) que informe
[](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-22-28-08-mattermost-desktop-app.png)
Si apretamos el botón enviar, le enviamos el texto que esta en TextBox entre "#" pues así lo hemos definido en el programa Makecode
[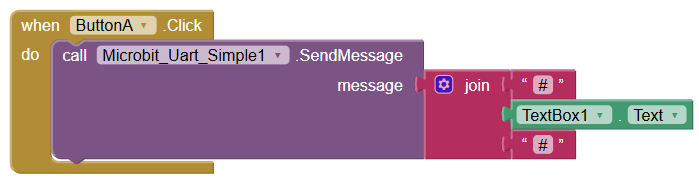](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-22-30-07-mattermost-desktop-app.png)
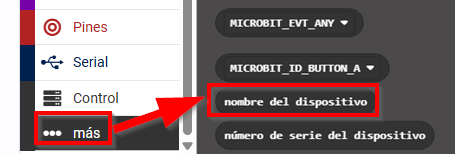
Si se ha recibido un mensaje, pues que lo visualice, pero primero comprueba que el mensaje no este vacío
NOTA el mensaje "**message**" lo arrastras desde la instrucción "**when**.." tal y como señala la línea roja
[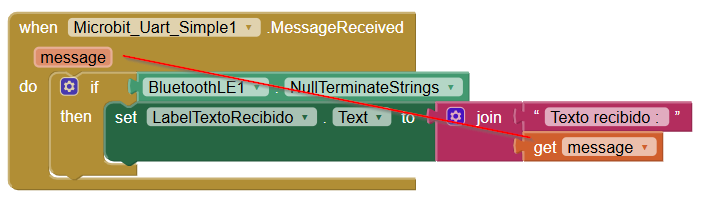](https://libros.catedu.es/uploads/images/gallery/2025-11/2025-11-02-22-30-57-mattermost-desktop-app.png)
**[basicoBluetoothLE.aia](https://libros.catedu.es/attachments/241)**
##### **La APP a tu móvil**
{{@11546}}
##### **A jugar...**
# Música y sonido con micro:bit
# Una pequeña melodía
{{@10903}}
# Grabadora de sonidos
{{@10899}}
# Fray Santiago
{{@10900}}
# Controles de volumen, tempo y tono
{{@10901}}
# Create AI
# Qué es CreateAI
[](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-13-16-32-03-greenshot.png)
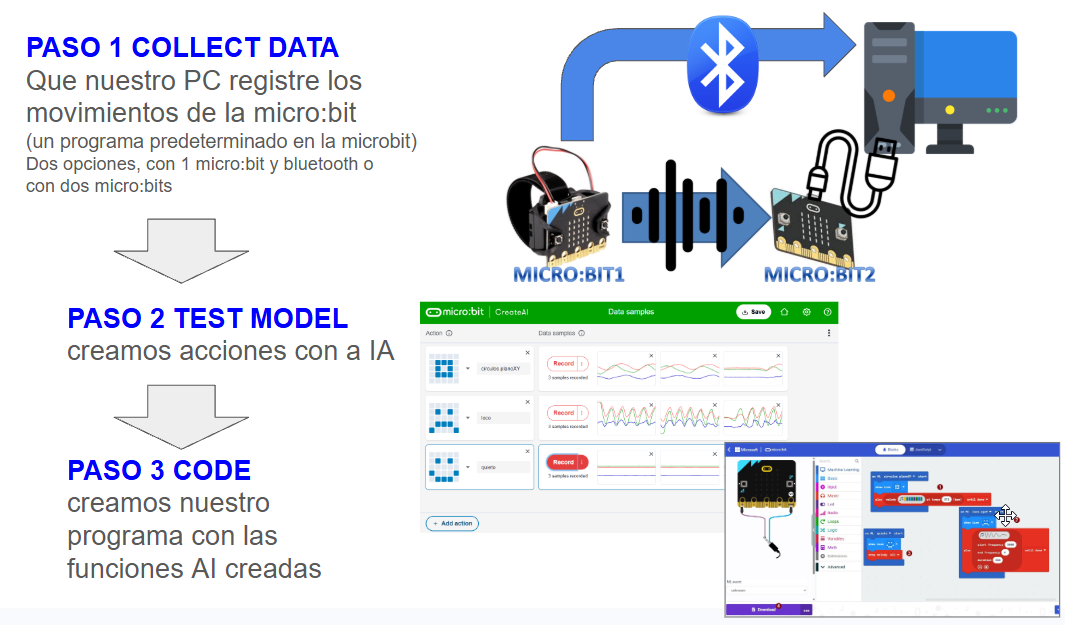
Es una aplicación web en a [https://createai.microbit.org/](https://createai.microbit.org/) ideada para realizar estos pasos:
1. Registrar los **datos del acelerómetro** de la micro:bit. *En la web lo llaman paso* **Collect data**
2. Crear una **máquina ML** de Inteligencia Artificial que aprenda de los datos capturados *En la web lo llaman paso* **Test model**
3. Generar instrucciones para poderlos usar en **Makecode** *En la web lo llaman paso* **Code**
Es decir, crea una máquina **Machine Learning ML etiquetado** ( [¿No sabes lo que es eso?](https://libros.catedu.es/books/robotica-educativa-con-mbot/page/ia-tipos) ) para reconocer diferentes acciones del acelerómetro de micro:bit
ATENCIÓN, HAY DOS PROGRAMAS QUE SE CARGAN EN LA MICRO:BIT Y DIFERENTES CONEXIONES QUE CREA CONFUSIÓN :
- En el paso **collect data** se carga un programa en la micro:bit predeterminado que sólo sirve para que CreateAI lea los datos del acelerómetro. Aquí hace falta una conexión por cable USB pues es cargar el programa predeterminado en la micro:bit
- Al final del paso **collect data** y en el paso **Test model **se necesita una conexión inalámbrica para tener libertad de movimientos pues CreateAI necesita leer los datos para aprender con IA y crear la máquina ML:
- Opción una micro:bit y conexión Bluetooth
- Opción dos micro:bits en el caso que no se tenga Bluetooth
- En el paso **Code** creamos nuestro programa utilizando las instrucciones creadas con IA en la máquina ML. Aquí hace falta una conexión por cable USB pues es cargar nuestro programa en la micro:bit
[](https://libros.catedu.es/uploads/images/gallery/2026-06/2026-06-07-11-18-15-catedu-kdbx-keepass.png)
# Vestibles
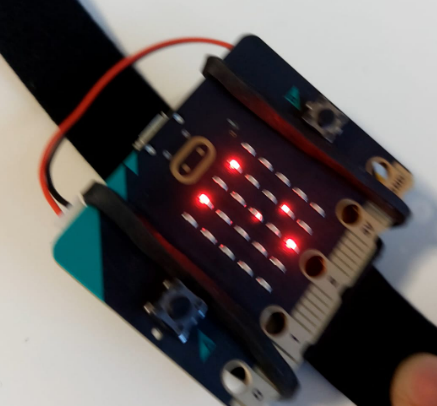
Para proyectos con CreateAI es recomendable fijar la micro:bit a una pulsera.
[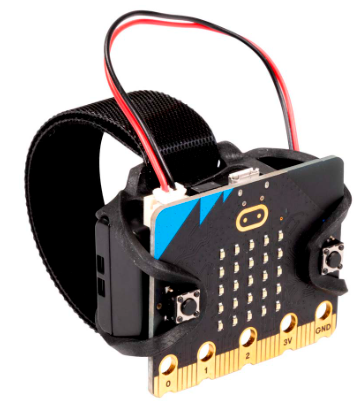](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-14-08-35-58-greenshot.png)[](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-14-08-36-28-greenshot.png)
[Fuente Ro-botica aprox 2€](https://www.ro-botica.com/es/p/1531715.80)
[](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-14-08-43-48-whatsapp.png)
Otro Modelo Elecfreaks aprox 10-15€ :
O modelos "maker" reciclando un trozo de tele de un vaquero y de una camiseta y un velcro. Instrucciones en [https://www.instructables.com/Microbit-DIY-Smart-Watch/](https://www.instructables.com/Microbit-DIY-Smart-Watch/)
# Paso 1 Collect data por Bluetooth y 1 micro:bit
Si trabajamos con un PC sin bluetooth no puedes usar esta página, mira [esta página](https://libros.catedu.es/books/microbit-car/page/sin-bluetooth-y-2-microbit)
##### **Conectamos nuestra micro:bit con CreateAI**
Nos vamos a[ https://createai.microbit.org/](https://createai.microbit.org/) a **Get started** [](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-13-16-32-03-greenshot.png)
**New session** si es la primera vez, sino puedes ir al anterior grabada con las otras opciones
[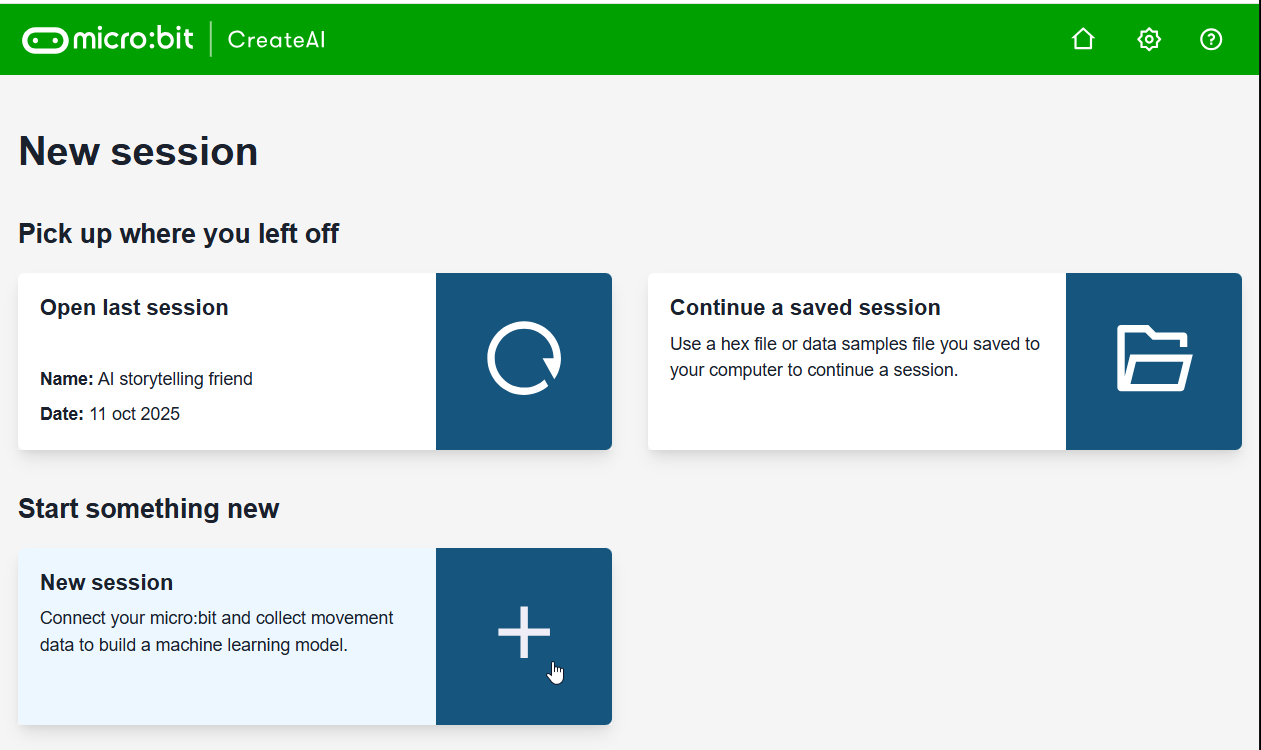](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-13-16-32-52-greenshot.png)
conectamos nuestra microbit con un cable USB y le damos a **Connect**
[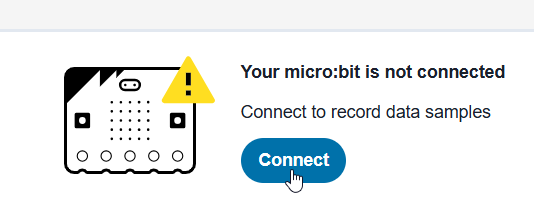](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-13-16-34-26-greenshot.png)
Si detecta conexión de Bluetooth, te mostrará la siguiente pantalla (usar 1 microbit+bluetooth) en caso contrario, tienes que usar 2 microbits tal y como dice [aquí](https://libros.catedu.es/books/microbit-car/page/sin-bluetooth-y-2-microbit)
Para llevar un programa a la micro:bit hace falta **conexión por cable USB**. Ahora va a cargar el programa que le facilitará a CreateAI los datos
Al **conectar (por cable USB)** nos pide elegir la micro:bit y seguimos los pasos
[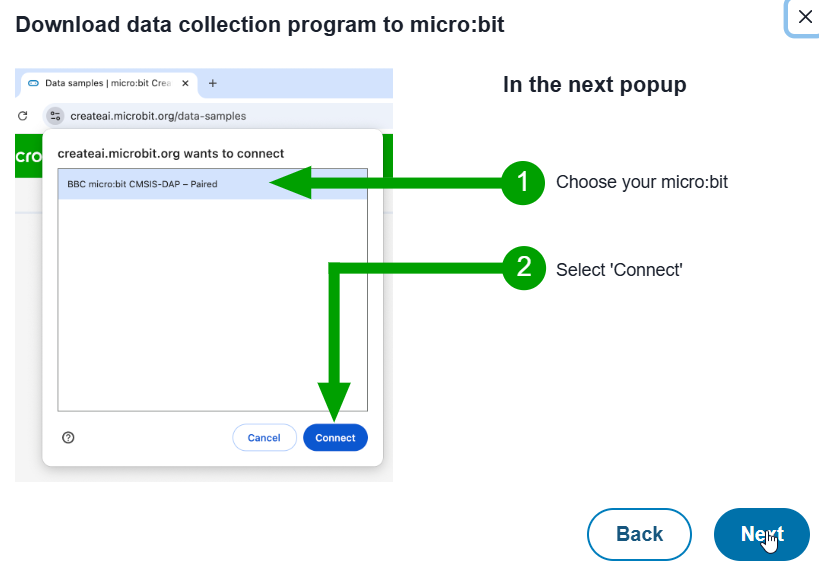](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-13-16-36-46-greenshot.png)
Se cargará en la micro:bit el programa que permitirá transferir los datos el acelerómetro a la interfaz web **CreateAI**
[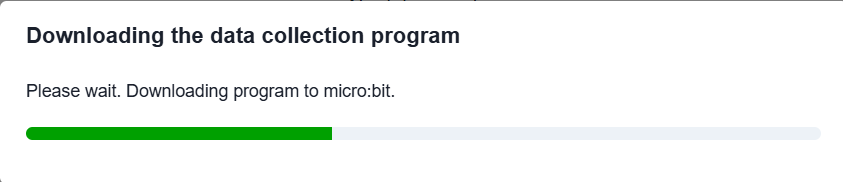](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-13-16-37-34-greenshot.png)
**OJO, ESTE NO ES NUESTRO PROGRAMA FINAL**, (paso **Code**) este no es el programa que nosotros editamos lo que queremos. Es un programa predeterminado, no editable, que sirve sólo para que CreateAI capte los movimientos del acelerómetro y así la máquina ML aprende con IA las acciones.
##### **Preparado para que CreateAI lea datos del acelerómetro de la Micro:bit**
Le ponemos una alimentación externa. Podemos usar pilas, batería de dron o powerbank :
[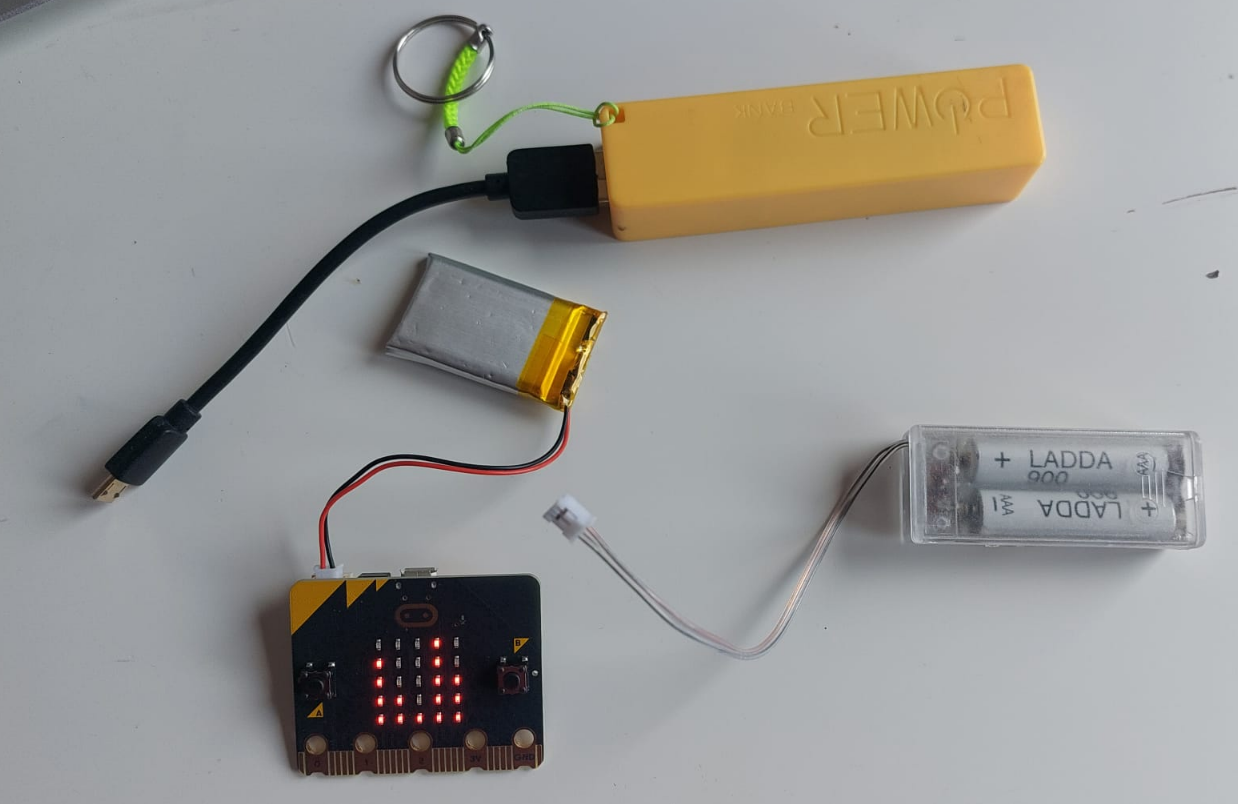](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-13-17-01-16-whatsapp.png)
Nos pide reproducir el patrón de la pantalla (esto se debe para asegurarse que sólo se comunica con ese micro:bit, por si hay otros micro:bits por el aula) lo normal es que coincida, por lo tanto no hay que hacer nada, en caso contrario con el ratón hay que reproducir el patrón que refleja la micro:bit
[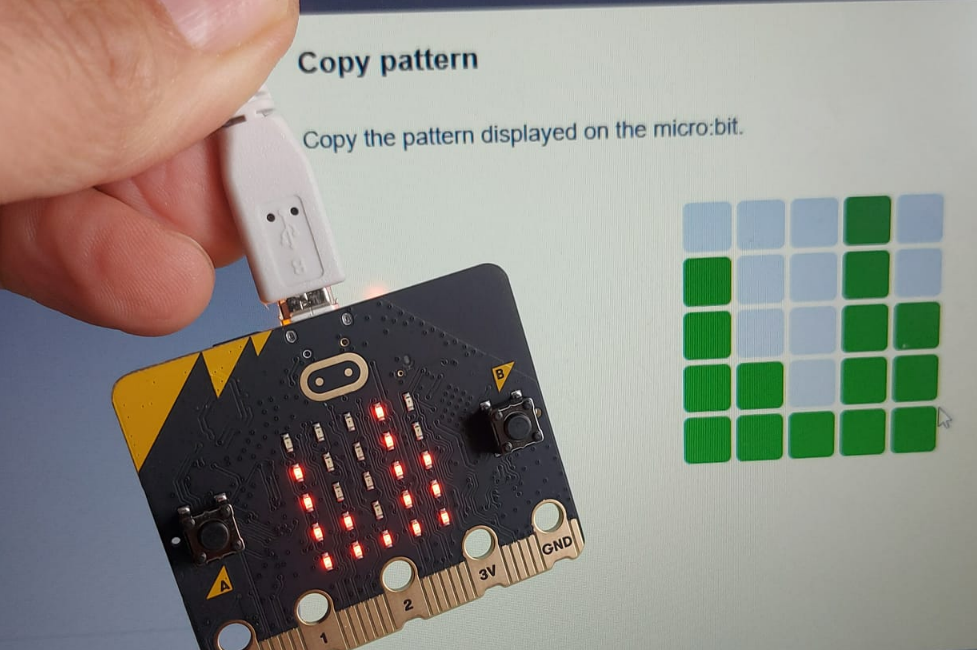](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-13-16-53-54-whatsapp.png)
Luego nos pide conectarlo **vía Bluetooth**:
Para recopilar datos, la conexión **es por Bluetooth** lo que nos facilita libertad de movimientos
[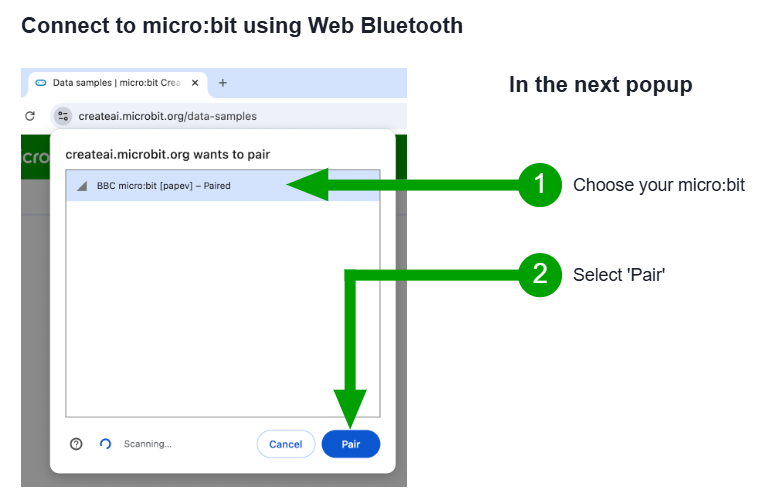](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-13-17-02-07-greenshot.png)
Y lo probamos en diferentes ejes
O sea, tenemos nuestra micro:bit conectado con CreateAI y preparada para registrar movimientos.
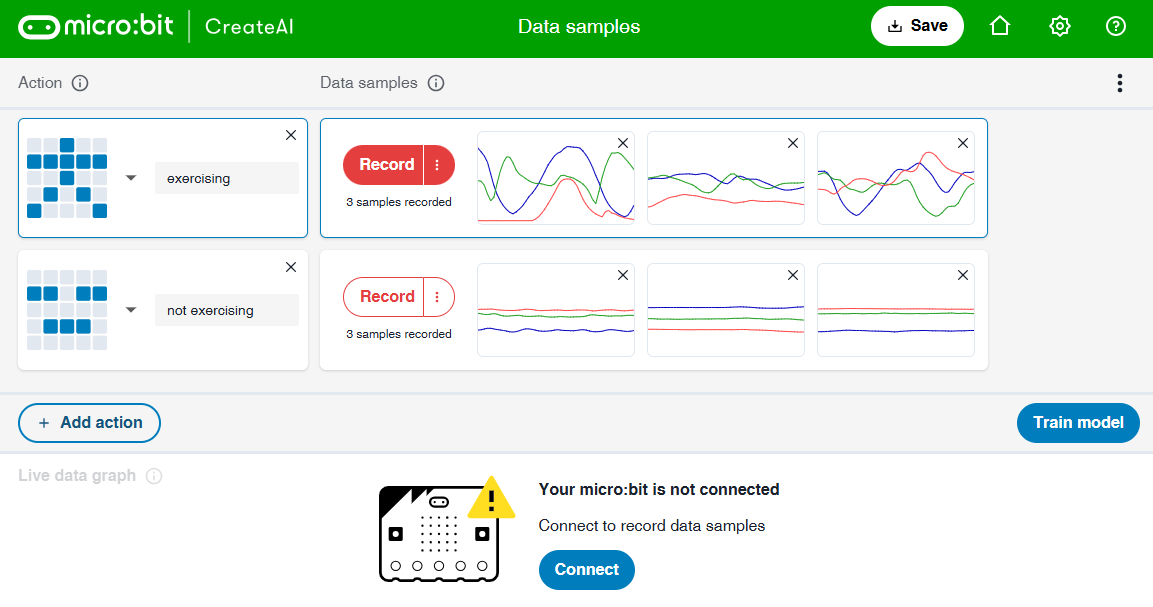
# Paso 2 Test model
##### **Grabando una acción**
Vamos a darle una **acción**, elegimos un icono, uno nombre y una acción, en este caso
- **Icono** un cuadrado pequeño
- **Nombre** circulos planoXY
- **Acción**: Vamos a registrar movimientos circulares en el plano horizontal
[](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-13-17-14-06-greenshot.png)
y lo grabamos **mínimo** tres veces :
Cuanto **más grabaciones** hagas, la máquina ML detectará mejor tus acciones. Mínimo son 3.
Y así con varias acciones, aquí hemos añadido uno de estar "**loco**" que es agitando en el eje Y y otro que es **quieto**
[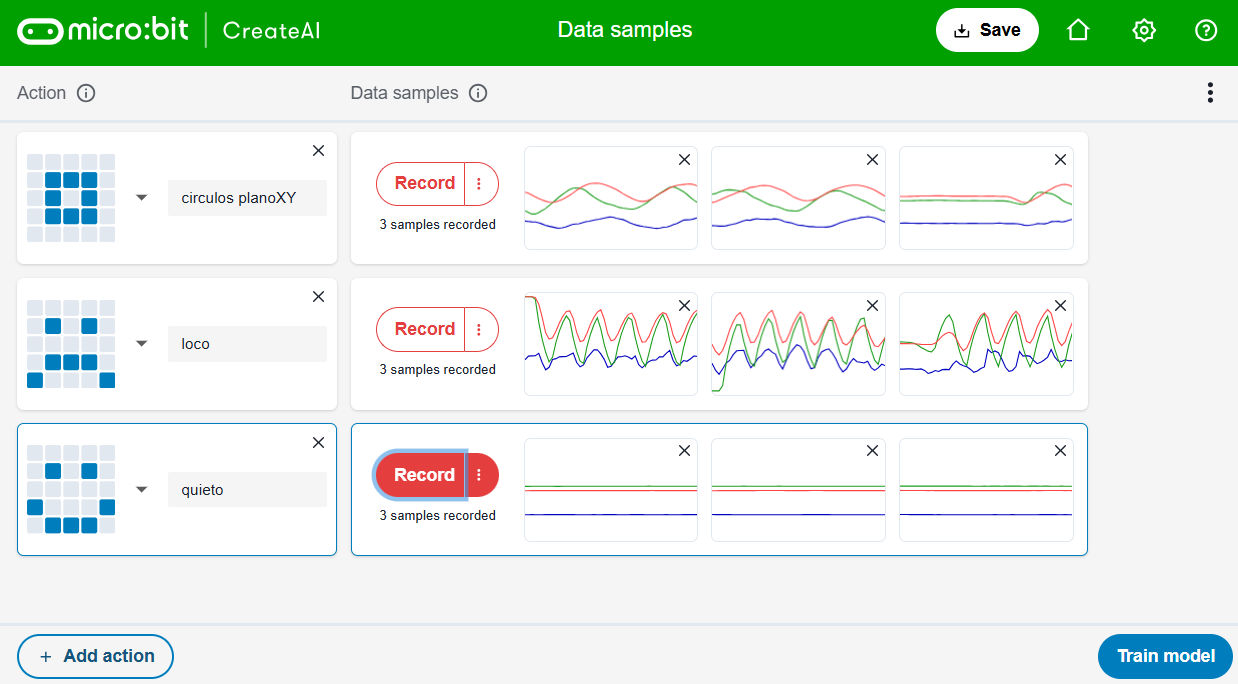](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-13-17-22-52-greenshot.png)
Pulsamos a **Train model**
En en este momento cuando se genera la inteligencia artificial **MACHINE LEARNING ML** etiquetado
Es muy rápido y enseguida pasa a la ventana donde podemos ir probando qué va detectando:
[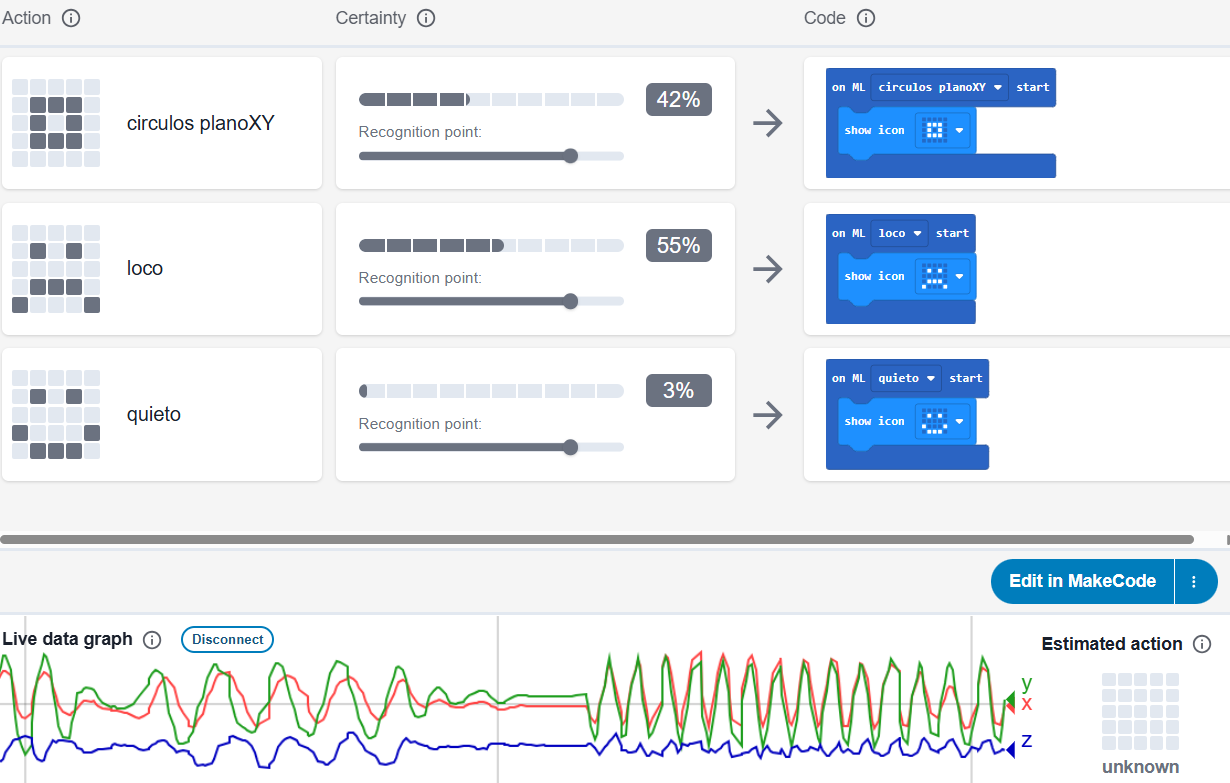](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-13-17-25-15-greenshot.png)
# Paso 3 Code
Una vez testeado nuestro modelo pulsamos a **Edit in MakeCode**
[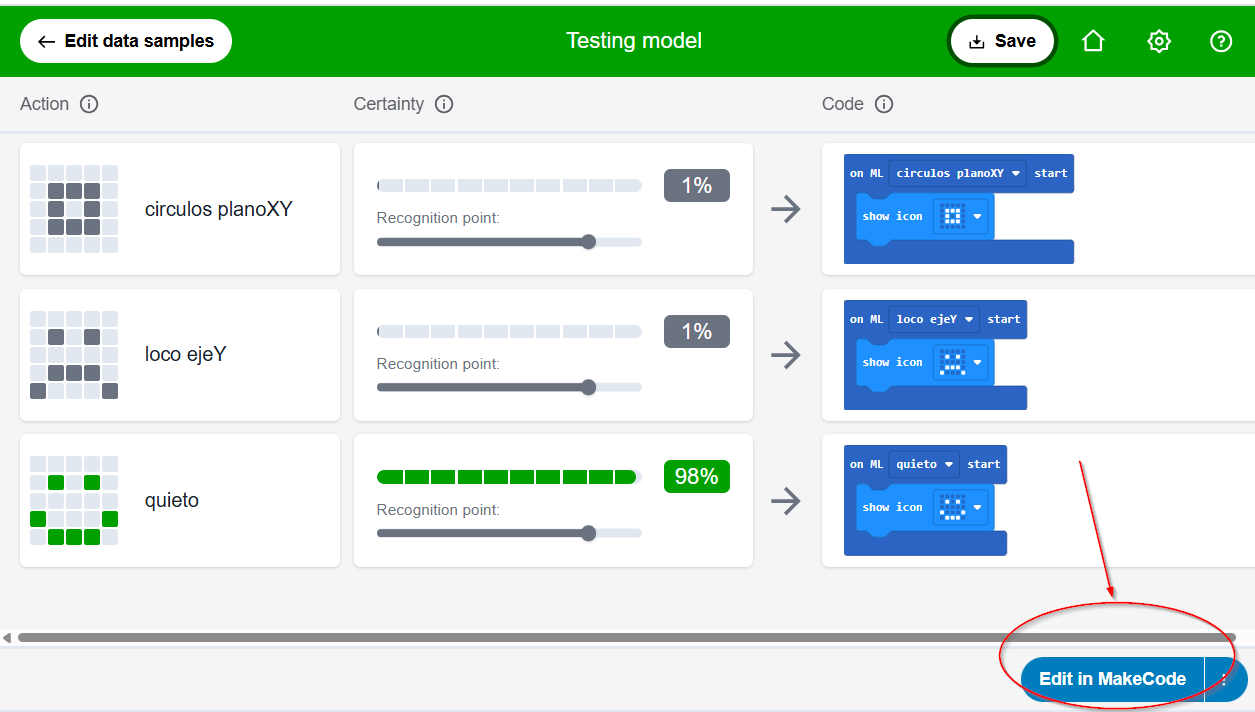](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-14-07-53-21-mattermost-desktop-app.png)
##### **AHORA ES NUESTRO MOMENTO DE PROGRAMAR**
Podemos poner lo que queramos, por ejemplo
1. hemos puesto una melodía en la acción **círculos planoXY**
2. un silbido si lo pongo **loco**
3. que silencia todo si esta **quieto**
[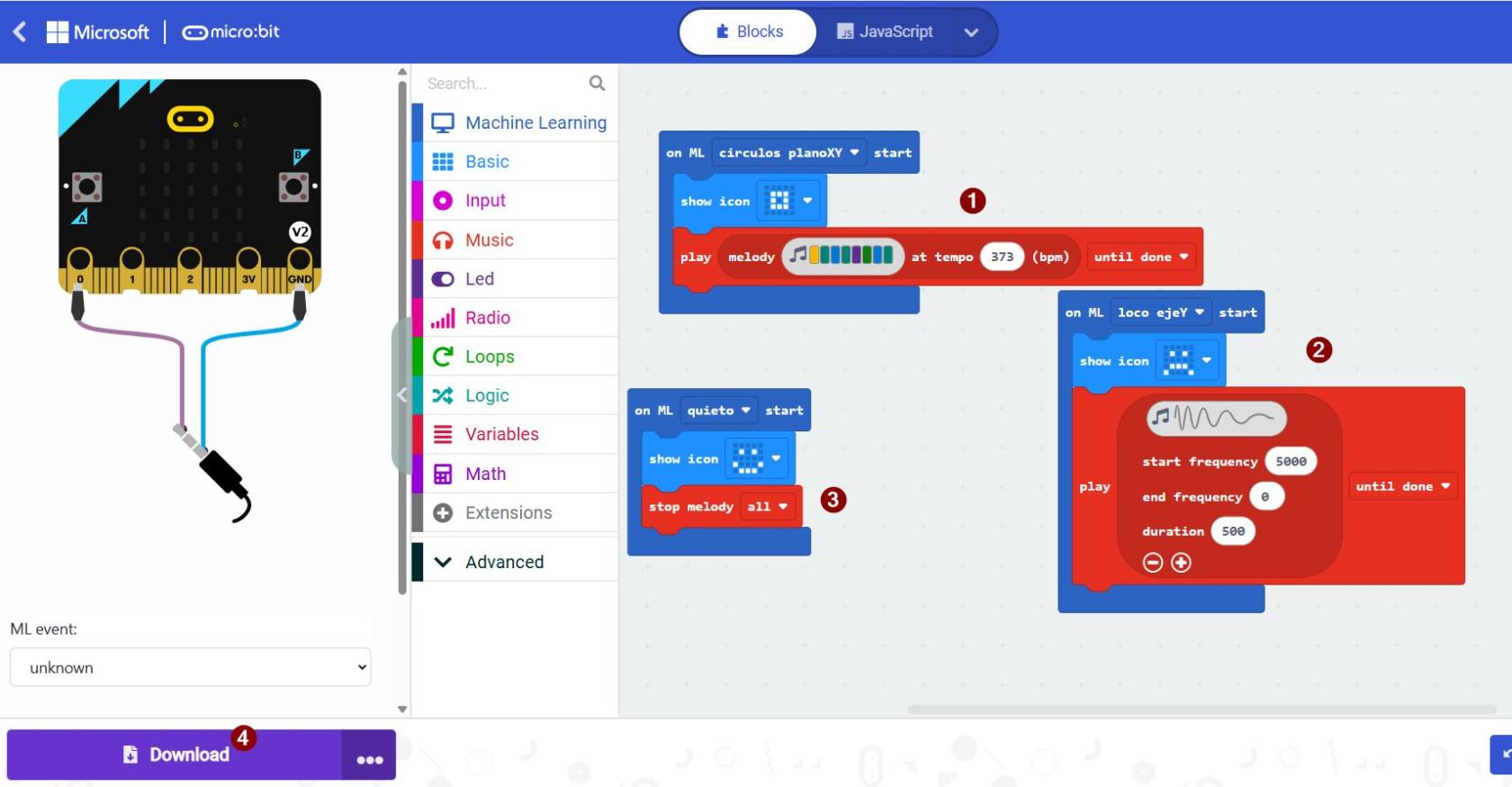](https://libros.catedu.es/uploads/images/gallery/2025-10/codecreateai.jpg)
Paso 4 descargarlo en la micro:bit y nos pide conectarlo con cable pues tiene que subir el programa
**PARA DESCARGAR UN PROGRAMA SIEMPRE ES POR CABLE USB**
[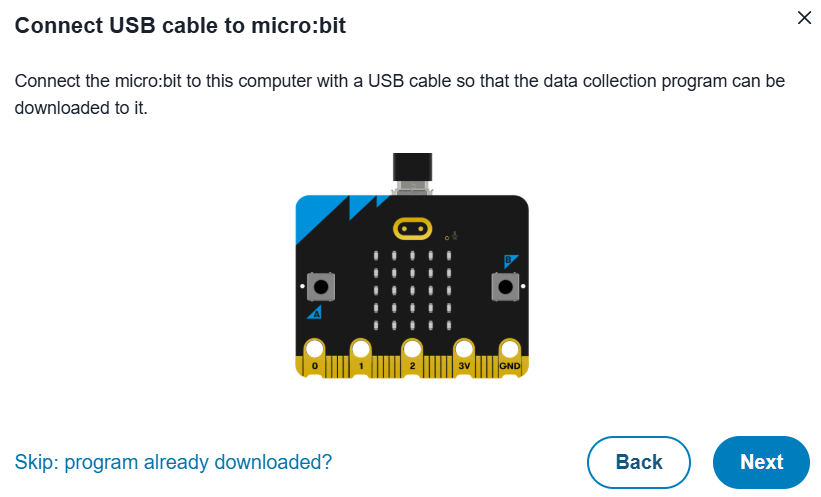](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-13-17-28-11-greenshot.png)
Una vez descargado ya puedes probar tu invento
Ten en cuenta que también se descarga en la micro:bit la máquina ML creada con IA
Por lo tanto **no** necesitas el ordenador conectado **ni** Internet para ejecutarlo **ni** esta conectado la micro:bit por Bluetooth al PC
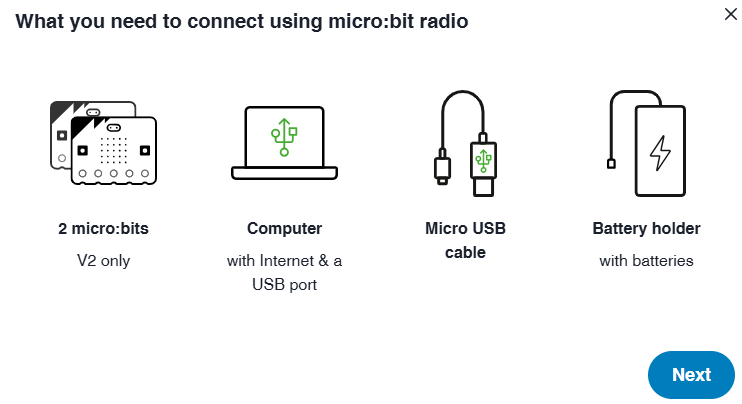
# Sin Bluetooth y 2 micro:bit
La idea es utilizar una micro:bit que haga de "puente inalámbrico" utilizando la conexión vía radio que tiene integrada la placa micro:bit
Notación:
- Micro:bit1 será la principal, la que estará conectado al "vestible" y tendrá nuestro programa
- Micro:bit2 será la conectada vía cable al PC y que micro:bit1 le pasa los datos para el paso 1 **collect data** y paso 2 **test**
- Micro:bit2 no será necesario en el paso 3 **code**.
[![2025-10-14 14_59_38-Microsoft PowerPoint - [Presentación1].png](https://libros.catedu.es/uploads/images/gallery/2025-10/scaled-1680-/2025-10-14-14-59-38-microsoft-powerpoint-presentacion1.png)](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-14-14-59-38-microsoft-powerpoint-presentacion1.png)
## **PASO 1 COLLECT DATA**
Supongamos que **no** tenemos Bluetooth pero **sí** dos micro:bits. En el proceso de **Collect data** le damos a **Connect**
[](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-14-14-16-59-greenshot.png)
Ya detecta que no tenemos Bluetooth por lo tanto nos invita a utilizar 2 micro:bits
[](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-14-14-17-53-greenshot.png)
##### **MICRO:BIT1 LA QUE VA A ESTAR "MOVIENDOSE"**
Conectamos micro:bit1 con cable
[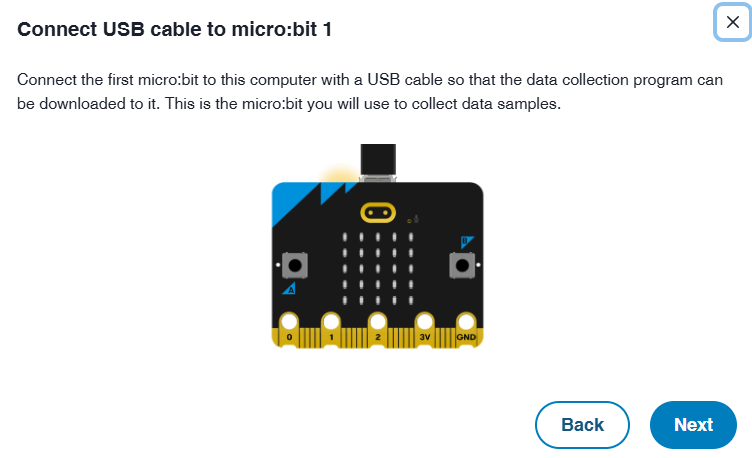](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-14-14-18-36.png)
[](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-14-14-23-10.png)
Le descarga el programa de recoger los datos
[](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-14-14-19-13-configuracion.png)
Desconectamos del cable y le ponemos la batería :
[](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-14-14-24-50-whatsapp.png)
##### **MICRO:BIT2 LA QUE VA A ESTAR QUIETA**
Lo conectamos al pc con cable USB
[](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-14-14-26-07-whatsapp.png)
Y le descargamos el programa de transferencia por radio
[](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-14-14-27-33-documento1-microsoft-word.png)
##### **A recoger los datos**
Ya están los dos vinculados:
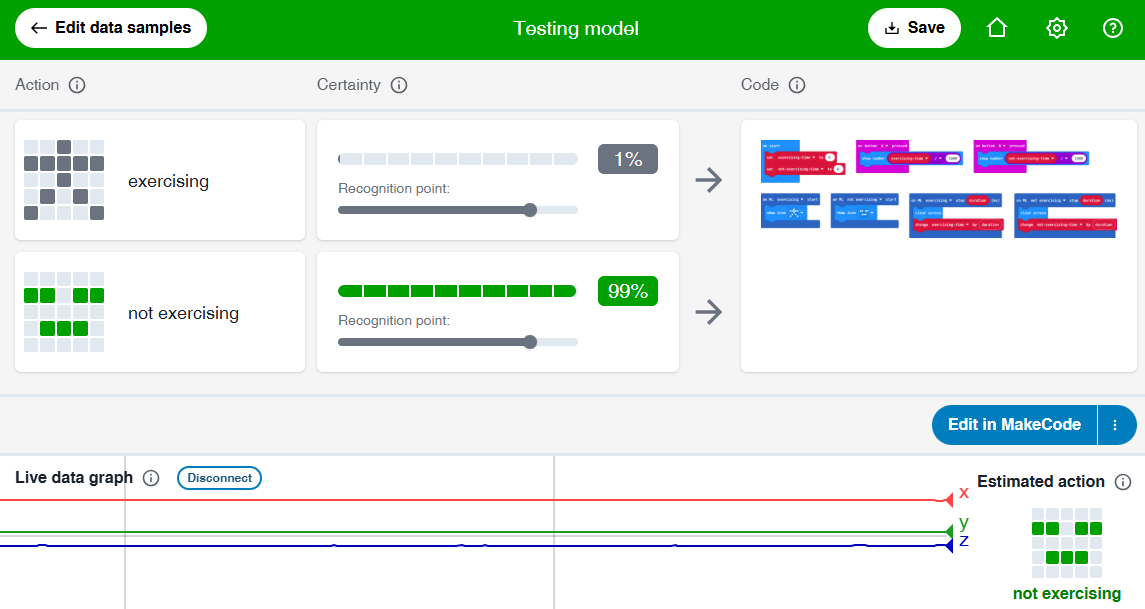
## **PASO 2 TEST MODEL**
No hay que hacer nada :
- El micro:bit2 sigue conectado al PC por cable USB le transfiere los datos a CreateAI
- El micro:bit1 con batería conectado inalámbricamente al micro:bit2 tiene libertad de movimientos
## **PASO 3 CODE**
Pulsamos a Edit in MakeCode:
[](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-14-14-40-05.png)
Modificamos lo que queramos
[](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-14-14-42-16.png)
**PERO ATENCIÓN AQUÍ EN DOWNLOAD TIENES QUE CONECTAR POR CABLE LA MICRO:BIT1 ¡¡NO LA 2!!!**
Es decir, el micro:bit1 que se mueve, pues es el que tiene que ejecutar el programa. El micro:bit2 sólo nos ha servido como puente para recoger los datos
[](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-14-14-44-47-whatsapp.png)
# Entendiendo a mi peluche
Vamos a a reconocer diferentes gestos de un muñeco peluche. Extraído de [https://microbit.org/projects/make-it-code-it/ai-storytelling-friend/](https://microbit.org/projects/make-it-code-it/ai-storytelling-friend/)
Procedemos a reconocer tres acciones:
- Saltando
- Volteretas
- Durmiendo
En este [enlace directamente saltas al paso Collect Data](https://createai.microbit.org/import?id=ai-storytelling-friend&project=Project%3A%20AI%20storytelling%20friend&name=AI%20storytelling%20friend&editors=makecode)
Paso **Collect Data** :
1. Podemos borrar sus datos y así lo personalizamos a los de nuestra mascota
2. Grabamos las acciones
3. Le damos pues a **Train Model** para crear la máquina ML
[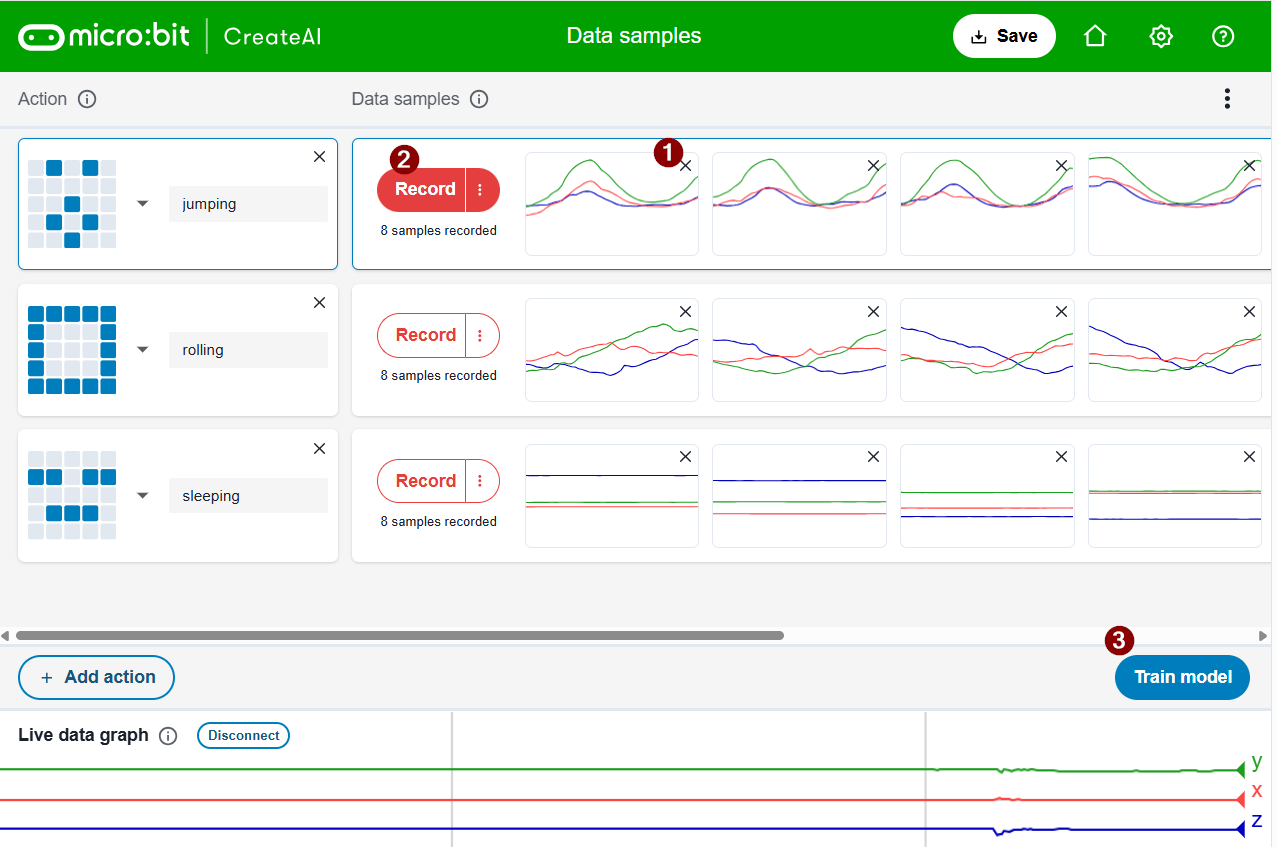](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-14-12-59-40-whatsapp.png)
**Test model** lo testeamos si realmente funciona y la damos a **Edit in MakeCode,** si no funciona bien pues atrás a Edit data samples
**[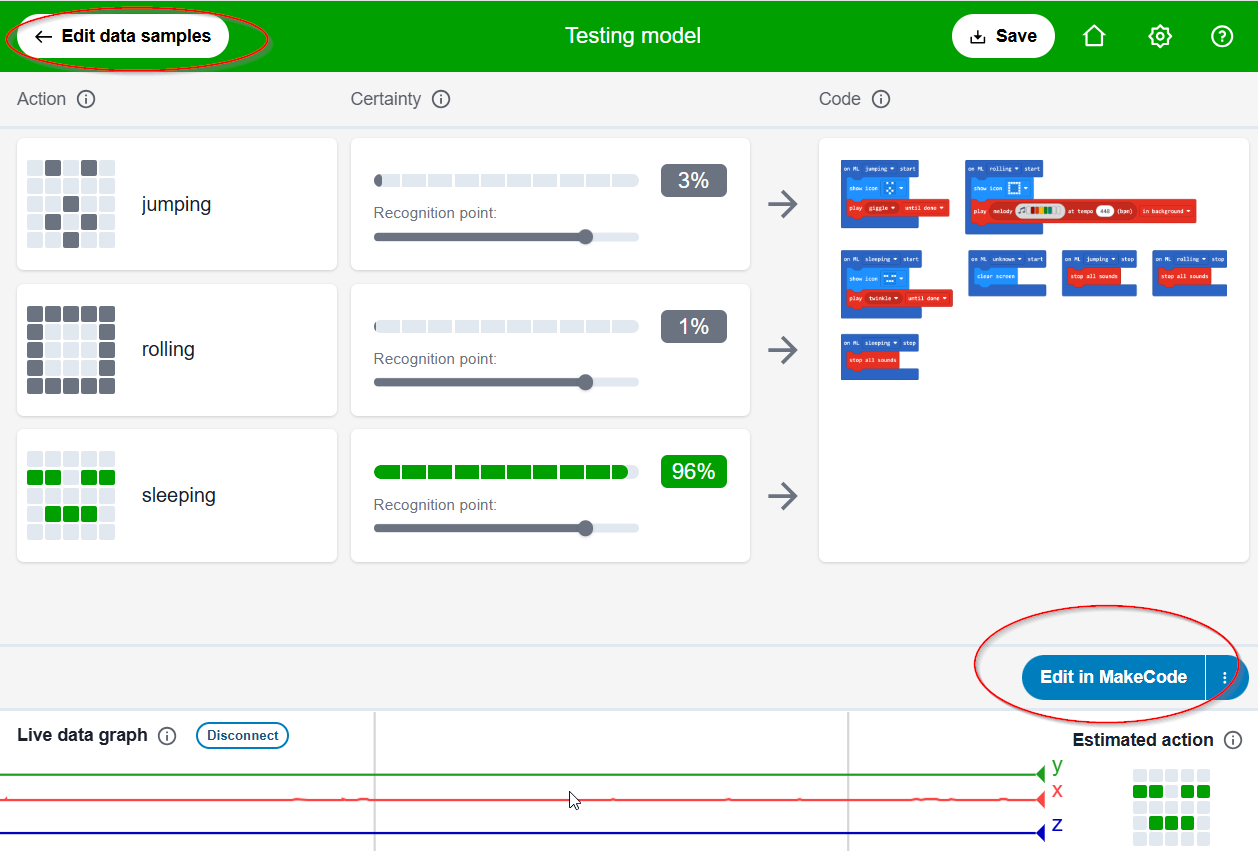](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-14-13-14-28-mattermost-desktop-app.png)**
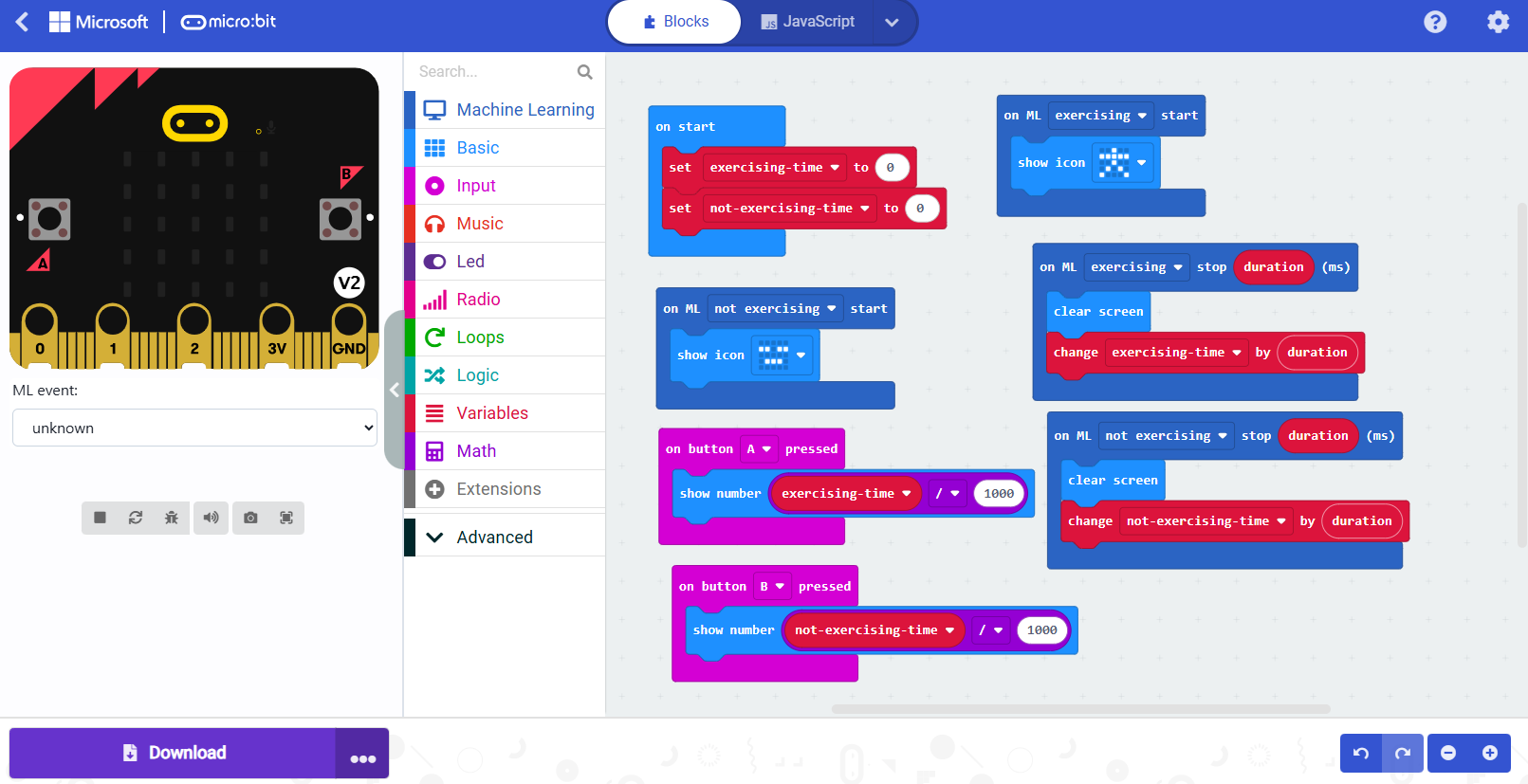
En el paso **Code** podemos hacer lo que queramos, él nos enseña un programa por defecto, se puede modificar como se desee
[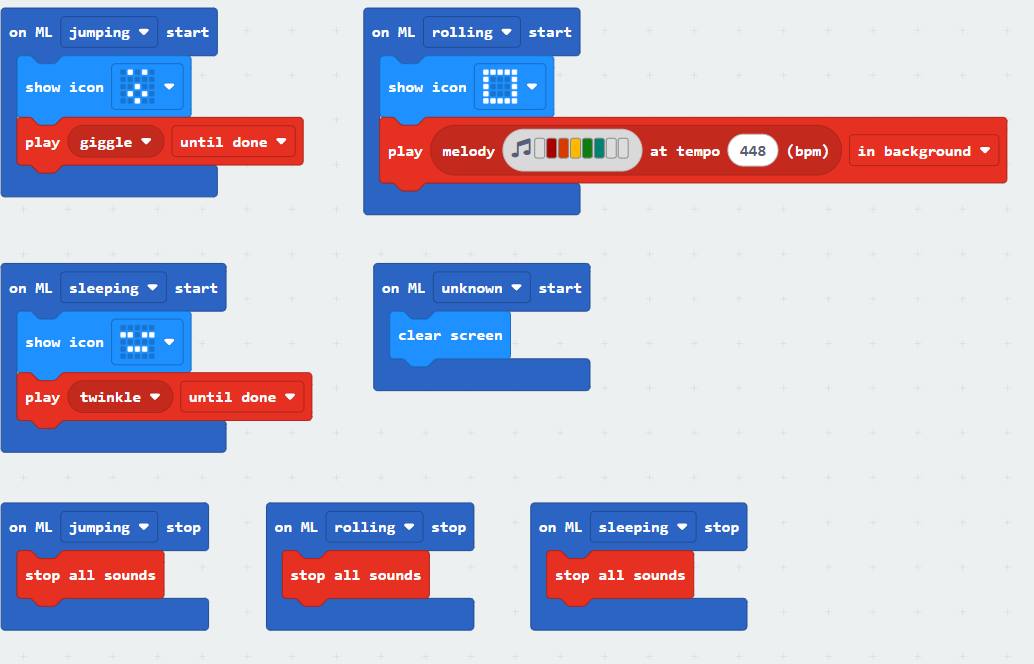](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-14-13-45-48-whatsapp.png)
El resultado es:
# Más proyectos CreateAI
Con el mismo principio de detectar con la AI movimientos con el acelerómetro, se pueden hacer diversos proyectos :
##### **Contador de tiempo de ejercicio**
[https://microbit.org/projects/make-it-code-it/simple-ai-exercise-timer/](https://microbit.org/projects/make-it-code-it/simple-ai-exercise-timer/)
##### **Contador de ejercicio**
[https://microbit.org/projects/make-it-code-it/ai-activity-timer/](https://microbit.org/projects/make-it-code-it/ai-activity-timer/)
##### **Y mucho más ....**
[https://microbit.org/ai/](https://microbit.org/ai/)
[](https://libros.catedu.es/uploads/images/gallery/2025-10/2025-10-14-14-14-14-greenshot.png)
# cars para microbit
## **Cutebot**
- Muy compacto y muy bien conseguido (⁓56€ placa microbit incluida 2023)
- Versión avanzada[ Cutebot plus](https://robotopia.es/kits-educativos/214-25-cutebot-plus.html)
- [Manual English](https://www.elecfreaks.com/learn-en/microbitKit/smart_cutebot/index.html)
**[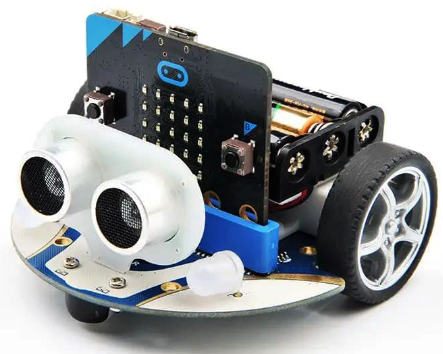](https://libros.catedu.es/uploads/images/gallery/2023-09/cutebot.png)****Características**
- Sensor de ultrasonidos de distancia SR04
- Sigue-líneas
- Sensor de IR para usar con mando a distancia (incluido)
- Zumbador
- 2 x LEDs RGB
- 2 x LED Neopixel (debajo del chasis)
- 2 x Motores de 300 RPM de potencia variable
- Conexión I2C para extensiones
- En caja de cartón
## **Maqueen**
- Muy compacto y muy bien conseguido (⁓70€ placa microbit incluida 2023)
- Versión avanzada [Maqueen plus](https://tienda.bricogeek.com/robots/1549-robot-maqueen-plus-para-microbit.html?vt_campaign=1022310&vt_product=1549&vt_content=10024707&vt_alg=UpSell)
- [Manual](https://wiki.dfrobot.com/micro_Maqueen_for_micro_bit_SKU_ROB0148-EN) (English)
**[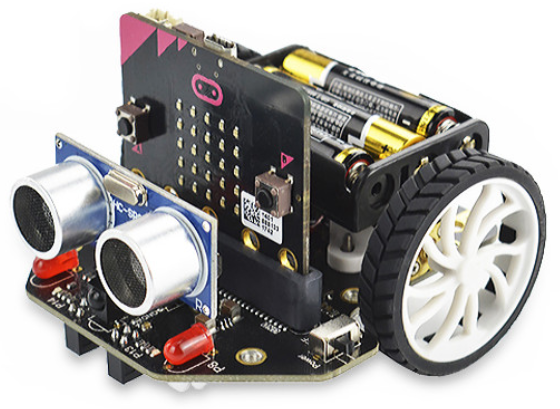](https://libros.catedu.es/uploads/images/gallery/2023-09/maqueen.png)****Características**
- Sensor de ultrasonidos de distancia SR04
- Sigue-líneas
- Sensores de IR para usar con mando a distancia (incluido)
- 2 x sensores IR
- Zumbador
- 4 x LEDs RGB
- 2 x LED Neopixel (debajo del chasis)
- 2 x Motores de 133 RPM de potencia variable
- Conexión I2C para extensiones
- Borde de conectores para entradas y salidas
- En caja de plástico
#### **INSTRUCCIONES EN MAKECODE**Hay diferencias de variedad de instrucciones en [https://makecode.microbit.org/#editor](https://makecode.microbit.org/#editor) en cada extensión[](https://libros.catedu.es/uploads/images/gallery/2023-09/instruccionescute.jpg)[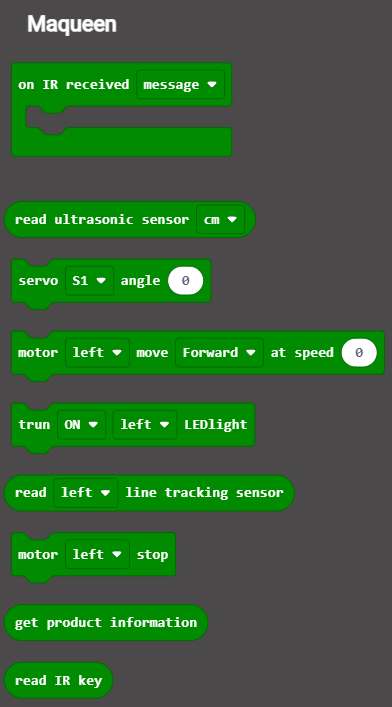](https://libros.catedu.es/uploads/images/gallery/2023-09/instruccionesmaqueen.jpg)[](https://libros.catedu.es/uploads/images/gallery/2023-09/memecutemcqueen.png)
# Cutebot
# Montaje del kit
a primera vez que se usa el kit viene sin montar, el ensamblaje es muy sencillo, mira este vídeo sobre todo a partir del minuto 2:00
[](https://libros.catedu.es/uploads/images/gallery/2024-07/2024-07-04-12-53-44-whatsapp.png)
[ Cutebot - Modelo educativo ](https://sketchfab.com/3d-models/cutebot-modelo-educativo-3e82875b2b96416dbf9f7ea390524042?utm_medium=embed&utm_campaign=share-popup&utm_content=3e82875b2b96416dbf9f7ea390524042) by [ GmedranoTIC ](https://sketchfab.com/gmedranotic?utm_medium=embed&utm_campaign=share-popup&utm_content=3e82875b2b96416dbf9f7ea390524042) on [Sketchfab](https://sketchfab.com?utm_medium=embed&utm_campaign=share-popup&utm_content=3e82875b2b96416dbf9f7ea390524042)
# Prácticas con Cutebot
##### **EVITA OBSTÁCULOS**Un evita obstáculos muy muy sencillo podría ser este:
Las dos prácticas del vídeo se pueden descargar en [https://github.com/GmedranoTIC/Microbit](https://github.com/GmedranoTIC/Microbit), directamente seleccionando el archivo y pinchando con el botón derecho, «guardar enlace como»
¿Puedes mejorarlo? por ejemplo si encuentra un obstáculo que retroceda un poco y luego que gire
##### **SIGUE LÍNEAS**
Este programa que se propone es el siguiente :
Es
# Más prácticas con Cutebot
En la wiki de la empresa de Cutebot: Elecfreaks [https://elecfreaks.com/learn-en/microbitKit/smart\_cutebot/index.html](https://elecfreaks.com/learn-en/microbitKit/smart_cutebot/index.html) encontrarás 14 prácticas muy interesantes, que no podemos reproducir en este libro por tener los derechos reservados :
1. **[ Case 01: Move Forward or Reverse at the Full Speed](https://elecfreaks.com/learn-en/microbitKit/smart_cutebot/cutebot_case01.html)**
1. Una práctica sencilla que según el botón que aprietas en en microbit ejecuta una velocidad u otra
2. **[Case 02: Speed Up Gradually](https://elecfreaks.com/learn-en/microbitKit/smart_cutebot/cutebot_case02.html)**
1. El cutebot va ganando velocidad
3. **[Case 03: Dance in Figure-of-eight](https://elecfreaks.com/learn-en/microbitKit/smart_cutebot/cutebot_case03.html)**
1. El cutebot hace el recorrido de un 8
4. [**Case 04: Run at Rando**m](https://elecfreaks.com/learn-en/microbitKit/smart_cutebot/cutebot_case04.html)
1. El cutebot danza de forma aleatoria
5. **[Case 05: Automatic Headlights](https://elecfreaks.com/learn-en/microbitKit/smart_cutebot/cutebot_case05.html)**.
1. Si es de noche, se encienden las luces
6. **[Case 06: Steering&Clearance Lamps](https://elecfreaks.com/learn-en/microbitKit/smart_cutebot/cutebot_case06.html)**.
1. Según los botones, las lámparas flashean 5 veces
7. [**Case 07: Fall-arrest Cutebot**.](https://elecfreaks.com/learn-en/microbitKit/smart_cutebot/cutebot_case07.html)
1. En la wiki pone que el propósito es que cuando detecta el borde de la mesa, vuelve atrás y gira. **ATENCIÓN** no aconsejable hacerlo en una mesa, por el peligro de caída, se recomienda hacer una figura cerrada con cinta negra y el cutebot no saldrá del recinto.
8. [ **Case 08: Run Along the Black Line**.](https://elecfreaks.com/learn-en/microbitKit/smart_cutebot/cutebot_case08.html)
1. El típico siguelíneas
9. [**Case 09: Autonomous Obstacle Avoidance**](https://elecfreaks.com/learn-en/microbitKit/smart_cutebot/cutebot_case09.html).
1. El típico salva-obstáculos
10. **[Case 10: Car Following with A Fixed Distance](https://elecfreaks.com/learn-en/microbitKit/smart_cutebot/cutebot_case10.html)**.
1. Cutebot se mueve siguiendo tu mano, manteniendo una distancia fija.
11. **[Case 11: micro:bit Remote Control](https://elecfreaks.com/learn-en/microbitKit/smart_cutebot/cutebot_case11.html)**.
1. coche teledirigido con otro microbit y los botones
12. **[Case 12: Remote Control the Cutebot with micro:bit Accelerometer](https://elecfreaks.com/learn-en/microbitKit/smart_cutebot/cutebot_case12.html)**.
1. el mismo ejemplo pero usando el acelerómetro (inclinación) en vez de los botones
13. (omitimos este ejemplo pues requiere un joystick no proporcionado en el kit)
14. **[ Case 14: IR Remote Control Car](https://elecfreaks.com/learn-en/microbitKit/smart_cutebot/cutebot_case14.html)**.
1. 1. coche teledirigido pero con el mando IR
15. [**Case15: Seeking the Light**](https://elecfreaks.com/learn-en/microbitKit/smart_cutebot/cutebot_case15.html).
1. Cutebot sigue la luz
Hay más retos pero con accesorios que no se proporciona en el kit básico
[Versión pdf](https://docs.rs-online.com/089a/A700000007852744.pdf)
[](https://libros.catedu.es/uploads/images/gallery/2023-09/wikicutebot.jpg)
# AI Lens Elecfreak
Existe en Aularagón un curso completo para manejar la AI LENS Elecfreack con Cutebot
Ver la web en [https://libros.catedu.es/books/cutebotai-lens](https://libros.catedu.es/books/cutebotai-lens)
Para maqueen hay que utilizar otro tipo de soporte, ver [https://libros.catedu.es/books/cutebotai-lens/page/soporte](https://libros.catedu.es/books/cutebotai-lens)
[](https://libros.catedu.es/uploads/images/gallery/2024-11/cutebotailens.jpg)
# Maqueen
# Montaje del kit
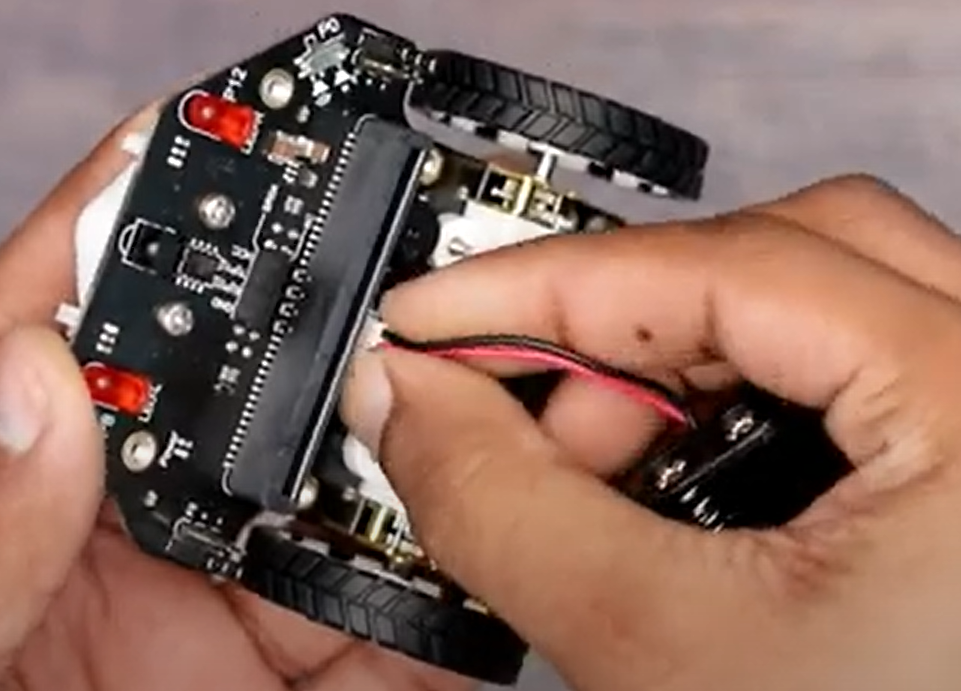
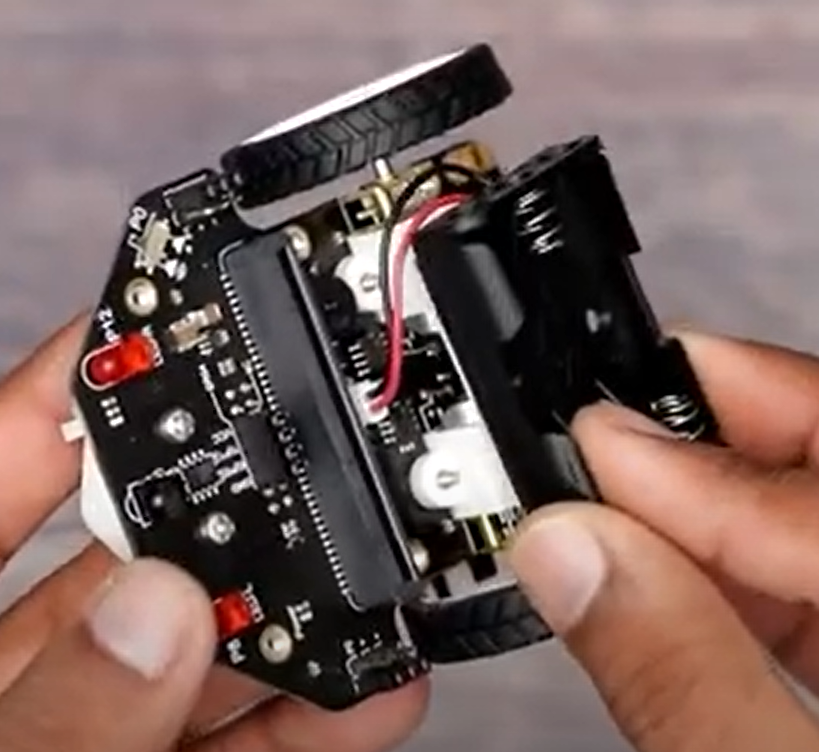
La primera vez que se usa el kit viene sin montar, el ensamblaje es muy sencillo, mira este vídeo solo los primeros 30 segundos.
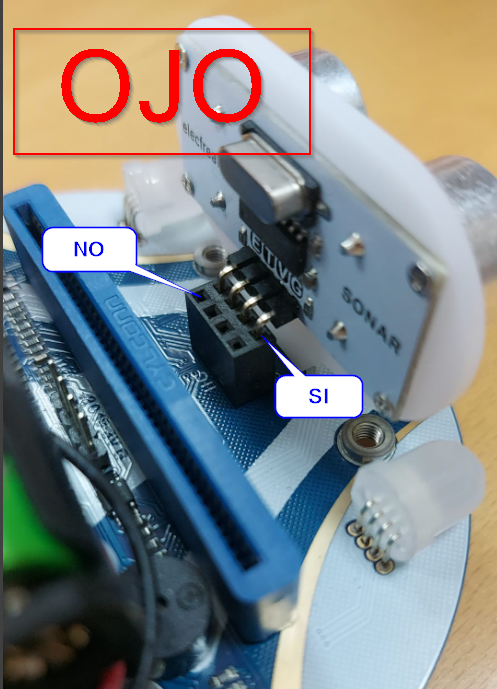
La parte más importante que no hay que saltar es la conexión de las baterías con la placa **antes de poner el soporte de baterías encima de los motores**, pues una vez puesto, es difícil llegar al conector:
Primero esto
[](https://libros.catedu.es/uploads/images/gallery/2023-09/conexion-pilas-maqueen.png)
Y luego esto
[](https://libros.catedu.es/uploads/images/gallery/2023-09/conexion-pilas-maqueen2.png)
# Primeros pasos
Mira este ve vídeo para que veas:
- Características de Maqueen minuto 0:00 a 3:48
- Como programar Maqueen minuto 3:48
- Aplicación propia de Dfrobot (sólo para windows)
- Incluir la extensión Maqueen en Makecode de microbit [https://makecode.microbit.org/](https://makecode.microbit.org/)
Resumiendo para programar la maqueen con makecode:
1.- Ir a la página web del editor de Makecode [https://makecode.microbit.org/#editor](https://makecode.microbit.org/#editor)
2.- En Extensiones buscar la extensión Maquecode
[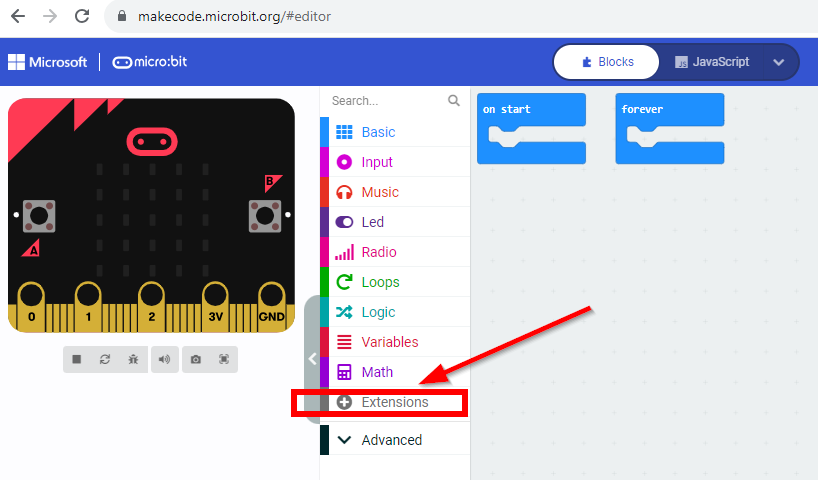](https://libros.catedu.es/uploads/images/gallery/2023-09/makecode-maqueen1.png)
[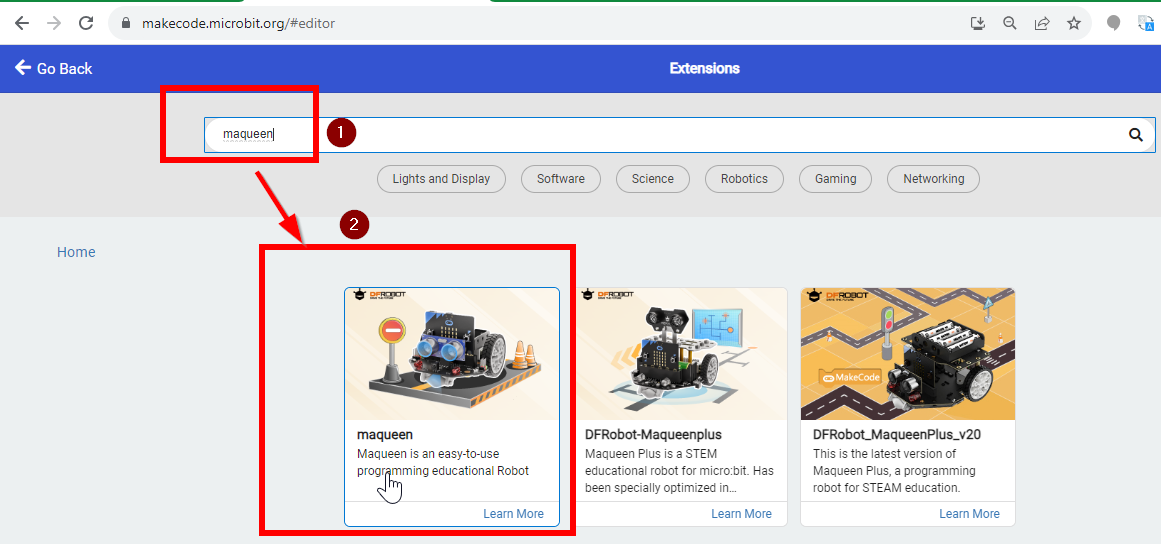](https://libros.catedu.es/uploads/images/gallery/2023-09/makecode-maqueen2.png)
3.- Ya tenemos las herramientas necesarias para manejar MAQUEEN y también otra sección IR para el mando infrarrojos
[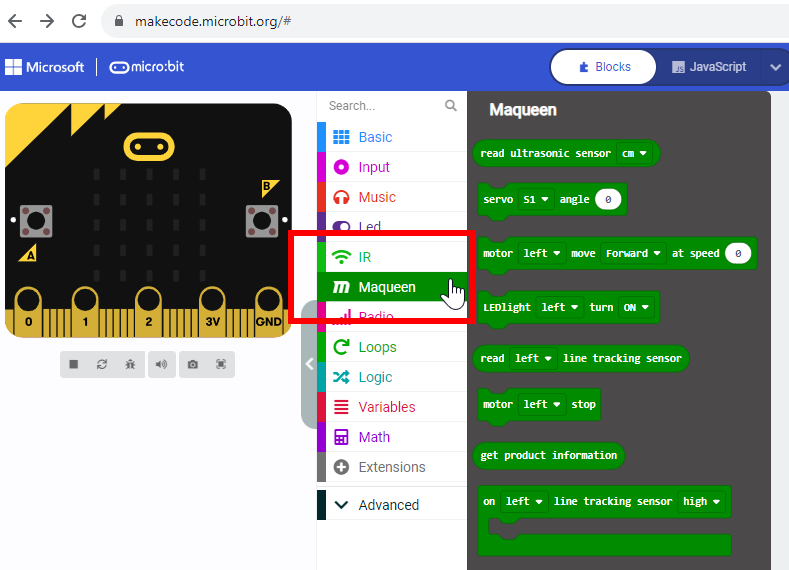](https://libros.catedu.es/uploads/images/gallery/2023-09/makecode-maqueen3.png)
# Introducción
Agradecimientos al autor[ Pedro Ruiz ](https://twitter.com/pedroruizf)por la publicación de estos retos en [https://pedroruizf.github.io/maqueen\_retos/index.html](https://pedroruizf.github.io/maqueen_retos/index.html) licencia [Licencia Creative Commons Reconocimiento Compartir igual 4.0](http://creativecommons.org/licenses/by-sa/4.0/)
Este sitio plantea una serie de retos basados en los que se muestran en la [wiki de dfrobot sobre el robot maqueen](https://wiki.dfrobot.com/micro_Maqueen_for_micro_bit_SKU_ROB0148-EN), y otros de cosecha propia del autor.
Los retos pueden descargarse en formato zip en [este enlace](https://pedroruizf.github.io/maqueen_retos/codigo_retos.zip)
[](https://libros.catedu.es/uploads/images/gallery/2023-09/maqueen.jpg)
Otros posibles retos con maqueen podrían ser:
- Persigue-objetos.
- Control remoto de maqueen con otra micro:bit.
- Control de servos en maqueen aprovechando pines de extensión.
- etc.
# Control de Motores
Se trata que el robot haga la siguiente secuencia de movimiento de forma indefinida:
- Adelante durante 1 segundo.
- Derecha durante 1 segundo.
- Izquierda durante 1 segundo.
- Atrás durante 1 segundo.
[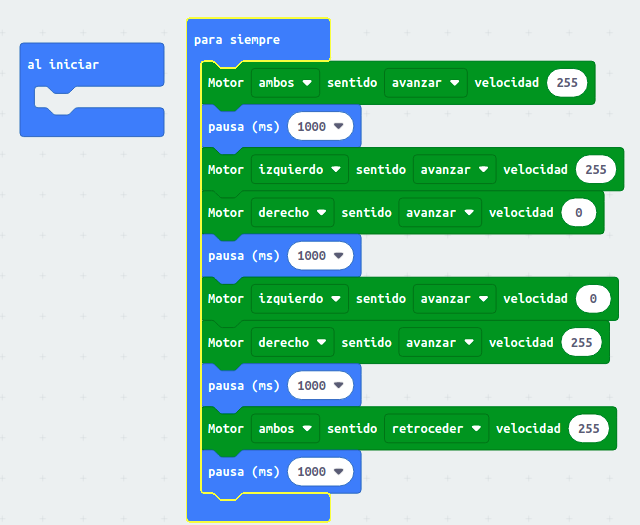](https://libros.catedu.es/uploads/images/gallery/2023-09/reto-01.png)
# Neopixel
El robot maqueen posee cuatro Leds RGB (Red, Green, Blue) en su parte inferior, en realidad son tres leds de colores encapsulados. En ellos puedo realizar una adición de colores luz indicando la intensidad de los tres colores luz para formar el color deseado.
Existen webs para componer colores muy útiles para conseguir colores RGB concretos: [https://htmlcolorcodes.com/es/](https://htmlcolorcodes.com/es/)
RETO
Se trata de conseguir que el robot maqueen represente en sus leds RGB colores aleatorios, cambiando el mismo cada segundo.
[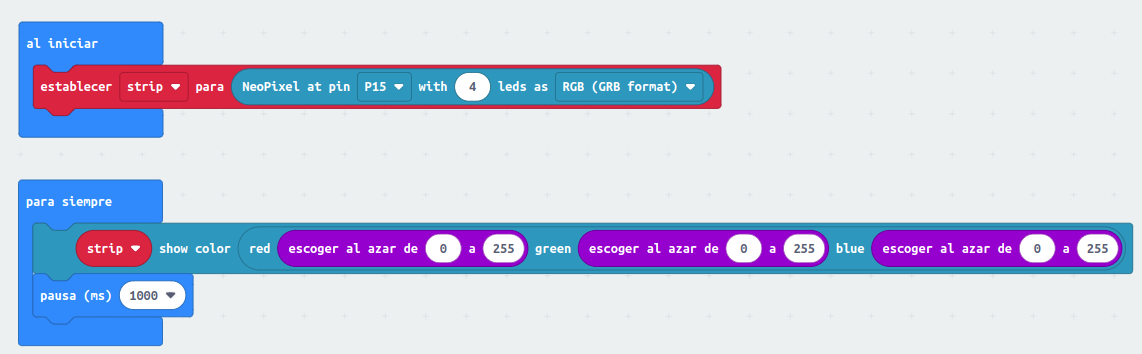](https://libros.catedu.es/uploads/images/gallery/2023-09/reto-02a.png)
RETO
Se trata de hacer gradación de colores con los LEDs RGB Neopixel que tiene nuestro robot.
[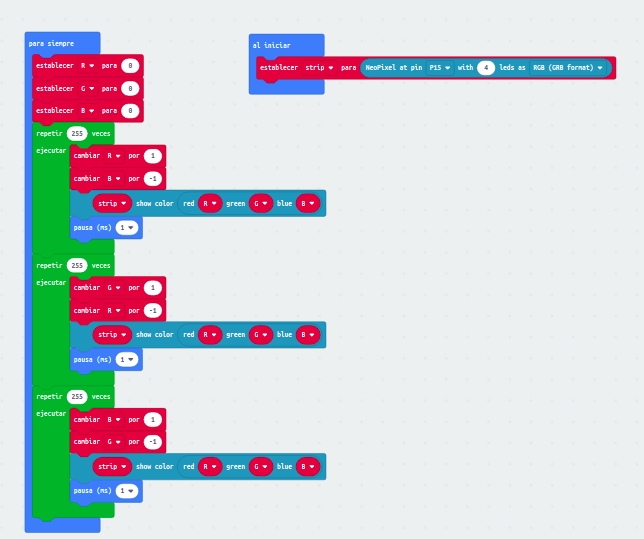](https://libros.catedu.es/uploads/images/gallery/2023-09/reto-02.png)
# leds frontales
Este reto consiste en hacer una intermitencia con los dos leds rojos frontales del robot. El tiempo de encendido de cada led es de medio segundo.
[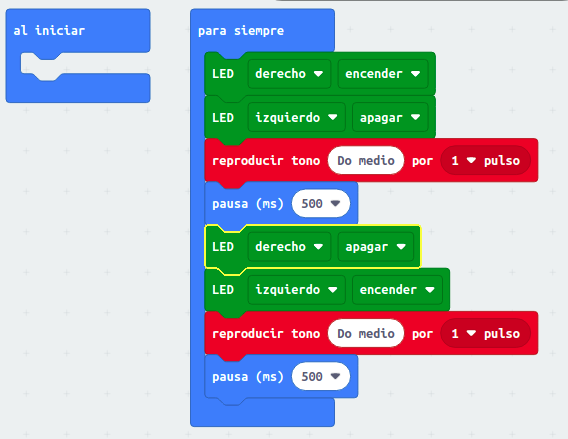](https://libros.catedu.es/uploads/images/gallery/2023-09/reto-03.png)
# Distancia con US
Este reto consiste en mostrar la distancia a la que están los obstáculos en los leds de micro:bit (matriz de 25 leds).
[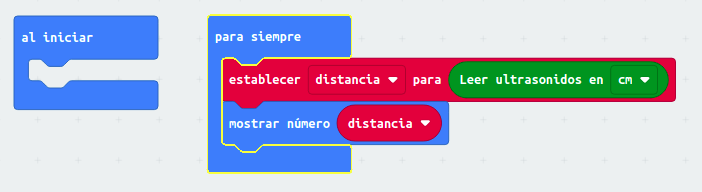](https://libros.catedu.es/uploads/images/gallery/2023-09/reto-04.png)
# Reconocimiento de teclas mando IR
Esta tarea consiste en determinar el valor numérico que tienen las teclas de un mando a distancia cualquiera.
[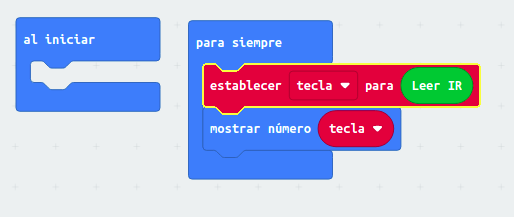](https://libros.catedu.es/uploads/images/gallery/2023-09/reto-05.png)
# maqueen teledirigido con mando IR
Este reto consiste en asignar a cuatro teclas de una mando a distancia por infrarrojos (IR), los cuatro movimientos básicos del robot. Cuando se pulsen provocarán respectivamente movimientos como: adelante, atrás, izquierda y derecha por un tiempo.
[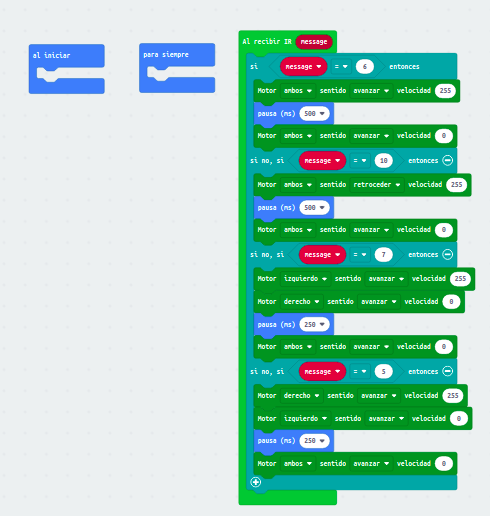](https://libros.catedu.es/uploads/images/gallery/2023-09/reto-06.png)
# lectura sensor IR de suelo
La tarea consiste en visualizar en la pantalla de micro:bit (matriz de 25 leds) el estado de los sensores de infrarrojos de suelo. El sensor dará valor 1 a blanco y 0 a negro.
[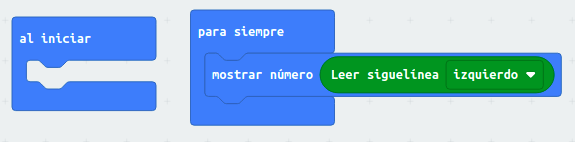](https://libros.catedu.es/uploads/images/gallery/2023-09/reto-07.png)
# seguidor de líneas
El reto consiste en hacer un siguelíneas negras, las líneas del circuito deben ser más anchas que la distancia entre los sensores infrarrojos de suelo del robot.
[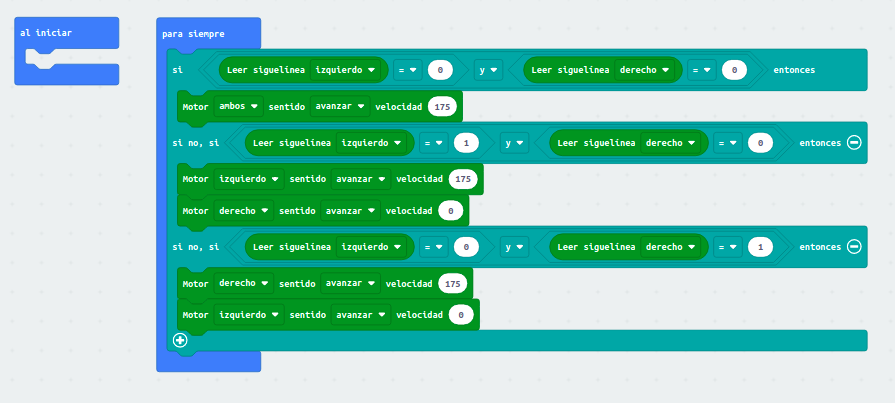](https://libros.catedu.es/uploads/images/gallery/2023-09/reto-08.png)
Si no tienes las líneas del circuito, y quieres imprimirlas o si quieres ver una versión más sofisticada [aquí](https://blog.330ohms.com/2019/08/28/tutorial-3-seguidor-de-linea-con-micro-maqueen/)
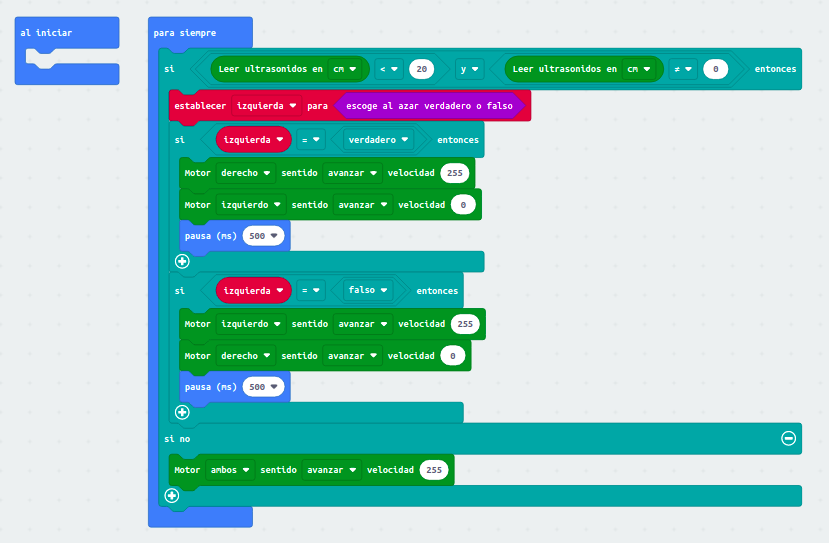
# evita-obstáculos
El reto consiste en que el robot evite obstáculos que estén a menos de 20 cm del mismo. Además cuando los evita lo hará aleatoriamente a derechas o izquierdas.
[](https://libros.catedu.es/uploads/images/gallery/2023-09/reto-09.png)
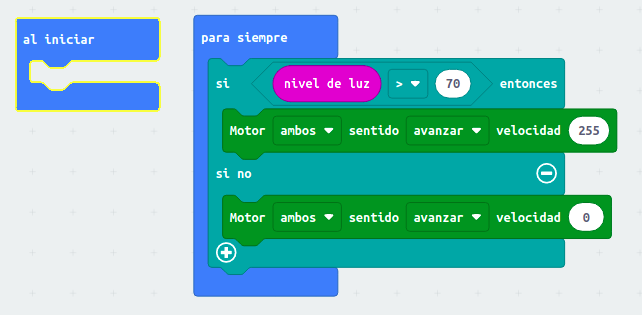
# seguidor de luz
El reto consiste en que le robot persiga una fuente luminosa a partir de cierto umbral de luz. Recordamos que el sensor de luz de la micro:bit se encuentra en la matriz de leds.
[](https://libros.catedu.es/uploads/images/gallery/2023-09/reto-10.png)
# Control remoto desde otra micro:bit con radio
Se trata de controlar el robot maqueen con otra micro:bit a través de la radio y con el acelerómetro. Jugando con las aceleraciones en el eje x (izquierda o derecha) controlamos a maqueen con los giros en los mismos sentidos. Modificando las aceleraciones en el eje y (adelante o hacia atrás) controlamos los movimientos del robot en esos sentidos.
Con este reto conseguimos un control remoto de maqueen a través del acelerómetro de otra micro:bit.
Código Micro:bit emisora:
[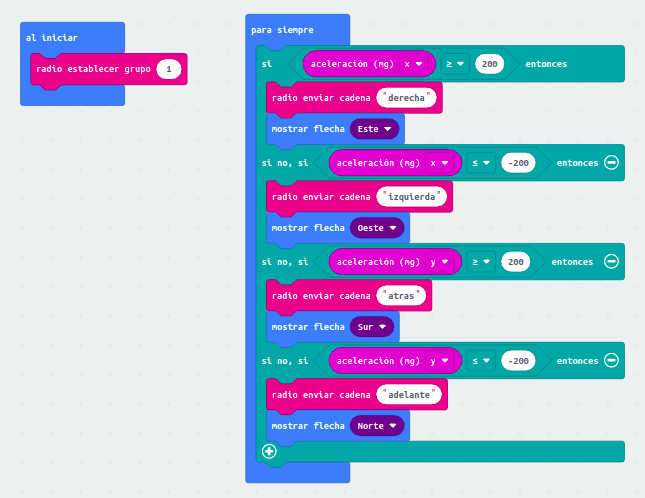](https://libros.catedu.es/uploads/images/gallery/2023-09/reto-11-e.png)
Código de Micro:bit de maqueen (receptora):
[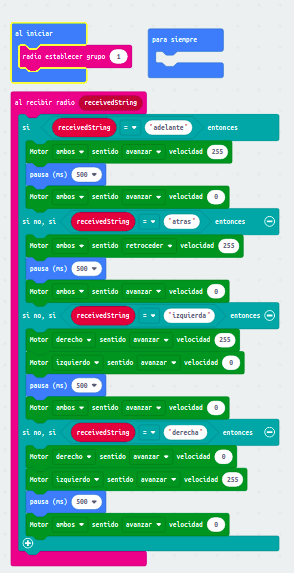](https://libros.catedu.es/uploads/images/gallery/2023-09/reto-11-r.png)
# persigue-objetos
El reto consiste en que maqueen rastree a derechas o izquierdas (al azar), si hay objetos en un radio menor a 20 cm, si lo encuentra lo persigue.
[](https://libros.catedu.es/uploads/images/gallery/2023-09/reto-12.png)
# Créditos
## **Autoría y licencias**
- Mario Monteagudo Alda CP EJEA
- **Microbit**
- **Música y sonido con micro:bit**
- **[Referencias](https://libros.catedu.es/books/escuela-40-bbc-microbit-en-el-aula/page/referencias)**
- Javier Quintana Peiró CATEDU
- **Retos avanzados Bluetooth**
- **Create AI**
- **Maqueen**
- **Smartcar**
- **Retos con la microbit**
- - Extraído de Almaribot.com José Franciso Muñoz
- **Retos Maqueen**
- Extraído de Retos con robot Maqueen [https://pedroruizf.github.io/maqueen\_retos/index.html](https://pedroruizf.github.io/maqueen_retos/index.html)
- Licencia CC-BY-SA 4.0
- Autor Pedro Ruiz
- **Dos prácticas con Cutebot**
- Extraído de Logros en Educación [https://gmedranotic.wordpress.com/2023/05/15/iniciacion-robotica-basica-dos-practicas-con-cutebot/](https://gmedranotic.wordpress.com/2023/05/15/iniciacion-robotica-basica-dos-practicas-con-cutebot/)
- Autor Guillermo Medrano [gmedranotic.wordpress.com](https://t.co/81FdhTXVFW) [@GmedranoTIC](https://twitter.com/GmedranoTIC)
- Licencia CC-BY-NC-SA
Cualquier observación o detección de error en [soporte.catedu.es](https://catedu.es/soporte-catedu/)
Los contenidos se distribuyen bajo licencia **Creative Commons** tipo **BY-NC-SA** excepto en los párrafos que se indique lo contrario.
[](https://libros.catedu.es/uploads/images/gallery/2022-03/image-1648462225402.gif)
[](https://libros.catedu.es/uploads/images/gallery/2022-03/image-1648462299882.png)
[](https://libros.catedu.es/uploads/images/gallery/2022-03/image-1648462361893.png)