Pon un Escornabot en tu vida
- Introducción
- Componentes
- Guía de montaje
- Instalar programación
- Solución de problemas en la carga del programa. Usb driver
- Modificar programación
- Material para trabajar en clase
- Añadir módulo Bluetooth BLE
- Programación con mBlock
- Pensamiento computacional
- Créditos
Introducción
Escornabot es un proyecto de código abierto que nace en Galicia.
Todo empieza en la asociación de makers Bricolabs, allí coinciden tres personas:
- Tucho Méndez aporta la idea inicial.
- Xoan Sampaiño diseña las piezas 3D.
- Rafa Couto realiza la programación para Arduino.
Deciden crear un robot libre para poder trabajar en el aula la robótica educativa sin depender de una marca comercial.
Con el tiempo se van sumando otras personas:
- Xabier Rosas diseña las nuevas PCB.
- Jorge Lobo profesor y maker, aporta diversas aplicaciones para el aula a través de su blog.
- Miguel Gesteiro desarrolla la aplicación MUWI y Bluetooth BLE junto a Ismael Serrano.
Entre todos van aportando una documentación que otras personas hemos ido aprovechado para difundir el proyecto.
Para comprender la filosofía del proyecto, imprescindible ver dos vídeos de Tucho Méndez:
El primero, en Arduino day 2015 organizado por Makers Lugo.
El segundo, en el I Encuentro Coruña Dixital 2016. Proyectos abiertos de programación y robótica educativa, la experiencia de escornabot.
En este curso haréis algo parecido a esto:
Ver aquí otra versión más cómica ;-)
Componentes
Puedes consultar los enlaces a todos los componentes en esta web
Hay muchas versiones, nos vamos a centrar en la versión DIY - Brivoi Audacius
En este apartado veremos todos los componentes explicando de manera simple su funcionamiento, eso te permitirá solucionar cualquier problema que vaya surgiendo.
No te asustes, no entraremos en detalles técnicos.
Piezas impresas 3D
Sostienen el resto de componentes y conforman el chasis del robot, se pueden imprimir en diferentes materiales. El más utilizado suele ser un plástico llamado PLA por ser el más económico y simple de imprimir, con una altura de capa entre 0.2 y 0.3 mm. AingeruJM nos reporta el consejo de Rafa Couto:
Cono relleno 20%, 2 contornos, 3 capas inferiores y superiores debería quedarte bien sin esfuerzo en la mayoría de las impresoras.
En una de la columna aparece "nombre del archivo .stl" es el tipo de formato que utilizan los programas de las impresoras 3D para poder leer e imprimir la pieza, si pinchas encima puedes descargar el archivo.
Piezas exclusivas de la versión DIY
| Nombre del archivo .stl | Descripción | Imagen |
|---|---|---|
| PCBAddon-KeypadBracket-5Buttons.stl | Sujeción placa botonera |  |
| board-bracket.stl | Sujeción protoboard 170 puntos |  |
Piezas comunes con otras versiones
| Nombre del archivo .stl | Descripción | Imagen |
|---|---|---|
| ballcaster-v2.stl | Sujeción bola v2 |  |
| battery-bracket.stl | Sujeción batería o portapilas AA |  |
| MotorBracket.stl | Sujeción motores |  |
| wheel-l.stl | Rueda Izquierda |  |
| wheel-r.stl | Rueda derecha |  |
Placa Botonera

Incorpora los botones de acción y es la encargada de transmitir las órdenes de los movimientos al cerebro (placa Arduino Nano)
A través de los tres pines acodados GND, Sig y 5V (los tres pinchos de la perte superior derecha de la imagen) se conecta a la protoboard (la veremos más abajo)
Si miramos uno a uno sus componentes:
| Unidades | Componentes |
|---|---|
| 1 | PCB Diseñada por XDeSIG |
| 5 | Resistencias cerámicas 10k 1/4W 5% |
| 1 | Resistencia cerámica 22k 1/4W 5% |
| 5 | Pulsadores 12x12x7.3 con carcasas de colores |
| 3 | Pines acodados |
Tienes una guía de soldadura, con cada uno de los pasos a seguir para ensamblar los componentes.
Arduino NANO
Es el cerebro del robot y donde cargaremos nuestro código a través de una conexión Micro o Mini-USB para conectarlo a nuestro ordenador.
Tiene dos filas de pinchos o patillas soldados en cada lateral y lo pondremos sobre la protoboard.

Cada pincho esta conetado a un PIN que viene marcado con un nombre concreto y tiene una función concreta.. En esta imagen, sacada de la web de Luis Llamas puedes ver la correspondencia:

¿Qué necesitas saber?
No hace falta comprender el funcionamiento completo de la placa, con entender porque vamos a utilizar los pines donde conectaremos Escornabot es suficiente. Si alguien tiene interés en adquirir conocimiento extra, durante el curso tendrá enlaces a páginas web donde poder conseguirlo.
Placa botonera
Utilizaremos tres cables (también llamados hilos), aunque con dos sería suficiente:
| PIN Arduino NANO | ¿Por qué? |
|---|---|
| 5V | 5V - Alimentar la placa botonera |
| A4 | Sig - Transmitir las ordenes de los botones a la placa Arduino NANO para que luego esta de las ordenes a los motores. |
| GND | GND - Aunque no es correcto del todo lo llamaremos tierra o masa que es un término más conocido. |
Porta Pilas
| PIN Arduino NANO | ¿Por qué? |
|---|---|
| VIN | El portapilas contiene 4 pilas de 1,5 V así que la entrada de corriente será de 6V y este es el único PIN que admite corriente desde 6V a 12V. |
| GND | Tierra o masa |
Drivers ULN2003
| PIN Arduino NANO | ¿Por qué? |
|---|---|
| VIN | En esta placa van conectados los motores y necesitaremos conectarlo a este pin para poder coger corriente del Porta Pilas que conectaremos justo encima de los dos cables de corriente de los drivers. |
| GND | Tierra o masa |
| D9, D8, D7, D6 (en algunas placas 9, 8, 7, 6) | Conexión del motor izquierdo al Arduino Nano para poder recibir las ordenes de los movimientos y transmitirlas posteriormente al motor. |
| D5, D4, D3, D2 (en algunas placas 5, 4, 3, 2) | Conexión del motor derecho al Arduino Nano para poder rescibir las ordenes de los movimientos y transmitirlas posteriormente al motor. |
Buzzer 5V
| PIN Arduino NANO | ¿Por qué? |
|---|---|
| D10 (en algunas placas 10) | Para poder recibir las ordenes del Arduino NANO y ejecutar los pitidos según las pulsaciones de los botones. |
| GND | Tierra o masa |
Motores paso a paso 28BY J-48
Es el componente que hace posible el desplazamiento del robot. Se mueven por pequeños pasos para avanzar en un sentido u otro.
Si quieres ampliar información, una entrada de Prometec.net

Imagen de Prometec.net
El conector blanco va colocado a un Driver ULN2003 del que recibirá tanto la alimentación como las órdenes. Una comprobación simple para ver si el funcionamiento es correcto, girar la rueda y ver si se encienden los LEDs de la parte inferior en los Drivers.
Un problema que puede darnos dolores de cabeza es tener un cableado de motores incorrecto. Nos daremos cuenta porque teniendo todo en su sitio y la programación bien, nuestro escornabot invierte algunos movimientos de la botonera. El robot se diseñó y programó para funcionar con los motores conectados de una manera concreta, lo tienes explicado en esta entrada.
Drivers ULN2003
En el conector blanco de la placa pondremos los motores. Cada motor debe ir conectado al driver de su lado o el robot se movera al contrario de las ordenes que le demos.
Encima del conector blanco tenemos cuatro pines o pinchos que son los que conectaremos a los pines D9-D2 de la placa Arduino NANO.
A la izquierda tenemos dos pines o pinchos que son los encargados de recibir la alimentación del portapilas, están marcados con la serigrafía 5-12V y +/-

Recuerda el cuadro de conexiones:
| PIN Arduino NANO | PIN Driver | ¿Por qué? |
|---|---|---|
| VIN | 5-12V (+) | En esta placa van conectados los motores y necesitaremos conectarlo a este pin para poder coger corriente del Porta Pilas que conectaremos justo encima de los dos cables de corriente de los drivers. |
| GND | 5-12V (-) | Tierra o masa |
| D9, D8, D7, D6 (en algunas placas 9, 8, 7, 6) | IN1, IN2, IN3, IN4 | Conexión del motor izquierdo al Arduino Nano para poder recibir las ordenes de los movimientos y transmitirlas posteriormente al motor. |
| D5, D4, D3, D2 (en algunas placas 5, 4, 3, 2) | IN1, IN2, IN3, IN4 | Conexión del motor derecho al Arduino Nano para poder rescibir las ordenes de los movimientos y transmitirlas posteriormente al motor. |
Protoboard 170 puntos
En esta placa colocaremos el Arduino NANO y nos servirá de enlace con el resto de componentes.
El funcionamiento es simple, sirve para ampliar las conexiones a los pines de la placa Arduino.
Los huecos que queden encima o debajo de cada pin son una extensión del mismo, con una imagen se entiende mejor.

Si quieres ampliar información, una entrada de rinconingenieril.es
Buzzer 5V
Es el altavóz que dota de sonido a Escornabot, cada vez que pulsemos una tecla emitirá un pitido.
Tiene una patilla larga o positivo y una patilla corta o negativo. Si las dos patillas tienen la misma longitud en la parte delantera tienen serigrafiado el valor positivo.

Recuerda el cuadro de conexiones:
| PIN Arduino NANO | Buzzer 5V | ¿Por qué? |
|---|---|---|
| D10 (en algunas placas 10) | Patilla larga (+) | Para poder recibir las ordenes del Arduino NANO y ejecutar los pitidos según las pulsaciones de los botones. |
| GND | Patilla corta (-) | Tierra o masa |
Portapilas 4 unidades AA
El portapilas proporciona la energía para el movimiento del robot.

Lleva 4 pilas del tipo AA, hay que fijarse al introducir las pilas para hacerlo en el sentido correcto. Parece algo evidente pero no sería la primera, ni la última vez que una persona las coloca mal y se coge un buen calentón.
Una regla que suelo usar con los peques:
- La parte plana de la pila, va siempre en el lado del muelle
- La parte de la pila que tiene un saliente, en el otro lado.
Recuerda el cuadro de conexiones:
| PIN Arduino NANO | Portapilas | ¿Por qué? |
|---|---|---|
| VIN | Cable rojo (+) | El portapilas contiene 4 pilas de 1,5 V así que la entrada de corriente será de 6V y este es el único PIN que admite corriente desde 6V a 12V. |
| GND | Cable negro (-) | Tierra o masa |
La terminación de los cables se puede crimpar para tener un conector macho en el extremo.
Cables Arduino macho-hembra
Se llaman cables dupont pero me gusta llamarlos cables Arduino porque así cualquier persona lo entiende. Utilizaremos cables macho-hembra, que son los que tienen el pincho en un lado y el hueco en el otro.
Vienen en tiras de 40 y esta es la forma en la que me gusta separarlos:

- Marrón
- Rojo
- Cuatro colores juntos; azul, verde, amarillo y naranja
- Dos colores juntos; violeta y gris
- Blanco
- Negro
- Marrón
- Rojo
- Cuatro colores juntos; azul, verde, amarillo y naranja
- Tres colores juntos; violeta, gris y blanco
- Negro
Con estos cables realizaremos la conexión entre los diferentes componentes, un par de consejos:
- Si ves que el cable no entra en la protoboard, no fuerces. Gira 90 grados antes de volver a intentarlo.
- Cuando el conector se dobla y queda frágil cámbialo por uno nuevo, es un incordio si se parte dentro de la protoboard.
- Si se parte un conector dentro de la protoboard, con unas pinzas de punta fina puedes retirarlo.
Canica 14 mm
Nos indica la parte trasera del robot, hace de rueda loca y aporta estabilidad para los giros.

Si vemos que se sale de la pieza impresa, podemos calentar con mucho cuidado la pieza y moldearla un poco para que la canica quede fija.
Juntas tóricas 63x57x3 mm
Se colocan alrededor de las ruedas a modo de cubiertas como en las ruedas de las bicicletas. Aportan agarre y estabilidad para que los movimientos del robot sean más exactos.

Tornillería y tuercas
Sirven para ensamblar los componentes a las piezas impresas en 3D.
Tornillería
Se utilizan 16 tornillos de métrica 3 y 10mm de lóngitud.
Para componentes como la placa botonera o los drivers ULN2003 utilizo tornillos de 5mm (la mitad de cortos) porque facilitan el montaje

También se pueden utilizar tornillos perforantes, el problema de estos es que si desmontas y montas varias veces el mismo robot, dejan de hacer su función. Son más agresivos a la hora de atornillarse en el plástico, si quedan sueltos utiliza uno de los anteriores.

Tuercas
Se utilizan 2 tuercas de métrica 3 para introducir una en cada rueda y así poderlas fijar a los motores.

Guía de montaje
Puedes consultar y descargar la guía de montaje aquí

Instalar programación
No te preocupes si es la primera vez que utilizas Arduino, vamos a ver paso a paso como se instala el programa y se carga la programación en nuestra placa Arduino Nano
Para que sea más agradable, todo el proceso se ha dividido en pequeños hitos:
Descargando IDE Arduino
Primero entramos en la sección descargas de su web:

En la parte derecha tienes que elegir la versión para tu sistema operativo, en este caso he utilizado la versión 1.8.5. Es importante descargar una versión testeada y no una beta que puede darte problemas ala hora de identificar o subir el código.
Después nos sale la página por si queremos hacer una donación al proyecto Arduino o descargar. En la imagen tienes marcada la opción descargar directamente:

Instalando IDE Arduino
Vamos a la carpeta de descargas en nuestro PC y ejecutamos el programa de instalación. Se nos abre la pantalla de instalación, lo primero aceptar las licencias del programa:

En la siguiente pantalla seleccionamos los componentes que queremos instalar (seleccionar todo):

Después seleccionamos la carpeta de nuestro ordenador donde queremos realizar la instalación, es importante apuntar esta dirección porque tarde o temprano necesitaremos entrar en esta carpeta.

Pulsamos instalar y esperamos:

Una vez completada, cerramos la ventana de instalación y en el escritorio tendremos el acceso directo al programa:

Abriendo IDE Arduino
Ya tenemos Arduino instalado en nuestro PC, ahora si pinchamos en el icono creado en el escritorio se abrirá la página principal del programa.

Os dejo un enlace con varias web donde podeis encontrar manuales y tutoriales sobre Arduino para quienes quieran ampliar sus conocimientos.
En este curso aprenderemos lo necesario para que nuestro escornabot funcione.
Descargando la configuración para Escornabot
Rafa Couto es el creador del código y tiene un repositorio con todas las versiones. Utilizaremos para este ejemplo la versión 1.4.3 pero puedes elegir la que quieras.

Descargamos el archivo .zip y lo descomprimimos en nuestro PC, tendremos una carpeta con los siguientes archivos:

En la carpeta "Escornabot" tenemos la configuración que usaremos para cargar en nuestro robot:
Recuerda, debes abrir el archivo "Escornabot.ino"

- Conecta el Arduino Nano al ordenador mediante un cable USB.
- En la pestaña herramientas selecciona como placa "Arduino Nano".
- En la pestaña herramientas selecciona como procesador "Atmega328P".
- En la pestaña herramientas selecciona el puerto del PC al que lo has conectado, en mi caso "COM14". (En puertos según el USB que hayas conectado lo normal es que aparezca COM4, COM5 o COM6) pero podría ser cualquiera COMxx
En las últimas versiones del IDE Arduino hay un cambio que afecta a las placas que utilizamos y debemos seleccionar en procesador; "ATmega328P (Old Bootloader)"
Toda la información en esta entrada

Ya tenemos todo listo para cargar el código.
- Primero le damos al botón de verificar, lo tienes en la parte superior izquierda con un símbolo de una "V", al pulsar se abrirá una ventana para que guardes el proyecto con el nombre que te apetezca:

En la parte inferior nos tiene que aparecer el mensaje en Azul de compilado.

- Con este paso hemos confirmado que el código lo tenemos copiado de manera correcta.
- Ahora vamos a subir el código a nuestra placa, para eso pulsaremos en el botón con forma de flecha que tenemos al lado de verificar:
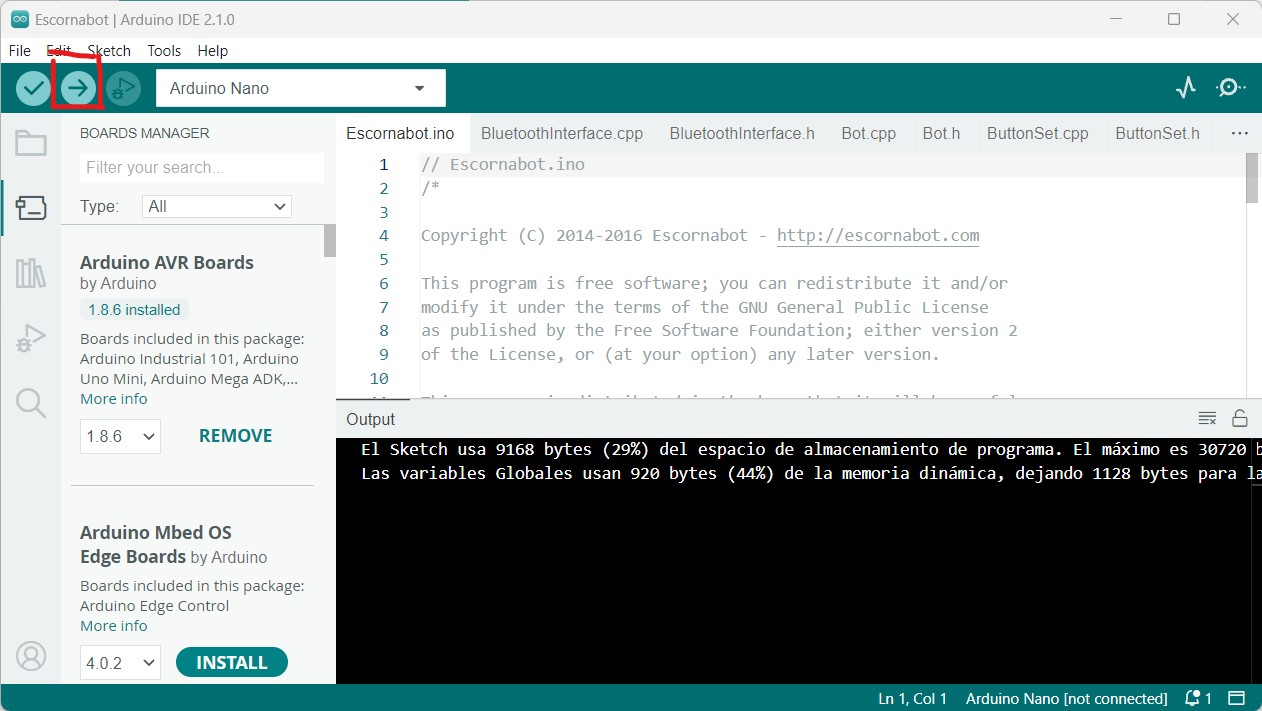
- Si todo ha ido bien en la parte inferior nos tiene que aparecer en azul "Subido" y ningún mensaje de error:

- Ya tenemos el programa cargado, salimos del IDE y vamos a las conexiones USB para desconectar de forma segura el USB. Desconectamos el cable azul y conectamos el cable del portapilas. Ya podemos probar la botonera. Podemos pulsar una secuencia a recorrer con las flechas y se ejecutará cuando pulsamos el botón central.
Solución de problemas en la carga del programa. Usb driver
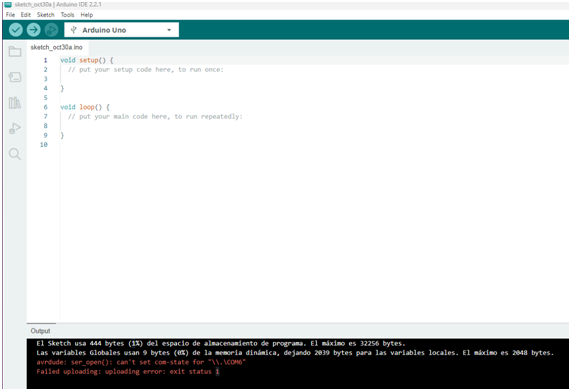
Este paso sólo es necesario realizarlo si no se consigue cargar el programa de escornabot en arduino nano.
Existe un problema con el driver de arduino nano que puede aparecer según el IDE que tengáis, la versión de Windows, etc. Si no aparece no hay acción alguna que tomar, el problema es si al hacer upload del programa a cargar y se ha seleccionado el puerto correcto aparece el siguiente mensaje de error (las letras rojas sobre fondo negro de la parte de abajo de esta imagen). El puerto COMx es un número que varía según el ordenador y puerto usb que se utilice.
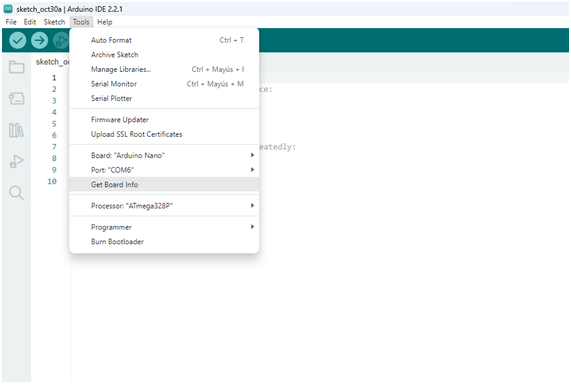
¿Cómo se si he escogido el puerto correcto?? Si he escogido correctamente la placa “arduino nano” y el puerto, escogiendo la opción “get board info” (yo lo tengo en inglés si lo tenéis en castellano es análogo) os debería dar información
Obtendremos un mensaje parecido a este con datos de la placa:
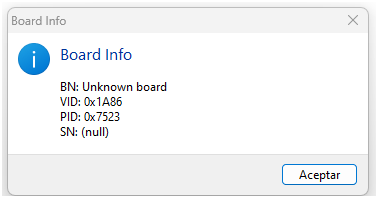
Esto significa que puede leer información por el puerto, que es correcto, pero si obteníamos error del puerto COM al hacer upload debemos cambiar de driver.
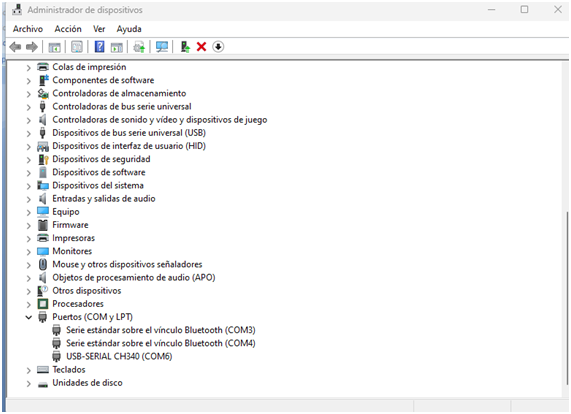
En el menú búsqueda de Windows ir a administrador de dispositivos dentro del panel de control:
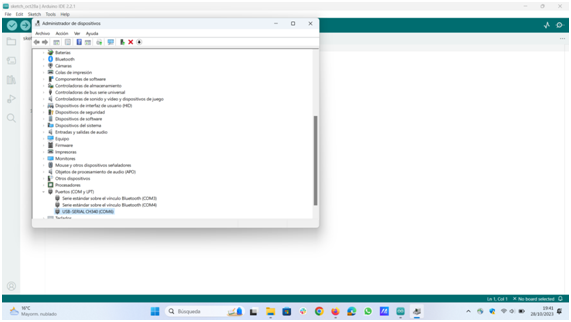
Ir a puertos(COM yLPT), ir al usb-serial 3h340(COMx) y desinstalarlo(botón derecho->desinstalar).
Intalar el archivo descargado de este foro https://forum.arduino.cc/t/no-consigo-cargar-programa-en-arduino-nano/1119429/5
En concreto este enlace: https://cdn.shopify.com/s/files/1/0710/5023/files/CH341SER.EXE?432 , dar doble clic y si hemos desinstalado el anterior driver dejará instalarlo.
OJO, el maravilloso Windows, cada vez que haya una actualización e incluso a veces al volver a arrancar puede cambiar el driver a la versión nueva (la que no funciona) y tendremos que ir de nuevo al administrador de dispositivos -> usb-serial CH340 -> actualizar controladores. Es conveniente pinchar el escornabot siempre en el mismo usb físico del ordenador para que esto pase lo menos posible
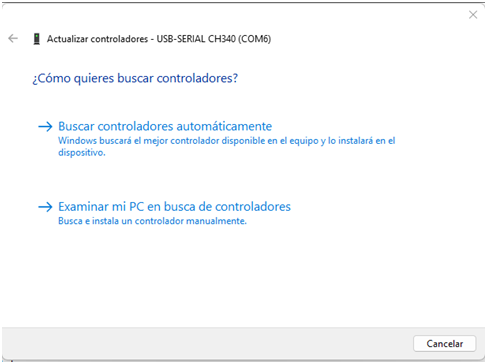
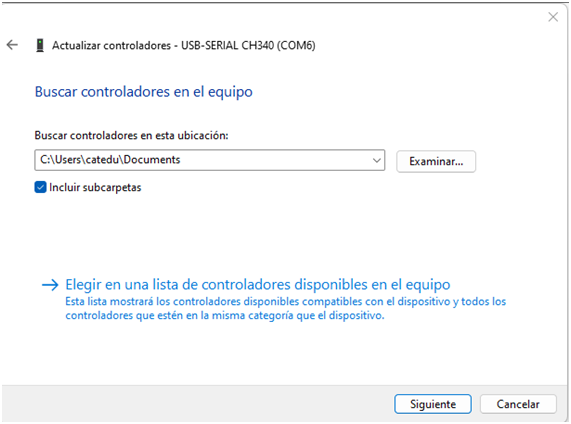
Escogemos examinar mi PC -> elegir una lista de controladores de mi equipo
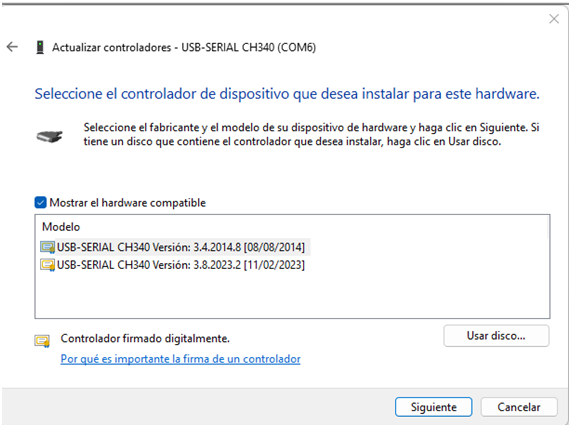
Y de los disponibles el que no falla es el de 2014, lo seleccionamos, damos a siguiente y con esto nuestro problema debería desaparecer
La forma de mirar si está correcto cuando queramos es entrar en el administrador de dispositivos, ir a usb-serial 3h340 de nuevo, botón derecho-> propiedades.
Y obtendremos algo similar a esto en la pestaña controladores
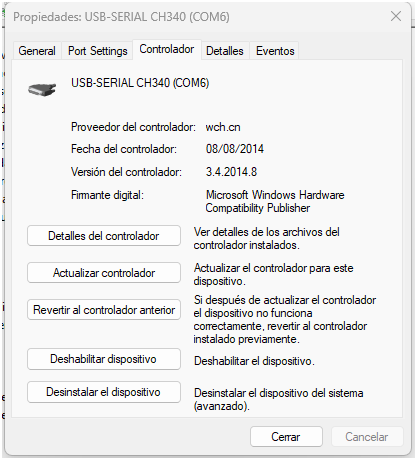
Como se ha dicho antes el puerto COMx puede variar en función de qué puerto se seleccione en vuestro ordenador, conviene pinchar siempre el usb en el mismo puerto para que no cambie la versión del driver.
Modificar programación
Tenemos el robot montado, la programación instalada y todo funciona correctamente.
Las siguientes preguntas que surgen son:
- ¿Cómo hago que vaya más deprisa?
- ¿Cómo modifico la distancia que recorre?
- ¿Cómo modifico los giros?
A pesar de parecer una programación muy compleja, es fácil realizar los cambios en el código y lo vais a ver paso a paso:
Modificar Velocidad
Ya aprendimos en el apartado cambiar los valores de la botonera como entrar en la pestaña "Configuration.h" de la programación.
Abrimos esa pestaña y localizamos la siguiente línea
#define STEPPERS_STEPS_PER_SECOND 1000

Esta línea nos define los pasos por segundo que va a realizar el motor cada vez que pulsemos en el botón de ir adelante o atrás. Si aumentamos el valor, aumentará la velocidad y si disminuimos el valor, disminuye la velocidad.
El límite está en torno a los 2300 steps, dependerá del voltaje de las pilas que el valor sea mayor o menor.
Juego - Dejar que los peques busquen por ellos mismos el límite del valor de los steps de su robot.
Modificar Velocidad de avance
Este apartado además de servir para trabajar medidas, reglas de tres o distancias. Nos permite modificar el avance para jugar en tableros que ya tengamos de otros robots con casillas de 15 cm.
Con la programación abierta y situados en la pestaña "Configuration.h" localizamos la siguiente línea
#define STEPPERS_LINE_STEPS 1738

El valor 1738 equivale a un avance de 10cm cada vez que pulsemos los botones para desplazarnos adelante o atrás.
Realizando una regla de tres simple, podemos ver que el valor de avance de 1cm será de 174 (se redondea el valor porque los decimales no se van a tener en cuenta)
Sabiendo el avance de un centímetroo podemos cambiar el valor para que desplace la distancia que queramos.
Juego - Practicar reglas de tres para que calculen diferentes distancias con marcas en el suelo que deben ir alcanzando.
Modificar Grados de giro
Es el turno de los giros, con la programación abierta y situados en la pestaña "Configuration.h" localizamos la siguiente línea:
#define STEPPERS_TURN_STEPS 1024

Esta línea nos dice cada vez que pulsamos los botones derecha o izquierda, cuantos grados girará Escornabot.
El valor 1024 indica giros de 90 grados.
Al igual que en el apartado anterior, si realizamos una regla de tres simple podemos saber el valor gire de otra manera.
Recordar, en caso de tener decimales hay que redondear.
Por ejemplo, si queremos realizar giros de 45 grados, el valor equivalente será de 512.
Juego - Practicar las horas del reloj variando los ángulos de giro. Pueden jugar por parejas con dos esferas, una para marcar los minutos y otra para marcar los segundos.
Material para trabajar en clase
En este apartado iremos recopilando todas las actividades y materiales de utilidad para trabajar en clase.
Es importante documentar las actividades, compartir y hacerlas accesible para que cualquier persona, en cualquier parte el mundo tenga la posibilidad de acceder a ellas.
Diseños ya hechos
En thingiverse podéis encontrar muchos diseños para descargar e imprimir directamente.
Tableros y fichas
Estos son algunos ejemplos, el material completo y actualizado lo puedes consultar en la sección tableros y recursos de mi página web.
Estamos realizando un recopilatorio con actividades a través de este formulario
Puedes consultar las aportaciones actuales aquí
Tableros
Tableros con actividades
Recopilatorio con tableros y actividades en el repositorio oficial escornabot realizado por Jorge Lobo
Tablero del Sistema Solar
Lo tienes explicado por Jorge Lobo en su blog El Sistema Solar

Tablero casillas blancas y oficial escornabot
El tablero con casillas blancas es muy interesante si le ponemos bolsas tipo zip cortadas en cada casilla y las utilizamos para meter tarjetas personalizadas.
Tienes en la parte inferior las tarjetas con recorridos, recortadas van eligiendo al azar un recorrido.
| Tablero A-3 | Archivo SVG | Archivo PDF |
|---|---|---|
 |
Plantilla cuadrados formato .SVG | Plantilla cuadrados formato .PDF |
 |
Tablero folleto formato .SVG | Tablero folleto formato .PDF |
Tablero números
Puedes jugar tirando un dado y que busquen la casilla, realizando sumas simples... Edita el tablero para complicarlo.
Otro juego divertido son las carreras. Es para dos personas, cada uno con un escornabot y fuera del tablero. Se lanza un dado, como los números se repiten el objetivo es que alcancen la primera casilla que vean.
| Tablero A-3 | Archivo SVG | Archivo PDF |
|---|---|---|
 |
Tablero Números formato .SVG | Tablero Números formato .PDF |
Tablero condicional
Se debe llegar desde la casilla inferior izquierda con el triángulo verde hasta la casilla inferior derecha cumpliendo las condiciones de las casillas. La casilla con el aspa roja no se puede pisar, del mismo modo que la azul ya que se caería al agua.
| Tablero A-3 | Archivo SVG | Archivo PDF |
|---|---|---|
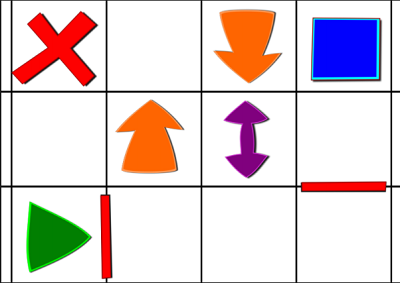 |
Tablero condicional formato .SVG | Tablero condicional formato .PDF |
Tablero figuras geométricas
Se pueden recortar las figuras interiores o cambiar de color para que l@s peques primero hagan la composición del tablero, luego juegan combinando colores y formas geométricas. Puedes crear dos dados, uno contiene colores y otro las formas geométricas.
| Tablero A-3 | Archivo SVG | Archivo PDF |
|---|---|---|
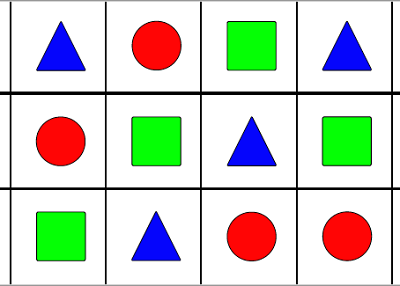 |
Tablero-Cuadrado-Triangulo-Circulo.svg | Tablero-Cuadrado-Triangulo-Circulo.pdf |
Tableros alfabeto
Para trabajar las letras con animalicos :)
| Tablero A-3 | Archivo SVG | Archivo PDF |
|---|---|---|
 |
tablero-alfabeto-a-i.svg | tablero-alfabeto-a-i.pdf |
 |
tablero-alfabeto-j-q.svg | tablero-alfabeto-j-q.pdf |
 |
tablero-alfabeto-r-z.svg | tablero-alfabeto-r-z.pdf |
Tablero triangular
Para usar la plantilla triangular debes cambiar la programación para que los grados en los giros se adapten al dibujo, el robot debe ir por las líneas y llegar a los vértices de los triángulos.
| Tablero A-3 | Archivo SVG | Archivo PDF |
|---|---|---|
 |
Plantilla triangular formato .SVG | Plantilla triangular formato .PDF |
Tablero con papel pintor
Hay que cortar en papel las cuadrículas por donde queremos que se mueva el robot, las pegaremos en papel de pintor y después pintarán un mapa por el que se desplazará Escornabot.

Fichas
| Tarjeta | Archivo |
|---|---|
 |
Tarjetas inicio-fin formato Word |
 |
Tarjetas recorridos formato .PDF |
 |
Tarjetas frutas formato Word |
 |
Tarjetas ecosistemas formato .PDF |
Disfraces
El origen de todo esto viene de @mininacheshire y del blog de Lobotic
Material necesario
- Goma eva
- Tijeras o cuter
- Regla
- Pegamento
- Folios
- Pinturas
- Ojos molones
- Cualquier objeto que resulte útil
Manos a la obra
Un A3 de goma eva mide 30cm de ancho y da de sobra para cubrir el robot de lado a lado. Los 42 cm de largo permite cortar 6 tiras de 7 cm en cada plancha. Yo hago los cortes con cúter, pero si van a trabajar los peques con tijeras mucho mejor 🙂

Disfrazando la versión DIY
Para simplificar usaremos las piezas para fijar el disfraz, en concreto la bola y la placa.


Las propias piezas nos van a servir de plantilla para cortar su silueta. Colocando la tira sobre el robot puedes calcular donde quieres que quede la tira, en mi caso los puse para que se quedara el corte en la parte de la bola:
Cableado
Haremos unos agujeros para pasar los cables de las baterías y los que conectan a la placa.

Buzzer o altavoz
El buzzer o zumbador lo podemos pinchar directamente en la plancha y utilizarlo de nariz. Por la parte trasera se conectan los cables sin problema quedando bastante sujeto.

Ojos
Yo no puedo evitar usar estos ojos pero cada uno debe utilizar su imaginación. Para las cejas he utilizado el mismo cable de arduino haciendo dos agujeros donde anclar los extremos, después puedes darle la forma que quieras.

Boca
Buscando un poco por Internet tienes un montón de imágenes con bocas para imprimir, recortar y pegar.

Cuerpo
Utiliza trozos de goma eva para adornar el cuerpo, folios pintados o cualquier objeto que puedas pegar y quede molón.



Disfrazando la versión 2.12
En este caso hay que tener en cuenta que la placa es rectangular y más grandota. Como en la anterior uso las propias piezas para anclar la goma eva.


Al no tener cables necesitas menos trozo de largo para cubrir el robot entero. Yo he utilizado ese sobrante para fabricarle una colita usando un cable como fijación para poder quitar y poner con facilidad.

Ya tienes una base sobre la que trabajar, ahora imaginación al poder.

Otros ejemplos
En la wiki oficial tienes muchos ejemplos que te pueden dar ideas, te dejo enlace a máscaras Escornabot
Máscaras Impresión 3D
Puedes consultar la colección completa de máscaras en la cuenta Escornabot de Thingiverse
Escornamoji por Programo Ergo Sum

Elefante por Lobotic

león por Lobotic

Mono por Lobotic

Spiderman por Lobotic

Batman por Angel

Robin por Angel

BB-8 por Angel

Mr Escorna Tato por Angel

Treky por Angel

Dados CoDices
Angel ha compartido en su GitHub CoDices, son unos dados modelados en 3D que puedes imprimir para trabajar el pensamiento computacional.

Diseño de ruedas
Lo bonito de este tipo de proyectos, es que se puede iniciar en diferentes campos como el diseño 3D.
Un programa gratuito y de fácil aprendizaje muy recomendable para iniciarse en el diseño 3D es Tinkercad. Puedes consultar esta guía de uso de Of3lia
Si te atreves con algo más complejo, puedes aprender a usar Freecad con Obijuan Tutoriales Freecad I y Tutoriales Freecad II
De vez en cuando, realizamos concursos como el Reto Escorna Rueda. Para que cualquier persona diseñe su propia rueda y la comparta con la comunidad.
Si tienes una impresora 3D, descarga los archivos para imprimir en esta colección de ruedas en la cuenta Thingiverse del proyecto.
 Ruedas de María Loureiro
Ruedas de María Loureiro
Añadir módulo Bluetooth BLE
Guía de referencia, con enlaces al Bluetooth necesario aquí
Material necesario
- 2 cables macho-macho de 10cm
- 4 cables macho-hembra de 10cm
- 1 Bluetooth Ble HM-10 o compatible
- APP Escornabot para Android o IOS
Importante - Esta aplicación funciona solamente con módulos BLUETOOTH BLE, si utilizas un Bluetooth normal como HC-05 o HC-06 lee esta entrada de Lobotic
2 cables macho-macho
Primero necesitaremos los dos cables macho-macho (con pincho en los dos lados) para ampliar los GND disponibles y así poder usar uno para el Bluetooth.
Si tienes dudas sobre el funcionamiento de la protoboard visita de nuevo su apartado en el curso.
Pincharemos el cable rojo encima del rojo y el negro encima del negro de las placas de los drivers.
Puede que en el kit el color de los cables sea diferente. No importa, lo que cuenta es colocar cada cable en su posición. El único motivo de intentar utilizar cableado del mismo color es facilitar el montaje del robot.
Después en las dos filas que tenemos libres pincharemos los otros estremos de las puntas, de este modo tendremos dos filas libres en la parte superior:

- Para conectar el cable del portapilas.
- Para conectar el GND del Bluetooth.
4 Cables macho-hembra de 10cm y 1 módulo Bluetooth BLE HM-10 o compatible
Relación de conexiones entre las patillas del Bluetooth y el Arduino Nano:
| Bluetooth BLE | Arduino NANO |
|---|---|
| RX | TX |
| TX | RX |
| GND | GND |
| VCC | 5V |
Utilizaremos los cables de color negro para GND o negativo y los de color rojo para VIN, VCC, 5V o positivo.
El cable negro lo pinchamos en la patilla GND del Bluetooth y la otra parte encima del negro que hemos ampliado anteriormente.
El cable rojo lo pinchamos en la patilla VCC del Bluetooth y la otra parte encima del cable de corriente 5V del teclado.

Usaremos otros dos cables macho-hembra para conectar las patillas RX, TX del Bluetooth con las del Arduino NANO.
- La patilla RX del Bluetooth la conectamos al TX del Arduino.
- La patilla TX del Bluetooth la conectamos al RX del Arduino.
Cambios y verificaciones en la programación
Entramos en la pestaña "Configuration.h"
Buscamos la parte del código que muestra la imagen:

Dejamos la línea #define BUTTONS_ANALOG para poder utilizar también el teclado
Revisamos si tenemos activada la opción Bluetooth y los baudios a los que enlazará
En la mayoría de los casos funcionan a 9600 baudios que es el valor por defecto que lleva la programación.
Si quieres saber como comprobar los baudios a los que esta programado vuestro módulo visita esta entrada de Makespace Madrid

Si en la pestaña "Configuration.h" no vemos las líneas que aparecen en la imagen las debemos añadir.
Activar línea Serial
Dentro de la pestaña "Configuration.h", al final buscamos este apartado:

Quitamos las dos barras inclinadas de la línea:
//#define BLUETOOTH_SERIAL Serial
Para saber si queda activada, la línea pasa de color gris a negro y la palabra Serial final se pone en amarillo.
Instalación aplicación Escornabot
Descargamos la aplicación gratuita en nuestro móvil o tablet:
Conectar alimentación y vinculación Bluetooth con APP
Ya tenemos todo preparado, lo siguiente:
- Conectamos la alimentación del robot, justo encima de la ampliación que hicimos al inicio. El robot debería dar el pitido del check inicial y el led rojo del Bluetooth comenzar a partadear.
- Entramos en la aplicación, buscamos el dispositivo Bluetooth y nos conectamos, una vez enlazados la luz del Bluetooth dejará de parpadear para quedarse fija.

- Pulsamos en la parte inferior, en el dibujo del círculo con las flechas y pasamos a la pestaña del teclado. Si todo ha ido bien cuando pulsemos cada tecla en nuestro teléfono el robot emitirá un pitido y al pulsar el botón blanco comenzará a caminar.

Ya tenemos nuestro Escornabot con conexión Bluetooth.
Programación con mBlock
Las personas que vayan más avanzadas y necesiten un extra, pueden probar a programar Escornabot con bloques a través de mBlock.
Puedes consultar la guía completa mBlock para escornabot realizada por Angel Villanueva
Pensamiento computacional
¿Dónde se encaja este robot?¿Se puede comparar este robot con otros robots de otros cursos que hacemos desde CATEDU?
Esta es la hoja de ruta, no se tiene que tomar al pie de la letra, pero intenta ayudar al profesorado que tenga una visión global de tanta oferta:
Como se puede ver ESCORNABOT es LA ALTERNATIVA LIBRE a robots tipo Beebot, Colby pero también permite su programación con mBlock y código por lo tanto se puede usar en Infantil programando movimientos con los botones igual que Beebot y Colby o se puede programar utilizando mBlock y código utilizando este robot a niveles superiores, por lo tanto tenemos un robot muy flexible para usarlo en las aulas:
Guía orientativa
Tenemos un grupo Telegram Robótica Educativa en Aragón, https://t.me/roboticaeducativaaragon

Créditos
Autoría
Cualquier observación o detección de error en soporte.catedu.es
Los contenidos se distribuyen bajo licencia Creative Commons tipo BY-NC-SA excepto en los párrafos que se indique lo contrario.


