No sigas las instrucciones de Project Book aquí [https://picobricks.com/pages/projectbook](https://picobricks.com/pages/projectbook) **NO funcionan**. Las siguientes instrucciones **sí que funcionan** y son de ***[Bricogeek](https://lab.bricogeek.com/tutorial/como-programar-raspberry-pi-pico-con-arduino/configurar-ide-de-arduino-para-raspberry-pi-pico)** Licencia CC-BY (hay muchas páginas con las mismas instrucciones pon en un buscador raspberry pico arduino ide )*
Nos vamos a **Archivo-Preferencias** y le decimos que ponga el siguiente directorio para las librerías : [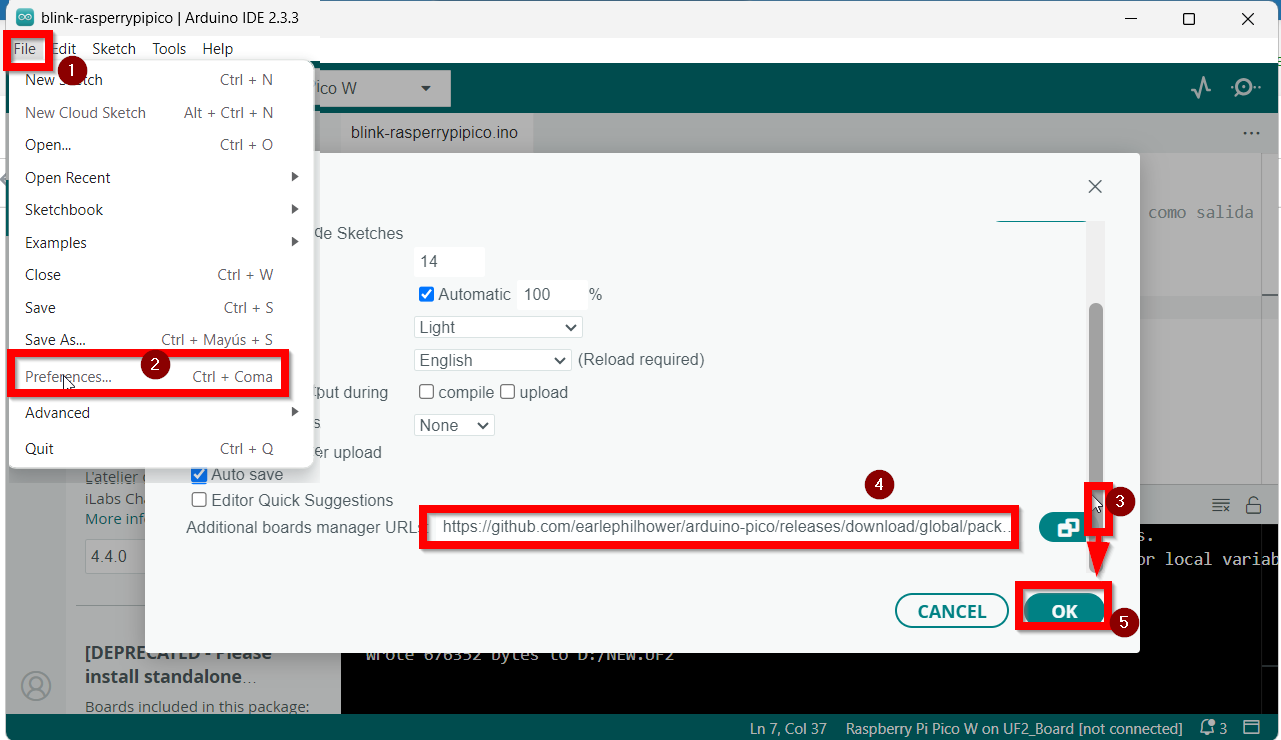](https://libros.catedu.es/uploads/images/gallery/2024-12/2024-12-27-23-43-03-editing-page-conexion-con-arduino-ide-libreria-catedu.png) Esta es la URL que pegar para que cargue placas que no vienen por defecto : ```c https://github.com/earlephilhower/arduino-pico/releases/download/global/package_rp2040_index.json ``` Una vez puesto nos vamos a **Boards manager**.. [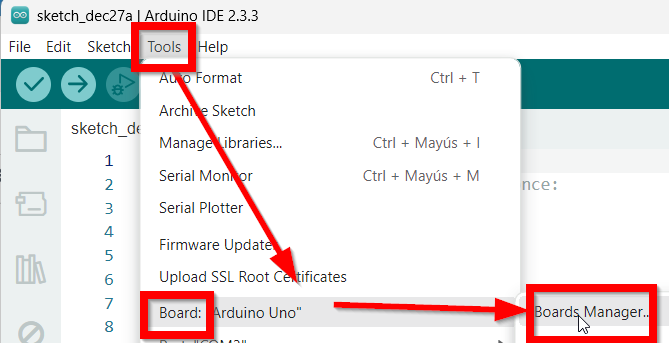](https://libros.catedu.es/uploads/images/gallery/2024-12/2024-12-27-08-50-07-sketch-dec27a-arduino-ide-2-3-3.png) Y ponemos **RP2040** en el buscador, aparecerá este software, **Raspberry Pi Pico/RP2040** Lo instalamos [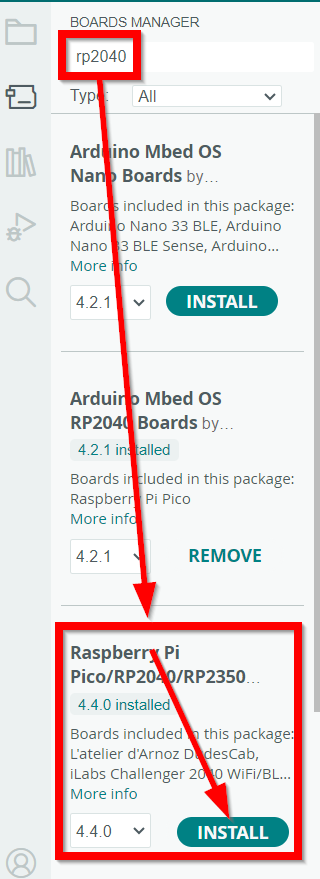](https://libros.catedu.es/uploads/images/gallery/2024-12/2024-12-27-23-54-30-blink-rasperrypipico-arduino-ide-2-3-3.png){{@12670#bkmrk-atenci%C3%93n-desconectam}}
Una vez puesto en modo Booloader seleccionamos la placa **Raspberry Pi Pico W** (4) y también seleccionamos el puerto (5) **UF2\_Board** [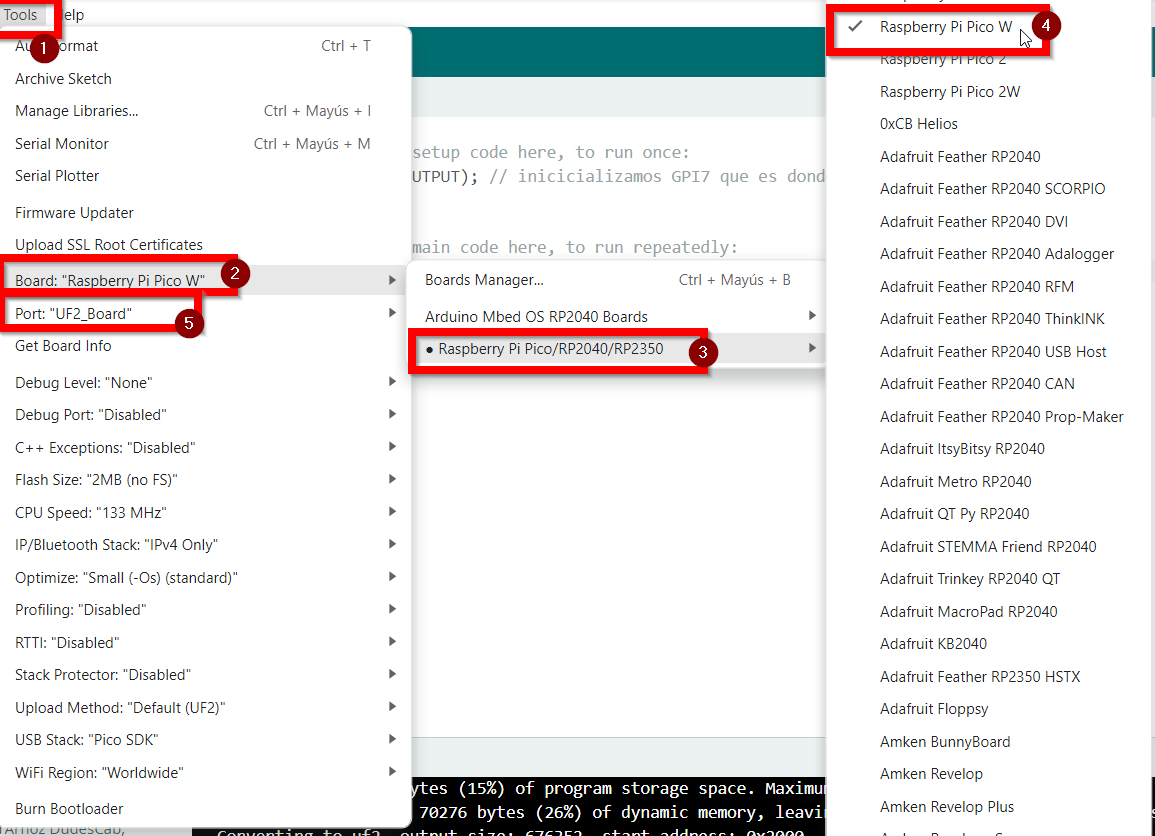](https://libros.catedu.es/uploads/images/gallery/2024-12/2024-12-27-23-57-06.png) También puede salir otro tipo de puerto como este que dice que es el RP2040 Rasbberry Pi Pico W [](https://libros.catedu.es/uploads/images/gallery/2024-12/2024-12-28-00-00-32.png). En resumen tiene que salir abajo a la derecha que esta conectado [](https://libros.catedu.es/uploads/images/gallery/2024-12/2024-12-27-08-59-03-sketch-dec27a-arduino-ide-2-3-3.png) # El primer programa con Arduino IDE: Blink Entramos en Arduino IDE configurado según la página anterior (Board: Raspberry Pi y el puerto COM que corresonda) y pegamos el siguiente código: ```c void setup() { // put your setup code here, to run once: pinMode(7, OUTPUT); // inicicializamos GPI7 que es donde esta el ledrojo como salida } void loop() { // put your main code here, to run repeatedly: digitalWrite(7, HIGH); //encendemos led rojo delay(1000); //espera 1 segundo digitalWrite(7, LOW); //apagamos led rojo delay(1000); //espera 1 segundo } ``` Ponemos el código en el área **1,** pulsamos **2** para compilar, y finalmente **3** para que lo suba a PicoBricks, cuando aparezca el mensaje **wrote...** en 4 ya podemos ver que el led rojo empieza a parpadear [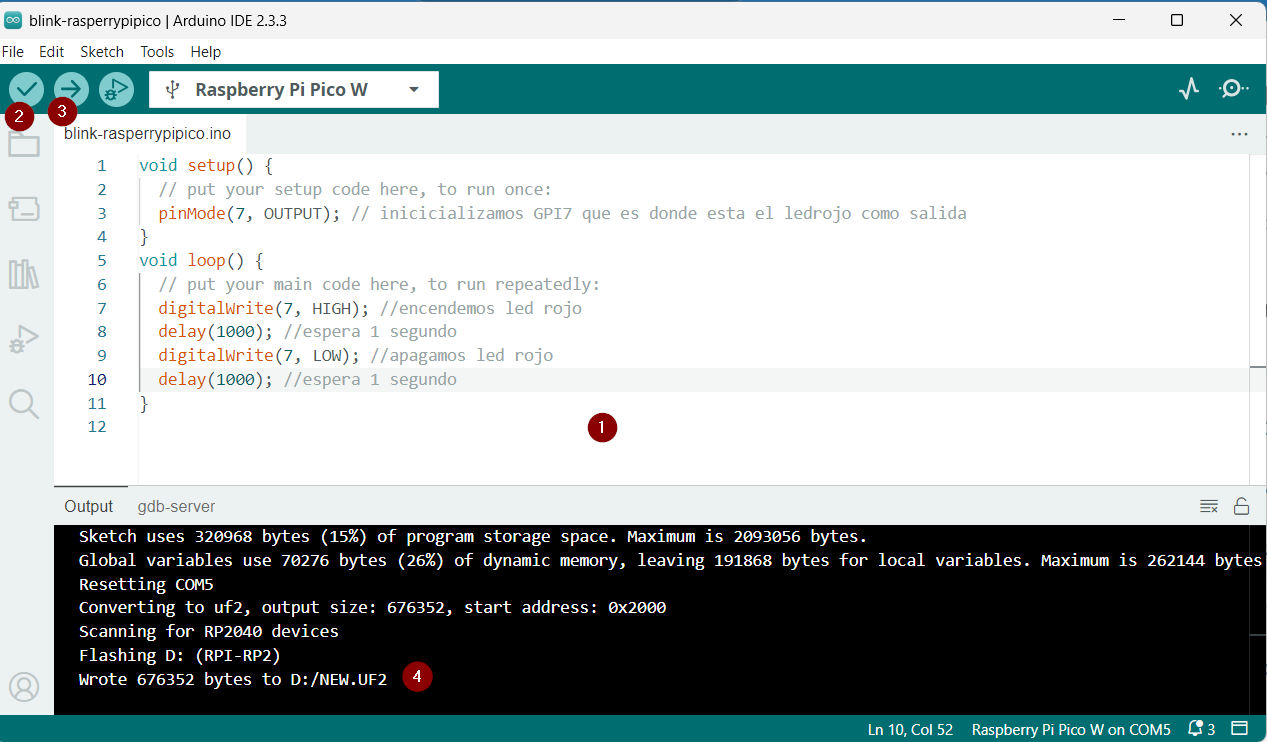](https://libros.catedu.es/uploads/images/gallery/2024-12/2024-12-28-08-38-02-blink-rasperrypipico-arduino-ide-2-3-3.png)Por cierto, el programa **se queda cargado** pruébalo! desenchúfalo del ordenador, alimenta PicoBricks con un PowerBank o un cargador de móvil con el cabla USB y ¡¡ **sigue funcionando !!!**
# Proyectos {{@12689}} # Proyectos con Wifi ##### **ScanNetworks ** Podemos ir a Ejemplos y vamos a ejecutar el **ScanNetworks** que no requiere contraseñas de wifi [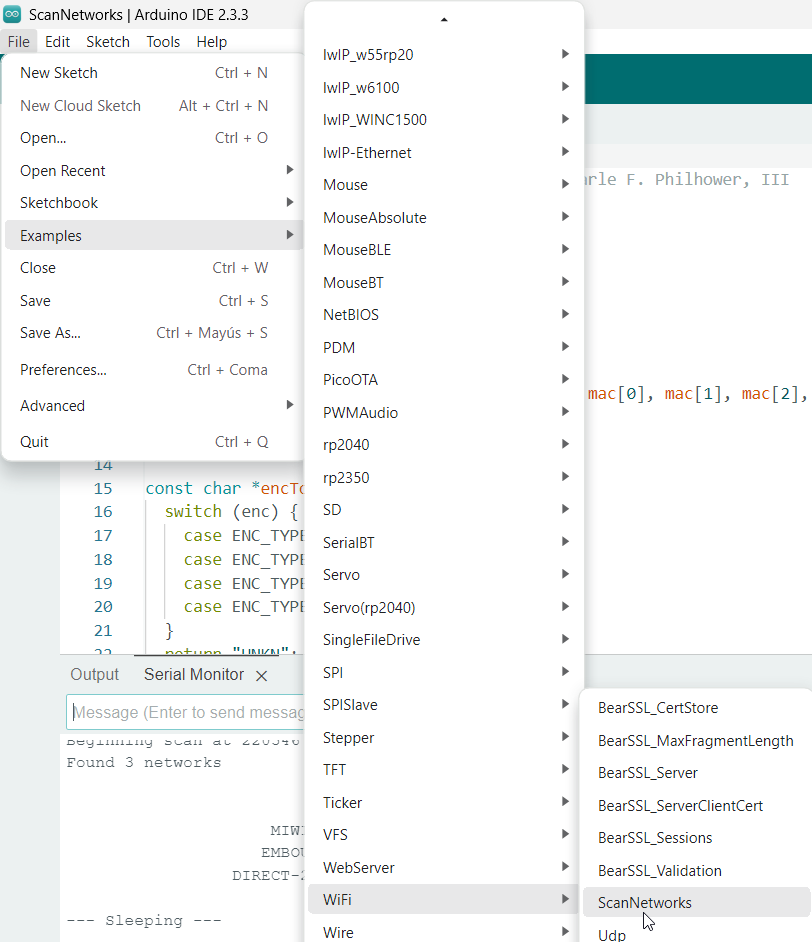](https://libros.catedu.es/uploads/images/gallery/2025-01/2025-01-04-20-11-51.png) Al ejecutarlo nos sale en la ventana de monitor serie las wifis que encuentra [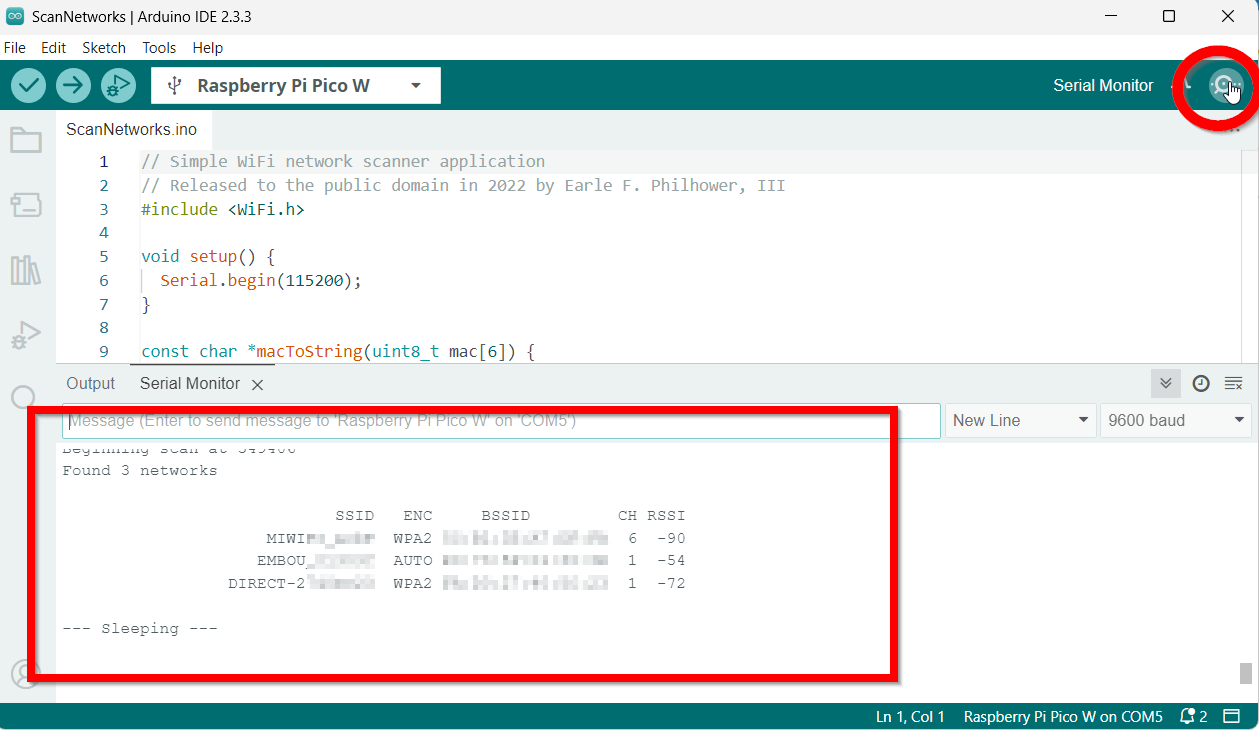](https://libros.catedu.es/uploads/images/gallery/2025-01/2025-01-04-20-13-59-scannetworks-arduino-ide-2-3-3.png) ##### **WifiClient** Si nos vamos a este ejemplo: [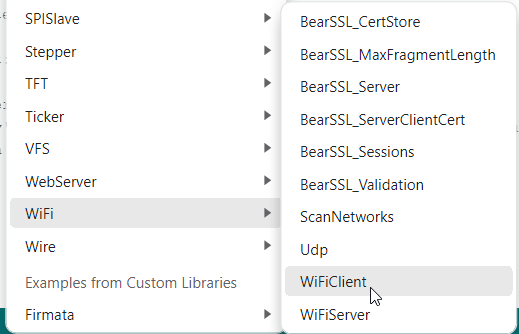](https://libros.catedu.es/uploads/images/gallery/2025-01/2025-01-04-20-31-01.png) Tenemos que ir a las líneas 9 y 10 para poner nuestra wifi y contraseña: ```c #define STASSID "aquituwifi" #define STAPSK "aqui tu contraseña" ``` Al ejecutarlo llama a esta dirección definida en las líneas 16 y 17 ``` const char* host = "djxmmx.net"; const uint16_t port = 17; ``` Y sale **la cita del día** cada 5 minutos en el puerto serie ``` WiFi connected IP address: 192.168.1.48 connecting to djxmmx.net:17 sending data to server receiving from remote server "Thomas wants to get it in quickly, and...Now there's a steal by Bird! Underneath to DJ, lays it in! 1 second left, what a play by Bird!" - 1987 NBA Eastern Conference Finals closing connection connecting to djxmmx.net:17 sending data to server receiving from remote server "Oh oh oh oh oh ooh, why'd you have to go oh, away from all, me love, why you leave me, w-why you leave me?..." - Sean Kingston (Me Love) closing connection connecting to djxmmx.net:17 sending data to server receiving from remote server "I wanna run away, with you, cuz baby you're my everything..." - Frankie J. (Run Away) closing connection ``` ##### **Encender y apagar un led** De [https://dronebotworkshop.com/picow-arduino/](https://dronebotworkshop.com/picow-arduino/) hemos conseguido este código, donde Raspberry actúa como cliente, pero esta pensado para encender y apagar el led integrado en la Rasberry Pi Pico W, así que le hemos añadido el Led rojo de PicoBrick que esta en GPI7 - En la línea 43 el pin 7 como salida **pinMode(7,OUTPUT);** - En la línea 97 que encienda el pin 7 también **digitalWrite(7, HIGH);** - En la línea 102 que apague el pin 7 también **digitalWrite(7, LOW);** - Acuérdate de poner en las líneas 17 y 18 tu wifi ```c /* Pico W Web Interface Demo picow-web-control-demo.ino Web Interface & WiFi Connection Control the onboard LED with Pico W Adapted from ESP32 example by Rui Santos - https://randomnerdtutorials.com DroneBot Workshop 2022 https://dronebotworkshop.com */ // Load Wi-Fi library #includeOnboard LED is " + picoLEDState + "
"); // Set buttons if (picoLEDState == "off") { //picoLEDState is off, display the ON button client.println(""); } else { //picoLEDState is on, display the OFF button client.println(""); } client.println(""); // The HTTP response ends with another blank line client.println(); // Break out of the while loop break; } else { // if you got a newline, then clear currentLine currentLine = ""; } } else if (c != '\r') { // if you got anything else but a carriage return character, currentLine += c; // add it to the end of the currentLine } } } // Clear the header variable header = ""; // Close the connection client.stop(); Serial.println("Client disconnected."); Serial.println(""); } } ``` Al ejecutarlo, nos aparece por el puerto serie la IP que se ha conectado: [](https://libros.catedu.es/uploads/images/gallery/2025-01/2025-01-04-21-41-16-encender-apagar-led-picobricks-wifi-arduino-ide-2-3-3.png) Entramos en un navegador en un ordenador conectado a la misma wifi en la dirección 192.168.1.48 y este es el resultado: ##### **¿Y con un servo?** Si tienes un servo puedes conectarlo y también puedes utilizar el código que aparece en De [https://dronebotworkshop.com/picow-arduino/](https://dronebotworkshop.com/picow-arduino/) con las conexiones que indican