# SmartCar. Dentro del curso Microbit+SmartCar
# SmartCar
Micro:BIT se queda un poco triste si no se "mueve", pero hay que tener en cuenta que en la robótica el movimiento se paga:
- Adición de motores, chasis, ruedas...
- Necesitas una electrónica añadida de potencia y control de los motores.
- Necesitas unos sensores de lo contrario el movimiento se queda insípido sin reacción al mundo exterior.
La placa de micro:BIT no incorpora movimiento, por eso cuesta tan poco, pero si quieres este extra tienes que pagar ([casi el doble de lo que cuesta micro:BIT](http://robotopia.es/kits-educativos/95-smart-car-para-microbit.html)). Aún así el conjunto sale más barato que [mBot](https://catedu.github.io/robotica-educativa-con-mbot/).
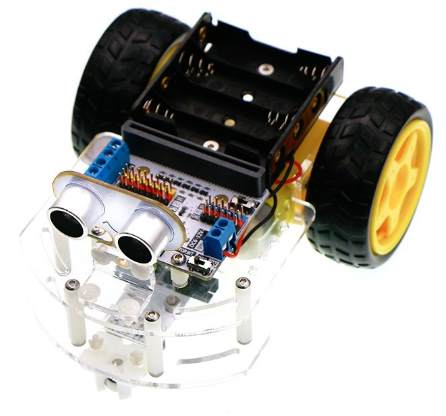
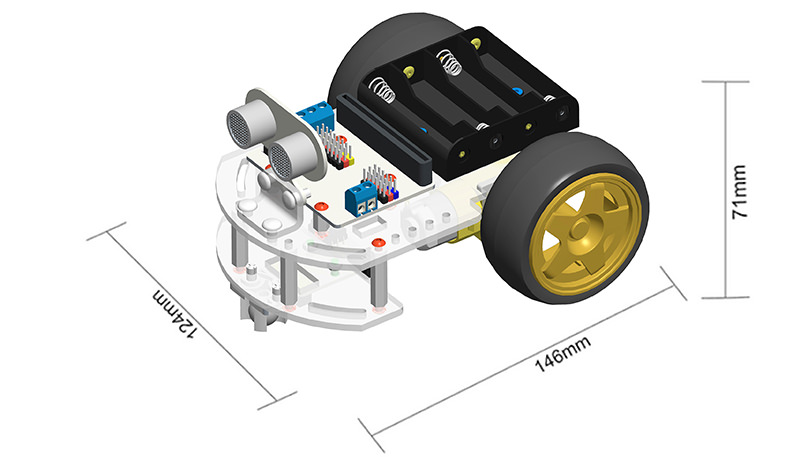
Este kit viene con sensor de ultrasonidos, sensor de sigue-lineas y la placa **motorbit** que se inserta la micro:BIT además de tener altavóz y salidas a puertos por si se quiere añadir servos por ejemplo. Para más información de esta placa consultar [esta web](https://www.elecfreaks.com/learn-en/motor_bit_v16/).
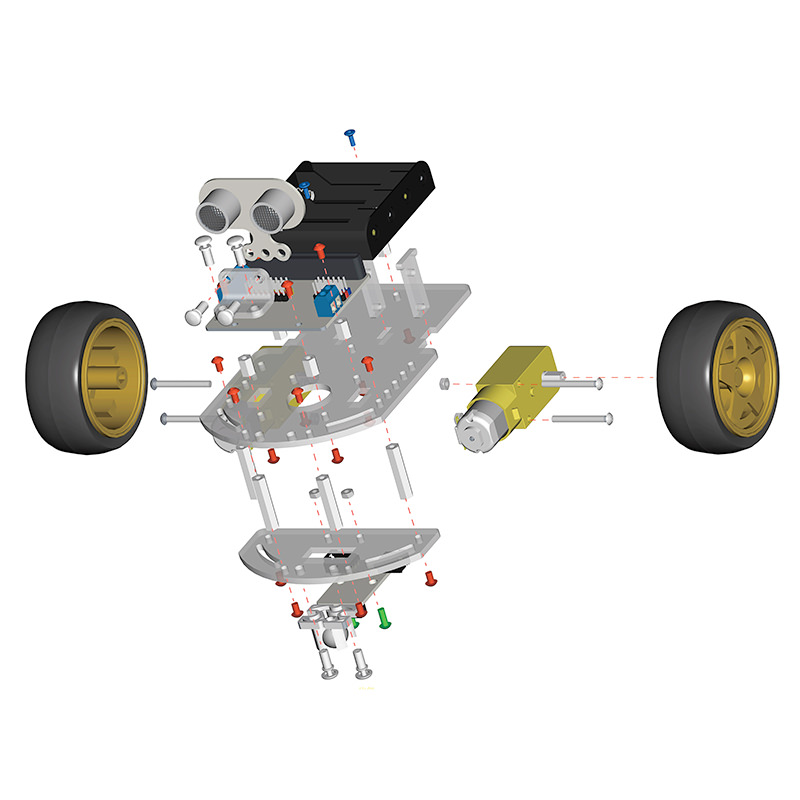
## Montaje
El paquete viene con unas piezas listas para montar que no requieren especial destreza DYC, lo único "*difícil*" es que hay que **soldar** los cables a los motores (4 pequeñas soldaduras).
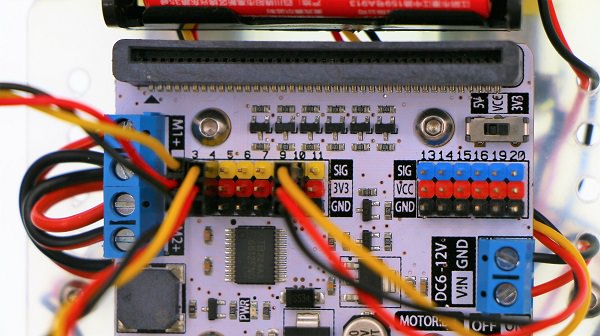
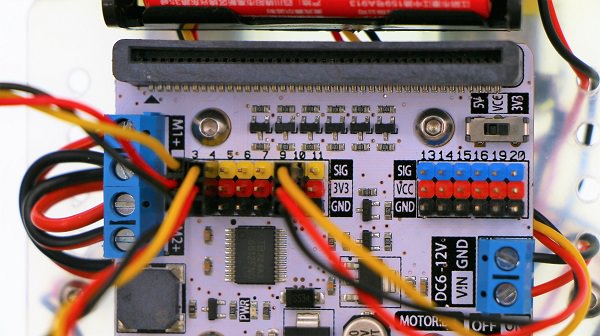
El sensor sigue-lineas y el sensor ultrasonidos se puede poner en cualquier pin, pero en este curso lo fijaremos en:
- Sensor ultrasonidos en el PIN 10
- Sensor siguelíneas izquierda en el PIN3
- Sensor siguelíneas derecha en el PIN4
Con un poco de paciencia se hace muy bien
Nosotros no somos comerciales, luego ésto mejor que no : 
## Conexión con Makecode
Para tener las instrucciones específicas, hay que entrar en Makecode https://makecode.microbit.org/#editor entrar en **AVANZADO** en **EXTENSIONES** y buscar la extensión **MOTORBIT** instalar, y ya está tenemos instalado las funciones específicas de este coche:
# Reto 1 Musica
SmartCar tiene incorporado un altavoz ya en el puerto P0 por lo tanto no es necesario hacer cocodrilos o papeles de aluminio [como hemos visto anteriormente](/pines_de_entrada_y_salida/reto-17-musica.md).
Vamos a hacer un programa que al pulsar el botón A suene música etc...
# Descripción del programa
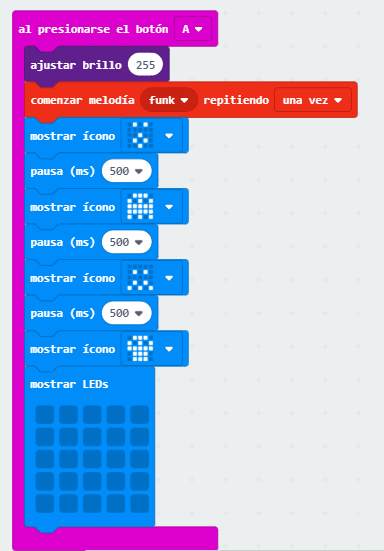
Es simplemente que si presiono el botón A pues que suene y salgan iconos por la pantalla:
Puedes probarlo en este simulador
Y [aquí](https://makecode.microbit.org/_hMmRRea9s76w) lo tienes para descargar:
# Sensor distancia
Al poner la extensión micromotor se añade la instrucción de sonar que está en otro apartado:
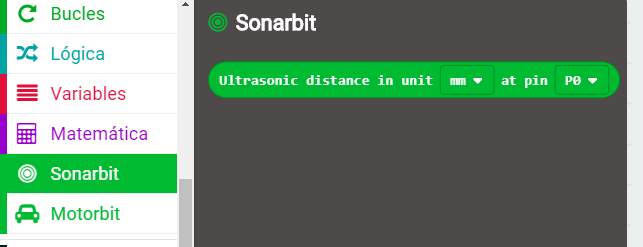
Este sensor, en nuestro kit lo conectaremos en **PIN 10** aunque puede estar conectado en cualquier otro. Además recomendamos crear una variable (por ejemplo "distancia") y poner las unidades de medida en cm que son más intuitivas. Esta instrucción se pone al principio del bucle y sólo hay que utilizar la variable **distancia**:

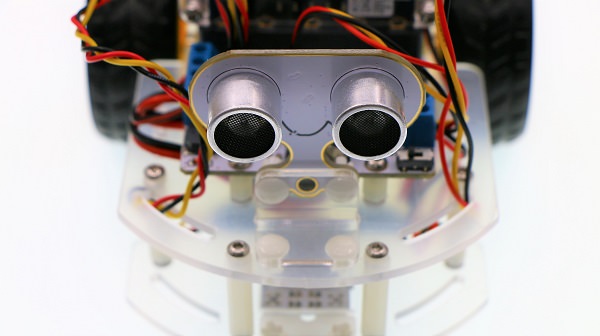
El sensor de distancia funciona igual que los sónares: Uno "ojo" es realmente un altavóz que emite un sonido con frecuencia alta (*ultrasonido, por eso no lo oímos*) y el otro "ojo" es un micrófono que recibe ese pulso. El circuito electrónico calcula la distancia con la diferencia de tiempo en emisión y la recepción del eco, igual que los rádares, sónares...
[via GIPHY](https://giphy.com/gifs/vintage-tech-4xGCaTMCO59le)
O incluso los murciélagos, delfines...
[via GIPHY](https://giphy.com/gifs/3o7TKu5aIDY4tU3SXm)
## Reto 2 Me quedo a 5cm
El siguiente reto es que el microCar se quede a 5cm
ATENCIÓN vamos a poner el sensor de ultasonidos en el PIN 10
### Solución
La solución se encuentra en esta página [https://www.elecfreaks.com/learn-en/motor\_bit\_smart\_car\_case\_02/](https://www.elecfreaks.com/learn-en/motor_bit_smart_car_case_02/)
El proyecto te lo puedes descargar [aquí](https://makecode.microbit.org/_9VkLeEM6MLu2)
### Reto
Que empiece parado y que se aleje si ponemos la mano, o sea, [intenta cogerme](https://catedu.github.io/robotica-educativa-con-mbot/sensor_distancia.html)
## Reto 3 Evitar obstáculos
¿Cómo no? lo pide a gritos ! vamos a hacer un [roomba](https://catedu.github.io/robotica-educativa-con-mbot/evitar_obstculos.html)
### Descripción del proyecto
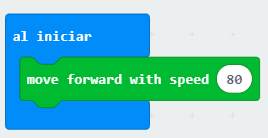
Empezamos el programa que al iniciar vaya recto:
Luego hacemos el bucle "para siempre": \* El sensor no funciona muy fino, hay veces que da *0 falsos* por lo tanto el bucle **si** ponemos una condición **si es mayor de 5 y es menor de 10** para quitarnos estos falsos positivos de obstáculos. \* si encuentra obstáculo, que pare un poco, que *recule* y que gire \* cada instrucción anterior con una pequeña pausa, cuanto más grande sea la pausa más *reculará*, girará etc.. \* si no encuentra obstáculo que siga recto

Aquí lo tienes en editor
### Reto
Si te fijas sólo gira a la derecha. Modifica el anterior programa para que gira a la derecha o a la izquierda de forma aleatoria.
# Sigue-lineas
El sigue-lineas son dos sensores que están colocados debajo del robot
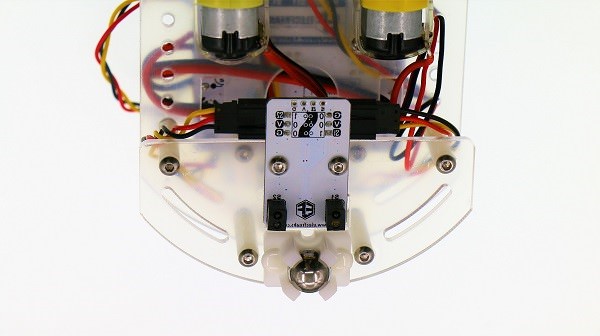
Por unificar criterios, los conectaremos en P3 y P4
Cada sensor tiene dos leds, uno emisor y otro receptor. El receptor recoge la luz reflejada, si hay debajo algo que no refleja la luz (por ejemlo una línea negra) entonces manda OFF en caso contrario ON
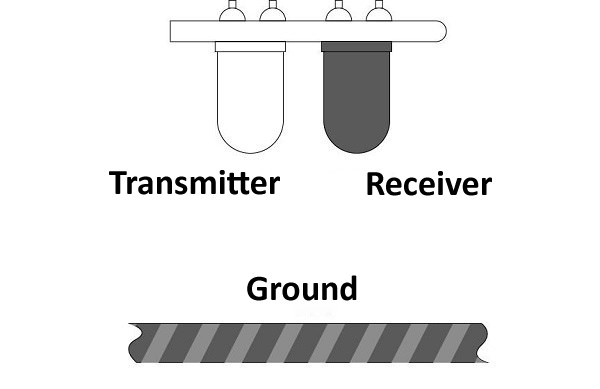
OJO VA AL REVÉS es decir \* cuando hay linea negra es OFF \* cuando no hay linea es ON
por lo tanto queremos:
- Que cuando sea OFF sea un 1 lógico (línea)
- Que cuando sea ON sea un 0 lógico (no hay línea)
Esto se llama **CONFIGURACIÓN PULL-UP** (pincha [aquí](https://catedu.github.io/programa-arduino-mediante-codigo/resistencias_pullup_y_pulldown.html) para saber más) luego lo primero que tenemos que hacer es configurar estos sensores como PULL-UP con estas instrucciones (han traducido **UP** como *subir*):
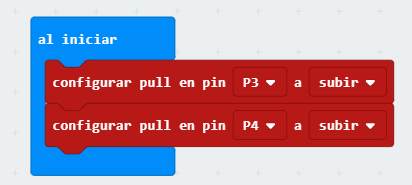
Están un poco escondidas:

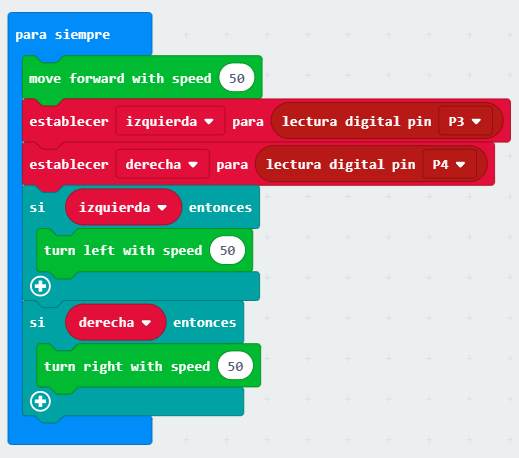
Y luego crear unas variables por ejemplo **izquierda** y **derecha** dentro del bucle que lean esos sensores. El resto del código sólo utilizaremos estas variables:

## Reto 4 Seguir la línea
Otro reto que pide a gritos este sensor:
> Consejo: en clase, antes de atacar con este reto, aconsejamos otro más sencillo como que el robot se mueva y si encuentra línea que se pare, este reto lo puedes ver [aquí](https://www.elecfreaks.com/learn-en/motor_bit_smart_car_case_01/)
## Descripción del programa
Al empezar configuraremos los sensores en PULL-UP tal y [como hemos explicado](/sigue-lineas.md):
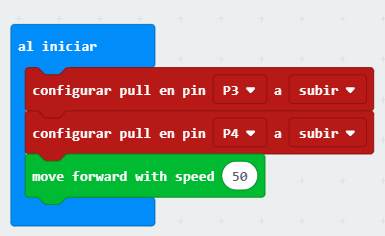
Luego entramos en el bucle donde simplemente dice:
- Sigue hacia delante
- Si te desvías hacia la derecha gira a la izquierda
- Si te desvías hacia la izquierda gira a la derecha
El programa tiene la pega que si aumentamos la velocidad, pierde la línea.
Evidentemente hay muchas versiones y mejoras, por ejemplo [aquí](https://www.elecfreaks.com/learn-en/motor_bit_smart_car_case_03/) pero ésta https://makecode.microbit.org/\_U3VP8JhVTXaJ es desde luego la versión más sencilla.
# Reto 5 Mando a distancia
Esta vez **vamos a utilizar dos micro:BITs**
## Descripción del programa
### Microbit que hace de mando
Este microBIT hay que alimentarlo con pilas o utilizando una batería típica de móvil.
El mando se inicia en un grupo (en este caso el 222) y simplemente realiza lo siguiente: \* Si se pulsa A manda un 1 y lo visualizo \* Si se pulsa B manda un 2 y lo visualizo \* Si se pulsa A+B manda un 3 y lo visualizo
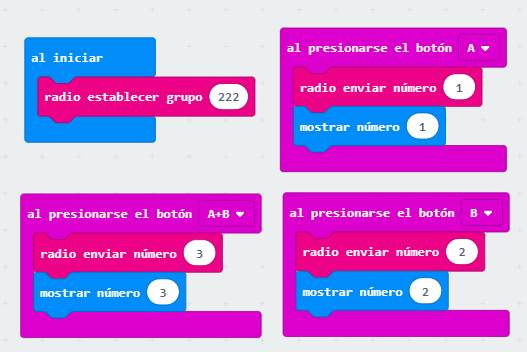
El programa te lo puedes descargar [aquí](https://makecode.microbit.org/_cWz6s9aeTPXr):
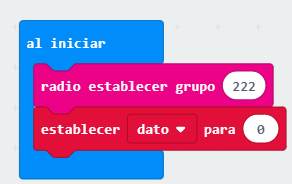
### Microbit que está en SmartCar
Al iniciar el programa asigna este microbit al mismo grupo de radio que el mando y además asigna una nueva variable con valor 0
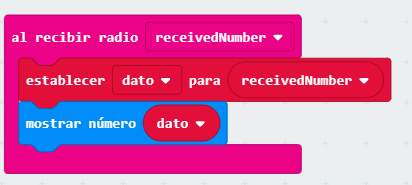
Al recibir un número lo asigna a esa variable y además lo muestra:
Y establecemos un bucle por siempre que :
- Si no ha recibido nada, es por lo tanto dato=0 luego que siga hacia delante
- Si recibe 1 que gire hacia la derecha y hacia atrás
- Si recibe 2 igualmente pero al otro lado
- Si recibe 3 que pare
- En los tres casos anteriores damos un tiempo para que ejecute la instrucción con una pausa y luego reseteamos dato para que siga el robot su camino
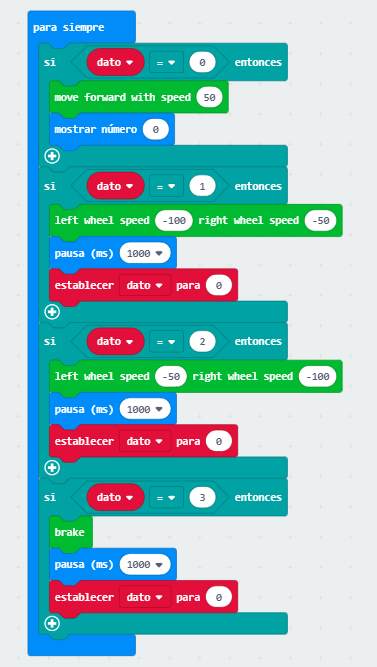
El proyecto te lo puedes descargar [aquí](https://makecode.microbit.org/_ftuFv8AReFYq) :