# Sensor distancia
Al poner la extensión micromotor se añade la instrucción de sonar que está en otro apartado:
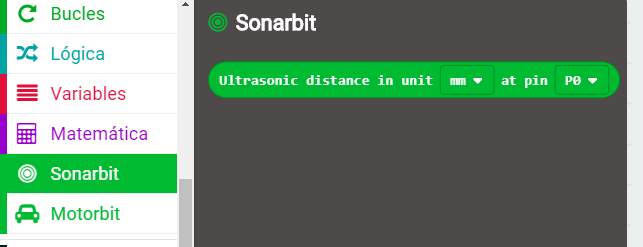
Este sensor, en nuestro kit lo conectaremos en **PIN 10** aunque puede estar conectado en cualquier otro. Además recomendamos crear una variable (por ejemplo "distancia") y poner las unidades de medida en cm que son más intuitivas. Esta instrucción se pone al principio del bucle y sólo hay que utilizar la variable **distancia**:

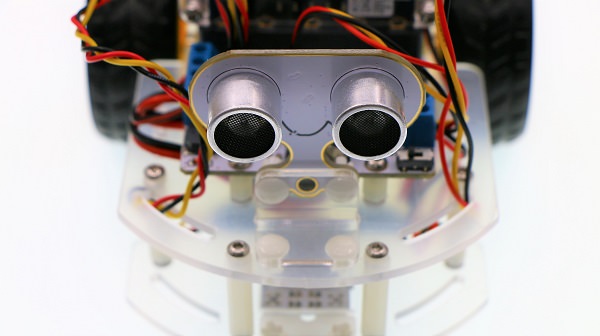
El sensor de distancia funciona igual que los sónares: Uno "ojo" es realmente un altavóz que emite un sonido con frecuencia alta (*ultrasonido, por eso no lo oímos*) y el otro "ojo" es un micrófono que recibe ese pulso. El circuito electrónico calcula la distancia con la diferencia de tiempo en emisión y la recepción del eco, igual que los rádares, sónares...
[via GIPHY](https://giphy.com/gifs/vintage-tech-4xGCaTMCO59le)
O incluso los murciélagos, delfines...
[via GIPHY](https://giphy.com/gifs/3o7TKu5aIDY4tU3SXm)
## Reto 2 Me quedo a 5cm
El siguiente reto es que el microCar se quede a 5cm
ATENCIÓN vamos a poner el sensor de ultasonidos en el PIN 10
### Solución
La solución se encuentra en esta página [https://www.elecfreaks.com/learn-en/motor\_bit\_smart\_car\_case\_02/](https://www.elecfreaks.com/learn-en/motor_bit_smart_car_case_02/)
El proyecto te lo puedes descargar [aquí](https://makecode.microbit.org/_9VkLeEM6MLu2)
### Reto
Que empiece parado y que se aleje si ponemos la mano, o sea, [intenta cogerme](https://catedu.github.io/robotica-educativa-con-mbot/sensor_distancia.html)
## Reto 3 Evitar obstáculos
¿Cómo no? lo pide a gritos ! vamos a hacer un [roomba](https://catedu.github.io/robotica-educativa-con-mbot/evitar_obstculos.html)
### Descripción del proyecto
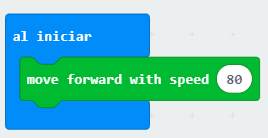
Empezamos el programa que al iniciar vaya recto:
Luego hacemos el bucle "para siempre": \* El sensor no funciona muy fino, hay veces que da *0 falsos* por lo tanto el bucle **si** ponemos una condición **si es mayor de 5 y es menor de 10** para quitarnos estos falsos positivos de obstáculos. \* si encuentra obstáculo, que pare un poco, que *recule* y que gire \* cada instrucción anterior con una pequeña pausa, cuanto más grande sea la pausa más *reculará*, girará etc.. \* si no encuentra obstáculo que siga recto

Aquí lo tienes en editor
### Reto
Si te fijas sólo gira a la derecha. Modifica el anterior programa para que gira a la derecha o a la izquierda de forma aleatoria.