Queremos que se mueva un servo motor (ángulo de 0º a 180º) en función del potenciómetro, conectado a GP27 por lo tanto sus valores van de 0 a 65535 (que es 2 elevado a 16)
##### **Hardware** 1. Conectamos un servo en el slot correspondienteOjo, fíjate que tienes que conectar el pin - con el marrón. Mira la foto
2. Movemos el Jumper a la posición que conecte GP21 con Servo [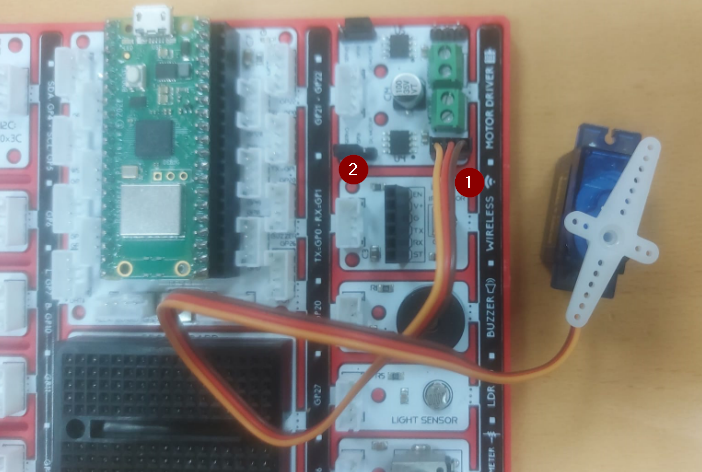](https://libros.catedu.es/uploads/images/gallery/2025-01/2025-01-09-13-38-03-whatsapp.png) ##### **Mapeo** Utilizaremos la situación G de **mapeo** [https://libros.catedu.es/books/pico-bricks/page/mapeo](https://libros.catedu.es/books/pico-bricks/page/mapeo) por lo tanto dividiremos la posición del potenciómetro por 364 ##### **Software** El programa es el siguiente: [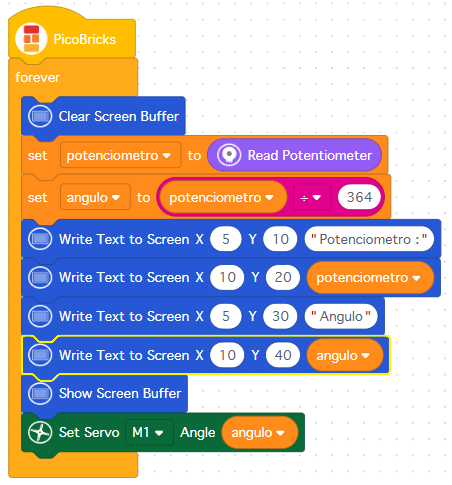](https://libros.catedu.es/uploads/images/gallery/2025-01/2025-01-09-13-44-34-picobricks-blocks.png)No utilizar esta instrucción [](https://libros.catedu.es/uploads/images/gallery/2025-01/2025-01-09-13-45-20-picobricks-blocks.png)
##### **Resultado****Te atreves a...** manejar dos servos, por ejemplo con el mando a distancia de IR