Programa Arduino Con Mblock (Scratch)
Arduino es una plataforma de electrónica abierta para la creación de prototipos basada en software y hardware flexibles y fáciles de usar. En este capítulo ofrecemos una guía de referencia rápida que…
- Introducción
- El pensamiento computacional
- Robótica y accesibilidad
- 1. Preparando el terreno
- Conoce Arduino
- Hardware del Arduino
- Software del Arduino
- Instalando mBlock
- Dos formas de programar con mBlock
- Preparando mBlock y el Arduino
- Sensores
- Actuadores y otras salidas
- Kit de préstamo de CATEDU Arduino
- Resistencias
- Placa Protoboard
- Pulsadores
- LED
- Condensador
- LDR
- Sensor ultrasonidos
- Métodos para interactuar los objetos y el robot (dispositivo)
- 2. Circuitos sencillos
- 3. Circuitos más complejos
- Ampliación: Sensor parking
- Muro
- Créditos
- Lenguaje de programación
Introducción
Para aprender a programar esta famosa tarjeta microcontroladora, no hace falta saber C++ y lenguajes sofisticados, en este curso proponemos utilizar el lenguaje didáctico de mBlock que es igual al Scratch con unas instrucciones específicas para robótica (bueno, también cambia el gato por un oso panda si nos ponemos meticulosos).
Objetivos
- Conocer las posibilidades didácticas de la placa Arduino
- Pensamiento computacional con el atractivo de la electrónica
- Imaginación y creatividad con la electrónica asociada a Arduino
- Este curso tratamos los conceptos fundamentales para trabajar con el Arduino, empezando desde un nivel muy básico de electrónica con el objetivo de ROMPER EL HIELO en la utilización de esta placa.


El pensamiento computacional
Hay muchas herramientas para trabajar en los niños el lenguaje de las máquinas, pero ¿Cuál elegir? ¿Cuál es el apropiado a qué edad?¿El ARDUINO donde se sitúa? para aclarar un poco hemos elaborado esta hoja de ruta, es orientativa de las herramientas y robots elegidos por Catedu para los cursos, evidentemente hay otros robots y otras herramientas muy válidas, pero no podemos ponerlas todas y complicar el esquema, así que preferimos ser claros que abarcarlo todo:
Guía orientativa
Tenemos un grupo Telegram Robótica Educativa en Aragón, https://t.me/roboticaeducativaaragon

Robótica y accesibilidad
1.- Introducción
Durante mucho tiempo la robótica fue patrimonio de personas y/o instituciones con alta capacidad económica (podían adquirir las placas con microcontroladores comerciales) y capacidad intelectual (podían entender y programar el funcionamiento de las mismas) siempre dentro de los límites establecidos por las marcas comerciales y lo que pudieran “desvelar” de su funcionamiento, vigilando siempre que la competencia no “robara” sus secretos y “copiara” sus soluciones.
Todo esto saltó por los aires en torno a 2005 con la irrupción de un grupo de profesores y estudiantes jóvenes, que decidieron romper con esta dinámica, tratando de poner a disposición de su alumnado microcontroladores económicamente accesibles y que les permitieran conocer su funcionamiento, sus componentes, e incluso replicarlos y mejorarlos. Nacía Arduino y el concepto de Hardware Open Source. Detrás de este concepto se encuentra la accesibilidad universal. En un proyecto Open Source todo el mundo puede venir, ayudar y contribuir, minimizando barreras económicas e intelectuales.
Arduino traslada al hardware un concepto ya muy conocido en el ámbito del software, como es el software open source o software libre.
Software libre
Cuando los desarrolladores de software terminan su creación, tienen múltiples posibilidades de ponerlo a disposición de las personas, y lo hacen con condiciones específicas especificadas en una licencia. Esta licencia es un contrato entre el creador o propietario de un software y la persona que finalmente acabará utilizando este software. Como usuarios, es nuestro deber conocer las condiciones y permisos con las que el autor ha licenciado su producto, para conocer bajo qué condiciones podemos instalar y utilizar cada programa.
Existen muchas posibilidades de licencias: software privativo, comercial, freeware, shareware, etc.. Nos centraremos aquí en la de software libre.
GNU (https://www.gnu.org) es una organización sin ánimo de lucro que puso una primera definición disponible de lo que es software libre: Software libre significa que los usuarios del software tienen libertad (la cuestión no es el precio). Desarrollaron el sistema operativo GNU para que los usuarios pudiesen tener libertad en sus tareas informáticas. Para GNU, el software libre implica que los usuarios tienen las cuatro libertades esenciales:
1. ejecutar el programa.
2. estudiar y modificar el código fuente del programa.
3. redistribuir copias exactas.
4. distribuir versiones modificadas.
En otras palabras, el software libre es un tipo de software que se distribuye bajo una licencia que permite a los usuarios utilizarlo, modificarlo y distribuirlo libremente. Esto significa que los usuarios tienen libertad de ejecutar el software para cualquier propósito, de estudiar cómo funciona el software y de adaptarlo a sus necesidades, de distribuir copias del software a otros usuarios y de mejorar el software y liberar las mejoras al público.
El software libre se basa en el principio de la libertad de uso, y no en el principio de la propiedad. Esto significa que los usuarios tienen la libertad de utilizar el software de la manera que deseen, siempre y cuando no violen las condiciones de la licencia. El software libre es diferente del software propietario, que es el software que se distribuye con restricciones en su uso y modificación. El software propietario suele estar protegido por derechos de autor y solo se puede utilizar bajo los términos y condiciones especificados por el propietario del software.
Recomendamos la visualización de este video para entender mejor el concepto.
Más adelante, entorno a 2015, en Reino Unido, surgiría también la placa BBC Micro:bit, con la misma filosofía de popularizar y hacer accesible en este caso al alumnado de ese país la programación y la robótica. También hablaremos de ella.
2.- ARDUINO o LA ROBÓTICA ACCESIBLE
Arduino es una plataforma de hardware y software libre.
Hardware libre
Esto significa que tanto la placa Arduino como el entorno de desarrollo integrado (IDE) son de código abierto. Arduino permite a los usuarios utilizar, modificar y distribuir tanto el software como el hardware de manera libre y gratuita, siempre y cuando se respeten las condiciones de las licencias correspondientes.
El hardware libre es un tipo de hardware cuya documentación y diseño están disponibles de manera gratuita y libre para su modificación y distribución. Esto permite a los usuarios entender cómo funciona el hardware y adaptarlo a sus necesidades, así como también crear sus propias versiones modificadas del hardware.
Arduino surge como solución al elevado precio de los microcontroladores allá por el año 2005. En el ámbito de la educación, los microcontroladores solo se utilizaban en la etapa universitaria, y su coste era tan elevado que muchos proyectos de fin de carrera se quedaban únicamente en prototipos virtuales ya que las universidades no podían proveer a cada estudiante con un microprocesador, contando además que en el propio proceso de experimentación lo más habitual era que una mala conexión hiciera que se rompieran. Otro gran inconveniente era la dificultad de la programación. Cada fabricante entregaba su manual de programación, lo que hacía que de unos a otros no hubiera un lenguaje estándar, y la consecuente dificultad de interpretación. Además, su programación era a bajo nivel en lenguaje máquina. Generar una simple PWM requería una ardua y minuciosa secuenciación que podía llevar varias horas hasta conseguir el resultado deseado. Por este motivo, el enfoque de Arduino desde el principio fue ser Open Source tanto en hardware como en software. El desarrollo del hardware fue la parte más sencilla. Orientado a educación, sufre algunas modificaciones frente a los microprocesadores existentes para hacer más fácil su manejo y accesibilidad a cualquier sensor o actuador. El mayor esfuerzo se entregó en todas las líneas de código que hacían posible que ya no hubiera que programar a bajo nivel gracias al IDE de Arduino que incluía bibliotecas y librerías que estandarizaban los procesos y hacían tremendamente sencillo su manejo. Ahora el alumnado para mover un motor, ya no tenía que modificar las tramas de bits del procesador una a una, sino que bastaba con decir que quería moverlo en tal dirección, a tal velocidad, o a equis grados.
Acabábamos de pasar de unos costes muy elevados y una programación muy compleja a tener una placa accesible, open source y de bajo coste que además hacía muy accesible su programación y entendimiento, características fundamentales para su implantación en educación, hasta tal punto que su uso ya no era exclusivo de universidades, sino que se extiende a la educación secundaria.
Este hecho es fundamental para el desarrollo del Pensamiento Computacional en el aula observándose que su accesibilidad y beneficios son tales, que alcanzan a centros con alumnado de toda tipología como la aplicación del pensamiento computacional y robótica en aulas con alumnos de necesidades especiales. Una vez más, aparece el concepto de accesibilidad asociado a esta filosofía Open Source.
A este respecto, recomendamos la lectura de este interesante blog, que tiene por título: ROBOTIQUEAMOS...” Experiencia de aproximación a la robótica en Educación Especial (CPEE ÁNGEL RIVIÈRE). También recomendamos los trabajos robótica en Educación Especial (CPEE ÁNGEL RIVIÈRE): http://zaragozacpeeangelriviere.blogspot.com/search/label/ROB%C3%93TICA

Igualmente, la aparición de Arduino supone una gran facilidad para la aplicación de la robótica y la programación en la atención temprana, donde son numerosas sus aplicaciones desde ayudar a mitigar el déficit de atención en jóvenes autistas, hasta ayudar a socializar a los alumnos con dificultades para ello, o ayudar a alumnos de altas capacidades a desarrollar sus ideas.
Por otro lado su accesibilidad económica lo ha llevado a popularizarse en países de todo el mundo, especialmente en aquellos cuyos sistemas educativos no disponen en muchas ocasiones de recursos suficientes, lo que supone en la práctica una democratización del conocimiento y superación de brecha digital.
Filosofía del Arduino ver vídeo
Arduino y su IDE son la primera solución que aparece en educación con todas las ventajas que hemos enumerado, y esto hace que todos los nuevos prototipados y semejantes tengan algo en común, siempre son compatibles con Arduino
Para entender bien la filosofía de Arduino y el hardware libre, os recomendamos este documental de 30 minutos. Arduino the Documentary
Scratch: software libre para el desarrollo del pensamiento computacional
Scratch es un lenguaje de programación visual desarrollado por el grupo Lifelong Kindergarten del MIT Media Lab. Scratch es un software libre. Esto significa que está disponible gratuitamente para todos y que se distribuye bajo una licencia de software libre, la Licencia Pública General de Massachusetts (MIT License). Esta licencia permite a los usuarios utilizar, modificar y distribuir el software de manera libre, siempre y cuando se respeten ciertas condiciones. Entre otras cosas, la licencia de Scratch permite a los usuarios utilizar el software para cualquier propósito, incluyendo fines comerciales. También permite modificar el software y distribuir las modificaciones, siempre y cuando se incluya una copia de la licencia y se indique que el software ha sido modificado. En resumen, Scratch es un software libre que permite a los usuarios utilizar, modificar y distribuir el software de manera libre y gratuita, siempre y cuando se respeten las condiciones de la licencia. De hecho, gracias a que está licenciado de esta forma, han surgido decenas de variaciones de Scratch para todo tipos de propósitos, eso sí, siempre educativos y relacionados con las enseñanzas de programación y robótica
3. BBC micro:bit y la Teoría del Cambio
BBC micro:bit, a veces escrito como Microbit o Micro Bit, es un pequeño ordenador del tamaño de media tarjeta de crédito, creado en 2015 por la BBC con el fin de promover el desarrollo de la robótica y el pensamiento computacional entre la población escolar del Reino Unido. Actualmente su uso está extendido entre 25 millones de escolares de 7 a 16 años de más de 60 países.
 Tarjeta BBC micro:bit V1. Fuente: https://microbit.org. CC BY-SA 4.0.
Tarjeta BBC micro:bit V1. Fuente: https://microbit.org. CC BY-SA 4.0.
Aunque el proyecto fue iniciado por la BBC, su desarrollo fue llevado a cabo por 29 socios tecnológicos de primera línea. Por ejemplo, la implementación del Bluetooth integrado en la tarjeta corrió a cargo de la fundación propietaria de la marca, Bluetooth SIG, una asociación privada sin ánimo de lucro.
El hardware y el software resultantes son 100% abiertos, y están gestionados por una fundación sin ánimo de lucro que comenzó a funcionar en el año 2016, la Micro:bit Educational Foundation. La fundación basa sus actuaciones en su Teoría del Cambio,
Teoría del cambio y más sobre microbit
Teoría del cambio puede resumirse en tres principios:
- El convencimiento de que la capacidad de comprender, participar y trabajar en el mundo digital es de vital importancia para las oportunidades de vida de una persona joven.
- La necesidad de emocionar y atraer a las personas jóvenes por medio de BBC micro:bit, especialmente a las que podrían pensar que la tecnología no es para ellas.
- Diversificar a los estudiantes que eligen las materias STEM a medida que avanzan en la escuela y en sus carreras, para hacer crecer una fuente diversa de talento, impulsando la equidad social y contribuyendo a crear una tecnología mejor.
Para desarrollar sus principios, la fundación trabaja en tres líneas de acción:
- El desarrollo de hardware y software que contribuyan a despertar el entusiasmo en las personas jóvenes hacia la tecnología y hacia las oportunidades que presenta.
- La creación de recursos educativos gratuitos y fáciles de usar que permitan al profesorado enseñar de forma atractiva y creativa.
- La colaboración con entidades asociadas que compartan una misma visión para ofrecer programas educativos de alto impacto en todo el mundo.
Uno de los objetivos de la Micro:bit Educational Foundation es llegar a 100 millones de escolares en todo el mundo.
En correspondencia con las líneas de acción y con los principios expuestos, el sistema resultante es muy económico: tanto las placas como los accesorios producidos por terceras empresas tienen un precio muy contenido. Además, dado el carácter abierto del proyecto, están disponibles algunos clones totalmente compatibles, como Elecrow Mbits o bpi:bit. Estos clones son incluso más potentes y económicos que la placa original.
El universo micro:bit destaca por su alta integración de software y hardware: basta un clic de ratón para cargar las librerías necesarias para que funcione cualquier complemento robótico, como sensores, pantallas, tarjetas de Internet de las Cosas, robots, casas domóticas, etc.
La programación de la placa se realiza desde un ordenador a través de un navegador cualquiera, estando disponibles 12 lenguajes de programación. De nuevo, por ser un sistema abierto, existen múltiples soluciones de programación, aunque las más común es MakeCode.
 Captura de pantalla del editor MakeCode, https://makecode.microbit.org/#.
Captura de pantalla del editor MakeCode, https://makecode.microbit.org/#.
El sitio web MakeCode permite programar con bloques y también en Python y en Java, traduciendo de un lenguaje a otro instantáneamente. No se necesita ningún registro en la plataforma para poder programar.
Los programas también pueden guardarse descargados en el ordenador compilados en código de máquina. Al subir de nuevo el programa al editor, se realiza una decompilación automática al lenguaje de bloques, Python o Java. Los programas guardados en código de máquina se pueden cargar directamente en micro:bit, que en el escritorio de un ordenador se maneja como una simple unidad de memoria USB.
MakeCode contiene además múltiples recursos como tutoriales, vídeos, fichas de programación, cursos para el profesorado, ejemplos y propuestas de proyectos y experimentos, todo ello en varios idiomas y clasificado por edades desde los 7 años.
Otra solución muy usada para programar micro:bit es MicroPython, creada por Python Software Foundation, otra organización sin ánimo de lucro.
MicroCode permite que los más pequeños, a partir de los 6 años de edad, programen micro:bit mediante un sistema de fichas dispuestas en líneas de acción. Están disponibles un tutorial introductorio en 20 idiomas, una guía del usuario y muchos ejemplos. El proyecto es de código abierto.
Micro:bit también es programable en Scratch con sólo añadir una extensión al editor.
Todos los entornos de desarrollo descritos disponen de un simulador de micro:bit, por lo que ni siquiera resulta necesario disponer de una tarjeta física para aprender a programar.
Una vez realizada la programación, la placa y sus complementos pueden funcionar desconectados del ordenador por medio de un cargador de móvil, una batería externa o un simple par de pilas alcalinas.
Versiones y características de micro:bit
A pesar de su pequeño tamaño, micro:bit es un sistema potente. Existen dos versiones de la placa. La más moderna, llamada micro:bit V2, tiene las siguientes características:
- Procesador de 64 MHz.
- 512 KB de RAM Flash y 128 KB de RAM.
- Matriz de 5 x 5 LED rojos.
- Dos pulsadores mecánicos y un tercer pulsador de apagado y reset.
- Un pulsador táctil.
- Micrófono y altavoz.
- Acelerómetro y brújula.
- Sensores de luz y de temperatura.
- Comunicación con otras placas por Bluetooth de bajo consumo.
- Alimentación a 3 V o por USB.
- 25 pines de entradas y salidas para conectar motorcitos, sensores, placas de Intenet de las Cosas, robots y, en general, cualquier otro tipo de accesorio.
- 200 mA de intensidad de corriente disponibles en las salidas para alimentar accesorios.
4.- LA IMPORTANCIA DEL OPEN SOURCE / CÓDIGO ABIERTO EN EDUCACIÓN
La creación, distribución, modificación y redistribución del hardware y software libre así como su utilización, están asociados a una serie de valores que deberían ser explicados en la escuela a nuestros alumnos para dar una alternativa a la versión mercantilista de que cualquier creación es creada para obtener beneficios económicos.
En GNU, pusieron especial énfasis en la difusión del software libre en colegios y universidades, promoviendo una serie de valores fundacionales:
Valores GNU
Compartir
El código fuente y los métodos del hardware y software libre son parte del conocimiento humano. Al contrario, el hardware software privativo es conocimiento secreto y restringido. El código abierto no es simplemente un asunto técnico, es un asunto ético, social y político. Es una cuestión de derechos humanos que la personas usuarias deben tener. La libertad y la cooperación son valores esenciales del código abierto. El sistema GNU pone en práctica estos valores y el principio del compartir, pues compartir es bueno y útil para el progreso de la humanidad. Las escuelas deben enseñar el valor de compartir dando ejemplo. El hardware y software libre favorece la educación pues permite compartir conocimientos y herramientas.
Responsabilidad social
La informática, electrónica, robótica... han pasado a ser una parte esencial de la vida diaria. La tecnología digital está transformando la sociedad muy rápidamente y las escuelas ejercen una influencia decisiva en el futuro de la sociedad. Su misión es preparar al alumnado para que participen en una sociedad digital libre, mediante la enseñanza de habilidades que les permitan tomar el control de sus propias vidas con facilidad. El hardware y el software no debería estar bajo el poder de un desarrollador que toma decisiones unilaterales que nadie más puede cambiar.
Independencia
Las escuelas tienen la responsabilidad ética de enseñar la fortaleza, no la dependencia de un único producto o de una poderosa empresa en particular. Además, al elegir hardware y software libre, la misma escuela gana independencia de cualquier interés comercial y evita permanecer cautiva de un único proveedor. Las licencias de hardware y software libre no expiran
Aprendizaje
Con el open source los estudiantes tienen la libertad de examinar cómo funcionan los dispositivos y programas y aprender cómo adaptarlos si fuera necesario. Con el software libre se aprende también la ética del desarrollo de software y la práctica profesional.
Ahorro
Esta es una ventaja obvia que percibirán inmediatamente muchos administradores de instituciones educativas, pero se trata de un beneficio marginal. El punto principal de este aspecto es que, por estar autorizadas a distribuir copias de los programas a bajo costo o gratuitamente, las escuelas pueden realmente ayudar a las familias que se encuentran en dificultad económica, con lo cual promueven la equidad y la igualdad de oportunidades de aprendizaje entre los estudiantes, y contribuyen de forma decisiva a ser una escuela inclusiva.
Calidad
Estable, seguro y fácilmente instalable, el software libre ofrece una amplia gama de soluciones para la educación.
Para saber más
En los años 90, era realmente complicado utilizar un sistema operativo Linux y la mayoría de la cuota del mercado de los ordenadores personales estaba dominada por Windows. Encontrar drivers de Linux para el hardware que tenía tu equipo era casi una quimera dado que las principales compañías de hardware y de software no se molestaban en crear software para este sistema operativo, puesto que alimentaba la independencia de los usuarios con respecto a ellas mismas.
Afortunadamente, y gracias a la creciente presión de su comunidad de usuarios, estas situaciones pertenecen al pasado, y las compañías fabricantes de hardware han tenido que variar el rumbo. Hoy en día tenemos una gran cantidad de argumentos en los que nos podemos basar para dar el salto hacia cualquier sistema operativo basado en Linux. Tal y como podemos leer en educacionit.com, podemos encontrar las siguientes ventajas:
- Es seguro y respeta la privacidad de los usuarios: Aunque hay compañías linuxeras, como Oracle, Novell, Canonical, Red Hat o SUSE, el grueso de distribuciones y software Linux está mantenido por usuarios y colectivos sin ánimo de lucro. De esta forma, podemos confiar en que una comunidad que tiene detrás millones de usuarios, pueda validar el código fuente de cualquier de estas distribuciones, asegurándonos la calidad de las mismas, compartir posibles problemas de seguridad, y sobre todo, estar bien tranquilos con la privacidad y seguridad de nuestros datos e información personal, aspecto que debería ser crítico y determinante a la hora de trabajar con los datos de menores de edad en las escuelas y colegios.
- Es ético y socialmente responsable: La naturaleza de Linux y su filosofía de código abierto y libre hace posible que cualquier usuario con conocimientos pueda crear su propia distribución basada en otras o probar las decenas de versiones que nos podemos encontrar de una distribución Linux. Este es el caso de Ubuntu por ejemplo. Gracias a esta democratización de los sistemas operativos, incluso han podido aparecer en nuestras vidas nuevos dispositivos basados en software y hardware libre como Arduino y Raspberry Pi.
- Es personalizable: el código abierto permite su estudio, modificación y adaptación a las necesidades de los diferentes usuarios, teniendo así no un único producto sino una multiplicidad de distribuciones que satisfacen las necesidades de los diferentes colectivos a los que se dirijan. Especialmente útiles son las distribuciones educativas libres, que pueden ser adaptadas a las necesidades de las escuelas.
- Está basado en las necesidades de los usuarios y no en las de los creadores de hardware y software
- Es gratis. La mayoría de las distribuciones Linux son gratuitas y de libre descarga
- Es fácil de usar. Una de las barreras que durante años ha evitado a muchos usar Linux es su complejidad. Las distribuciones orientadas al consumo doméstico cumplen los estándares de simplicidad y necesidades que cualquier usuario sin conocimientos de tecnología pueda necesitar. El entorno gráfico es sencillo, intuitivo, e incluso se puede customizar para que se pueda parecer a los más conocidos como Windows y MacOS. Además, vienen con la mayoría de aplicaciones que cualquier usuario puede necesitar: ofimáticas, edición de audio y vídeo y navegación por Internet.
- Es suficiente. Tiene su propio market de aplicaciones. Como el resto de sistemas operativos ya sea para ordenadores o dispositivos móviles, también podemos encontrar un lugar único donde poder descargar cientos de aplicaciones para todos los gustos y necesidades.
Por estas razones, el software libre se ha expandido por toda la comunidad educativa en los últimos años de manera exponencial. Un buen ejemplo de lo que estamos hablando es Bookstack, este sistema de edición de contenidos para cursos que utiliza Aularagón así como el uso de Moodle como plataforma de enseñanza y aprendizaje. En cuanto a sistema operativo para ordenadores, en Aragón disponemos de nuestra propia distribución Linux: Vitalinux EDU. Tal y como podemos leer desde su página web: Vitalinux EDU (DGA) es la distribución Linux elegida por el Gobierno de Aragón para los centros educativos. Está basada en Vitalinux, que se define como un proyecto para llevar el Software Libre a personas y organizaciones facilitando al máximo su instalación, uso y mantenimiento. En concreto Vitalinux EDU (DGA) es una distribución Ubuntu (Lubuntu) personalizada para Educación, "tuneada" por los requisitos y necesidades de los propios usuarios de los centros y adaptada de forma personalizada a cada centro y a la que se ha añadido una aplicación cliente Migasfree. De ésta forma, obtenemos:
- Un Sistema Ligero. Permite "revivir" equipos obsoletos y "volar" en equipos modernos. Esto garantiza la sostenibilidad de un sistema que no consume recursos de hardware innecesariamente ni obliga a la sustitución del hardware cada poco tiempo en esa espiral de obsolescencia programada en la que se ha convertido el mercado tecnológico.
- Facilidad en la instalación y el uso del sistema mediante programas personalizados.
- Un Sistema que se adapta al centro y/o a cada aula o espacio, y no un centro que se adapta a un Sistema Operativo.
- Gestión de equipo y del software de manera remota y desatendida mediante un servidor Migasfree.
- Inventario de todo el hardware y software del equipo de una forma muy cómoda.
- Soporte y apoyo de una comunidad que crea, comparte e innova constantemente.
1. Preparando el terreno
Conoce Arduino
¿Qué es Arduino?
Arduino es una tarjeta electrónica que integra básicamente a un microcontrolador y un conjunto de pines de conexión de entradas y salidas que permiten, mediante un determinado programa, interaccionar con el medio físico mediante sensores y actuadores electrónicos. De esta forma podrás crear tus propios proyectos tecnológicos, dotarlos de sensores que detecten magnitudes físicas como luz, calor, fuerza, etc… y en base a esa información, escribiendo un programa, activar otros dispositivos (actuadores) como pequeñas bombillas, ledes, servomotores, pequeños motores DC, relés, etc… Los sensores se conectan a los pines de entrada y los actuadores a los de salida.
¿Sabías que.... ? Uno de los co-creadores de Arduino es Español, de Zaragoza: David Cuartielles +info
¿Qué es un microcontrolador?
Es un circuito integrado que se puede programar, o sea que puede ejecutar las órdenes que tenga almacenadas en su memoria. Tiene las tres funciones principales de un computador: la unidad central de proceso, memoria y entradas y salidas.
Arduino utiliza la marca ATMEL, y el modelo de microcontrolador depende del tipo de tarjeta, por ejemplo la tarjeta Arduino Uno utiliza el micro ATMEL MEGA 328P. Si quieres saber las entrañas de esta placa aquí
¿Qué se puede hacer con Arduino? ¿Algún ejemplo?
Realmente el límite lo marca tu imaginación pero por dar alguna pista, podrías diseñar un sistema para la apertura y cierre de la puerta de un garaje, hacer un robot móvil que detecte objetos o que siga una línea negra, crear un detector de luz y oscuridad, implementar un termómetro, controlar un cilindro neumático, etc…
En este manual tienes múltiples ejemplos de pequeños proyectos para el aula, aunque Arduino es una herramienta que también se utiliza en el ámbito profesional para monitorización de sensores y automatización a pequeña escala por su flexibilidad, fiabilidad y precio.
¿Qué son las entradas y salidas?
Mediante los conectores de Arduino correspondientes a las entradas y salidas podemos comunicar nuestros programas con el “mundo exterior”. Si queremos leer el valor de la magnitud física medida por un sensor, por ejemplo una LDR que detecta el nivel de luminosidad, lo tendremos que hacer conectando el sensor a uno de los pines de entrada (en este caso analógicas) de la tarjeta.
De esta forma con una simple instrucción de lectura en el programa, podremos obtener el valor de la magnitud física. Si nuestra intención es actuar o “hacer algo” una vez leído el valor del sensor, por ejemplo encender un led si el sensor de luminosidad detecta oscuridad, tendremos que conectar el actuador (en este caso el led) a un pin de salida que proporcionará la corriente necesaria para activarlo.
En Arduino las entradas pueden ser analógicas o digitales y las salidas sólo digitales. Cada pin digital tiene doble función entrada o salida. En la zona de configuración del programa hay que indicar explícitamente mediante una instrucción cuál es función desempeña un determinado pin.
¿Dónde se conectan los sensores? ¿A las entradas analógicas o digitales?
La mayoría de sensores miden señales analógicas y proporcionan una variación de voltaje dentro de un rango (normalmente de 0 a +5V) dependiendo de lo que varíe la magnitud física medida. Muchos sensores son resistivos a algo (luz, temperatura, humedad,…), es decir que varían su resistencia eléctrica con la magnitud física, pero mediante un sencillo montaje de divisor de tensión conseguimos una variación de voltaje apta para Arduino. Estos montajes los veremos en las prácticas.
Veamos este ejemplo:
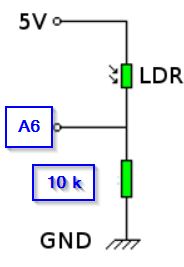
El sensor LDR es una resistencia que cambia según la intensidad de la luz. La estrategia es colocar el LDR en un divisor de tensión con otra resistencia de valor parecido al promedio del que da el LDR (por ej 10k), y el valor del punto de unión proporciona una tensión entre 0 y 5V. Como es una señal analógica, la conectamos a una entrada analógica (en la figura al A6)
Una vez realizadas las conexiones, si midieramos la salida del sensor con un voltímetro nos daría un valor decimal, por ejemplo un nivel de luz “intermedio” (rango de 0 a 5V) de un sensor de luz podría dar 3,3 voltios. Este tipo de información el microcontrolador no la entiende tal cual, sólo es capaz de interpretar números binarios (“0” ó “1”) por lo que para traducir los valores analógicos dispone internamente de un conversor analógico – digital que hará la conversión entre los dos sistemas, de forma que podremos tener valores discretos de la medida de los sensores analógicos. En el Arduino las entradas analógicas leen valores analógicos entre 0V y la alimentación (normalmente 5V) y los convierten en números entre 0 y 1023 (porque lo codifica en 10 dígitos binarios proporcionan 210 = 1024 combinaciones).
Por ejemplo, si la entrada analógica lee un valor de 3,3V y la fuente de alimentación es 5V, la señal analógica que lee Arduino, haciendo una regla de 3, tiene un valor de 3,3 * 1023 / 5 = 675,18 = 675
Mapeo
Para convertir estos valores 0 -1023 a valores más legibles, por ejemplo 0 - 100 para representarlo en % o 0-5 para que represente la medida en voltios ... veremos en programación la función mapear
La mayoría de los sensores nos lo venden ya preparados montados en una pequeña placa electrónica y con circuitos integrados auxiliares para no tener que estar haciendo divisores de tensión. Pueden tener salida analógica o salida digital, que en este caso lo tenemos que conectar a cualquier entrada digital D0 hasta D13.
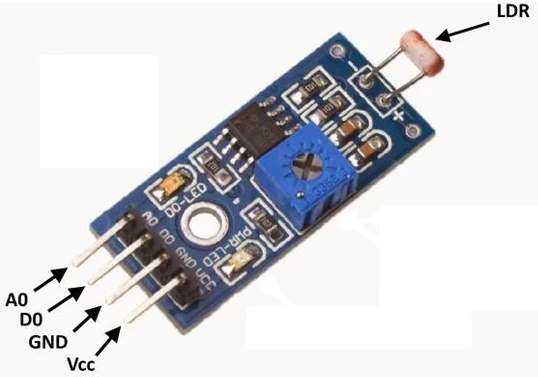
Veamos el mismo ejemplo del LDR: Podemos comprar este módulo:

Estos módulos proporcionan 3 pines: dos que son la alimentación, (0V, GND o - ) y (+5V V+o Vcc) y el pin que proporciona la lectura (Vout o D0 o I/O). En el caso de que sea un sensor que mida una magnitud analógica como en este caso la luz, suelen proporcionar un potenciómetro para determinar qué luminosidad se considera un 0 o un 1.
¿Hay sensores digitales que no estén en una placa electrónica?
Las entradas digitales sin una placa electrónica son cuando las señales a leer son valores discretos. Por ejemplo queremos poner un pulsador o un interruptor que encienda un led. Hacemos un montaje que cuando se pulse, entren 5 voltios en el pin digital de entrada y cuando no se pulse que “entren” 0 voltios. De esta manera la lectura del pin digital de entrada será “HIGH” con 5 voltios o “LOW” con 0 voltios.
Veremos más adelante que un interruptor no es un simple cable que conectamos a +5V o a 0V pues ¿Qué valor lee Arduino mientras levantamos el cable de un sitio a otro?, para ello veremos configuraciones Pull-up o Pull-down que se repiten en muchos sensores.
¿Qué son las salidas digitales etiquetadas con PWM (~)?
Son salidas digitales que simulan una salida analógica. Las siglas significan Modulación por Ancho de Pulso (Pulse Width Modulation) es decir, proporcionan una onda cuadrada con un nivel alto (+5V) de “cierta” duración.
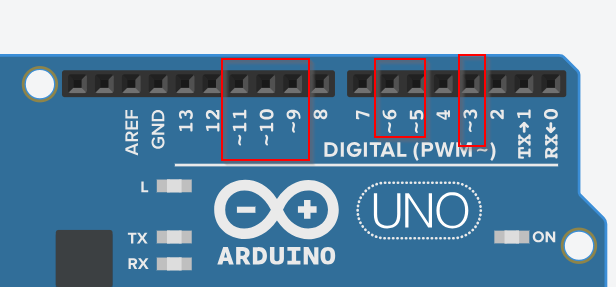
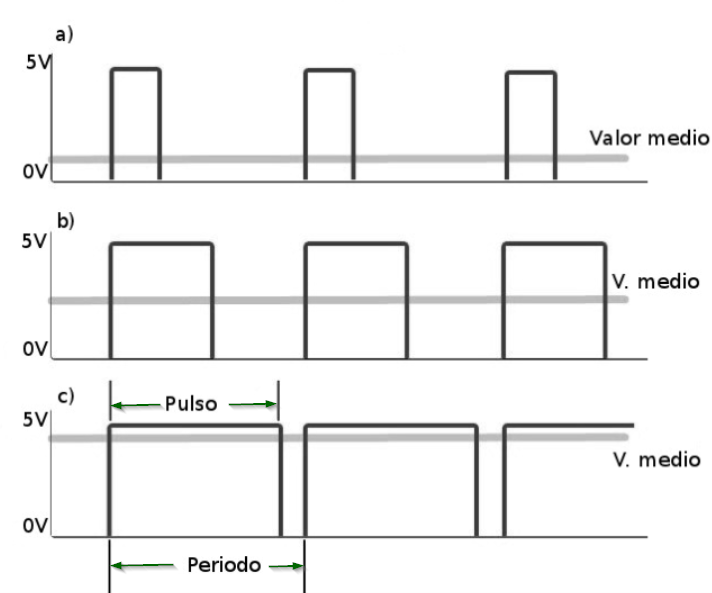
Los valores PWM que podemos proporcionar pueden ir desde 0 a 255.
- Un valor bajo es una señal cuadrada donde el pulso es pequeño comparado con el periodo (ver figura primera señal) por lo tanto el Valor medio es bajo.
- Un valor mitad, es decir 255/2 = 127 o 128, corresponde a una señal cuadrada perfecta (ver figura segunda señal) por lo que el Valor medio es la mitad, si 5V es la tensión de alimentación, sería 2,5V.
- Un valor alto es una señal cuadrada donde el pulso es grande comparado con el periodo (ver figura la tercera señal) por lo tanto el Valor medio es alto
- Un valor 0 corresponde a un 0V analógico y sería una señal sin pulso
- Un valor 255 corresponde a la máxima tensión (la de alimentación (normalmente 5V).
- La frecuencia es de 490Hz para los pines 3, 9, 10, 11 y de 980Hz para los pines 5 y 6 en un Arduino UNO o Nano
De esta manera podemos simular señales analógicas, esto es muy útil para activar servomotores y llevarlos a una posición determinada o variar la luminosidad de un led o en los motores de los robots que vayan más deprisa o más despacio
¿Puedo accionar motores DC con Arduino?
Si son motores muy, muy pequeños sí sería posible aunque no es recomendable, pueden dañar la placa. Los motores necesitan un consumo alto de corriente, sobre todo si tienen que mover cierta carga, por lo que se recomienda o bien utilizar una tarjeta Shield o extensión de Arduino que dispone de circuitería apta para proporcionar dicha corriente (transistores).
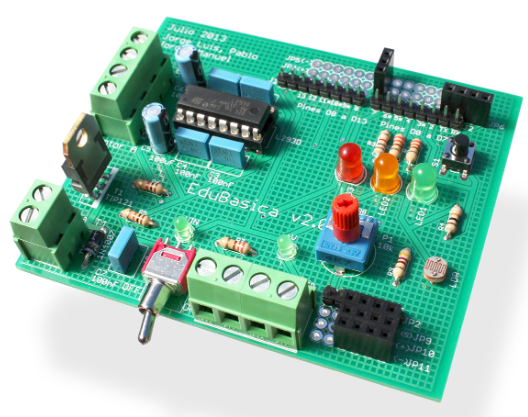
- En el curso Arduino con código utiliza una Shield llamada Edubásica que dispone de un transistor y un circuito integrado LM293 para realizar esta función, además de otras ventajas para el aprendizaje de Arduino.
- En el curso Rover con Arduino utiliza Shield motor para NodeMCU
Hardware del Arduino
Placa Arduino
Arduino puede tomar información del entorno a través de sus pines de entrada de toda una gama de sensores y puede afectar aquello que le rodea controlando luces, motores y otros actuadores.
Arduino UNO R3 by GmedranoTIC on Sketchfab

Entradas y salidas
La placa Arduino UNO consta de:
- DIGITALES:
- 14 entradas/salidas digitales D0-D13 previamente hay que configurarlas o entradas o salidas. Que operan a 5 ó 0 voltios. Cada pin puede proporcionar o recibir como máximo 40 mA.
- Los pines D0 y D1 son compartidos por el puerto USB por lo tanto no se pueden utilizar si se está comunicando con el ordenador, están marcados como TX/RX (transmisión y recepción puerto serie).
- 14 entradas/salidas digitales D0-D13 previamente hay que configurarlas o entradas o salidas. Que operan a 5 ó 0 voltios. Cada pin puede proporcionar o recibir como máximo 40 mA.
- ANALOGICAS
- 6 entradas analógicas A0 al A5 con una resolución de 10 bits que proporcionan un número entero de 0 a 1023. Por defecto miden de 0 voltios (masa) hasta 5 voltios.
- 6 salidas pseudo-analógicas, en los pines digitales 3, 5, 6, 8, 10 y 11 son PWM (Pulse Width Modulation) y como hemos visto, pueden proporcionar una salida cuadrada que su valor medio puede estar entre 0 y 5V
La intensidad de corriente que pueden proporcionar como salida son 20mA.
Pines de la placa
Elementos con los que podemos interactuar: (tomando como ejemplo la placa USB). Empezando en el sentido de las agujas del reloj desde el centro de la parte superior:

- Pin de referencia analógica (naranja).
- Señal de tierra digital (verde claro).
- Pines digitales 2-13 (verde).
- Pines digitales 0-1 / entrada y salida del puerto serie: TX/RX (azul) (estándar de comunicación serie IC2).
- Botón de reset (negro).
- Entrada del circuito del programador serie (marrón).
- Pines de entrada analógica 0-5 (azul oscuro).
- Pines de alimentación y tierra (naranja y naranja claro).
- Entrada de la fuente de alimentación externa (9-12V DC)
- X1 (gris). - Entrada fuente de alimentación externa
- SV1: En las placas antiguas existen estos pines para conmutar si la alimentación es por el puerto USB, ahora lo realiza automáticamente un transistor MOSFET
- Puerto USB (rojo).
Las placas: Arduino Diecimila, Arduino Duemilanove o UNO y Arduino Mega están basados en los microcontroladores Atmega168, Atmega 328 y Atmega1280 respectivamente. Trabajan a 16MHz, una velocidad suficiente para proyectos de robótica. Su capacidad de memoria Flash van desde 16k el Atmega168 hasta 128k Atmega1280, suficientes para que quepan nuestros programas de robótica.
SHIELDS para Arduino
Las llamadas Shields (escudos) para Arduino son tarjetas que se acoplan a la placa Arduino y añaden funciones y potencialidad a la placa Arduino. Según mi criterio hay dos tipos de Shields: Las educativas y las no educativas
Shields educativas
Hay muchas Shields Educativas, vamos a ver unos pocos ejemplos
- La shield del curso Arduino con código EDUBASICA, que integra algunos sensores y actuadores, pero lo que destaca es que además tiene la opción de conexión de motores o actuadores que requieran potencia, pues la placa Arduino por sí sola no puede proporcionar la suficiente intensidad para alimentar motores, relés o electroválvulas. El límite de intensidad que proporciona cada una de las salidas digitales es de 40 mA. Para poder activar estos dispositivos tendremos que montar un circuito externo adicional con transistores o circuitos integrados específicos para motores, como es el caso del LM293, que entregan la intensidad suficiente. Para facilitarnos la tarea esta placa integra un LM293 y un transistor de potencia, en total 5 salidas de potencia.
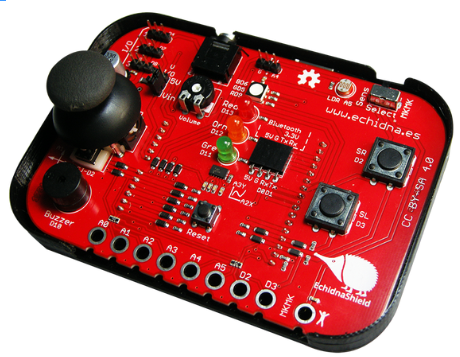
- La shield del curso ECHIDNA que tiene integrados sensores y actuadores como el acelerómetro, sensor de luz, pulsadores, potenciómetro, altavoz... y destaca el Joystick con la posibilidades de gamificación que se puede hacer con este elemento. También destaca el modo MAKEY que permite convertir los pines analógicos y los digitales D2 D3 en pines sensibles al tacto, con las mismas posibilidades que la placa MAKEY MAKEY (ver curso Makey Makey). Actualmente Echidna ya no fabrica esta Shield sino comercializa la ECHIDNA BLACK que no es una shield sino es autónoma (es decir, NO necesita la placa Arduino, la tiene integrada)
.
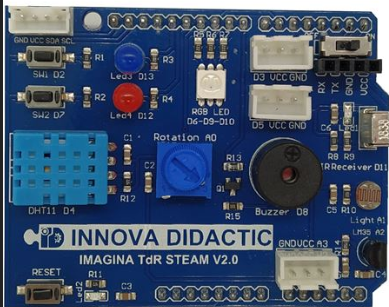
- La shield del curso ARDUINO EN EL AULA, la TDR-STEAM que tiene muchas posibilidades didácticas por su sensores (temperatura, humedad, luz, potenciometro, pulsador, receptor IR).
- La Shield k5864195 muy sencilla y barata, si lo que se busca son sensores sencillos (pulsadores, potenciómetro) y actuadores sencillos (altavoz, leds y display 7 segmentos).

- Shield Protoboard que simplemente tiene una placa para hacer los prototipos. Por ejemplo Curso de Domótica con Arduino


Shields no educativas
Es difícil elegir unos ejemplos de toda la variedad comercial que existe y tanta vitalidad de versiones (ver lista), preferimos que en caso de que necesites alguna función extra a tu Arduino, busques en ese momento cual es la mejor Shield que se adapta a tu proyecto. Es importante que sepas que existen Shields para todo, por ejemplo para...
- Agregar conectividad al Arduino, ya sea por red móvil (3G, 4G), por Wifi, Bluetooth o por cable Ethernet o incluso localización GPS.
- Agregar potencia a las salidas para conectar por ejemplo motores, como el de Edubásica pero más especializado en esta función y con más salidas pero por ejemplo la L293D ⨤7€ permite 4 motores, motor paso a paso, servo....
- Shields con relés para conectar sensores y actuadores con tensión y así no tienes problemas de quemar el Arduino.
- Shields con batería que en el caso de corte de alimentación, permiten que el Arduino no se apague.
- Entrada y salida de imagen con pantalla líquida y cámara
Y encima se pueden apilar !! consiguiendo aumentar la capacidad de tu Arduino tanto como necesites (sin pasarte, pues pues alimentación del Arduino es limitada al menos que la Shield tenga su propia alimentación.
Alimentación eléctrica de Arduino
Uno de los aspectos claves para el buen funcionamiento de proyectos con Arduino, es que no incluyan elementos que consuman una intensidad superior a 200 mA como motores, relés, electroválvulas, etc.. Si los incluyen, entonces todo falla, debido a que no se ha alimentado correctamente la placa.
Tenemos dos posibilidades para alimentar Arduino:

A .- Mediante el cable USB conectado al ordenador:
- Cada pin proporciona 40 mA.
- El límite proporcionado por el USB es de 500 mA en total.
Si conectamos demasiada carga, la placa Arduino suele tener un comportamiento anómalo pudiéndose resetear el micro.
B .- Utilizando una fuente de alimentación externa conectada al Jack de Arduino (fuente de voltaje, adaptador de corriente, batería o portapilas) :
- El voltaje recomendado de la fuente externa está entre 7 y 12V.
- Tiene un diodo de protección para proteger la placa de cambio de polaridad accidental.
- La intensidad máxima que puede entregar Arduino a los actuadores que queramos controlar (servos, motores, relés,...) es de 1A, aunque una exposición prolongada a esta corriente puede estropear la placa. Lo recomendable son 500 mA.
- El pin serigrafiado con Vin proporciona directamente el voltaje de la fuente conectada al Jack de Arduino (menos la caída de tensión del diodo de protección) Desde ese pin podemos sacar un cable y alimentar a los actuadores que necesitemos. Por ejemplo, si alimentamos con una pila externa de 9V conectada al jack, en el pin Vin tendremos aproximadamente 9V (hay que restar la caída de tensión del diodo de protección que será de medio voltio). Además en los pines 5V y 3.3V dispondremos también de dichos voltajes aunque la fuente externa sea de 9V.
C.- No recomendable: Conectando el positivo (+Vcc) de la fuente externa a Vin y el negativo a GND:
Podemos alimentar Arduino externamente si necesidad de conector Jack a través de Vin y GND el problema es que nos saltamos un diodo de protección que evita que se queme el circuito por un exceso de corriente.
CONCLUSIÓN:
- Si necesitamos hacer funcionar actuadores de bajo consumo (luces, zumbadores, etc...) podremos trabajar directamente con el USB conectado al ordenador o conectado a un PowerBank.
- Si necesitamos mover cargas, excitar bobinas u otros elementos de mayor consumo lo recomendable es alimentar externamente Arduino desde el Jack con un rango de 9 a 12V.
Si vas a utilizar elementos que requieran más de 800mA tienes que usar la alimentación externa del Jack y alimentar esos elementos por el pin Vin del Arduino.
Si esos elementos van a ser alimentados de forma independiente. ES IMPORTANTE UNIR LAS MASAS, En caso contrario, romperás la placa Arduino.
En este ejemplo se ha conectado el motor a una tensión externa (la pila) y la placa Arduino al USB fíjate como se han unido las masas
Opcionalmente se ha optado por unir el + de la pila con Vin. Eso equivale a conectar la pila al Jack. Esto hace que si quitamos la alimentación USB, la placa Arduino sigue alimentada.
Es recomendable unir la fuente externa (pila) al jack y no como se muestra, pues así tienes un diodo de protección que te protege la placa Arduino en el caso de que cambies la polaridad de la pila de forma accidental. ¿Porqué en este circuito no se ha hecho así? Porque en Tinkercad no he encontrado un Jack.
Software del Arduino
Las placas electrónicas educativas (Echidna, Micro:bit, Arduino, ESP32 ...) se programan mediante varias opciones :
OPCIÓN LENGUAJE GRÁFICO POR BLOQUES
Recomendado para primaria. Tenemos muchas posibilidades de lenguajes gráficos. Destacamos dos:
- ECHIDNASCRATCH
- Específico para Echidna e integra la IA CURSO DE ECHIDNA
- MBLOCK Basado en Scratch. Aunque es un programa especializado en el robot comercial mBot, (basado en Arduino), el mismo programa está adaptado para programar Arduino.
- CURSO ARDUINO CON MBLOCK se utiliza Arduino y placa Protoboard
- CURSO DE ECHIDNA se utiliza la Shield Echidnam y EchidnaBlack
- CURSO DE MBOT se utiliza el robot mBot
- CURSO ARDUINO CON MBLOCK se utiliza Arduino y placa Protoboard
- STEAMAKERBLOCKS (antes ARDUINOBLOCKS) se trabaja online, muy visual y muy amigable. Está adaptado tanto para trabajar tanto Arduino como muchas placas controladoras y en el aula. Podemos verlo en los siguientes cursos:
- CURSO ROVER CON ARDUINO aunque no se utiliza un Arduino, sino un NodeMCU pero la programación es exactamente igual
- CURSO DE ARDUINO CON ARDUINOBLOCKS donde se utiliza el Arduino con una placa protoboard
- CURSO ARDUINOBLOCKS EN EL AULA donde se utiliza la Shield TDR-STEAM
- CURSO ESP32 EN EL AULA donde también utiliza la Shiedl TDR Steam pero la placa no es un Arduino, sino ESP32, la programación es exactamente igual.
- Microbloks https://microblocks.fun/ placas: Arduino, Microbit, ESP32, RaspberryPico, .... ver minitutorial
Otros softwares para programar con bloques
- Snap4Arduino https://snap4arduino.rocks/run/ Online, libre... ver compartiva vs mBlock
- S4A https://s4a.cat/
EN VIVO ¿Qué es eso?
Existe una posibilidad de utilizar la placa "en vivo" frente a "cargar" el programa en la placa.
Es decir, interactuando con el ordenador. El programa está en el PC. En la placa hay un firmware que le dice que este a las órdenes del PC. De esta manera podemos por ejemplo:
- Enviar órdenes desde el ordenador a la placa.
Por ejemplo que al pulsar la tecla espacio que se encienda el led D13
- Enviar información desde la placa al ordenador
Por ejemplo que muestre por pantalla nos muestre la cantidad de luz, que registra el sensor LDR, etc...
Que nosotros sepamos, estos programas permiten la programación en vivo :
- mBlock placas: Arduino, Microbit, Raspberry Pi, ... robots de Makeblock: mBot, Cyberpi...
-EchidnaScratch CURSO DE ECHIDNA
-Microblocks
VENTAJAS LA PROGRAMACIÓN EN VIVO PERMITE MUCHO JUEGO Y POSIBILIDADES A LA HORA DE ELABORAR PROYECTOS
INCONVENIENTES: Necesitas el ordenador encendido y conectado al robot.
TAMBIÉN ES EN VIVO PERO ....
Hay otros softwares que técnicamente trabajan en vivo, es decir, que el programa se ejecuta desde el ordenador, no se ejecuta en la placa, son :
- Snap4Arduino para placas Arduino
- Picobriks blocks para Picobrick board
Pero no permiten trabajar utilizando los elementos del ordenador (teclado, webcam, pantalla, sprite o objetos,,,)
Es importante que entiendas que para trabajar en vivo, la placa tiene que tener cargado un "firmware" para que interactúe con el ordenador.
P: ¿Qué es eso de "firmware"?
R: No es más que un software que se graba en los chips de la placa.
P ¿Y por qué se llama así, y no se llama software o programa y en paz?
R: Digamos que como se graba en los chips, es un medio camino entre software y hardware, para diferenciarlo del software habitual.
EN CARGA ¿Qué es eso?
Simplemente el programa que estas haciendo se carga en la placa
VENTAJAS: Eres independiente del ordenador, tu robot funciona independiente
DESVENTAJAS Pierdes todas las posibilidades de utilizar los recursos de un ordenador, teclado, pantalla, webcam, altavoces...
Es importante que si cargas tu programa en la placa, pierdes lo que había antes
Es decir, si quieres volver a trabajar EN VIVO tienes que cargar el firmware correspondiente.
OPCIÓN LENGUAJE POR CÓDIGO
Recomendable a partir de secundaria.
LENGUAJE POR CÓDIGO ARDUINO IDE
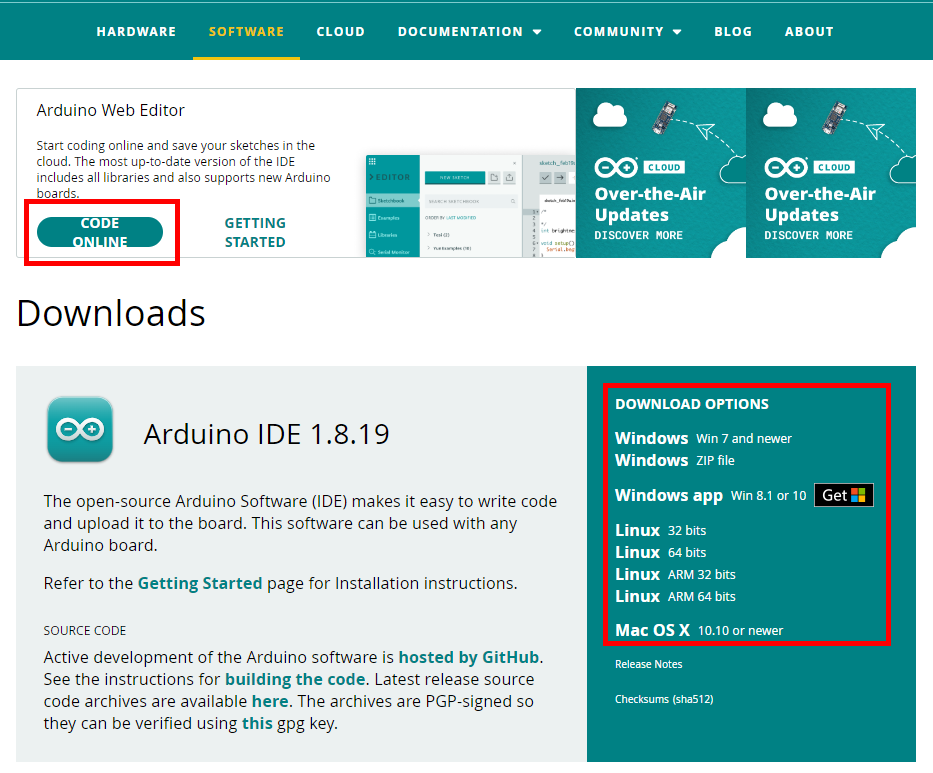
Es un lenguaje basado en Wiring y permite la programación del Arduino en un entorno de desarrollo (basado en Processing). El programa se llama ARDUINO IDE y se puede descargar desde la página oficial de Arduino: https://www.arduino.cc/en/software.
Hay otra posibilidad que es utilizarlo online, con la ventaja de tener tus proyectos "en la nube" y no depender del equipo. OJO, TIENES QUE TENER INSTALADO EL SOFTWARE CREATE AGENT
https://create.arduino.cc/getting-started/plugin/welcome
En los cursos de CATEDU se ha utilizado el lenguaje por código empezando desde cero en:
- CURSO ARDUINO CON CÓDIGO donde se trabaja con el Arduino y con diferentes sensores y actuadores, con o sin placa Shield Edubásica.
- CURSO DE DOMOTICA CON ARDUINO donde se realiza una maqueta de una casa controlada con domótica. También el curso ofrece la versión de hacer la misma maqueta utilizando lenguaje gráfico por bloques.
Recomendamos estas hojas resumen si vas a trabajar con código:
- En Español: enlaceDrive, enlaceGithub
- En Inglés: enlaceDrive, enlaceGithub, enlaceSpakrfun
LENGUAJE POR CÓDIGO PYTHON
Es un lenguaje más amigable que ArduinoIDE y tiene muchos campos de aplicación aparte de la robótica
- Arduino tiene su propia versión para trabajar con sus placas compatibles: Arduino Lab for Micropython
- Un compilador universal Thonny
VENTAJAS E INCONVENIENTES
LENGUAJE GRÁFICO POR BLOQUES vs CÓDIGO
El lenguaje gráfico por bloques es un lenguaje sencillo de utilizar, nos evita tener en cuenta muchas librerías y cálculos.
Otra ventaja, es que el lenguaje por bloques es el único que permite programación "en vivo"
Por ejemplo, la instrucción leer valor distancia el sensor ultrasonidos, mediante programación por bloques es

mientras que en código es
double distancia;
double fnc_ultrasonic_distance(int _t, int _e){
unsigned long dur=0;
digitalWrite(_t, LOW);
delayMicroseconds(5);
digitalWrite(_t, HIGH);
delayMicroseconds(10);
digitalWrite(_t, LOW);
dur = pulseIn(_e, HIGH, 18000);
// devuelve cuanto tarda el pulso alto en microseg; 18000 es el tiempo a esperar limite
if(dur==0)return 999.0;
return (dur/57);
// la velocidad del sonido es 344m/s = 34400 cm/seg = 0,0344 cm/microseg
// como v=e/t luego e = v*t y como cuenta la ida y la vuelta distancia = v*t/2
// luego distancia = 0,0344/2 * dur = dur/57
}
void setup()
{
pinMode(6, OUTPUT);
pinMode(5, INPUT);
}
void loop()
{
distancia = fnc_ultrasonic_distance(6,5);
}Como se puede ver en código, tiene que calcular la distancia haciendo cálculos del tiempo de rebote del eco, mientras que el gráfico es sumamente sencillo y se centra en el objetivo del algoritmo a crear, no en lo accesorio. Esto hace que un lenguaje gráfico por bloques se puede aplicar desde los 8 años.
Por otra parte, el lenguaje código tiene todo el potencial, es decir, no todo está en los lenguajes gráficos. Si se quiere cosas más avanzadas, hay que recurrir al código.
Un lenguaje gráfico se convierte en lenguaje código, pero al revés no se puede, debido a que el código es más depurado y no tiene la información necesaria para volver a su origen en bloques, ya lo has visto con el anterior ejemplo, el código tiene más información.
¿No te lo crees? Haz la prueba, métete en https://www.tinkercad.com/ crea un programa con bloques, dale a la pestaña de código y te aparecerá una advertencia que perderás el programa con bloques ! no puedes volver atrás!
Curiosamente, tiene una opción bloques+código que traduce cada bloque con un código, es decir, traduce cada bloque sin perder información, sólo de esa manera se puede pasar de bloques a código y viceversa.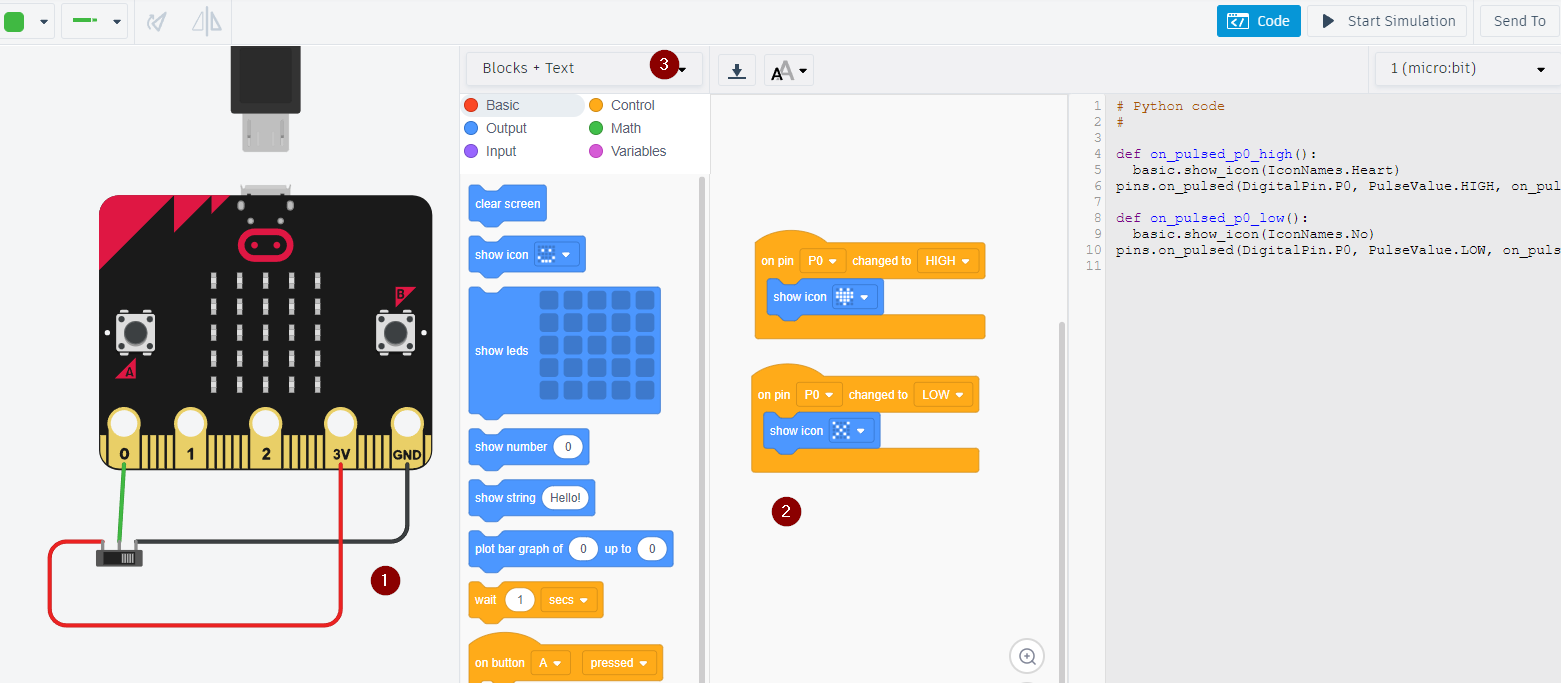
Hay herramientas para pasar de bloques a código pero no al revés

Imagen Federico Coca Notas sobre ESP32 STEAMakers CC-BY-SA
El lenguaje código se traduce en lenguaje máquina (ceros y unos) entendible para el microprocesador, pero al revés no se puede.
En este vídeo, en mi opinión se olvida de mBlock, Snap4Arduino, S4A pero puedes ver un vistazo de los diferentes editores
OPCIÓN SIMULACIÓN
Incluimos dentro del apartado de Software los diferentes programas que hay para simular placas electrónicas como Arduino, ESP32, Micro:bit etc...
Tinkercad
Esta herramienta https://www.tinkercad.com aparece en el Curso Arduino con código en la práctica Comunicación entre dos Arduinos, pero también es una plataforma que sirve para hacer los diseños de elementos 3D, ver curso Impresión 3D con Tinkercad
Tiene la ventaja que es aplicación online, muy visual y buscan un reflejo de la práctica real, además de estar la herramienta adaptada al aula (gestión de alumnos y proyectos). Como desventajas podemos decir que no tiene mucha variedad de componentes electrónicos y la simulación es algo lenta.
Además permite embeber, pruébalo !!! 😍😍😍 Pulsa Iniciar simulación y luego pulsa el botón A de cualquiera de los dos micro:bits
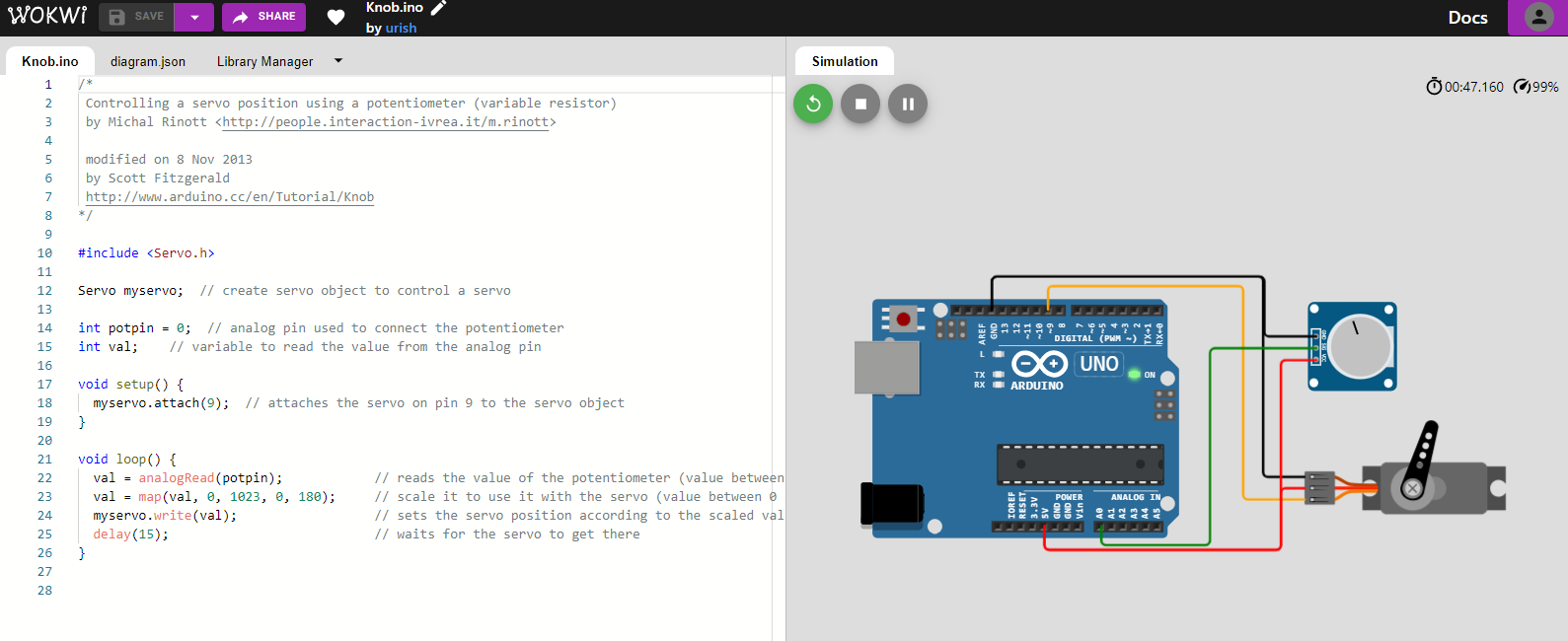
Wokwi
Si Tinkercad se queda corto, puedes probar esta plataforma https://wokwi.com/ con muchas posibilidades. Es online y puede trabajar con multitud de placas: ArduinoUno, ESP32, Raspberry,,,,
Como única desventaja que encontramos, es que echamos de menos la realidad de Tinkercad, por ejemplo no puedes poner una placa protoboard para realizar las conexiones, pero a cambio se gana simplicidad de cableado.
UnoArduSim
Es una aplicación local. UnoArduSim además es una aplicación portable fácil de instalar y con los elementos de leds, motores servos ya preparados, ideal para ejemplos sencillos y para examinar señales y no depender de Internet, pero no es tan versátil.
SIMULIDE
En https://simulide.com/ podemos encontrar un programa local de software libre genérico para electrónica, incluido Arduino. En esta captura se puede ver uno de los ejemplos que incorpora el programa: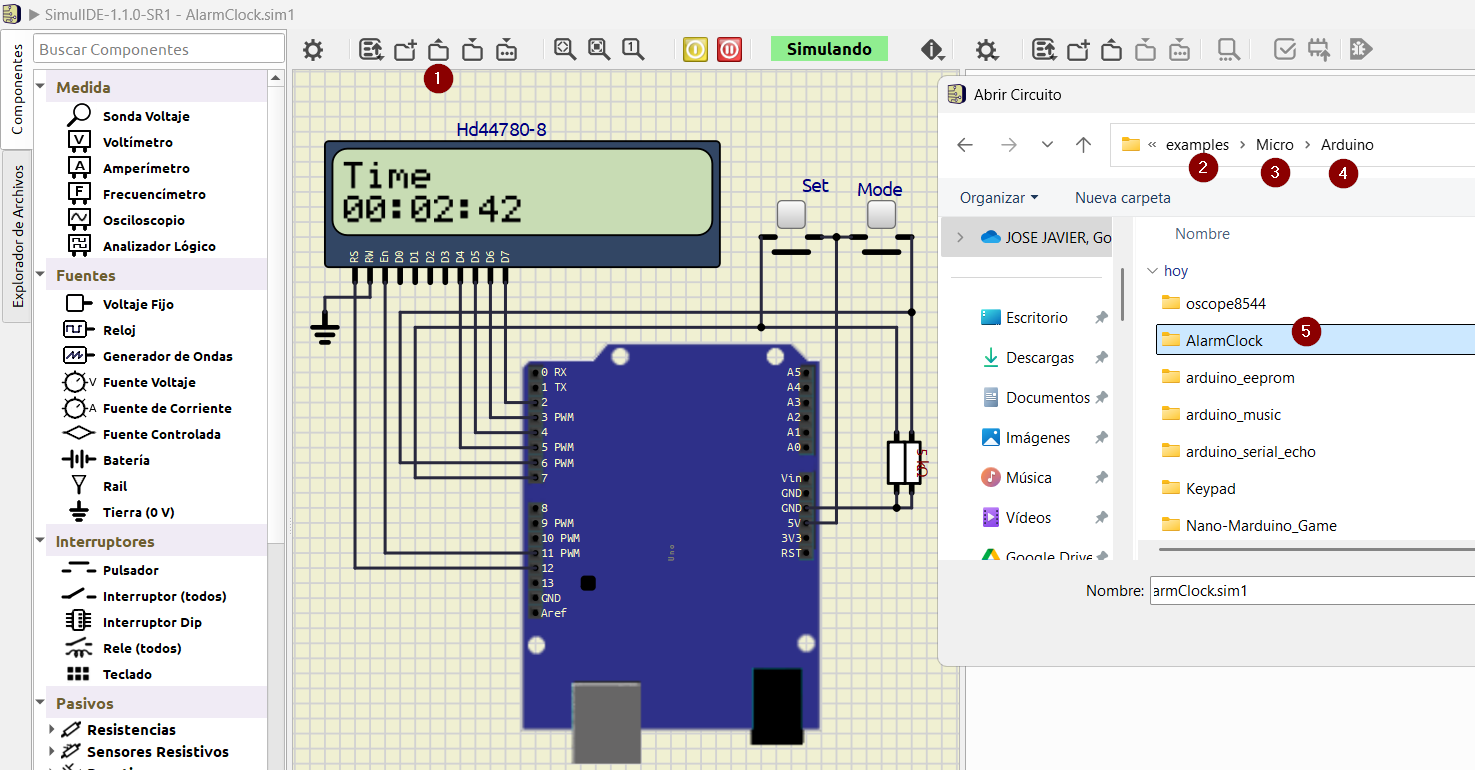
OPCIÓN SÓLO DIBUJAR
- TinkerCad es un buen programa para dibujar los planos
- ➕permite también la simulación
- ➕ permite embeber y compartir
- ➖ no tiene muchos componentes
- SimulIDE es software libre. Es un programa portable.
- ➕ Tiene muchos componentes
- ➕permite también la simulación
- ➖ le faltan algunos sensores, pero van incorporando
- Fritzing es un clásico. Es un programa portable.
- ➕ Tiene muchos componentes
- ➖ no es gratis, hay que pagar 8€
- Circuit canvas
- ➕ puede compartir por ejemplo
- ➕ tiene buenos tutoriales sobre electrónica
- ➖ todo en inglés
- ➕ puede compartir por ejemplo
Instalando mBlock
mBlock es un programa especializado en el manejo de los robots de Makeblock (ver cursos de mBot en Aularagon), pero permiten muchas arquitecturas de placas pues los mismos robots de Makeblock estan basados en placas de hardware libre Arduino, ESP32...

Hay dos versiones, online y offline, las dos son buenas, no obstante
- Si tienes Windows o Mac preferimos la versión offline para no saturar la red en los centros, rapidez y comodidad.
- Si utilizas Linux o Chromebook tienes que usar la versión online obligatoriamente pues no hay versión instalable.
Tanto una opción como la otra, permite tener los proyectos en la nube de Makeblock, compartir, embeberlos, etc...
Versión online
Para la versión web primero hay que instalar mLink driver nos vamos a https://mblock.cc/pages/downloads y abajo nos encontramos mLink para descargar, descarga el mLink correspondiente a tu sistema operativo :
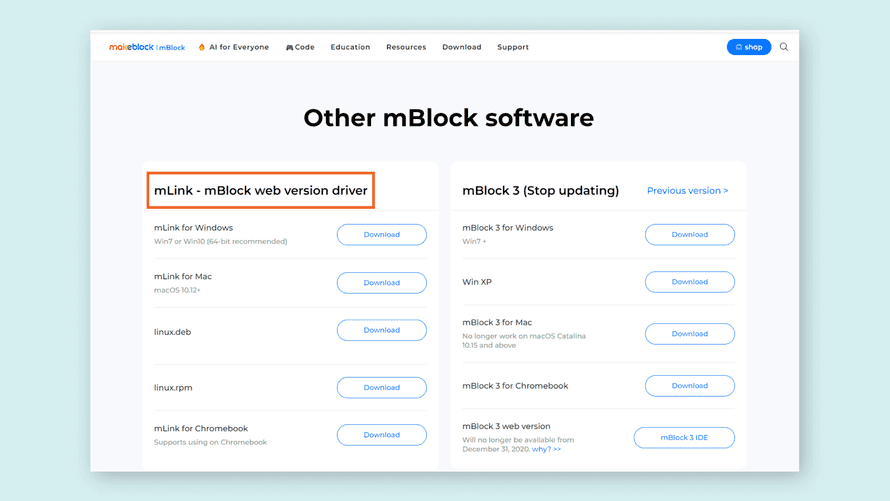
Licencia CC-BY -SA https://docs.arduino.cc/tutorials/alvik/getting-started-mblock/
Lo instalamos, y entonces pedirá instalar los drivers que son pequeños programas que comunican el PC con el harware del robot
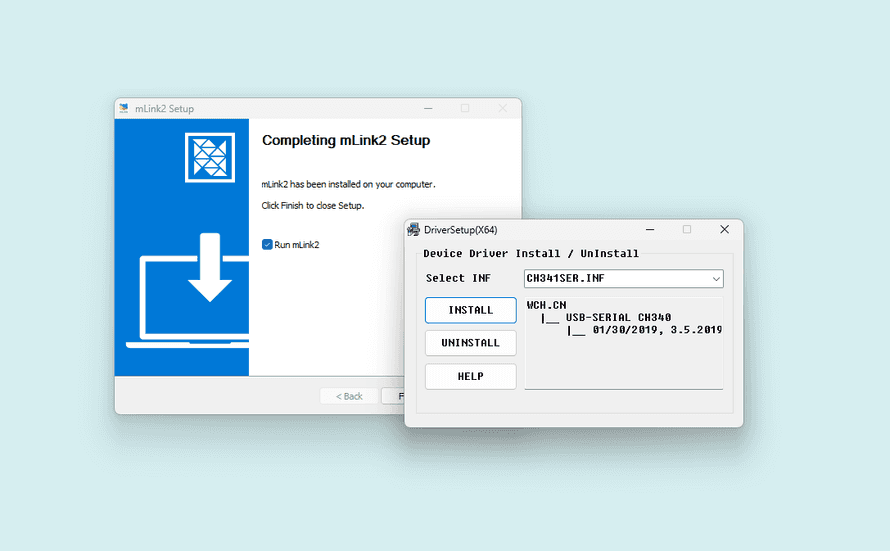
Licencia CC-BY -SA https://docs.arduino.cc/tutorials/alvik/getting-started-mblock/
Si utilizas Chromebook lee la siguiente guía para conectar el robot
Una vez instalado ya podemos entrar en la web https://ide.mblock.cc/ para programar en bloques nuestro robot
Nota: La página https://ide.mblock.cc/ no suele estar bien situada en los buscadores si ponemos mBlock, la página que suele salir es esta https://www.mblock.cc/en/ y nos da dos opciones, trabajar con bloque, o con Python, elegimos bloques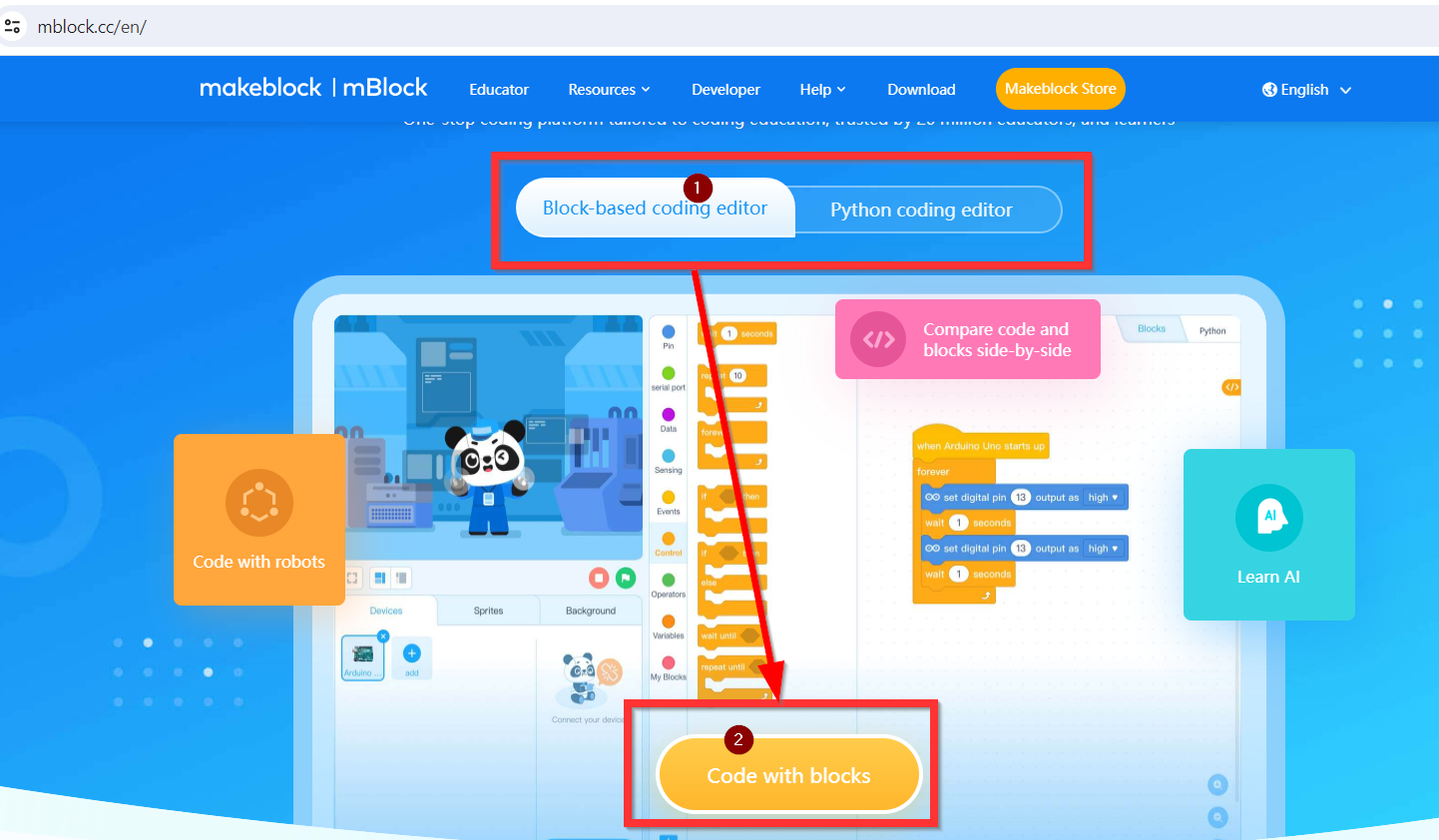
Si has entrado sin querer en la URL https://ide.makeblock.com/ no permite el logueo en Europa
En resumen, la URL correcta es https://ide.mblock.cc/
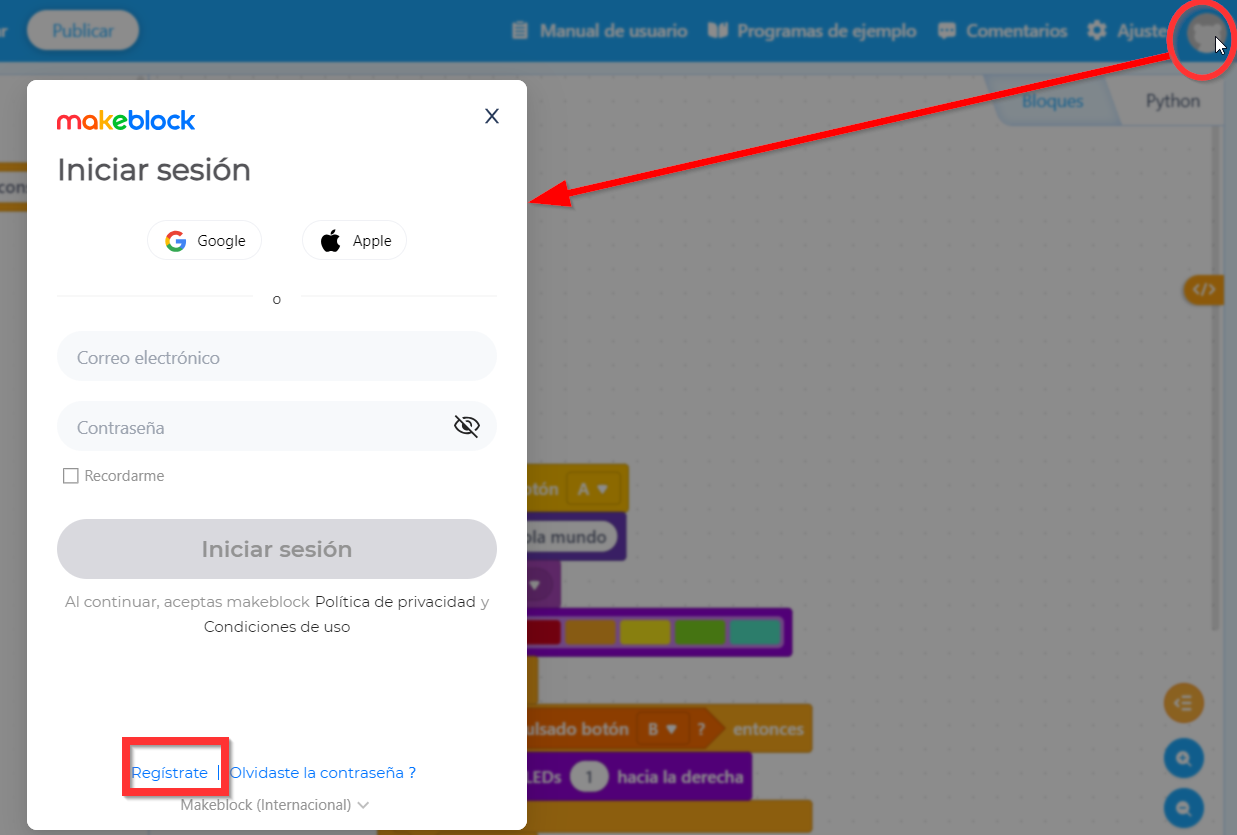
En este editor tenemos que loguearnos podemos crear un nuevo usuario, utilizando una cuenta de Google/Apple o registrarnos con un correo electrónico
Versión offline Windows o Mac
Vamos a https://mblock.cc/pages/downloads y descargamos la versión correcta a nuestro sistema operativo.
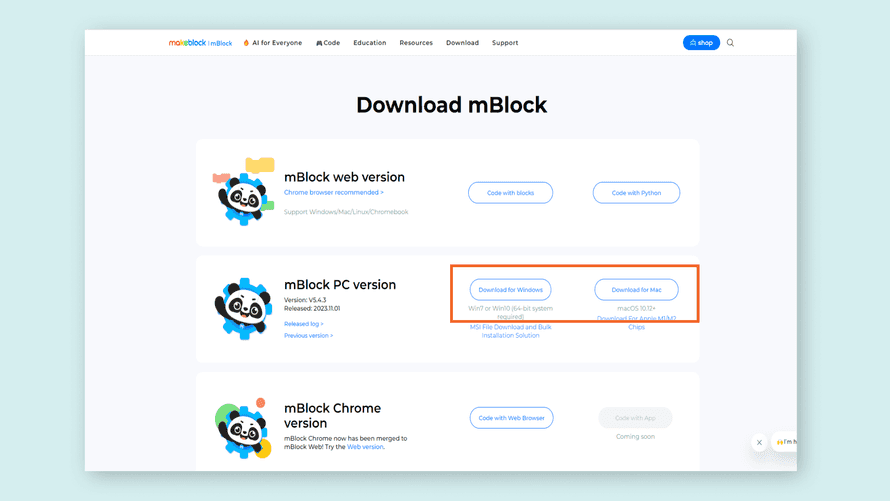
Licencia CC-BY -SA https://docs.arduino.cc/tutorials/alvik/getting-started-mblock/
En windows hacemos doble click en el archivo ejecutable descargado
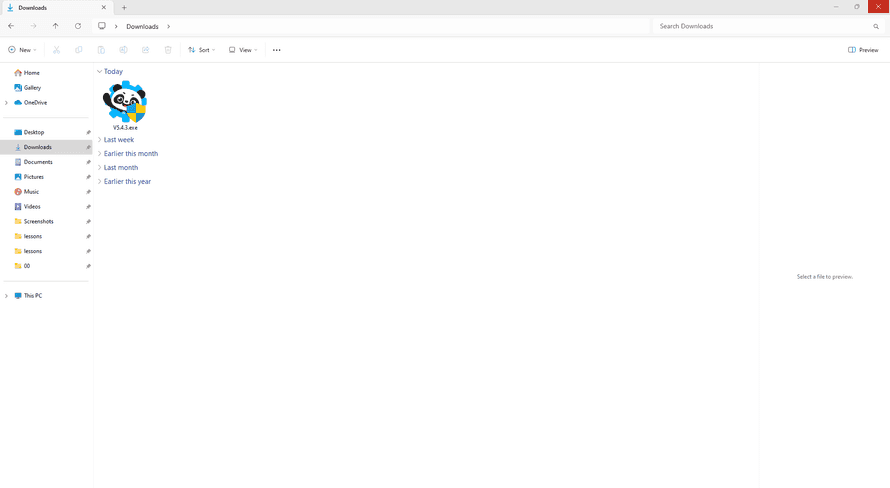
Licencia CC-BY -SA https://docs.arduino.cc/tutorials/alvik/getting-started-mblock/
Lo instalamos, y entonces pedirá instalar los drivers que son pequeños programas que comunican el PC con el hardware del robot
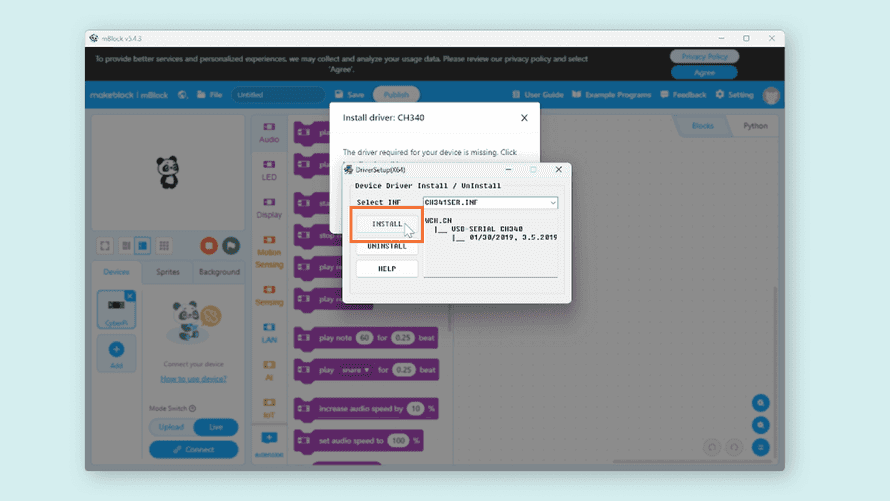
Licencia CC-BY -SA https://docs.arduino.cc/tutorials/alvik/getting-started-mblock/
Algunas veces la ventana de driver de la figura anterior esta escondida en el fondo, hay que minimizar ventanas para acceder a ella.
En MAC el archivo será un fichero mount con la extensión .dmg, por lo tanto hay que arrastar el icono a la carpeta de aplicaciones
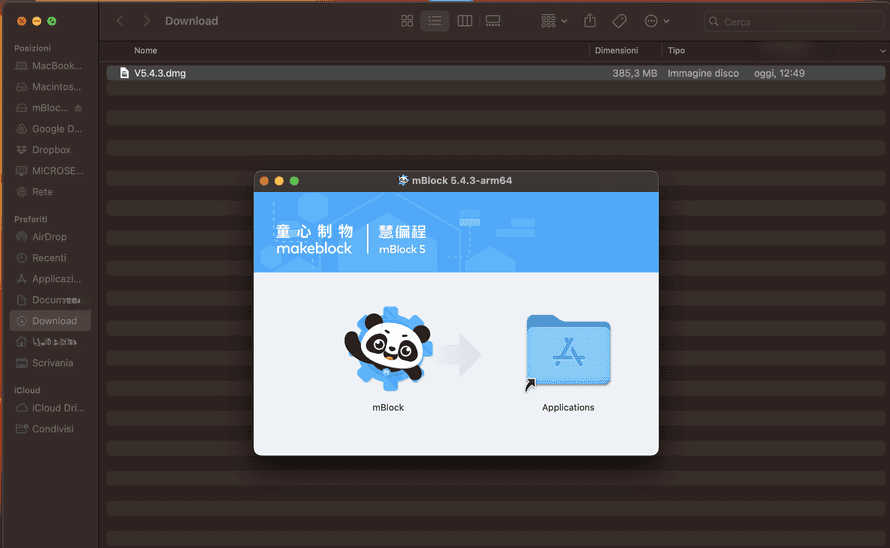
Licencia CC-BY -SA https://docs.arduino.cc/tutorials/alvik/getting-started-mblock/
Dos formas de programar con mBlock
DOS FORMAS DE PROGRAMAR EN MBLOCK
Como vemos, mBlock permite dos formas de programar :
OPCIÓN Programación en vivo
El programa reside en el ordenador, y en la placa hay instalado un Firmware para ir escuchando y ejecutando lo que manda el ordenador.
- VENTAJAS
- Te permite interactuar el robot y el ordenador, por ejemplo podemos hacer que cuando el detector de humedad detecte agua, que salga por pantalla un fondo acuático, o que pulsando una tecla del teclado se encienda un LED en la placa...
- DESVENTAJAS
- hay que cargar dentro del robot el Firmware exclusivo de mBlock para que Arduino haga caso a mBlock
- Hay que tener nuestro ordenador como intermediario, se come los recursos y puede que nuestro programa vaya lento
- Por supuesto necesita tener ordenador conectado al robot, o sea, trabaja como un esclavo del ordenador.
OPCIÓN Programación cargar a la placa
Todos los programas editores de Arduino (tanto los que programan con código como el Arduino IDE) como los editores de programas gráficos en bloque (mBlock, Snap4Arduino, Arduinoblocks, ...) permiten cargar el programa en la placa. Las ventajas y desventajas son las opuestas de trabajar en vivo.
EN VIVO ¿Qué es eso?
Existe una posibilidad de utilizar la placa "en vivo" frente a "cargar" el programa en la placa.
Es decir, interactuando con el ordenador. El programa está en el PC. En la placa hay un firmware que le dice que este a las órdenes del PC. De esta manera podemos por ejemplo:
- Enviar órdenes desde el ordenador a la placa.
Por ejemplo que al pulsar la tecla espacio que se encienda el led D13
- Enviar información desde la placa al ordenador
Por ejemplo que muestre por pantalla nos muestre la cantidad de luz, que registra el sensor LDR, etc...
Que nosotros sepamos, estos programas permiten la programación en vivo :
- mBlock placas: Arduino, Microbit, Raspberry Pi, ... robots de Makeblock: mBot, Cyberpi...
-EchidnaScratch CURSO DE ECHIDNA
-Microblocks
VENTAJAS LA PROGRAMACIÓN EN VIVO PERMITE MUCHO JUEGO Y POSIBILIDADES A LA HORA DE ELABORAR PROYECTOS
INCONVENIENTES: Necesitas el ordenador encendido y conectado al robot.
Preparando mBlock y el Arduino
Hay que hacer dos cosas
- Cuando te descargas mBlock por defecto está preparado para utilizarlo con los robots (mBot), hay que decirle que no vamos a conectar un robot, que la placa será Arduino UNO
- Nuestro ARDUINO no pueden entender mBlock por lo que hay que grabarle un software dentro (un software que se graba en una placa hardware se llama FIRMWARE, no se borra cuando se apaga) y este firmware entiende lo que le manda mBlock, es decir, si conectamos otro Arduino y no le hemos grabado el firmware, no entenderá a mBlock.
Lo mejor un tutorial muy breve:
Sensores
Esta sección es una visión rápida de las posibles entradas de los robots.
NO LEAS TODOS SINO LOS QUE TIENE TU ROBOT
Un poco de teoría...
Cualquier sistema de control podríamos decir que funciona de una manera similar a un ser humano, salvando las distancias. Nosotros recibimos la información del mundo exterior gracias a nuestros sentidos (oído, olfato, gusto, vista y tacto), nuestro cerebro procesa esa información y a través de nuestros músculos o de nuestra voz realizamos diferentes acciones. Pues lo mismo sucede con los sistemas de control, reciben información del exterior gracias a los diferentes SENSORES, procesan esa información en sus PLACAS CONTROLADORAS (sus cerebros) tales como Arduino y dan una respuesta utilizando sus diferentes ACTUADORES.
Un sensor es un objeto capaz de detectar magnitudes físicas o químicas y transformarlas en variables eléctricas. Los sensores o periféricos de entrada nos permiten obtener información del mundo real para utilizarla desde el programa de Arduino.
En la actualidad la cantidad de sensores disponibles es tan extensa como las variables que queramos medir, desde sensores de temperatura, humedad, luminosidad,... hasta acelerómetros, giroscopios, GPS,... pasando por detectores de gases, de pulsos cardiacos, sensores de efecto HALL,...
Tipos de sensores
- DIGITAL: un sensor digital sólo tiene dos estados: activado/desactivado, ON/OFF, 1/0, Alto/Bajo, ... En este caso conectaremos el sensor a una de las entradas digitales de Arduino para leer el estado.
Ejemplo: un pulsador es un tipo de sensor sencillo que sólo nos da dos estados, “pulsado o no pulsado”. Conectado a la placa Arduino debe generar 0v en reposo y 5v al pulsarlo. De esta forma desde el programa de Arduino podremos leer el estado del botón.

- ANALÓGICO: el sensor nos puede dar un rango de valores, normalmente se traduce en un valor de tensión o de corriente variable en función de la señal captada al sensor. En este caso conectaremos el sensor a una de las entradas analógicas de Arduino (A0,..., A5). El rango de entrada será una tensión entre 0v (GND) y 5v.
Ejemplo: Una fotorresistencia es un componente electrónico cuya resistencia disminuye con el aumento de intensidad de luz incidente. Su valor varía entre 0 y 5 v. la cantidad de valores que pueden leer las entradas analógicas de Ardunio son de 10 bits es decir 1024 valores. De tal modo que 0 = 0 v. y 1023 = 5V.

- DATOS: el sensor ofrece su información a través de una interfaz de comunicación. La forma de comunicación puede ser por sistemas estándar como I2C o SPI o algunos sensores usan su propio protocolo para codificar la información y debemos realizar desde el software la decodificación correcta para interpretar los datos del sensor (normalmente los desarrolladores de este tipo de sensores ofrecen una librería software para Arduino que hace todo el trabajo).
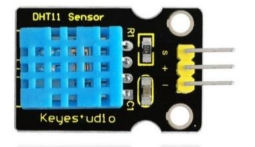
Ejemplo: el sensor DHT11. Por un solo pin envía los datos de temperatura y humedad.
Sensores modulares.
En la actualidad existen infinidad de sensores que los fabricantes presentan en forma modular. Esto hace que su conexión y utilización sea mucho más sencilla que la tradicional, olvidándonos de resistencias, polaridades, cableados,… para su correcto funcionamiento.
Sensor pulsador
Es un sensor digital, que presenta dos estados; cuando se presiona el botón, emite una señal de bajo (0V), cuando suelta el botón, emite una señal de bajo alto (5V). Datasheet
Un ejemplo de uso

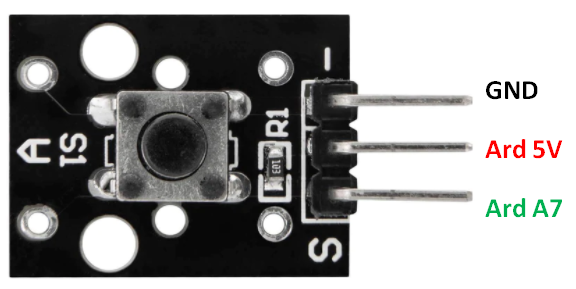
Otra manera más "barata" de sustituir este módulo pulsador es poner un pulsador normal y una resistencia (±10k), al pulsar se produce una entrada en el Arduino, hay dos configuraciones, que al pulsar se emita un 0 lógico (configuración Pull up) o que al pulsar emita un 1 lógico (configuración Pull down) ¿Por qué hay que poner una resistencia?
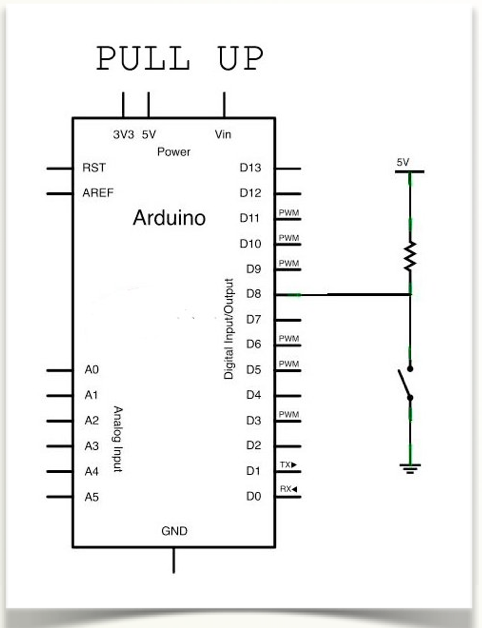
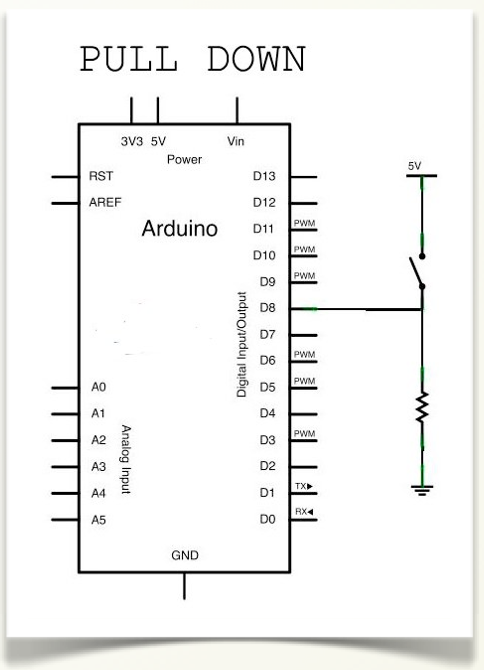
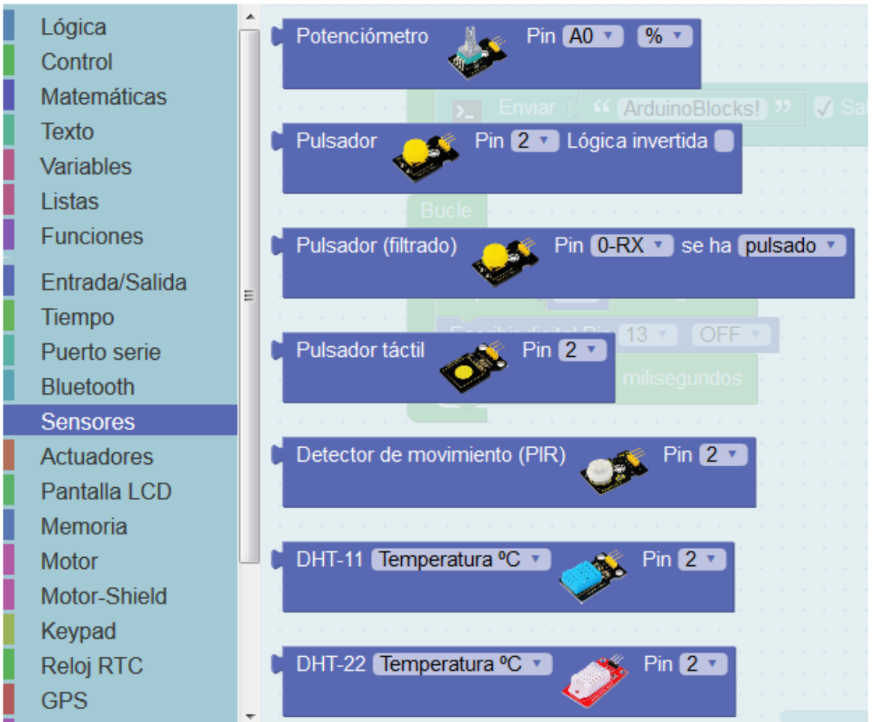
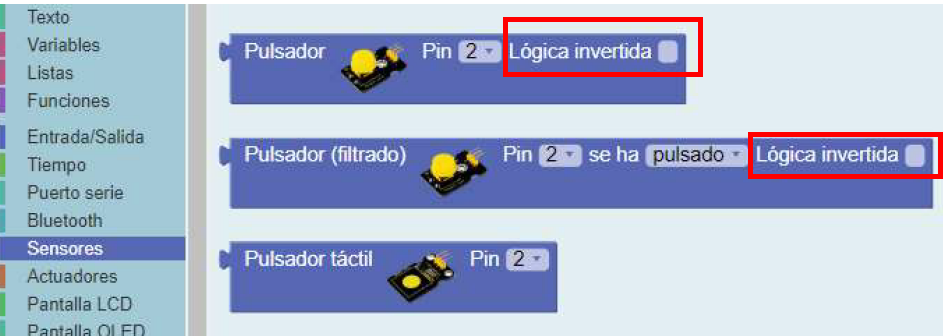
Lo "normal" es que al pulsar se emita un '1' configuración Pull down, pero hay pulsadores que funcionan Pull up y los llaman lógica invertida, por eso en la programación por bloques podemos encontrar esto:
Sensor Táctil Capacitivo.
Este pequeño sensor puede "sentir" a las personas y el tacto y la retroalimentación de metales a un nivel de voltaje alto / bajo. Incluso aislado por alguna tela y papel, todavía puede sentir el tacto. Su sensibilidad disminuye a medida que la
capa de aislamiento se hace más gruesa. En nuestra opinión lo preferimos frente al Sensor pulsador pues es muy económico, duradero y fiable.
Un ejemplo de uso en

Potenciómetro y joystick
Un potenciómetro es una resistencia variable, es decir, cambia de valor mecánicamente, lo tenemos en multitud de dispositivos. El joystick es internamente dos potenciómetros con un pulsador integrado en un solo mando.
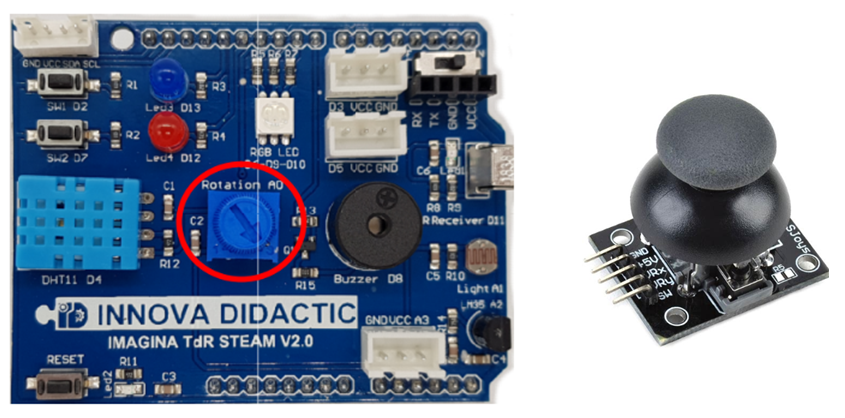
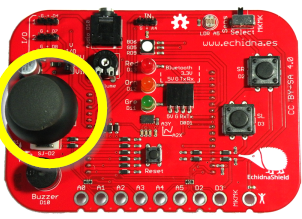
Este sensor es analógico, su salida puede ser cualquier valor entre Vcc y GND (si está en divisor de tensión como en la placa Edubásica no llega a esos valores extremos), por lo tanto hay que conectarlo a una entrada analógica de Arduino y como cualquier entrada analógica, proporcionará valores entre 0 y 1023.
Ejemplos de uso:
- Arduino con código: Mapeo del potenciómetro
- Arduino con código: Regular la luz con potenciómetro
- Arduinoblocks en el aula
- En Arduino con Echidna, con joystick
- Domótica con Arduino con joystick
Sensor Fotocélula LDR.
El uso de fotocélulas es muy común en nuestras vidas, las encontramos en el encendido automático de farolas, apertura de puertas,… La fotocélula es un semiconductor. Es ampliamente utilizado en campos de interruptores de control automático como cámaras, luces solares de jardín, lámparas de césped, detectores de dinero, relojes de cuarzo, tazas de música, cajas de regalo, mini luces nocturnas, interruptores de control de luz y sonido, etc.
Es un sensor analógico dando valores entre 0 y 5V y como entrada analógica de un Arduino se traduce en un rango de 0 a 1023 valores.
Un ejemplos de uso :
- el interruptor crepuscular del curso Arduino con ArduinoBlocks
- Medir la luz en Rover con Arduino
- Medir la oscuridad en Arduino con mBlock
- Hinchar un balón en Arduino con mBlock
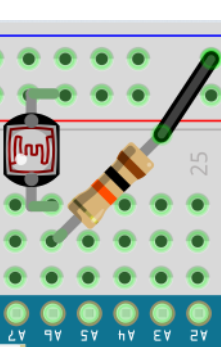
Una manera más económica de montar este sensor es utilizar una resistencia y un LDR:
- El LDR cuando más oscuridad, más resistencia
- En una configuración PULL DOWN, cuanto más luz, la resistencia del LDR baja, por lo tanto más tensión en A6

Los módulos LDR que se venden suelen esta configuración Pull down, es decir, cuanto más luz, más tensión:

La instrucción con Arduinoblocks ya cuenta con esta configuración Pull downUp de que cuando más luz, más valor tiene la entrada analógica.

Hay módulos LDR ya montados, que tienen componentes activos es decir, llevan circuitos electrónicos, transistores que amplifican etc... y dan la salida digital con un potenciómetro para definir el rango de luz que cambia de estado lógico. Puedes ver en la figura que tiene una salida digital D0.

O hay algunos que tienen 4 pines como en la figura que ofrecen las dos cosas: salida analógica A0 y digital D0.
Nosotros aconsejamos el divisor de tensión por tres razones: más barato, no implica gran circuitería y es visible su funcionamiento frente a estos encapsulados.
Sensor de Ultrasonidos.
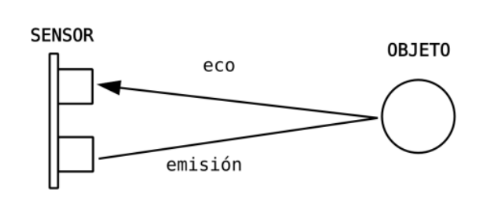
Es un sensor digital de distancias por ultrasonidos capaz de detectar objetos y calcular la distancia a la que se encuentra en un rango de 2 a 350 cm. Su uso es tan sencillo como enviar el pulso de arranque y medir la anchura del pulso de retorno.
No es un sensor preciso, con una ligera inclinación de la superficie ya da lecturas erróneas pero es muy barato
El más común es el HC-SR04 que tiene 4 pines de conexión: VCC Trig (Disparo del ultrasonido) Echo (Recepción del ultrasonido) y GND aunque en algunos modelos como el de Elecfreaks tiene 3 pines. Integra Trig y Echo en uno sólo.
La distancia se calcula con esta fórmula:
Distancia en cm = {(Tiempo en segundos entre Trig y el Echo) * (V.Sonido 34000 en cm/s)} / 2
Si programas en código, tienes que utilizar la fórmula anterior, previamente tienes que programar el cálculo del tiempo entre una emisión de un pulso en Trg y la respuesta en Echo.
Si utilizas la programación en bloques, no es necesario, seguro que hay un bloque que lo hace todo por ti 😍
Ejemplos de uso:
- Alarma en Domótica con Arduino
- Piano invisible en Arduino con ArduinoBlocks,
- Sensor parking en Arduino con ArduinoBlocks
- Piano invisible en Arduino con mBlock
- Sensor parking en Arduino con mBlock
- Sensor de distancia de ultrasonidos con Picobricks
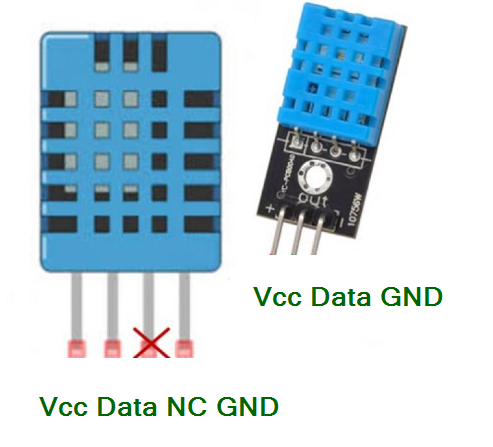
Sensor DHT11 (Temperatura y Humedad).
Este sensor de temperatura y humedad DHT11 nos permite determinar las zonas de confort para un rango de temperaturas entre 0ºC y 50ºC con un error de ± 2ºC y un rango de humedad entre 20 y 90 % ± 5% . Una salida digital para dos variables cómo lo hace? Tiene dentro un pequeño microprocesador que lanza por el bit de datos 40 bits en serie, los 16 primeros son la humedad (en BCD) y los 16 restantes es la temperatura (en BCD) los 8 restantes son de comprobación Checksum (en binario) como la letra del DNI. Por ejemplo 0100 0111 0000 0011 0001 1001 0000 0000 0001 1000 es 0100 0111 0000 0011 = 47.03% de humedad y 0001 1001 0000 0000 = 19.00ºC y la comprobación es la suma de 4+7+0+3+1+9+0+0=24=11000
Ejemplos de uso:
- Medir H y T con Blink en Rover con Arduino
- Estación meteorológica Arduino con Arduinoblocks
- Arduinoblocks en el aula
- SMART HOME con Micro:bit
No es un sensor con gran sensibilidad, pero para propósitos educativos cumple sus funciones. Por dentro tiene una resistencia NTC que decrementa su resistencia si aumenta la temperatura. Hay otros que van al revés, los PTC. Tanto los NTC como los PTC se llaman thermistores. Para la humedad, mide la capacidad de un condensador que es sensible a la humedad, o sea, un sensor capacitivo.
Tenemos dos opciones comerciales: Encapsulado que lo tienes preparado para conectar la alimentación y leer por el pin de datos, o sin encapsular, que hay que colocar una resistencia de aproximadamente 10k entre Vcc y Data
Ejemplo de uso de un DHT11 sin encapsular:

Fuente Luis LLamas CC-BY-NC-SA https://www.luisllamas.es/arduino-dht11-dht22/
Si queremos mejorar la sensibilidad, podemos utilizar el DHT22 que es igual pero de color blanco y más caro. Si lo que queremos es sólo la temperatura es mejor utilizar el LM35D que tiene un rango de temperaturas desde 0ºC a 100ºC con una sensibilidad de 2mV/ºC

Es un sensor bastante mediocre, si necesitas una precisión el doble, te recomendamos el DHT22 que funciona exáctamente igual pero es de color blanco y más caro ⁓3€. Ver https://www.luisllamas.es/arduino-dht11-dht22/
Sensor IR
Es un sensor para distancias cortas hasta 2cm y no da la distancia, simplemente si hay o no hay obstáculo, pero son muy baratos, unos 0.30€. Aquí tienes un ejemplo de evita obstáculos en un rover marciano con Raspberry Para saber más te recomendamos esta página de Luis Llamas
IR Sensor Module for Arduino Projects | 3D Model by Veer AI on Sketchfab
Sensor llama
Este sensor de llama se puede utilizar para detectar fuego u otras luces cuya longitud de onda se encuentra entre 760 nm ~ 1100nm.
Un ejemplo de su uso:


Sensor de Gas (MQ2).
Detecta gases inflamables : GLP, I-butano, propano, metano, alcohol, hidrógeno, humo... con más sensibilidad en algunos que en otros. Siempre detecta el conjunto. Son usados en electrónica de consumo y mercados industriales.
- Sensibilidad Tiene alta sensibilidad y se puede ajustar girando el potenciómetro.
- Tiempo de respuesta: Internamente posee un calentador para aumentar su temperatura y que estos gases reaccionen con la resistencia interna que tiene, por lo tanto tardan algo en responder la primera vez que se conectan, incluso horas en algunos modelos. Una vez calentados son rápidos en la respuesta.
- Tipo de salida: Analógico pero si tiene 4 pines como el de la figura, incorpora un pin digital.
- Ejemplos de uso:

Sensor de humedad de suelo.
Un higrómetro de suelo FC-28 es un sensor que mide la humedad del suelo. Son ampliamente empleados en sistemas automáticos de riego para detectar cuando es necesario activar el sistema de bombeo. El FC-28 es un sensor sencillo que mide la humedad del suelo por la variación de su conductividad. No tiene la precisión suficiente para realizar una medición absoluta de la humedad del suelo, pero tampoco es necesario para controlar un sistema de riego. Los valores obtenidos van desde 0 sumergido en agua, a 1023 en el aire (o en un suelo muy seco). Un suelo ligeramente húmero daría valores típicos de 600-700. Un suelo seco tendrá valores de 800-1023.
Luis Llamas CC-NC-BY-SA https://www.luisllamas.es/arduino-humedad-suelo-fc-28/
Se puede utilizar este sensor para hacer un dispositivo de riego automático, puede detectar si las plantas “tienen sed” y evitar que se marchiten.
La corriente de trabajo del sensor es menor de 20mA. El voltaje de salida es de 0V (en el aire) a 2,3V (totalmente sumergido en agua).

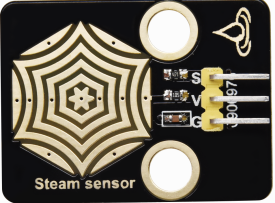
Sensor de humedad.
Este sensor analógico está diseñado para identificar y detectar la presencia de agua y su cantidad. Puede servir para detectar el nivel de agua, para disparar una alarma en caso de una fuga de agua, también para hacer un limpiapalabrisas automático.... puedes ver un ejemplo de uso en :
Mide el volumen de agua caída a través de una serie de rastros de cables paralelos expuestos.

Sensor de efecto Hall.
Este es un sensor de inducción magnética. Detecta los materiales magnéticos dentro de un rango de detección de hasta 3 cm. El rango de detección y la fuerza del campo magnético son proporcionales. La salida es digital.


Sensor Hall. Edwin Helber Hall De Desconocido - Popular Science Monthly Volume 64, Dominio público
Edwin Helbert Hall descubrió en 1879 que en presencia de un campo magnético, un conductor que conduzca una corriente se le producía un campo eléctrico porque las cargas eléctricas se desviaban de su trayectoria principal, nuestro sensor simplemente mide ese campo eléctrico:

De Luis Llamas CC-BY-NC
El sensor tiene un led de color rojo que indica que hay una lectura de campo magnético. Un ejemplo de uso lo puedes ver aquí: medir rocas magnéticas con el Rover con Arduino
Sensor inclinación
Este sensor funciona al hacerle vibrar, emitiendo una señal digital de todo o nada. El módulo del sensor viene provisto de un potenciómetro para poder regularlo.

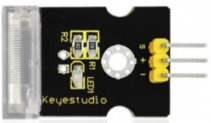
Sensor de golpe
Es un sensor digital que al ser golpeado este sensor envía una señal momentánea.
Sensor de pulso cardíaco.
Este módulo utiliza un LED infrarrojo (IR) ultrabrillante y un fototransistor para detectar el pulso en el dedo. Principio de funcionamiento: Se debe colocar el dedo entre el LED infrarrojo ultrabrillante (parte superior) mientras que el fototransistor, que queda en el otro lado, recoge la cantidad de luz transmitida. La resistencia del fototransistor variará levemente a medida que la sangre pase a través de su dedo.

Sensor de Alcohol.
Este sensor de gas analógico MQ-3 es adecuado para detectar alcohol. Se puede usar en un analizador de aliento. También tiene una alta sensibilidad al alcohol y baja sensibilidad a la bencina (éter de petróleo). La sensibilidad se puede ajustar con el potenciómetro.

Sensor de CO2
Hay sensores que utilizan el protocolo I2C, este protocolo permite conexiones serie y pueden compartir el mismo cable pues cada elemento tiene una dirección diferente. Esto lo veremos en el Display LCD. Se identifican por los pinen SDA y SCL

Resistencia Flex
Es una resistencia que cuanto más se dobla más resistencia ofrece, desde 25k hasta 125k

Para utilizar esta resistencia haremos un DIVISOR DE TENSIÓN que consistirá en poner dos resistencias en serie y repartirá la tensión total entre 0V y 5V en las dos resistencias, el punto medio será un punto que tendrá una tensión variable en función de las dos resistencias, como la es variable, esa tensión es variable y ya tenemos la entrada analógica:

Es decir:
- La resistencia entre masa GND del ARDUINO (cable negro) y un punto en la placa protoboard
- ese punto medio conectarlo a una entrada analógica, por ejemplo A0 (cable amarillo)
- Una resistencia de valor parecida a la Flex de decenas de K entre ese punto y +5V (cable rojo en la foto)

Este sensor tiene posibilidades para usarlo en "ropa inteligente".
Sensor de movimiento
Los sensores infrarrojos pasivos (PIR) son dispositivos para la detección de movimiento. Son baratos, pequeños, de baja potencia, y fáciles de usar. Por esta razón son frecuentemente usados en juguetes, aplicaciones domóticas o sistemas de seguridad.
Los sensores PIR se basan en la medición de la radiación infrarroja. Todos los cuerpos (vivos o no) emiten una cierta cantidad de energía infrarroja, mayor cuanto mayor es su temperatura. Los dispositivos PIR disponen de un sensor piro eléctrico capaz de captar esta radiación y convertirla en una señal eléctrica.
En realidad cada sensor está dividido en dos campos y se dispone de un circuito eléctrico que compensa ambas mediciones. Si ambos campos reciben la misma cantidad de infrarrojos la señal eléctrica resultante es nula. Por el contrario, si los dos campos realizan una medición diferente, se genera una señal eléctrica.
De esta forma, si un objeto atraviesa uno de los campos se genera una señal eléctrica diferencial, que es captada por el sensor, y se emite una señal digital.
El otro elemento restante para que todo funcione es la óptica del sensor. Básicamente es una cúpula de plástico formada por lentes de fresnel, que divide el espacio en zonas, y enfoca la radiación infrarroja a cada uno de los campos del PIR.
De esta manera, cada uno de los sensores capta un promedio de la radiación infrarroja del entorno. Cuando un objeto entra en el rango del sensor, alguna de las zonas marcadas por la óptica recibirá una cantidad distinta de radiación, que será captado por uno de los campos del sensor PIR, disparando la alarma.
Luis Llamas CC-BY-NC-SA https://www.luisllamas.es/detector-de-movimiento-con-arduino-y-sensor-pir/
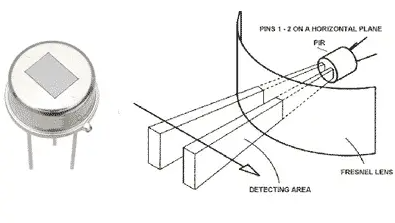

Puedes ver ejemplos de uso en robótica en :

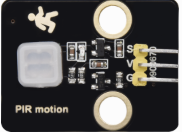
Más sensibles son los sensores de microondas. Son un radar que por efecto Doppler pueden captar cualquier objeto en movimiento dentro de un alcance de 5-7 metros en cualquier dirección e independiente de su temperatura. Es un buen sensor para alarmas, activación de luz por presencia..... Para saber más ver la página de Luis Llamas

Su conexión es muy sencilla, es un detector digital que hay que alimentarlo como el resto de sensores.

Curiosamente, la gran ventaja técnica de los de microondas es un gran inconveniente para usarlo en el aula, con cualquier movimiento se dispara, luego para clase es mejor el sensor PIR
Esta página esta adaptada de este enlace. José Andrés Echevarría @cantabRobots CC-BY-NC-SA.
Actuadores y otras salidas
Esta página es un repaso rápido de las posibles salidas de los robots
NO LEAS TODOS SÓLO LOS QUE TIENE TU ROBOT
¿Qué es un actuador?
Un actuador es el nombre genérico que empleamos para cualquier dispositivo capaz de realizar acciones en el mundo físico y que podremos controlar desde un autómata o procesador como Arduino. En particular, usamos el nombre actuador para los dispositivos que son capaces de generar movimiento. Luis LLamas CC-BY-NC-SA
ACTUADORES
Motores baja potencia
Con el Arduino podemos usar motores de corriente continua de juguete como en la figura, aptos para poner un ventilador. Ejemplo de uso Smart Home para microbit

Motores con algo de potencia
Si quieres usar un motor para mover unas ruedas, ya pide más corriente, no se puede conectar directamente al la placa (Arduino, esp32 etc..). El de la figura es típico en robótica y lleva reductores dentro para bajar la velocidad :

Necesita una alimentación extra, como el LM298N y las pilas., o el B6612FNG o una shield específica.

CC-BY-NC Luis Llamas
Ejemplos de uso lo puedes ver en
- Curso mClon con nanoArduino con el B6612FNG
- Curso Rover con Arduino con la shield L293D ESP-12E para el NODE MCU que internamente tiene el LM298N
- Curso Arduino con código con LM298N y también con un transistor
Los motores pueden (y deben) de estar conectados a salidas PWM de tal manera que se pueda regular la potencia y por lo tanto la velocidad.
Servos
Un servo convencional es un motor donde fijamos el ángulo desde 0º a 180º, pero si queremos una rotación, existen servos rotatorios que simplemente tienen su velocidad de rotación controlada
Ejemplos de uso de servos:
- Curso Arduino con código
- Curso brazo robótico del mClon con nanoArduino
- Apertura de barrera por ultrasonidos en curso Arduino con ArduinoBlocks
- Tractor entrando en el corral Arduino con EchidnaShield
- Apertura de puerta Domótica con Arduino
- Servo con PicoBrick
- Apertura ventana y puerta en Smarth Home para microbit
- Smart Agriculture Kit para micro:bit
Relés
Un relé es un interruptor activado por un electroimán, lo que permite independizar los circuitos. En el dibujo se ve que el circuito rojo de 220V esta separado del verde, de sólo 1.5V. Pero es el circuito verde que al funcionar, hace que el electroimán mueva el interruptor del relé y encienda la bombilla. El objetivo es que he podido encender una bombilla de 220V sin tocar los 220V peligrosos. En el circuito verde, el interruptor puede ser un Arduino. Experiméntalo en este simulador.
- Un ejemplo con Arduino en Luis LLamas
- Un ejemplo de uso en Picobricks
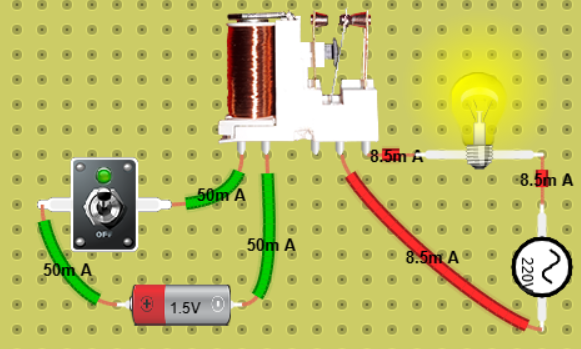
Electroimán
El electroimán no se puede conectar directamente, utilizaremos una etapa de potencia, por ejemplo el transistor el IRF520N que amplifique la señal del Arduino, pues las salidas de Arduino no tienen potencia para mover el electroimán. Para dar esa potencia utilizaremos otra fuente externa, unas pilas:
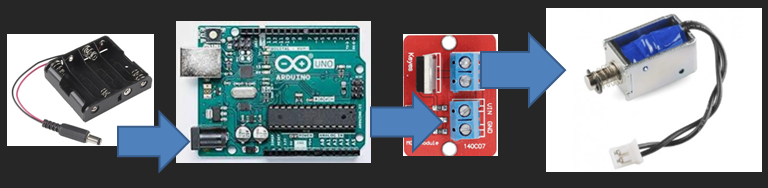
Las conexiones son :
- SIG del IRF520N a una salida digital por ejemplo D13
- VCC del IRF5020N al 5V del ARDUINO
- Los dos GND del IRF520N a GND del ARDUINO
- V+ y V- del IRF5020N al solenoide, da igual qué cable pues no tiene polaridad.
- VIN del IRF520N al VIN del ARDUINO (son los voltios de la pilas)
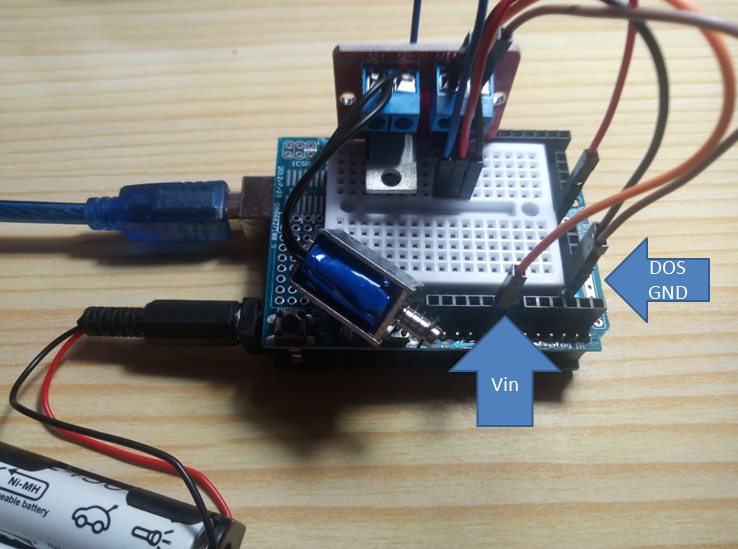
Motor paso a paso
Igual que el electroimán, necesitamos un controlador que nos de la potencia necesaria para mover el motor, el ULN2003

Imagen BY-NC-SA de Luis Llamas
También igual que el electroimán, necesitamos una potencia extra con las pilas:

Conexión :
- Cuatro pines digitales del ARDUINO al IN1,IN2,IN3,IN4 del ULN2003 por ejemplo D10,D11,D12,D13
- El conector blanco del ULN2003 al motor paso a paso
- El (+) del ULN2003 al Vin del ARDUINO
- El (-) del ULN2003 al GND del ARDUINO

La configuración más sencilla es la rotación simple en sentido horario (llamada fase1) :

Imagen BY-NC-SA de Luis Llamas
Es decir:
| Paso | IN1=D10 | IN2=D11 | IN3=D12 | IN4=D13 |
|---|---|---|---|---|
| Paso 1 | ON | OFF | OFF | OFF |
| Paso 2 | OFF | ON | OFF | OFF |
| Paso 3 | OFF | OFF | ON | OFF |
| Paso 4 | OFF | OFF | OFF | ON |
Si has entendido este ejemplo serás capaz de realizar las configuraciones que desees.
OTRAS SALIDAS
No son actuadores pues no representan movimiento pero son también salidas del Arduino como los actuadores, luego lo vemos en esta página
Buzzer activo
Reproduce un tono de una frecuencia determinada por el fabricante cuando recibe un '1' digital. Su conexión es muy simple:
- GND a GND y VCC a 5V (ojo que están a los dos extremos, marcados en rojo y en negro)
- OUT o también señalado como I/O a un pin digital, por ejemplo D13

Ejemplos de uso:
- Domótica con Arduino: Apertura puerta con mBlock
- Domótica con Arduino Apertura puerta con código
Buzzer pasivo
La diferencia de un buzzer activo con el pasivo es que el pasivo hay que mandar la onda que se tiene que reproducir, como Arduino no puede reproducir onda puras (senoidales analógicas), se le envía ondas cuadradas con la frecuencia que se pretende reproducir. Como se puede ver en la figura, no tiene elementos auxiliares para reproducir un tono, es simplemente un altavoz.

Ejemplos de uso
LEDS Y OTROS ELEMENTOS VISUALIZADORES
Led normal
Un diodo es la unión de dos semiconductores P-N que sólo permite la corriente en un sentido. Un diodo LED es un diodo, que al pasar esta corriente emite una luz. Hay de 3mm y de 5mm de grosor, transparentes, traslúcidos y de colores (realmente son traslúcidos tintados)
Tenemos pues que respetar su polaridad para que funcione:
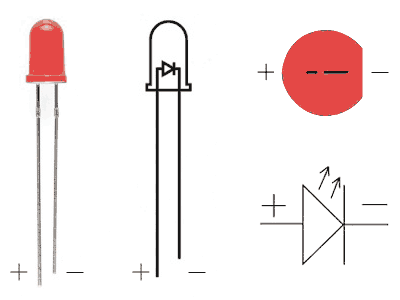
Fuente Luis LLamas CC-BY-NC Encender LED con Arduino
Si alimentamos el LED con una tensión inferior a su tensión de polarización directa Vd ±1,4V-3,8V el led no luce. si alimentamos con una tensión superior, la corriente que circula se dispara por lo que se rompe. Conclusión: Hay que poner una resistencia limitante. Para calcularla te recomiendo la página de Luis Llamas Encender LED con Arduino
Aquí puedes ver un ejemplo de semáforo en el curso Arduino con código

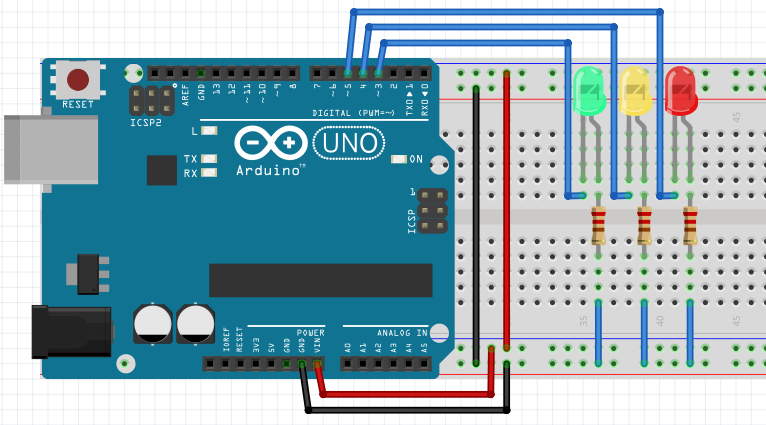
Se puede conectar directamente pues las salidas de Arduino tienen una limitación interna de 20mA como en este ejemplo https://www.youtube.com/watch?v=EFFSLvIF9rY
Los LEDS igual que los motores pueden se encendidos o todo o nada con salidas digitales 0 y 1 o salidas PWM de esta manera conseguimos luminosidades medias, en esta práctica con el potenciómetro se regula la intensidad de la luz de un LED
Led RGB
Se trata de un encapsulado que integra 3 leds de los tres colores básicos. Cada color básico se puede regular desde 0 a 255 de intensidad, luego tenemos 16 millones de tonalidades diferentes.
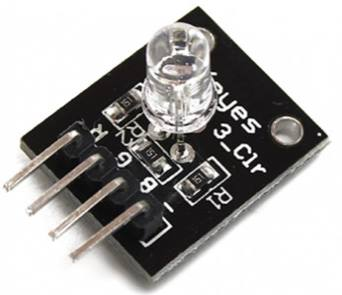
Un ejemplo de su uso lo puedes ver en
Existen LEDS RGB que se comunican unos a otros, (ver este ejemplo en el curso mClon) como las tiras de leds RGB que cambian de color todos simultáneamente.
Neopixel
La cinta LED RGB se basa en el chip controlador WS2812B de Neopixel con el cual podemos tener el control de cada pixel y de cada color, ya sea rojo, verde y azul a través de un solo cable de datos.
Los WS2811, WS2812 y WS2812B son LED que disponen de lógica integrada, por lo que es posible variar el color de cada LED de forma individual (a diferencia de las tiras RGB convencionales en las que todos los LED cambian de color de forma simultánea). Están basados en el LED 5050, llamado así porque tiene un tamaño de 5.0 x 5.0 mm.
Es un LED de bajo consumo y alto brillo, que incorpora en un único encapsulado los 3 colores RGB. La genial novedad del WS2812B (y resto de familia) es añadir un integrado dentro de cada LED, que permite acceder a cada pixel de forma individual. Por este motivo este tipo de LED se denominan “individual addressable”. Esto abre la puerta a un sinfín de aplicaciones y combinaciones, que van desde dotar de iluminaciones distintas zonas con una única tira, animaciones complejas, o incluso generar pantallas enteras de alta luminosidad....
A los LED WS2812B también se les denomina NeoPixel
Luis Llamas CC-BY-NS-SA https://www.luisllamas.es/arduino-led-rgb-ws2812b/

- Smart Home para Microbit con 4 leds RGB Neopixel
- Smart Home para ESP32
- Smart Agriculture Kit micro:bit
Láser
El diodo láser es un elemento motivador, barato y fácil de usar con el Arduino pues se activa digitalmente, si enviamos un 1 emite un rayo láser. Un ejemplo de uso lo puedes ver en la Alarma por láser en Domótica con Arduino

Si quieres saber más de este componente, te recomendamos esta página de Luis Llamas.
Si tienes que comprar uno, es importante que no sea superior a 5mW, pues puede dañar permanentemente la retina del ojo [+info].
El modelo que proponemos es de 1mW, no obstante, EVITA SIEMPRE QUE EL LÁSER APUNTE A LOS OJOS especialmente con niños.

Display LCD
Si queremos visualizar datos de forma independiente del ordenador, existen matrices de led que puedes ver en los cursos de mBot o mClon pero lo mejor es una pantalla Liquid Crystal Display y la mejor forma de conectar esta interfaz es en serie utilizando el protocolo I2C.
Ejemplo de uso :
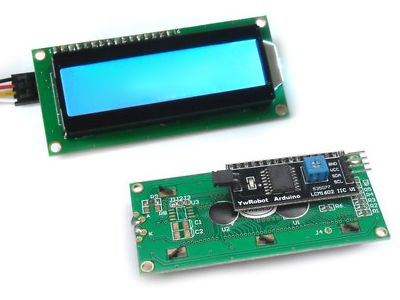
CC-BY-SA Luis Llamas
No confundas Display LCD con matriz de LEDs , o una OLED
Aclarando conceptos: Protocolo I2C
Es un protocolo de emitir los datos con sólo dos cables SDA (los datos) y SCL (reloj) y además pueden compartir varios dispositivos SLAVE) para ello la placa Arduino ESP32, microbit... (MASTER) tiene que saber qué dirección tiene cada dispositivo IMPORTANTE:
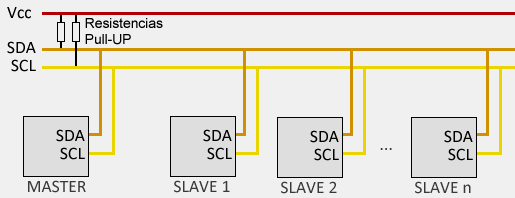
Fuente Luis Llamas ArduinoI2C CC-BY-SA
Aclarando conceptos: Lógica invertida
Igual que vimos en sensores, con las configuraciones Pull up y Pull down, las salidas de cualquier actuador PUEDEN SER LÓGICA INVERTIDA, mira en este NodeMCU (básicamente es un Arduino con wifi, aquí está conectado con el servidor Blynk) como funciona al revés, cuando apretamos, por lo tanto enviamos un uno a la salida, se apaga la salida !!
Kit de préstamo de CATEDU Arduino
El presente curso parte de que el alumno tiene el kit de préstamo que facilita CATEDU:

Arduino UNO
Se trata de una placa con un microcontrolador (un micro ordenador) y puertos digitales y analógicos de entrada y salida. ¿Por qué es tan famoso?

- Se trata de una placa de hardware libre
- Los programas para controlarlo son de código abierto
- Conexión por puerto USB de esta manera, el Arduino obedece al programa del ordenador, pero si queremos: el programa lo grabamos dentro del Arduino y gracias a un conector, puede funcionar con pilas e independiente del ordenador
Puertos:
- 14 pines digitales numerados del 0 al 13 y se pueden ser:
- De salida (sólo tiene dos estados LOW/HIGH)
- De entrada (valores: mínimo 0V y máximo 5V)
- 6 pines de salida "analógicos" 3-5-6-9-10-11 (sí, has leído bien, se repiten con los anteriores) tipo PWM (es decir, lo de salida analógica es una mentirijilla, es en formato de pulsos con duración proporcional al valor analógico que se quiera representar)
- 6 pines analógicos de entrada numerados como A0 hasta A5 (valores: mínimo 0V y máximo 5V) y ellos responden en formato de número entre 0 y 1023.
no está nada mal ¿no? y además barato !!!
Resistencias
La resistencias sirven para limitar la corriente. Lo utilizaremos en dos ocasiones:
- Limitar la corriente que circula en un diodo
- Limitar la corriente de carga de un condensador
También lo utilizaremos con el pulsador, para separar los voltios y para que tenga una tensión definida cuando el interruptor esté abierto (lo veremos en el siguiente capítulo)
Los valores de las resistencias en Ω se determina mediante la siguiente tabla:
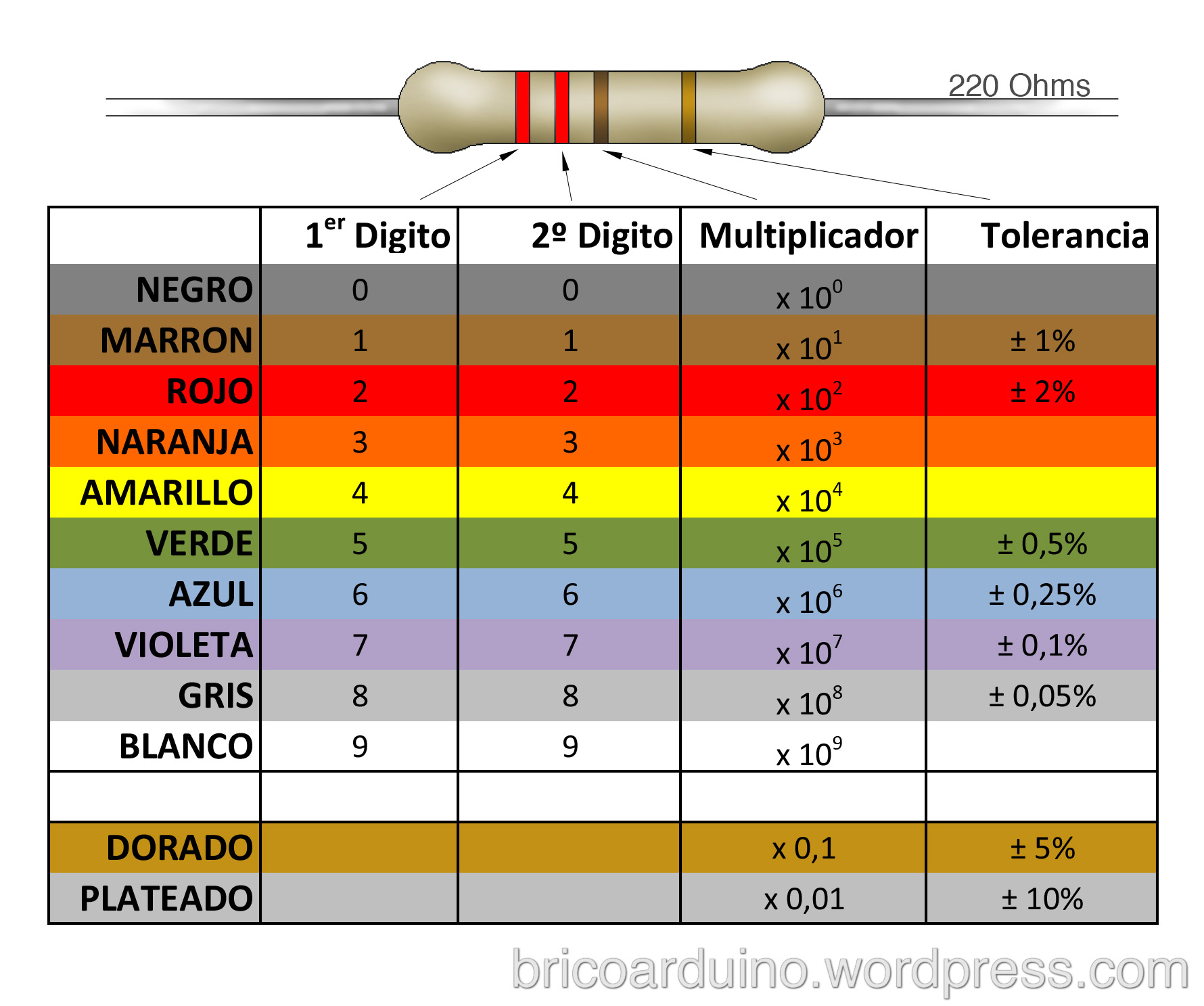
Placa Protoboard
Placa protoboard o placa de pruebas es un tablero con orificios

Estos se encuentran conectados eléctricamente entre sí de manera interna,el patrón de conexión es de líneas según este esquema:
¿Cómo está conectado?
La línea X (pintada de rojo) está toda conectada y la línea Y (pintada de azul) también.
Las líneas verticales 1 al 47 están conectadas verticalmente separados por la línea del medio, pero no horizontalmente (he pintado de verde las 4 primeras) es decir:
- A1 SI está conectado con B1C1D1E1
- A1 NO está conectado con A2B2C2D2E2
- A1 NO está conectado con F1G1H1I1J1

¿Cómo se utiliza?
La línea X (pintada de rojo) se suele utilizar para poner la alimentación (5V en nuestro caso) y la línea Y (pintada de azul) se suele conectar a 0V
Las líneas verdes es donde se conectan los componentes de tal manera que se pueda construir el circuito
Pulsadores
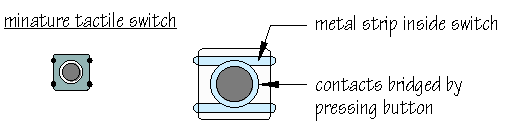
Un pulsador nos permitirá crear entradas digitales al Arduino
Los pulsadores proporcionados abren y cierran los pines que están en vertical, pero no en horizontal pues están conectados (ver figura de la izquierda)
Luego tenemos que fijarnos en los pines, si están en línea son los pines que no están conectados cuando no se pulsa, por lo tanto son estos los que tienen que ir en líneas diferentes de la placa protoboard.
Los pines que están en paralelo están conectados, por lo tanto tienen que estar en la misma línea:
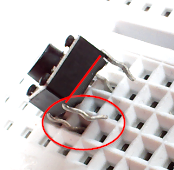

Pero ¿Cómo se conecta? un poco de teoría en la página siguiente.
Esto esta mal
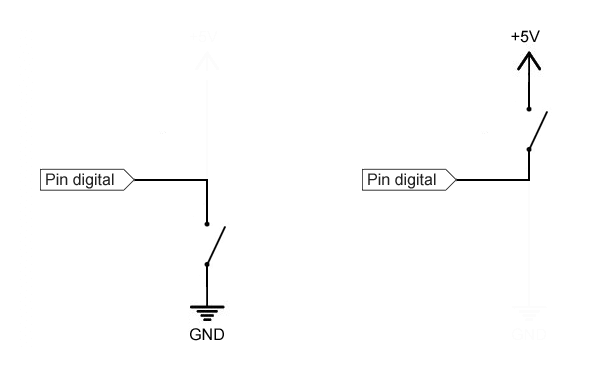 Fuente Luis Llamas https://www.luisllamas.es/leer-un-pulsador-con-arduino/
Fuente Luis Llamas https://www.luisllamas.es/leer-un-pulsador-con-arduino/
La sencilla razón es la siguiente ¿cuando el interruptor o pulsador esté abierto qué tensión tendrá "Pin digital"?
En vista de protoboard sería así:

El primer pulsador cuando se cierra si que proporciona 5V al pin 12 por el cable azul pero... ¿y cuando no está pulsado?
El segundo pulsador cuando se cierra sí que proporciona 0V al pin 13 por el pin verde pero... ¿y cuando no está pulsado?
Ah!! y por supuesto ni se te ocurra esto, provocarías un cortocircuito:
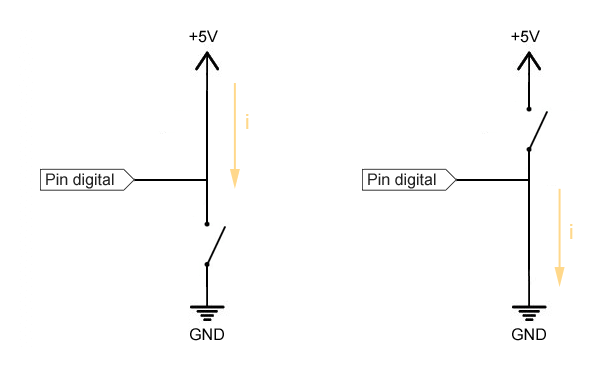
Fuente Luis Llamas https://www.luisllamas.es/leer-un-pulsador-con-arduino/
Esto esta bien
Lo correcto es hacerlo a través de resistencias, hay dos configuraciones, pull down o pull up según si la resistencia está abajo o arriba
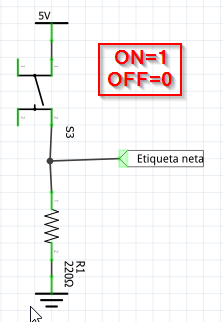

la más utilizada y lógica es la primera pull down, pues lo lógico es que cuando se cierra el pulsador, queremos transmitir un 1 lógico
Resumiendo: lo que tienes que hacer es una de estas dos configuraciones, la opción recomendada es PULL UP para que OFF = 0 y ON = 1
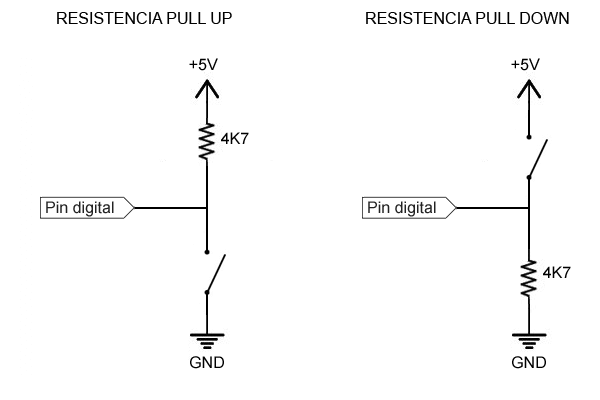
Fuente Luis Llamas https://www.luisllamas.es/leer-un-pulsador-con-arduino/
El valor de la resistencia puede ser de valores de algunos k
Visto en la placa el formato pull down:

Es decir (en la foto el cable verde del anterior dibujo es el blanco en la foto):

CONEXIÓN CON ARDUINO
Dos ejemplos sencillos para utilizar el pulsador, utilizaremos la resistencia configuración pull down y lo conectaremos al Arduino por A0
Utilizaremos la configuración PULL-DOWN es decir la resistencia "abajo" y el pulsador arriba, de esta manera:
- Cuando e pulsador está abierto, entonces enviamos un '0' lógico al Arduino.
- Cuando e pulsador está cerrado, entonces enviamos un '1' lógico al Arduino.

La forma de conectarlo en la placa Protoboard es (en este ejemplo lo conecta al pin digital 4):

Si quieres saber su contraria (Pull-up) visita esta página.
LED
LED= light-emitting diode: es un diodo emisor de luz que tiene polaridad, es decir, que tiene + y -

¿Cómo se conecta?
Pues a través de una resistencia, de valor de algunos k o centenares de Ω, cuanto más pequeña más se ilumina pero más peligro de fundir el led
En el ejemplo : conexión a la salida del pin 13 :

NOTA: A veces conectaremos el LED diréctamente, por simplificar, pues el ARDUINO TIENE UNA RESISTENCIAS INTERNAS DE 30k pero no es una buena práctica

Ejemplo de utilización
Mira el siguiente circuito NO LO HAGAS SÓLO MÍRALO Y OBSERVA:
La alimentación
- La línea X en esta placa está abajo del todo (para que veas otro modelo) y se ha conectado con los 5V del Arduino con un cable rojo
- - La línea Y es la segunda empezando de abajo y se ha conectado a 0V (GND del Arduino) con un cable azúl
El pulsador
- Se ha conectado un pin a masa a través de una resistencia y un pequeño cable azul
- Ese pin será la entrada al Arduino y con un cable negro va al pin digital 8 del Arduinio
- El otro extremo a 5V con un cable rojo
El LED
- Un extremo (el ánodo pata lárga) a las diferentes salidas digitales del Arduino (pines 7-6-5-4-3-2) a través de una resistencia
- El otro extremo (cátodo pata corta) a masa-Linea Y
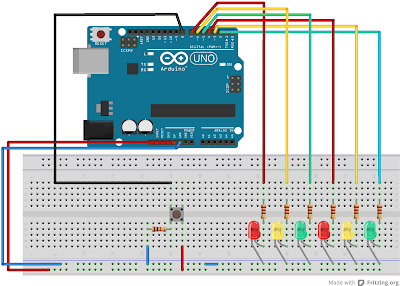
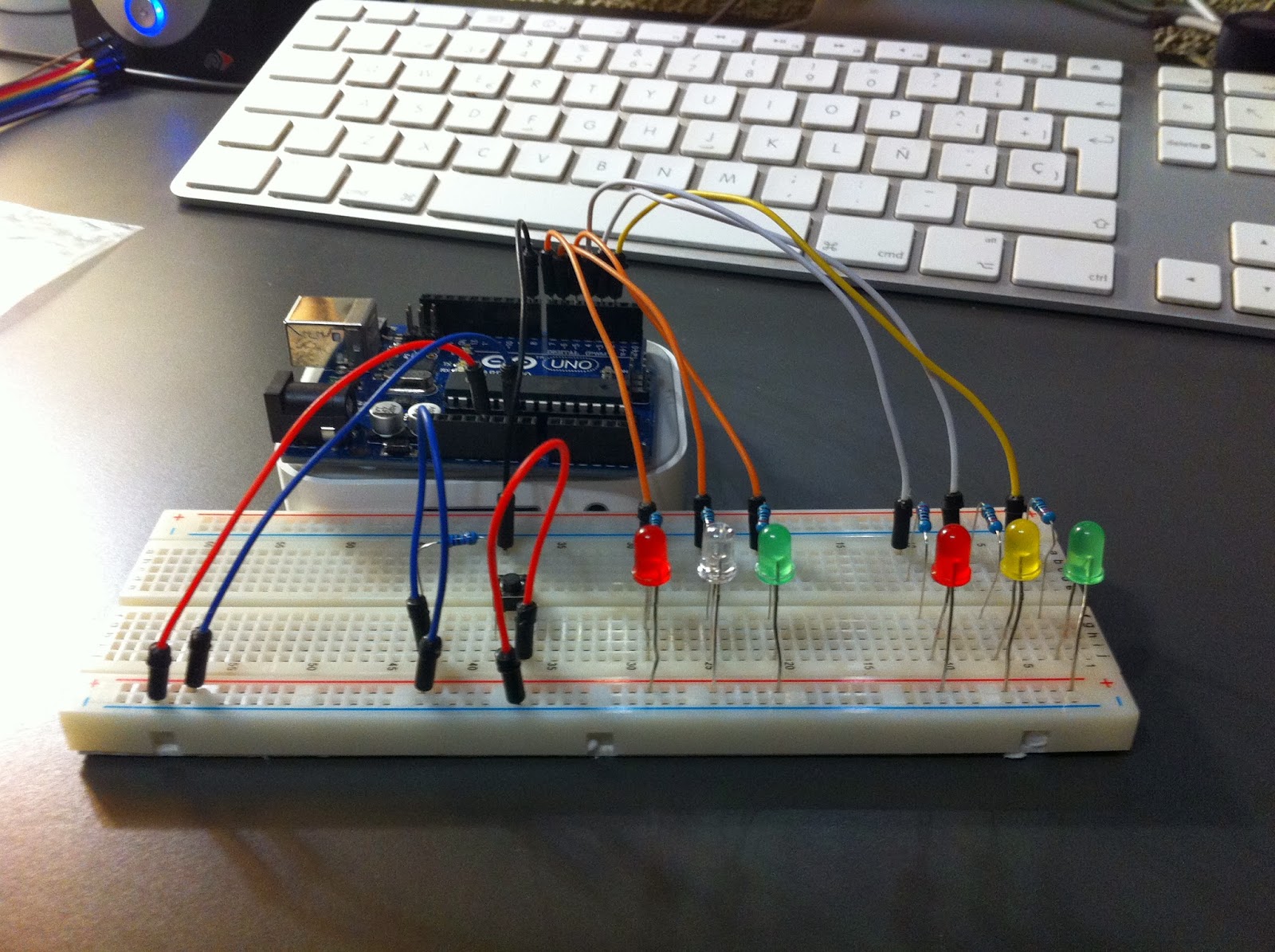
Condensador
¿Qué es?
Es un elemento que consta de dos placas separadas que son capaces de cargarse eléctricamente, su capacidad se mide en Faradios. Se puede interpretar como un globo que nos permite hincharlo de aire, y la capacidad los litros. Pero también pueden explotar !!! luego lee con atención:
ATENCIÓN Los condensadores (normalmente a partir de 1μF son electrólíticos) tienen POLARIDAD QUE ES IMPORTANTE
RESPETARLA, es decir, tienen un pin marcado con el signo (-) normalmente con franja blanca que tiene que ir al (-) o masa (GND 0V) de lo contario, revientan, con el consecuente peligro, más peligrosos cuanto más capacidad tienen.
ATENCIÓN Los condensadores tienen una tensión máxima de trabajo, marcado en el propio condensador, en nuestro caso los condensadores marcan 25V, luego se pueden utilizar sin problemas con el Arduino que la tensión máxima es 5V. Como si fuera la máxima presión que aguanta el globo antes de explotar.
¿No te lo crees? pues mira..
Carga y descarga
Si lo hacemos a través de una resistencia, tarda un tiempo a cargarse y también a descargarse (como si en el globo lo deshincháramos pero estrechando la boca)
El circuito de carga sería
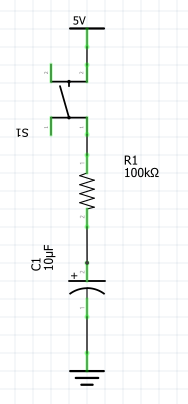

Fíjate que el lado (-) (la banda blanca) está conectado a GND
El circuito de descarga sería
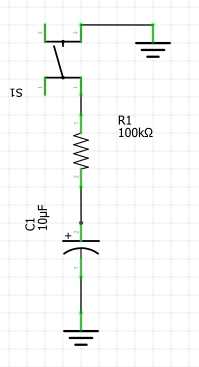

Cálculos
El tiempo de carga y de descarga se calcula con la fórmula :
T = 5 R C
En el caso de los circuitos de arriba T = 5 * 100k * 10μ = 5 * 100 000 * 0.00001 = 5 segundos
Igual que un globo, la carga evoluciona muy rápidamente al principio, pero a medida de que se va llenando, cuesta más, la gráfica de carga de un condensador es la siguiente:
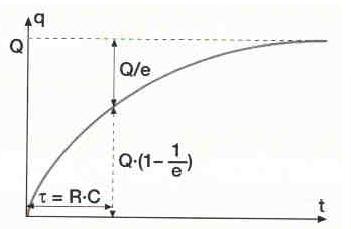
Y para la descarga es la siguiente
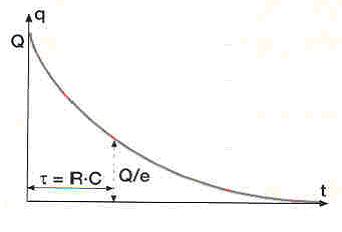
LDR
LDR= Light Depended Resistor es una resistencia que disminuye su valor cuando aumenta la luz.
Si se coloca en serie con una resistencia de un valor parecido, el punto de unión (cable verde) tiene una tensión variable con la luz que lo puede leer Arduino, en este esquema lo lee por la entrada A0

Si hay luz, el LDR disminuye su resistencia por lo tanto disminuye el valor de la tensión en A0, y viceversa.
Sensor ultrasonidos
El sensor dispone de un emisor T que emite una señal de ultrasonidos (a veces no es ultrasonidos, pues algunos lo pueden oir) y un receptor R que capta el eco del objeto que está delante de él. Su rango de detección va desde 2cm a 450cm

Tiene cuatro pines, dos son la alimentación que conectaremos Vcc a 5V, GND a 0V y los otros dos son los importantes:
- Trigger que emite un pulso
- Echo que recibe el pulso
Según el tiempo entre el pulso y el eco (T), la distancia a la cual se encuentra el objeto es : distancia = T * velocidad_sonido/2
Podemos conectar el pin trigger y echo donde queramos de las entradas y salidas digitales del Arduino, en este curso vamos a tomar como criterio:
- Trigger en el pin 4
- Echo en el pin 3

No tenemos que utilizar la fórmula para calcular la distancia, mBlock ya lo hace y la instrucción es muy sencilla, sólo hay que proporcionarle qué pin hemos conectado el trigger y qué pin hemos conectado el echo y él nos devuelve la distancia en centímetros:
![]()
Métodos para interactuar los objetos y el robot (dispositivo)
Si queremos que nuestro robot se pueda comunicar con el objeto o objetos que tenga mBlock, antes con mBlock 3.0 la comunicación era inmediata, fíjate en este script de una alarma:
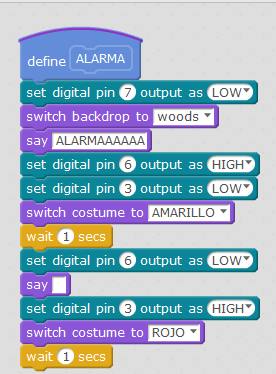
Mezcla en el mismo script:
- órdenes específicas de la placa arduino (set digital...)
- órdenes específicas del objeto que exista en mBlock (por defecto el oso panda) say .... switch costume to ....
- órdenes del fondo switch backdrop to ...
Con mBlock 5.0 YA NO SE PUEDE, pero tenemos unos trucos
MÉTODO UTILIZAR VARIABLES GLOBALES
Se pueden crear variables, en cualquier objeto, y las lee cualquier objeto,
Este método se utiliza con la opción EN VIVO
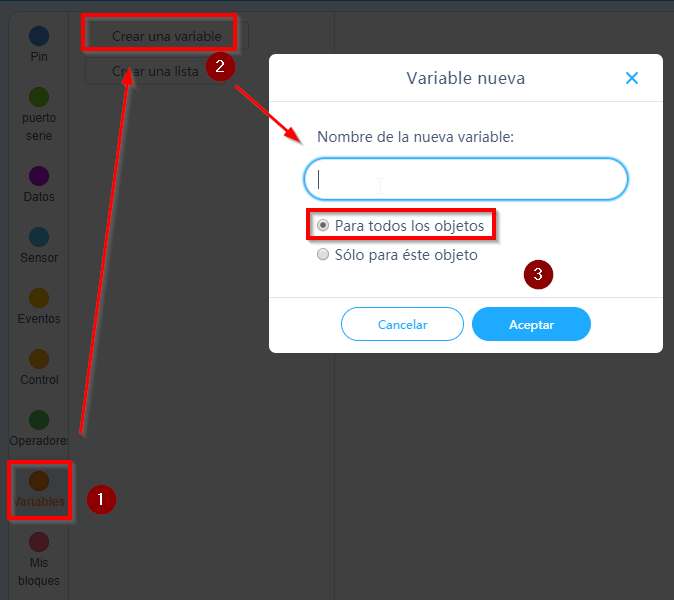
De esta manera si creamos una variable frase para todos los objetos:
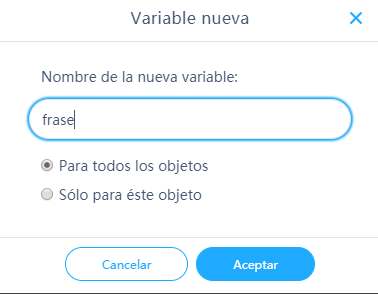
Podemos usarla en el robot
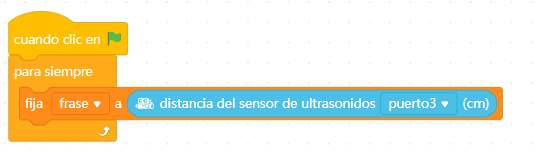
y el programa del objeto que queramos, en este caso el oso panda lo puede visualizar
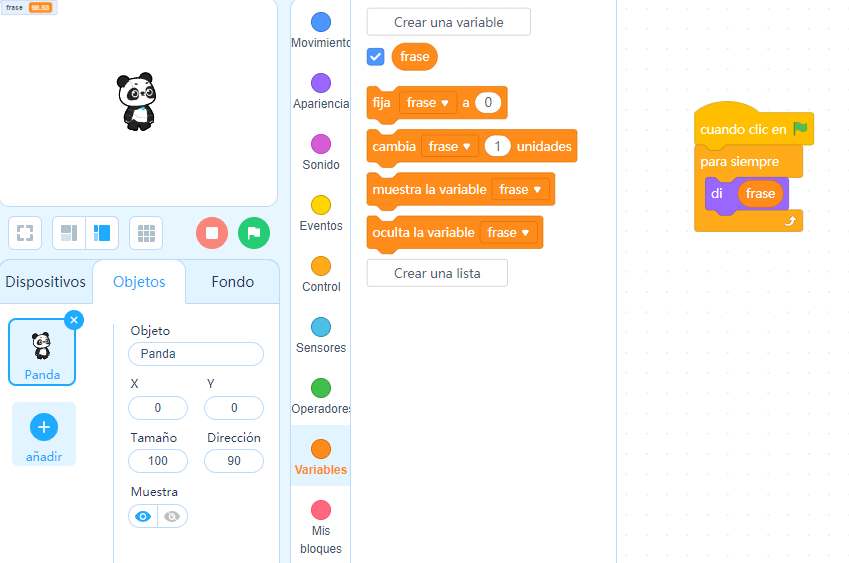
MÉTODO UTILIZAR MENSAJES
Cualquier objeto tiene a su disposición enviar mensajes a los otros
Este método se utiliza con la opción EN VIVO

MÉTODO EXTENSIÓN BROADCAST = TRANSMITIR MENSAJES
Este método se utiliza con la opción EN CARGA
Es parecido al anterior, hay que ir al + que hay abajo para instalar extensiones
Buscar la extensión "Broadcast" e instalarla

Se instala primero descargándola con el + aquí

Y luego añadir una vez descargada
Entonces aparecen unas nuevas instrucciones

y se instalan unas instrucciones extras parecidas a las anteriores pero más potentes
- En el mismo mensaje podemos transmitir valores asociados
- Funciona EN MODO CARGA
- Esto es muy útil pues hay instrucciones que sólo se pueden utilizar en modo CARGA, de esta manera podemos pasar valores de la placa electrónica a los objetos del ordenador (oso panda o lo que sea) simplemente teniendo conectado la placa con el ordenador.
El resto de objetos trabajan en modo vivo, es decir, si cambias un bloque, automáticamente se ven los efectos
A lo otros objetos TAMBIÉN hay que instalar la extensión BROADCAST
DESVENTAJA no se pueden transmitir mensajes de objetos a la placa. Sólo de la placa a los objetos
2. Circuitos sencillos
Un LED
Circuito un led directo
Para las siguientes propuestas, el montaje es colocar un diodo LED, en este caso no es necesario complicarse, podemos montarlo directamente en el Arduino uno colocando el ánodo (pata más larga) en el pin13 y el cátodo (pata más corta) en masa GND, elegimos el pin 13 por estar al lado de GND


No es una buena práctica conectar un diodo directamente sin pasar por una resistencia, pues en teoría es un cortocircuito, PERO si se hace no pasa nada pues Arduino tiene una limitación interna de 20mA
Luego lo recomendable es hacerlo pasar por una resistencia, usando la placa PROTOBOARD
Para el cálculo de la resistencia, debemos de tener en cuenta que la máxima corriente es 20mA, que la tensión de salida es 5V y que el diodo tiene una tensión Vd de funcionamiento, que depende de su color:
Rminima = (5V-Vd)/20mA
| Color | Vd | Resistencia mínima Ohm |
|---|---|---|
| Rojo | 1.8V | 160 |
| Amarillo | 3.2V | 140 |
| Verde | 3.2V | 90 |
Intermitente
Una propuesta muy sencilla
Solución

La captura está realizada con mBlock 3.0 no hay problema en hacerlo igual con mBlock 5.0
Aquí no hay ninguna interacción con el ordenador, este programa es candidato para ejecutarlo desde el Arduino como desde el ordenador. Vamos a añadirle algo de interacción con el ordenador en la siguiente propuesta.
Luz interactiva
Realizar un programa que al pulsar la tecla espacio, se encienda el led, un personaje cambie el disfraz, cambie el fondo y que suene un sonido
Solución
Con mBlock5.0 lo tienes aquí https://planet.mblock.cc/project/3265812
Declaramos una variable global ENCIENDE, es decir, estamos usando el método VARIABLE GLOBAL de https://libros.catedu.es/books/programa-arduino-con-mblock-scratch/page/programacion-mblock
En el objeto oso
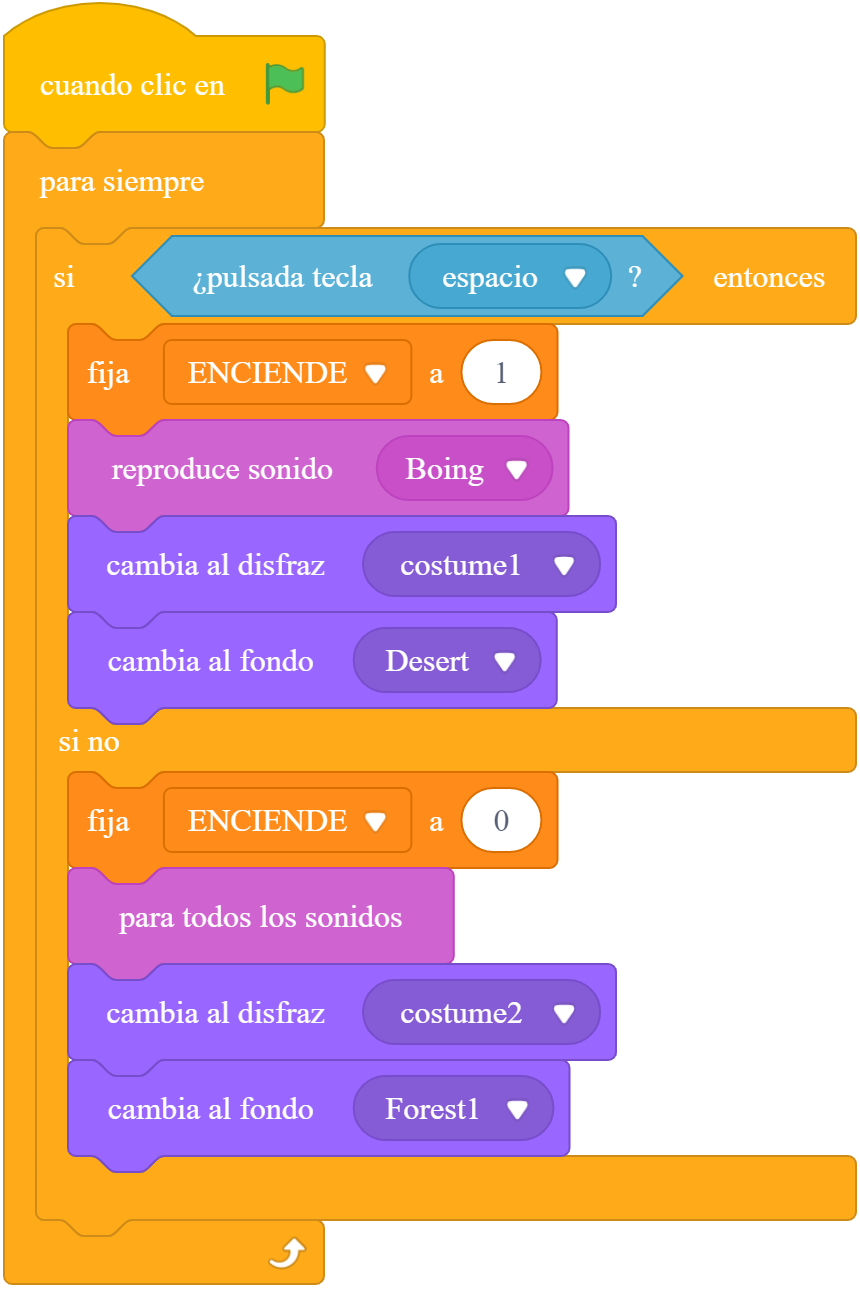
En el dispositivo Arduino
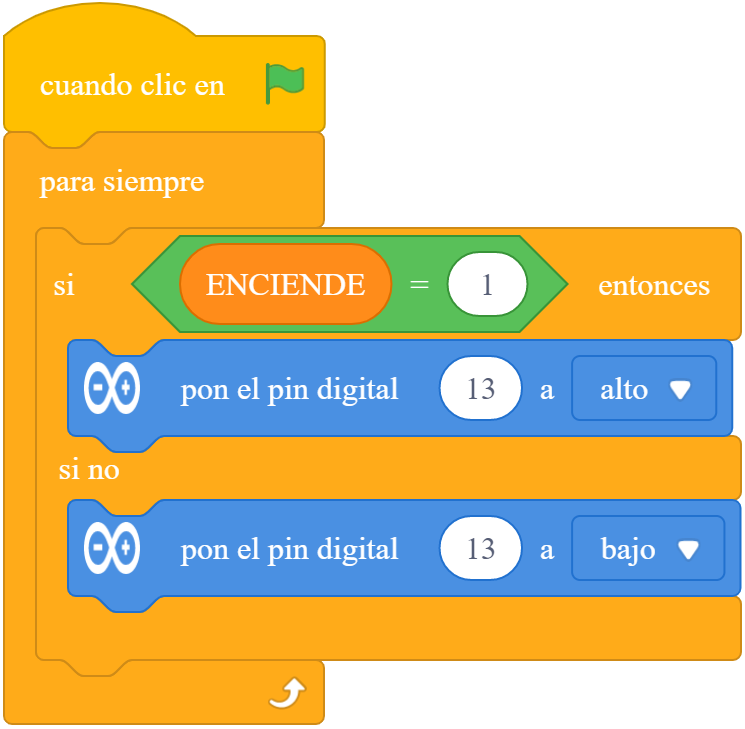
Con mBlock 3.0
Pulsador
Vamos a realizar el Arduino según el apartado CONEXIÓN CON ARDUINO que hemos visto en https://libros.catedu.es/books/programa-arduino-con-mblock-scratch/page/pulsadores
Propuesta
Realizar un programa con la configuración de pulsador pull down en la entrada analógica A0 y un led en el 13, que cuando se pulse se encienda el LED

Solución
Por la entrada A0 cuando el pulsador está abierto hay 0V y cuando está cerrado hay 5V, luego los valores que tiene A0 son 0 y 1023 respectivamente
Pero eso en teoría pues si realizamos este programa: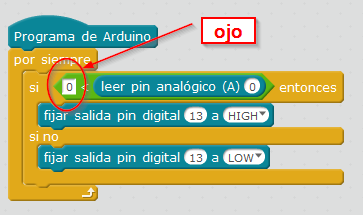
Ocurre esto:
¿Por qué? seguramente cualquier defecto de conexión o si la resistencia es elevada, la tensión se queda flotante y ya el valor de A0 no es 0 sino va tomando valores, que algunas veces son 0 pero otras veces no lo son (por eso no está totalmente iluminado)
Luego lo mejor es subir el valor, hemos puesto 500 y sí que funciona correctamente
Pulsador interactivo
Realizar un programa que al apretar el pulsador, que el panda cambie de disfraz, haga un sonido, diga algo ... además de encender el LED con la misma configuración que la propuesta anterior
Solución
Con mBlock5 lo tienes aquí https://planet.mblock.cc/project/3265849
Utilizaremos la técnica BROADCAST explicado en https://libros.catedu.es/books/programa-arduino-con-mblock-scratch/page/programacion-mblock
En el dispositivo ARDUINO
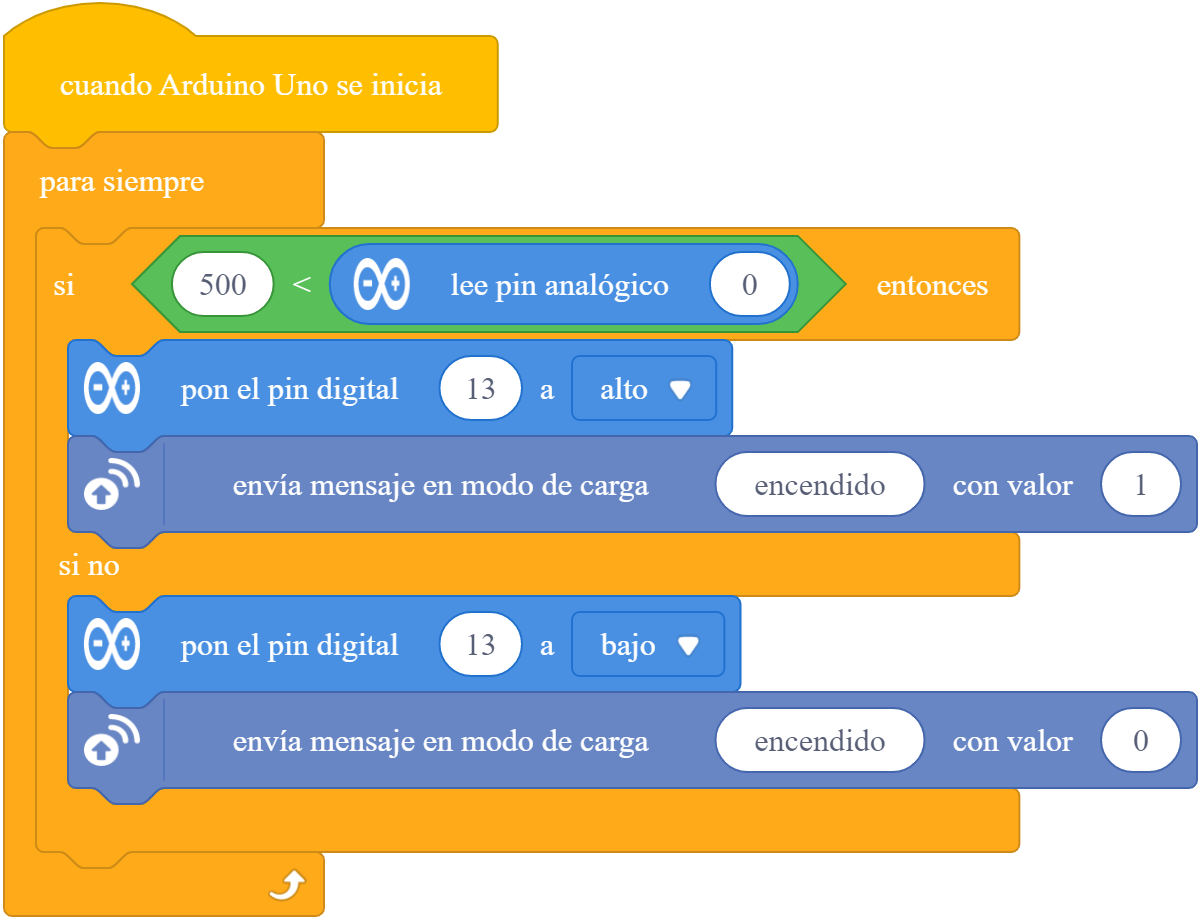
En el objeto PANDA
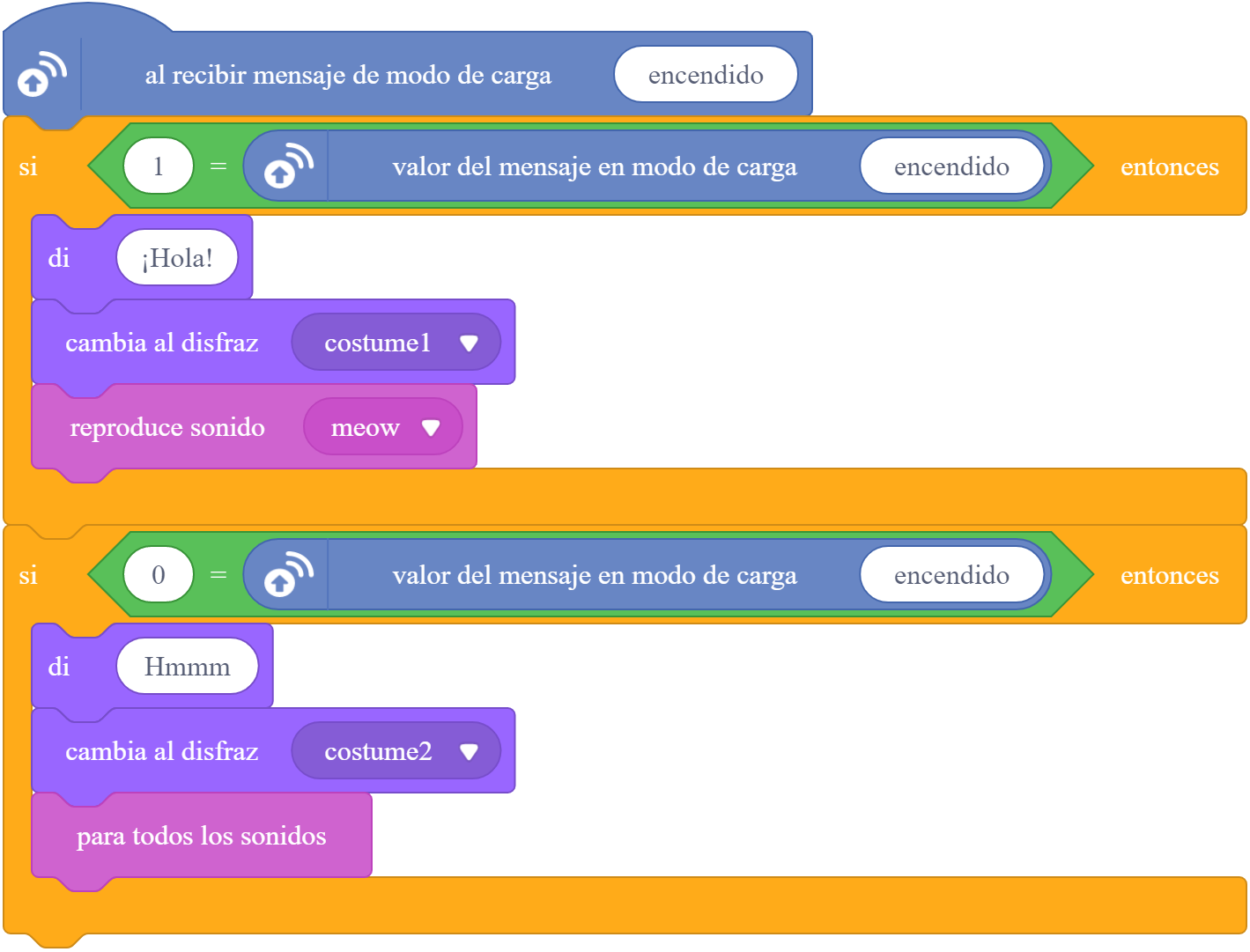
Nota: Se podría hacer un SI - SINO pero programando de esta forma abrimos la posibilidad de ampliar si el mensaje encendido es por ejemplo = 2
Con mBlock3
Condensador
Propuesta
Realizar un programa que cargue y descargue el condensador y que lo visualice en un objeto.
La propuesta es con un condensador de 10μF y dos resistencias de centenares de k, según lo visto en el módulo M1 esto nos dará un tiempo de carga y descarga de varios segundos
OJO CONECTAR EL PIN (-) DEL CONDENSADOR A GND peligro de explosión si se conecta al revés
Las resistencias colocarlos de tal manera que uno sea para la carga y otro para la descarga.
Un cable suelto, en uno extremo el terminal (+) del condensador y el otro suelto preparado para tocar la resistencia de carga o la de descarga.
Esta misma conexión que lo lea Arduino, por ejemplo por A0
 C
C
Visualizar la carga en un objeto Scratch que aumente de volumen:
Solución
Es muy sencillo, fija el tamaño de la pelota al valor del pin A0
Lo hemos hecho a través de una variable auxiliar "carga" para poder visualizar numéricamente su valor.
Con mBlock 5.0 lo tienes aquí https://planet.mblock.cc/project/3265873
En el dispositivo ARDUINO
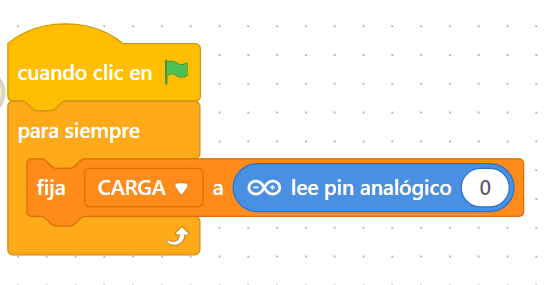
En el objeto PELOTA
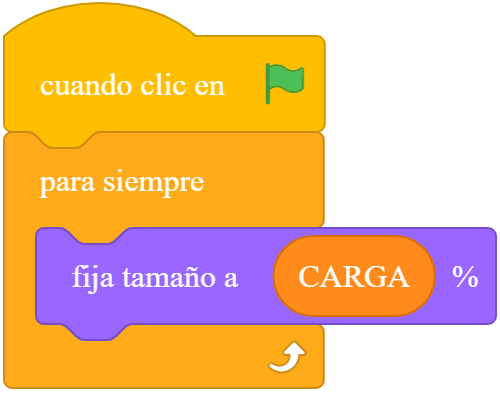
Con mBlock 3.0
AMPLIACIÓN
Se puede aprovechar esta experiencia para:
- Calcular el tiempo de carga, si coincide con la fórmula T = 5RC
- Visualizar que la pelota se carga o aumenta de volumen muy rápidamente al principio y luego lentamente, tal y como indica la teoría vista en el módulo 1
- Igualmente en la descarga
LDR
Realizar un programa que visualice en un objeto Scratch la cantidad de luz
El circuito es el siguiente: el LDR conectado a A0 y a una resistencia (la resistencia PULL UP para que la tensión que mida A0 sea la del LDR) y un objeto que aumente de tamaño según el valor de A0

Y el vídeo
Solución
El programa es el siguiente:
Lo hemos hecho a través de una variable auxiliar "carga" para poder visualizar numéricamente su valor.
Con mBlock 5.0 lo tienes aquí https://planet.mblock.cc/project/3265873
En el dispositivo ARDUINO
En el objeto PELOTA
Y en mblock 3.0
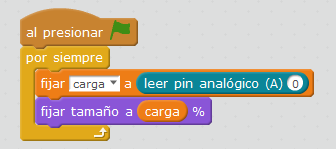
OOOPAAAA !!! ¡¡ Pero si es el mismo que el que acabamos de ver !!! El condensador
¡¡¡ vaya tontería !!!
Simplemente la variable carga no es el condensador sino la oscuridad
¿Que quieres cambiar el nombre de la variable carga por oscuridad? pues vale...
Ultrasonidos
Pues ya que estamos con la pelota, pues también seguimos: Hacer un programa que se hinche la pelota según la distancia.
En este caso, como la el sensor de ultrasonidos va desde 2 cm a 40cm, nuestra propuesta es que el tamaño se cambie multiplicado x50 ese valor, es decir "cambiar tamaño 50xdistancia", de no hacer esto, la pelota sale demasiado pequeña, o el objeto tendría que estar muy lejos para que se vea a un tamaño razonable.
La configuración la explicada en el módulo 1 es decir:
- Trigger en el pin 4
- Echo en el pin 3
Solución
Pues el programa es muy parecido a los anteriores:
Con mBlock 5
Opción sin instalar extensión
lo tienes aquí https://planet.mblock.cc/project/3266117
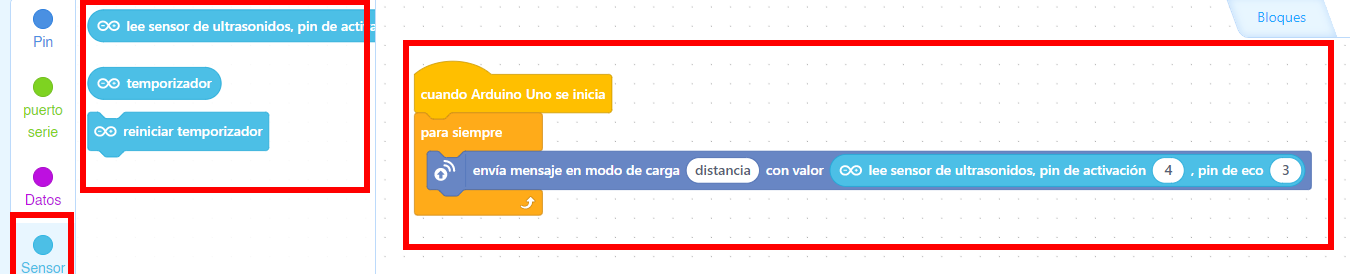
Estas funciones SOLO FUNCIONAN EN MODO CARGA
Opción instalando extensión
lo tienes aquí https://planet.mblock.cc/project/3266063
Pulsamos abajo al +
Buscamos extensiones para el sensor de ultrasonidos HC-SR04, nosotros hemos elegido esta
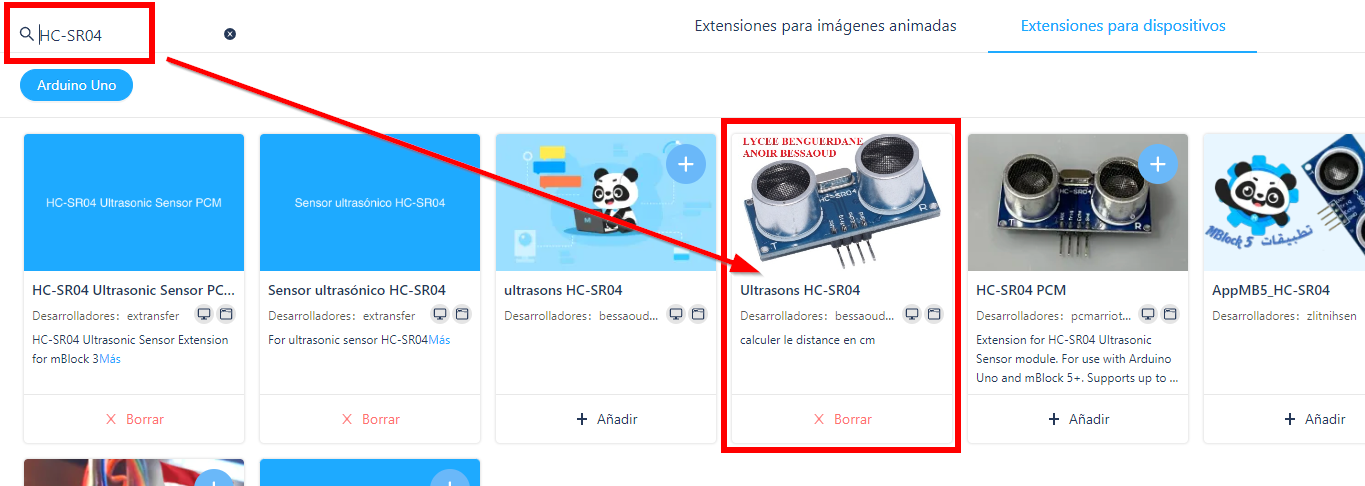
Que instala estas instrucciones
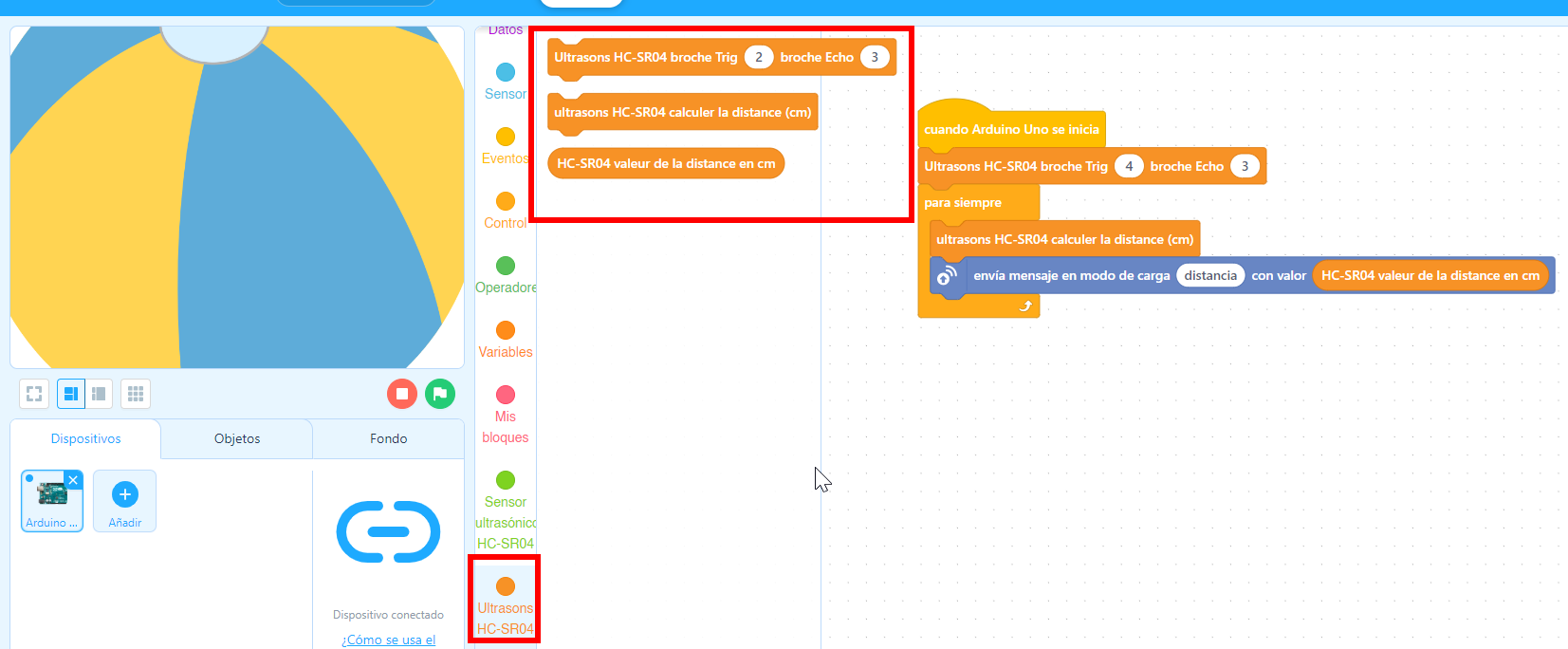
Esta extensiones (como suele pasar cuando instalamos una extensión) SOLO FUNCIONAN EN MODO CARGA
Luego para transmitir la distancia al objeto pelota, utilizamos la técnica de BROADCAST que vimos en https://libros.catedu.es/books/programa-arduino-con-mblock-scratch/page/programacion-mblock
Al dispositivo ARDUINO el programa es sin la extensión

Con la extensión
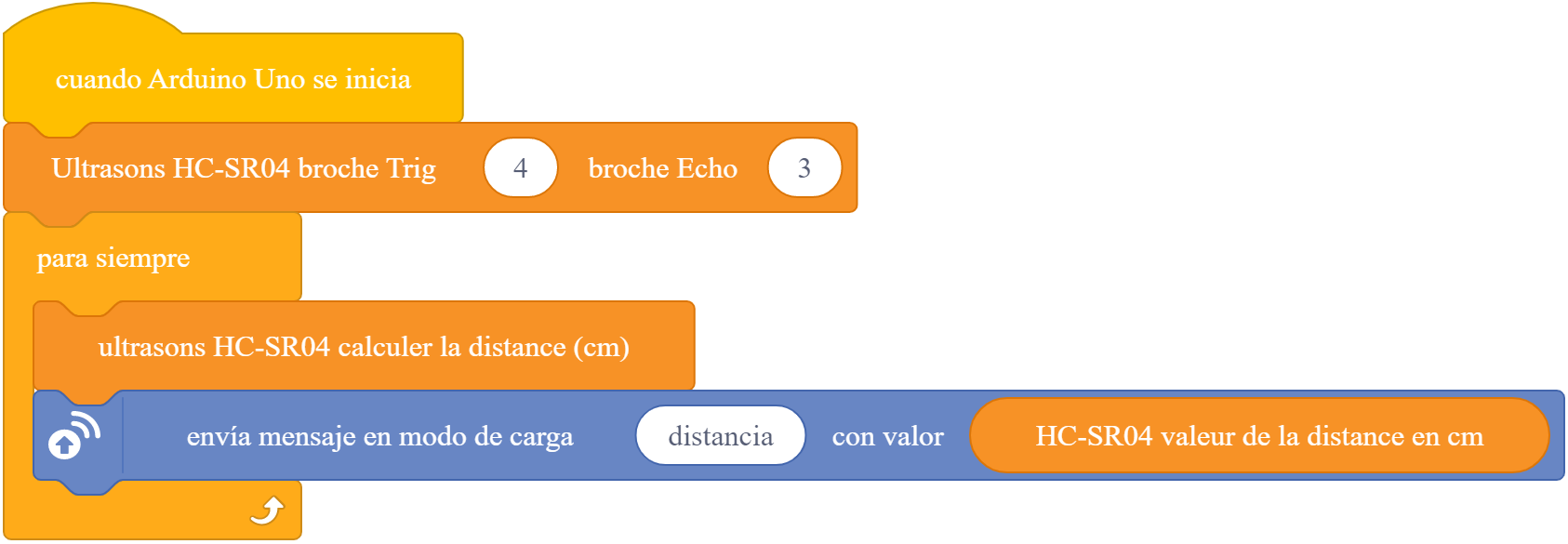
En el objeto PELOTA el programa es

Con mBlock3
3. Circuitos más complejos
LDR y LEDs
Esta vez vamos a convertir el valor de la oscuridad en luces. Para ello necesitaremos:
- 10 LEDs puestos consecutivamente. Vamos a colocarlos desde el pin 2 hasta el 11 (el 1 está ocupado con TX)
- El sensor LDR conectado a una entrada A0
- El programa tiene que convertir el valor de la oscuridad que detecta el LDR en las luces, es decir cuanto más oscuridad más luces encendidas.

Solución
La solución tiene la complejidad del valor de la entrada A0 que va desde 0 hasta 1023 por lo tanto, hay que convertir estos valores en valores del 2 al 11 correspondiente a los LEDs
La forma más sencilla de reconvertir A0 es dividir A0 entre 100 y sumarle un 1 de esta manera aproximadamente los valores se convierten en 2-11
Otra opción es en mBlock 5.0 existe la función MAPEAR y por lo tanto también se puede hacer

En vez de
Si el LED se menor que el valor A0 ya convertido, encender el LED, en caso contrario apagarlo
La captura es en mBlock 3 pero En mBlock5 es igual
Condensador y LEDs
En este ejercicio proponemos que se visualice la carga y descarga de un condensador, no en una pelota que se hincha como hicimos en el M2, sino con las luces
Utilizaremos el formato de LEDs del ejercicio anterior, es decir 10 LEDs colocados consecutivamente, desde el pin 2 hasta el pin 11
La entrada será el condensador por el pin A0

El cable verde suelto será el que manualmente tocará a una resistencia o a otra para que se cargue o descargue:
Solución
Pero si... ¡¡¡ ES EL MISMO QUE EL EJERCICIO ANTERIOR LDR Y LEDS !!!
Timbre
Proponemos que cuando se pulse el pulsador, se enciendan las luces y toque un tono
El pulsador con la resistencia pull-down al pin A0 y las luces como en los ejercicios anteriores del 2 al 11, el altavoz en el pin 13:

Solución
Después de poner pin digital alto o bajo, se puede añadir un pequeño retraso para hacer más lento el efecto de encender consecutivamente los leds.
Piano invisible con Ultrasonidos
Podemos conectar el sensor de ultrasonidos como queramos, en estos apuntes vamos a realizar el criterio de:
- Trigger en el pin 4
- Echo en el pin 3
La conexión sería así:
la instrucción de mBlock sería la siguiente:
![]()
Con el altavoz PC
No vamos a hacer un arpa láser estilo Jean Michel Jarre, pero con ultrasonidos, se puede hacer algo parecido. ¿Te atreves? El programa tiene que convertir la distancia en notas musicales.
Las notas musicales están en formato americano (en vez de do-re-mi-..) van desde la nota 48 a la nota 72 por lo tanto hay que convertir la distancia en esas notas musicales (pon la voz a tope, que se oye bajo)
Solución
- Ponemos un tope de 100 cm para que empiece a tocar, de lo contrario nos vuelve un poco locos, pues no pararía.
- Recomendamos utilizar la notación musical es americana, en forma de números, pues la conversión es muy fácil
Solución con mBlock5.0
Lo tienes aquí https://planet.mblock.cc/project/3267795
En el dispositivo ARDUINO

En el objeto (que hemos cambiado el oso panda por un músico). Hemos añadido la extensión MUSICA
Y tenemos ya una instrucción de tocar la nota en formato americano que es numérico
El programa queda en el objeto :
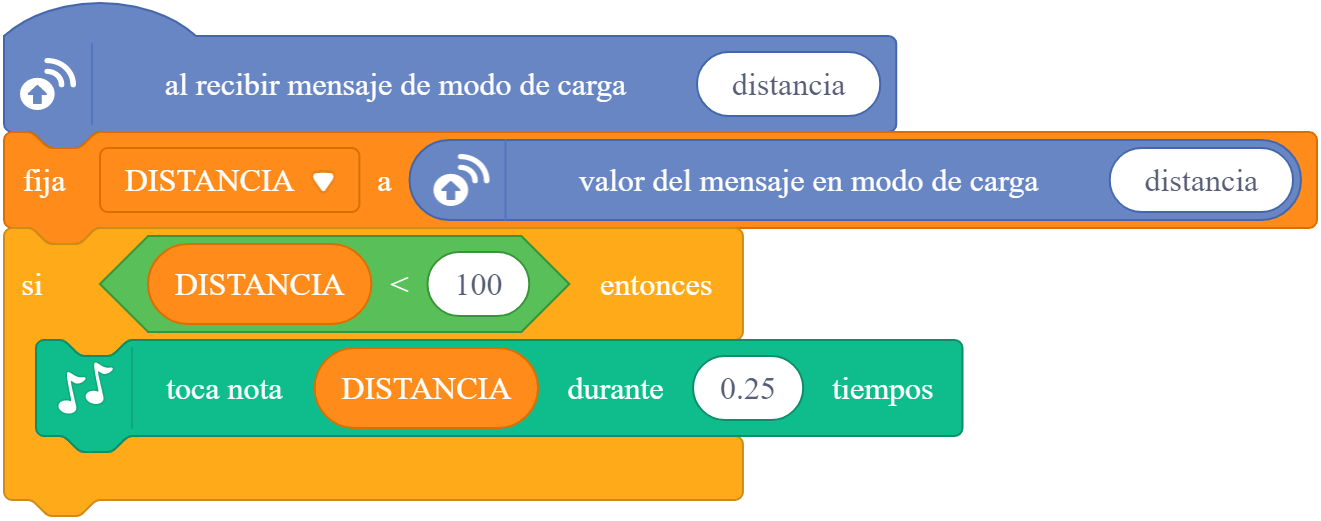
Solución con mBlock3.0
Con el altavoz Arduino
Bueno y ahora ¿por qué no repetimos el ejercicio anterior pero nos independizamos del ordenador? conectamos un altavoz en el pin 13 por ejemplo y que suene la música:

No suena de maravilla, porque no es el altavoz del PC, ni tampoco tiene potencia, pero algo es algo...
Solución
La solución es muy parecida al ejercicio anterior, simplemente hay que cambiar la instrucción de tocar nota por reproducir tono
El programa queda así: (la captura es en mBlock3.0 pero en mBlock5.0 es igual)
Ampliación: Juegos de luces
Construcción
En este caso pondremos 8 LEDs uno a continuación del otro, los ANODOS (+)(pata más larga) conectados al pin 13 - 12 -11 -10 -9 -8 -7 -6 y los CATODOS (-) (pata corta) todos al GND


Juego luces - 1
Se van encendiendo y apagando los 8 leds secuencialmente como en el vídeo:
Solución
La captura está realizada en mBlock 3.0 pero en mBlock 5.0 es igual

Juego de luces -2
En este caso da la sensación que es una luz la que se desplaza:
Solución
La captura está realizada en mBlock 3.0 pero en mBlock 5.0 es igual

Se ha optado por utilizar una variable que controle el tiempo T por comodidad
Coche fantástico
¿Conoces las luces del coche fantástico? si la respuesta es afirmativa, tienes la edad perfecta para este curso 😁 sino, tendrás que ver este vídeo para ver el coche fantástico
Al grano. Nuestro reto es que hagas es lo siguiente:
Solución
La captura está realizada en mBlock 3.0 pero en mBlock 5.0 es igual.
Hemos puesto un tiempo T pequeño para que dar una sensación de movimiento.

Coche fantástico plus
Bueno, y si pedimos que tenga alguna interacción con elementos de Scratch:
Solución
Con mBlock 5.0 la cosa se complica pues con mBlock 3 podemos intercambiar instrucciones de objeto con dispositivo pero aquí no, luego el programa lo tienes aquí https://planet.mblock.cc/project/3267890
El objeto oso panda es el que lleva la batuta de T y n
Estamos utilizando la técnica de VARIABLES GLOBALES de https://libros.catedu.es/books/programa-arduino-con-mblock-scratch/page/programacion-mblock
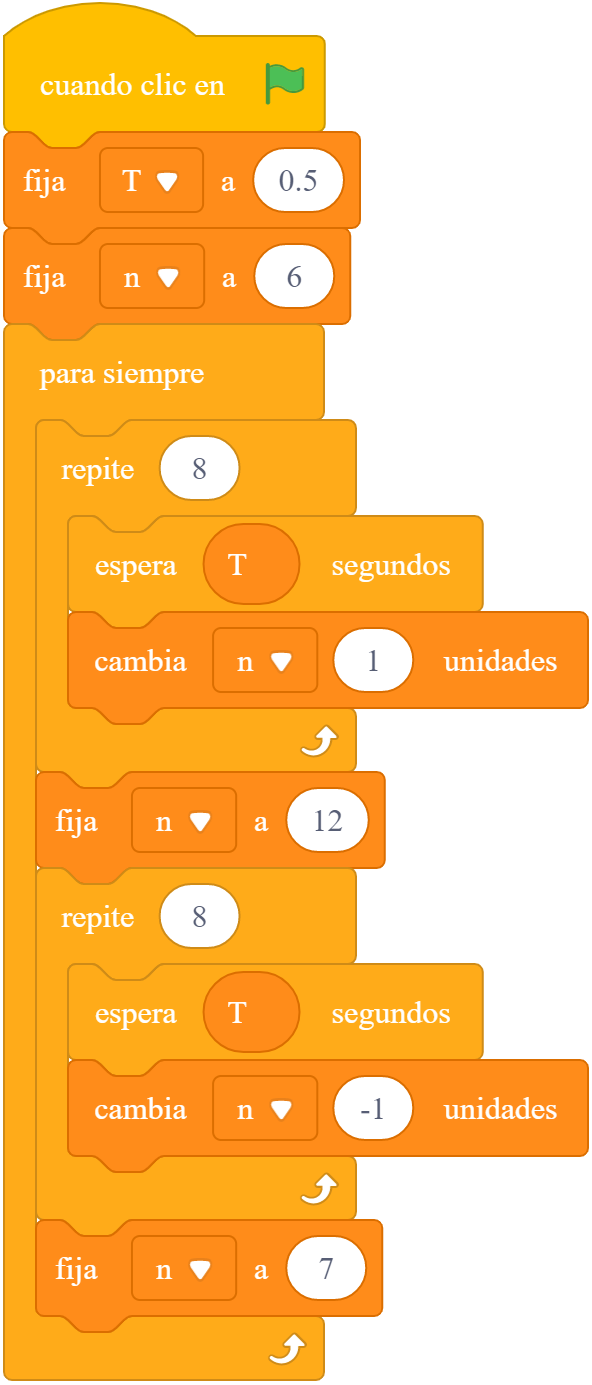
Cada objeto bombilla, tiene un programa, por ejemplo el objeto 6 es (la captura es de mBlock3 pero mBlock 5 es igual)
El dispositivo ARDUINO tiene este programa
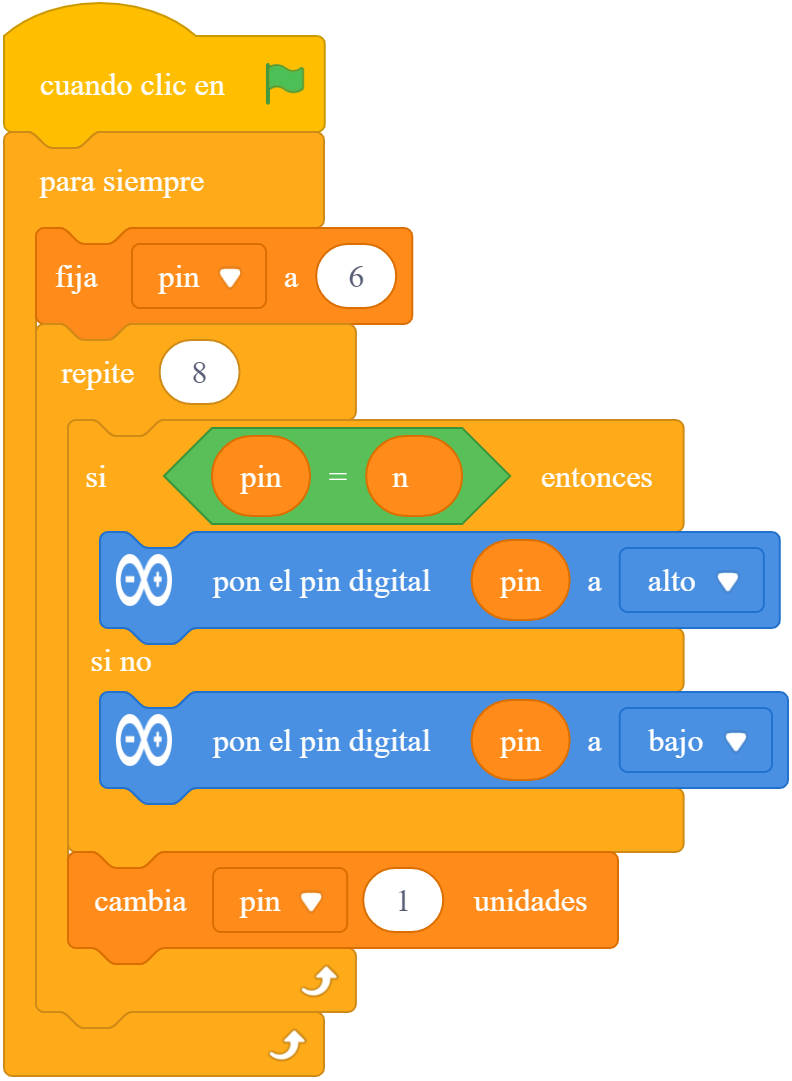
Hace un barrido y si es el pin que hay que encender, se enciende, sino se apaga
Si T es menor de 0.5 empieza a descoordinarse el Arduino y los objetos del ordenador, pues hay retraso en la comunicación seria. Si queremos bajar tiempos, habría que trabajar con CARGA no en VIVO y habría que utililizar la técnica de BROADCAST
En mBlock 3. El programa te lo puedes descargar aquí y es como el anterior
Pero con 8 objetos bombillas, con su programa correspondiente, por ejemplo el 6
Otra propuesta de coche fantástico
Esto lo mostramos como ejemplo de hacer el coche fantástico con un potenciómetro, OJO la solución está realizada en código, no en mBlock, pero los vídeos explican muy bien cómo hay que conectar todo:
Solución
La solución está con capturas de mBlock3. A estas alturas ya sabes las modificaciones a realizar en mBlock5
Si lo realizas en mBlock5 y lo publicas, please, pásanos el link y lo ponemos aquí
Semáforo
Realizar un semáforo de luces para coches y peatones:
Fuente: Con permiso del autor David López Morte (IES Los Albares)la propuesta del semáforo aquí.


Solución
La solución está con capturas de mBlock3. A estas alturas ya sabes las modificaciones a realizar en mBlock5
Si lo realizas en mBlock5 y lo publicas, please, pásanos el link y lo ponemos aquí

Propuesta 2 con código
Solución
La solución está con capturas de mBlock3. A estas alturas ya sabes las modificaciones a realizar en mBlock5
Si lo realizas en mBlock5 y lo publicas, please, pásanos el link y lo ponemos aquí
Otras propuestas
Pues ahora que sean dos luces las que se muevan, los dos en sentidos opuestos:
Solución
La solución está con capturas de mBlock3. A estas alturas ya sabes las modificaciones a realizar en mBlock5
Si lo realizas en mBlock5 y lo publicas, please, pásanos el link y lo ponemos aquí

Puedes descargarte el programa aquí.
Ampliación: Sensor parking
Con un led
Realizar un programa que la luz parpadee más deprisa cuanto más cerca esté el obstáculo.

Solución
El truco está en el tiempo de espera en la intermitencia
Si el tiempo de espera es proporcional a la distancia, parpadeara más cuanto más cerca.
La captura está en mBlock3.0 pero es igual en mBlock 5.0
Con altavoz Arduino
Realizar un programa que realice pulsos el altavoz en función de la distancia al objeto. Cuanto más cerca mayor es la frecuencia de los pulsos

Solución
¡¡¡ Es exáctamente igual que el caso anterior !!! Sensor parking con led lo único es cambiar la luz POR UN ALTAVOZ !!!
Con altavoz del PC
Ahora que no sea un altavoz suelto, sino el del ordenador
Si te fijas va más lento que el caso anterior por su dependencia con el ordenador.
Solución
Con mBlock 5.0
Si la instrucción de ultrasonidos funcionase en vivo, se podría utilizar la técnica de variables globales y sería sencillo el programa, pero esta instrucción SOLO FUNCIONA EN CARGA luego utilizaremos la técnica BROADCAST de https://libros.catedu.es/books/programa-arduino-con-mblock-scratch/page/programacion-mblock
Luego el programa lo tenemos aquí https://planet.mblock.cc/project/3271155
En el dispositivo ARDUINO
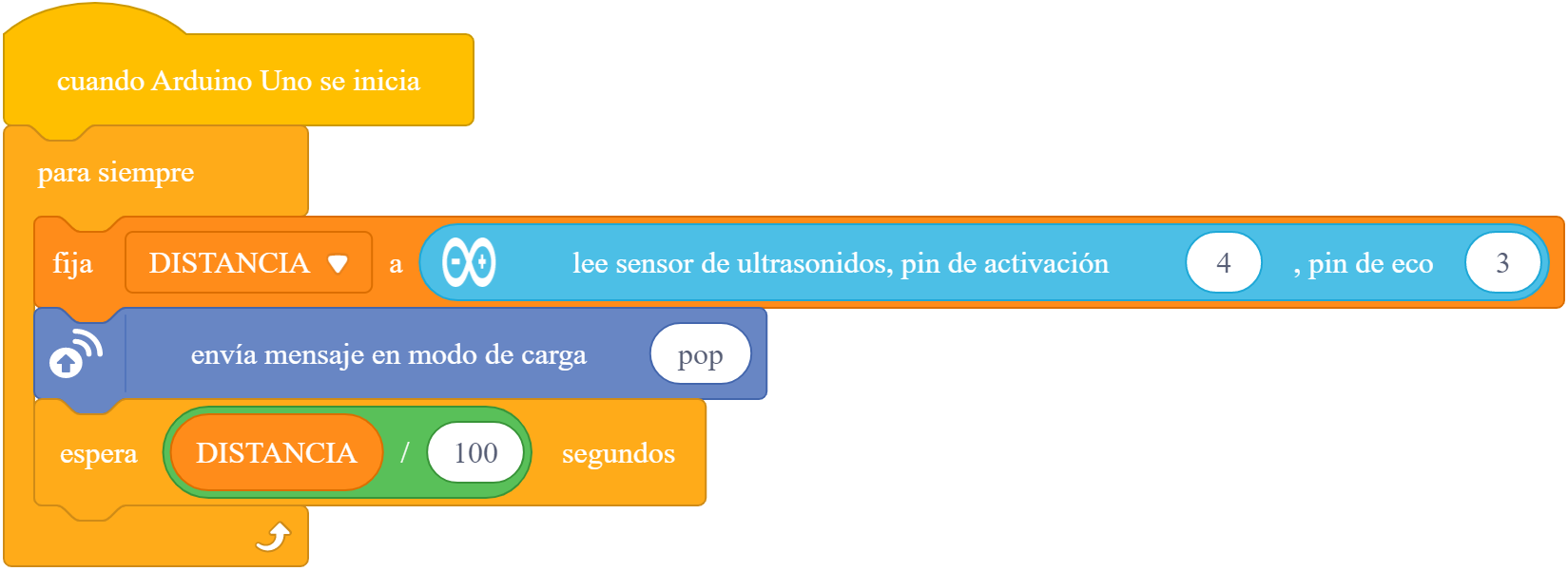
Y en el objeto tambor
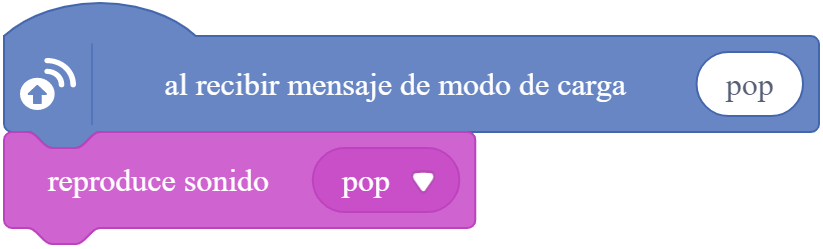
Con mBlock3.0

Si quieres este programa te lo puedes descargar aquí.
Con varios leds
Realizar un programa que visualice con las luces la distancia que detecta el sensor de ultrasonidos.
Cuanto más lejos, más luces encendidas:

Solución
- una variable X que vaya desde 1 hasta 8
- si la distancia es menor que X que encienda la luz, en caso contrario que lo apague.
- Como los LEDs están conectados desde el pin 6 al 13 hay que realizar una sencilla conversión: pin= X + 5
La captura está en mBlock 3.0 pero en mBlock 5.0 es igual

Muro
Créditos
- 2017 por Javier Quintana Peiró CATEDU.
- 2024 actualizado a mBlock 4.0 por Javier Quintana CATEDU
Cualquier observación o detección de error en soporte.catedu.es
Los contenidos se distribuyen bajo licencia Creative Commons tipo BY-NC-SA excepto en los párrafos que se indique lo contrario.



Lenguaje de programación
El Arduino se puede programar
- Por bloques (mBlock , Echidna, Scratch, SteamMakerblocks, Blocky....)
- Por código principalmente Arduino IDE
Guía de los lenguajes de programación para robots
Tenemos un grupo Telegram Robótica Educativa en Aragón, https://t.me/roboticaeducativaaragon