4 - Posibilidades avanzadas
El objetivo de este capítulo es compartir con vosotros/as alguna cuestión de mayor dificultad a las ya planteadas en capítulos anteriores. Concretamente vamos a ver como montar un alojamiento en la nube similar a lo que vendría siento Google Drive. También vamos a usar nuestra Raspberry Pi para gestionar la domótica de nuestra vivienda y, para terminar, haremos uso de los distintos pines de nuestra Raspbery Pi
4.1 NextCloud. Tu nube personal
![]()
Imagen obtenida de https://es.m.wikipedia.org/wiki/Archivo:Nextcloud_Logo.svg
Esta herramienta sirve para...
Una vez mas vamos a recurrir a la wikipedia:
Nextcloud es una serie de programas cliente-servidor que permiten la creación de servicios de alojamiento de archivos. Su funcionalidad es similar al software Dropbox, aunque Nextcloud es en su totalidad software de código abierto. Nextcloud permite a los usuarios crear servidores privados. Su modelo de desarrollo abierto permite añadir y/o modificar la funcionalidad del software del servidor en forma de aplicaciones.
https://es.wikipedia.org/wiki/Nextcloud
Y según lo anterior me podréis decir que en el apartado 3.9 File Browser. Explorador de ficheros en remoto ya nos hemos dotado de una muy buena herramienta web que nos permite gestionar nuestros ficheros en remoto. En esta ocasión vamos a ver una herramienta que mejora las posibilidades (y aumenta la complejidad) de la anterior ya que cuenta entre otras con las siguientes características:
- Los archivos Nextcloud son almacenados en estructuras de directorio convencionales y se pueden acceder a través del protocolo WebDAV si es necesario.
- Los archivos son encriptados en la transmisión y opcionalmente durante el almacenamiento.
- Los usuarios pueden manejar calendarios (CalDAV), contactos (CardDAV), tareas programadas y reproducir contenido multimedia (Ampache).
- Permite la administración de usuarios y grupos de usuarios (vía OpenID o LDAP) y definir permisos de acceso.
- Posibilidad de añadir aplicaciones (de un solo clic) y conexiones con Dropbox, Google Drive y Amazon S3.
- Disponibilidad de acceso a diferentes bases de datos mediante SQLite, MariaDB, MySQL, Oracle Database, y PostgreSQL.
- Disponibilidad de un software llamado Nextcloud box basado en Raspberry Pi que funciona en Ubuntu Core.
- Posibilidad de integrar los editores en línea ONLYOFFICE mediante la aplicación oficial.
https://es.wikipedia.org/wiki/Nextcloud
que permiten dar un paso adelante con respecto a la solución que con anterioridad habíamos visto.
Web de proyecto y otros enlaces de interés
Página web obficial del proyecto: https://nextcloud.com/
Repositorio de código: https://github.com/nextcloud/server
Instrucciones de instalación en un servidor propio: https://nextcloud.com/install/#instructions-server
Despliegue
Como en ocasiones anteriores vamos a hacer con docker-compose para ello accedemos al terminal y escribimos
cd $HOME
mkdir nextcloud
cd nextcloud
nano docker-compose.ymly dentro del fichero escribiremos el siguiente contenido (adaptado de https://github.com/nextcloud/all-in-one/blob/main/docker-compose.yml):
version: "3.7"
volumes:
nextcloud_aio_mastercontainer:
name: nextcloud_aio_mastercontainer # This line is not allowed to be changed
services:
nextcloud:
image: nextcloud/all-in-one:latest
restart: always
container_name: nextcloud-aio-mastercontainer # This line is not allowed to be changed
volumes:
- nextcloud_aio_mastercontainer:/mnt/docker-aio-config # This line is not allowed to be changed
- /var/run/docker.sock:/var/run/docker.sock:ro # May be changed on macOS, Windows or docker rootless. See the applicable documentation. If adjusting, don't forget to also set 'DOCKER_SOCKET_PATH'!
ports:
- 80:80 # Can be removed when running behind a web server or reverse proxy (like Apache, Nginx and else). See https://github.com/nextcloud/all-in-one/blob/main/reverse-proxy.md
- 8080:8080
- 8443:8443 # Can be removed when running behind a web server or reverse proxy (like Apache, Nginx and else). See https://github.com/nextcloud/all-in-one/blob/main/reverse-proxy.md
como en ocasiones anteriores, para guardar los cambios pulsaremos control + x y cuando nos pregunte aceptaremos.
Si algún otro servicio está utilizando los puertos que en este servicio vamos a utilizar se generará un conflicto y puede que ninguno de los servicios funcione o, mas probable, el último que pongamos en marcha.
Para usar un puerto diferente puedes cambiar el valor que aparece ANTES de los : por un valor que no esté en uso. También puedes acceder al directorio dónde se encuentra el otro servicio y ejecutar docker-compose down.
Posteriormente ponemos en marcha los contenedores con docker-compose up -d (le costará un buen rato).
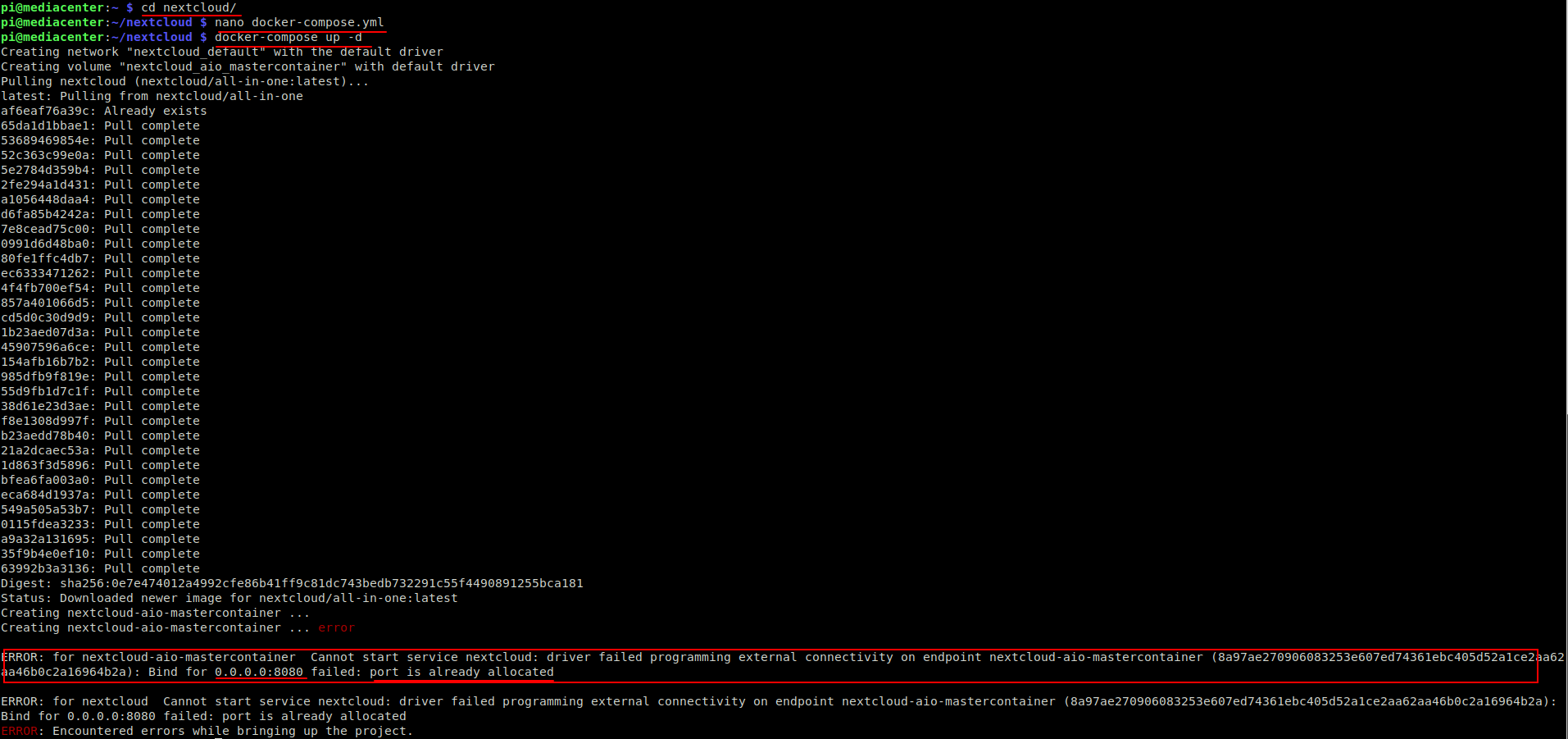
Elaboración propia
En esta ocasión el despliegue nos ha fallado por lo que comentaba en la advertencia anterior. El mensaje de error nos indica que el puerto 8080 ya está en uso. Con docker ps voy a ver qué contenedores están utilizando qué puertos:
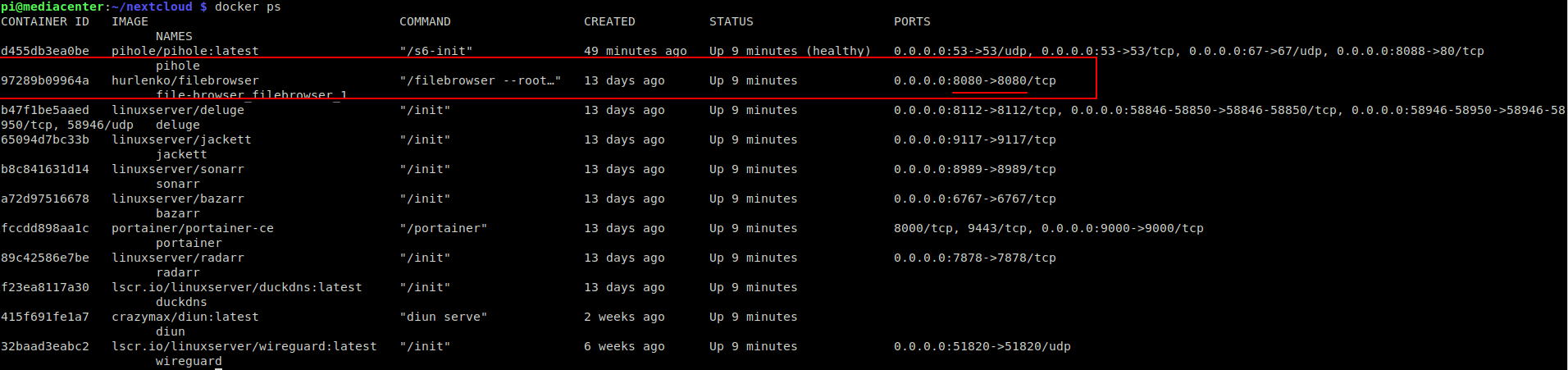
Elaboración propia
Aquí veo que el servicio pihole es quién está usando actualmente ese puerto. Posibles soluciones:
- Detener pi-hole: accedo al directorio dónde está pi-hole y ejecuto
docker-compose down. Esto hará que deje de funcionar. - Cambiar en el fichero docker-compose.yml de nextcloud la línea que dice 8080:8080 por, por ejemplo, 8081:8080. Nosotros optaremos por esta segunda opción
tomemos la decisión que tomemos deberemos volver a acceder al directorio de nextcloud y ejecutar docker-compse up -d. Si ahora va bien veremos algo como:

Elaboración propia
Si accedemos, como en ocasiones anteriores, a http://IP:PUERTO siendo en mi caso http://192.168.0.201:8081 veremos un mensaje de error que nos indica que utilicemos el protocolo https así pues accederemos a https://IP:PUERTO que en mi caso es https://192.168.0.201:8081 es probable que nos aparezca un mensaje de certificado no válido, no hay problema, le indicamos que continúe y veremos algo como:
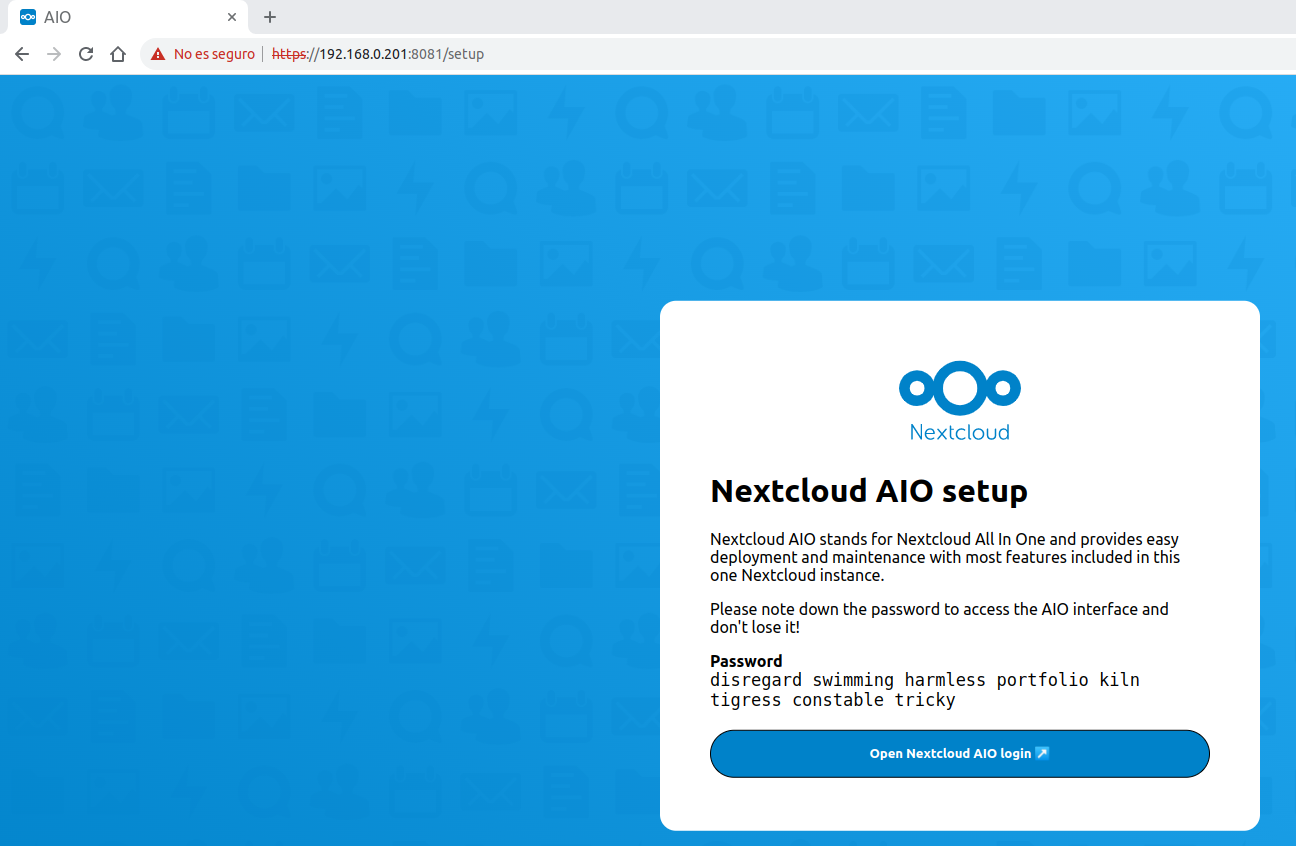
Elaboración propia
Funcionamiento
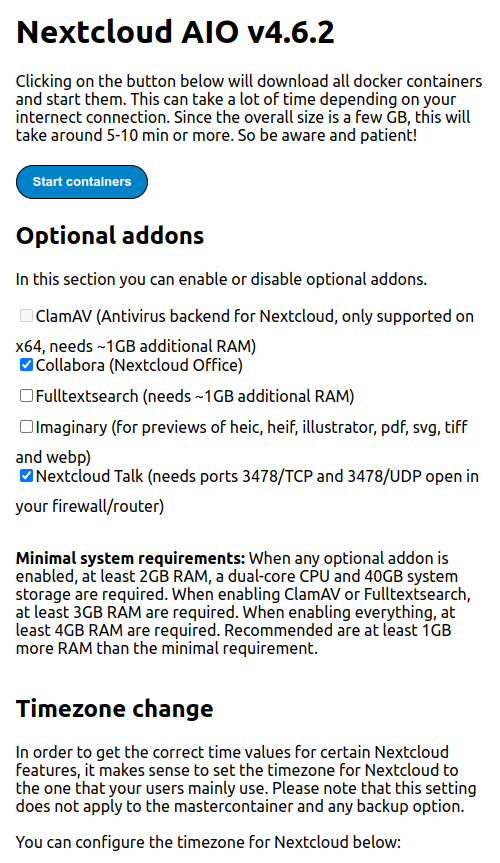
Anora la contraseña que genera nextcloud. En mi imagen fíjate que aparece justo encima del botón. Tras acceder llegaremos a una pantalla como la siguiente en la cual deberemos indicar un dominio que apunte a nuestra raspberry pi (podemos utilizar alguno que hayamos configurado con duckdns)
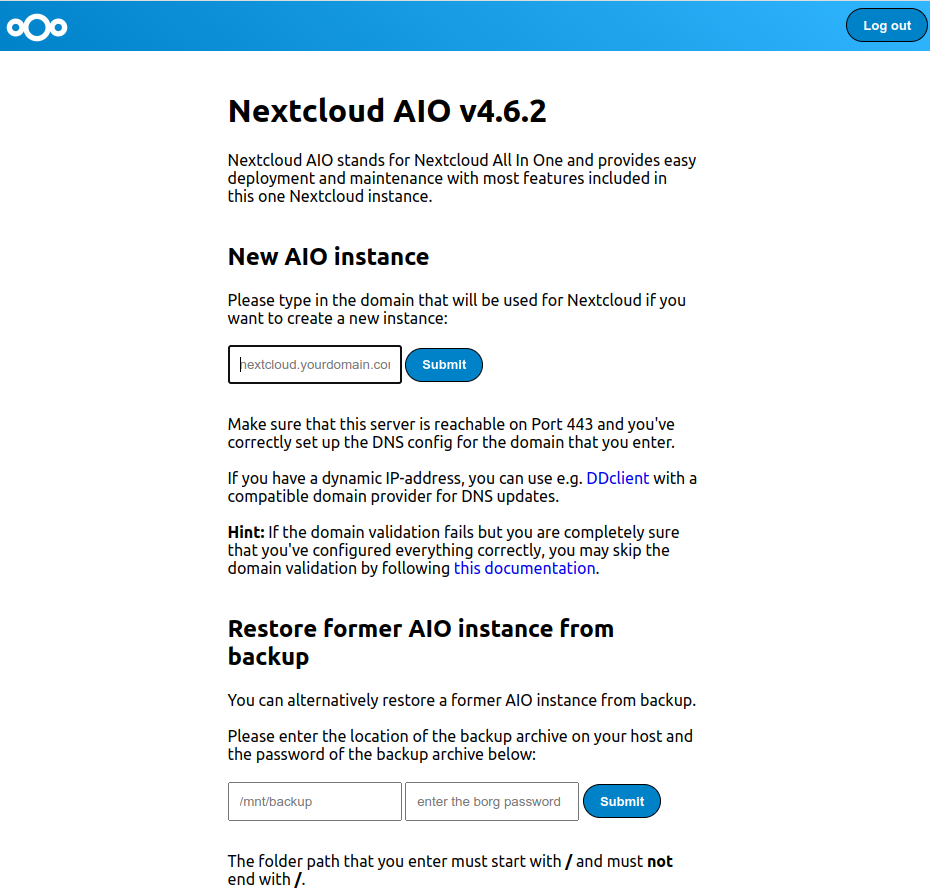
Elaboración propia
Podemos trampear este paso si al final de nuestro fichero docker-compose.yml añadimos:
environment:
SKIP_DOMAIN_VALIDATION: 'true'Para recargar los cambios en el fichero docker-compose.yml deberemos tirar el servicio con docker-compose down y volver a levantarlo con docker-compose up -d. Si volvemos a acceder a la url anterior veremos algo como:
Elaboración propia
Si pulsamos en start containers (le costará un buen rato) se pondrá en marcha el servicio y ya podremos disfrutar del mismo.
Quizás una Raspberry Pi modelo 4 de 4 GB, como es mi caso, resulta insuficiente para un servicio tan potente como el descrito. Si ejecutamos el comando htop veremos que está saturada a mas no poder.
4.2 Haciendo uso del pinout
Llegó el momento de mancharnos las manos
Todos los montajes deben hacerse con la Raspberry Pi apagada.
Cuestiones previas
Antes de comenzar a trabajar con la raspberry Pi necesitamos tener claras algunas cuestiones como el pinout del modelo con el que estemos trabajando. Así, el pinout del modelo 4 es el siguiente:
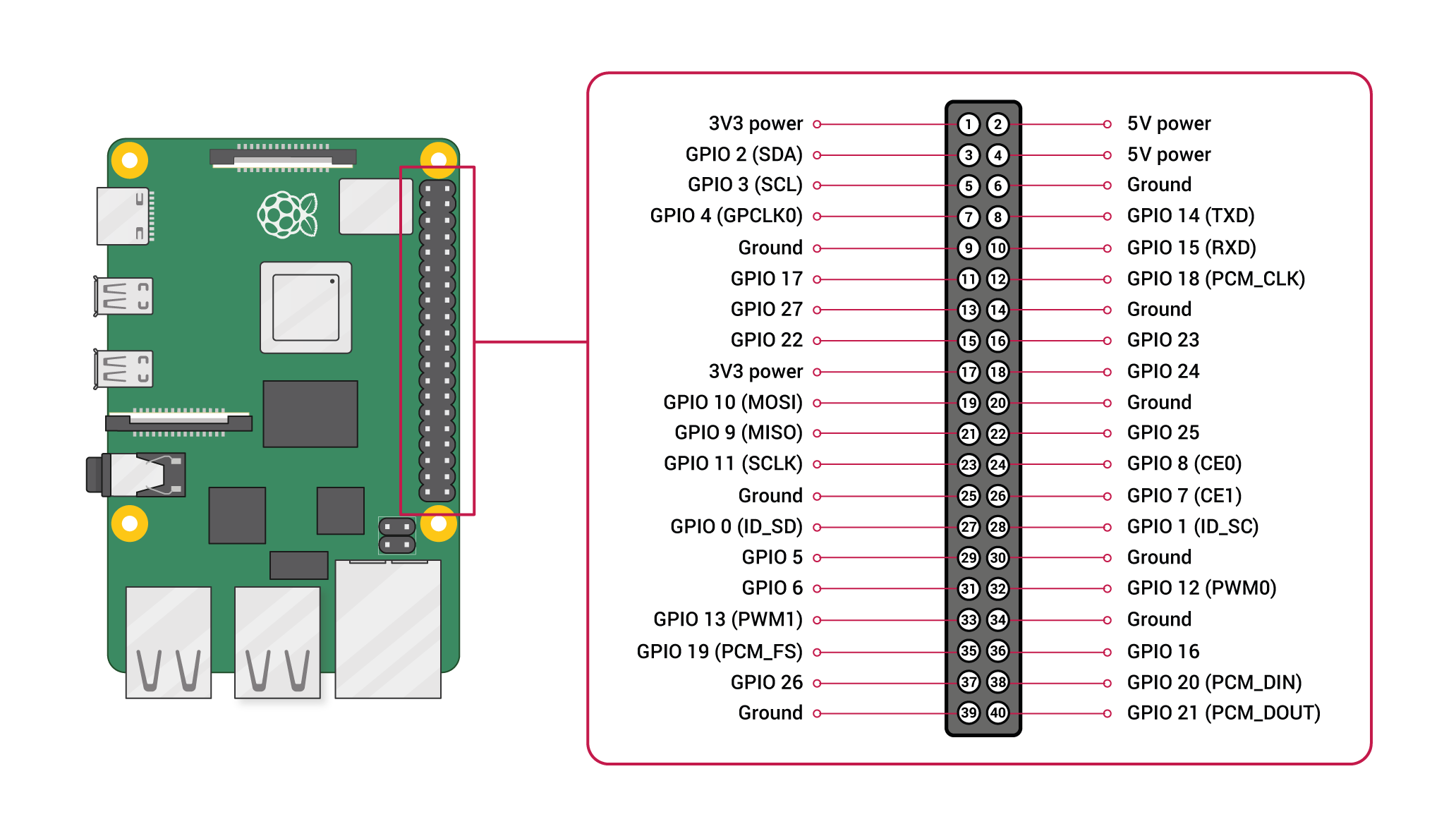
Imagen obtenida de https://www.raspberrypi.com/documentation/computers/raspberry-pi.html
Una cosa que han hecho muy bien desde Raspberry Pi es mantener la retrocompatibilidad entre modelos así el pinout del modelo 2 B es el mismo que es de este modelo.
Para las prácticas que realizaré a continuación utilizaré una Raspberry Pi modelo 2 B. Las mismas deberían ser totalmente compatibles con modelos actuales.
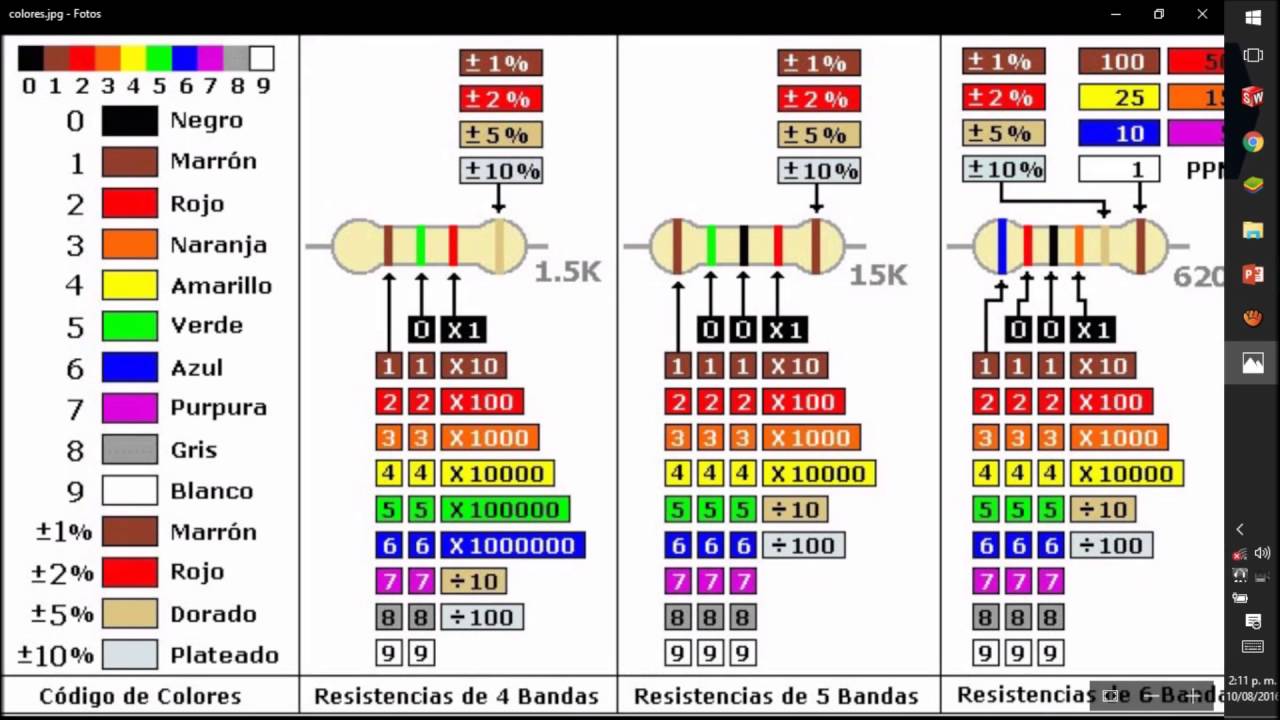
Vamos a hacer uso de resistencias para algunos montajes por ello te dejo a mano el código de colores de las resistencias:
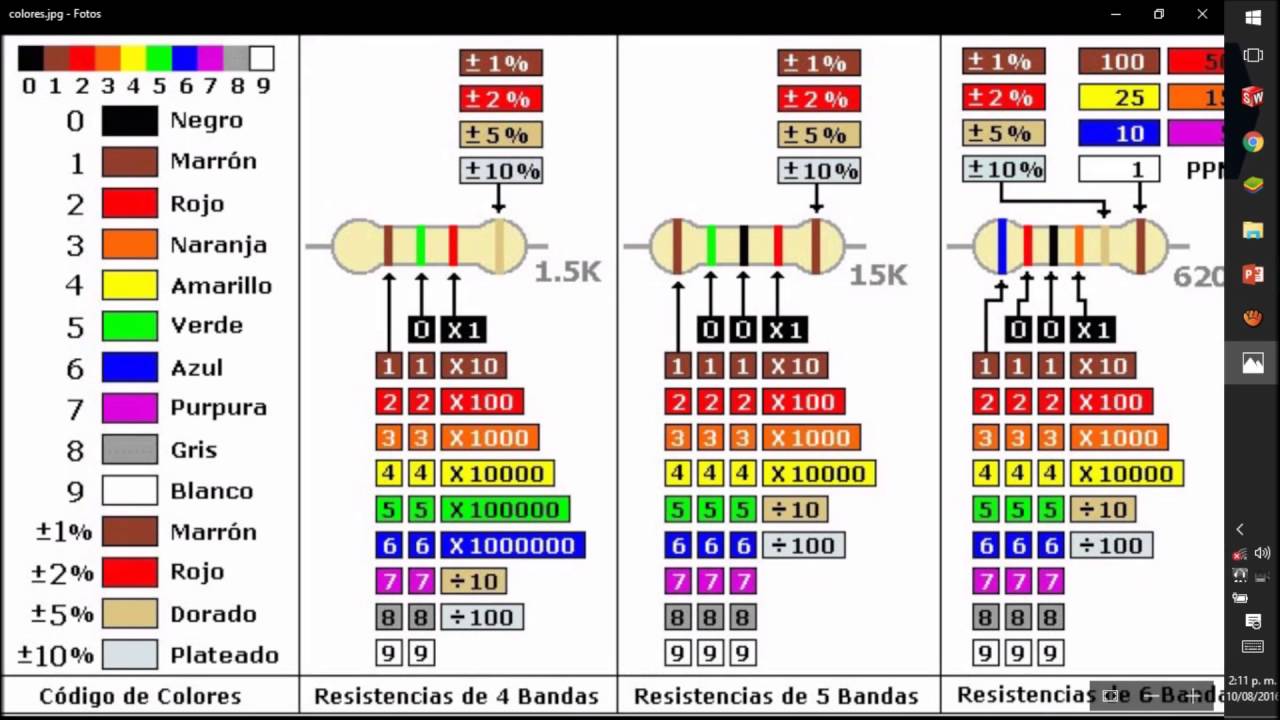
Imagen obtenida de https://i.ytimg.com/vi/ox8Su0lyFXo/maxresdefault.jpg
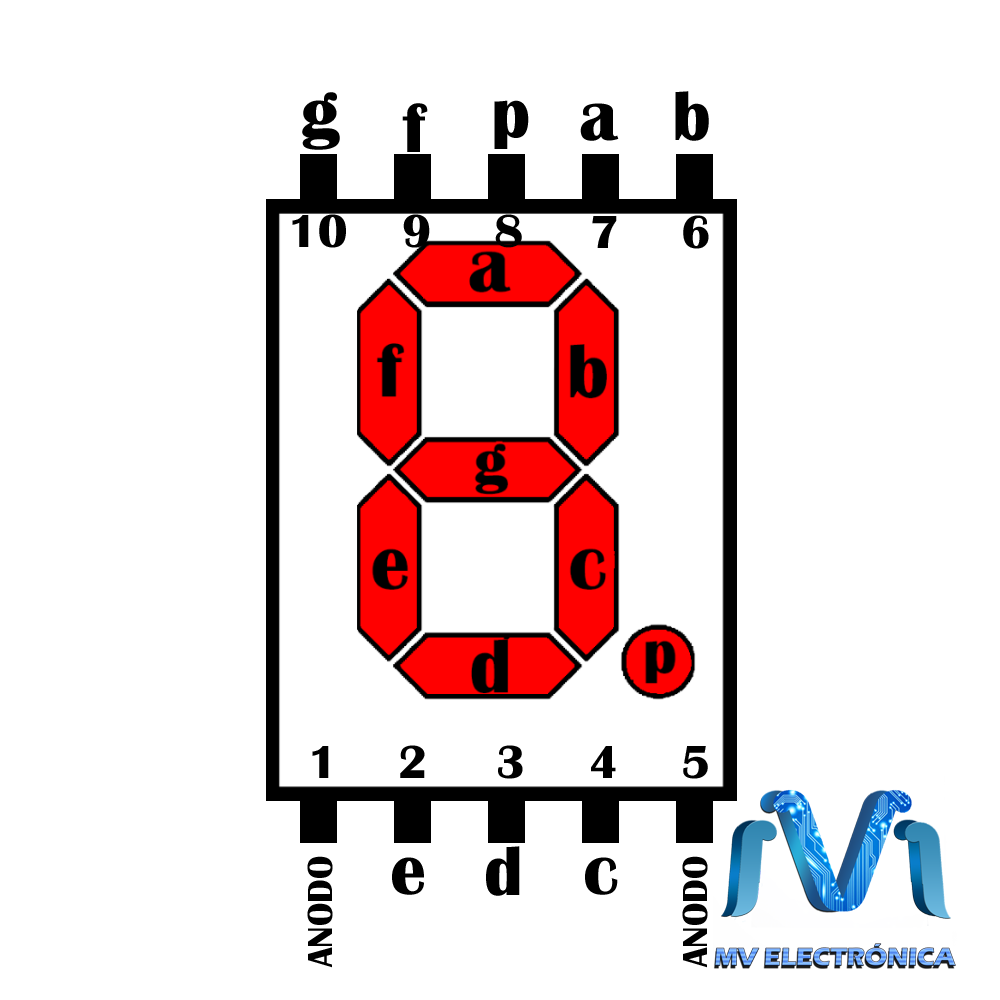
También necesitaremos conocer los diferentes segmentos de un display
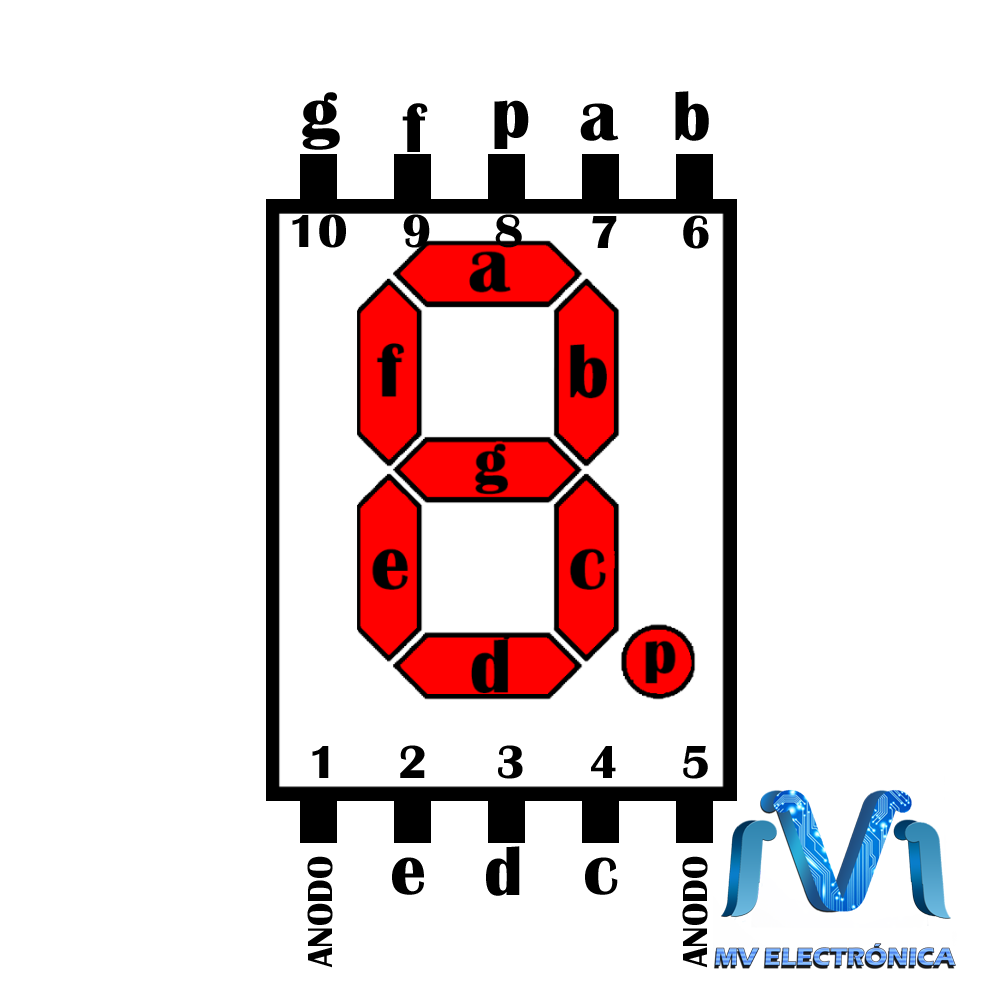
Imagen obtenida de https://mvelectronica.com/storage/app/OPTOELECTRONICA/DISPLAY/D7S3A/2.png
Lo último que tenemos que tener claro es el patillaje de un diodo LED
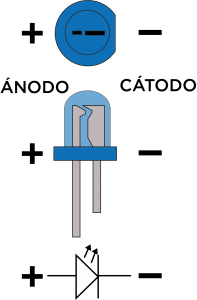
Imagen obtenida de https://ebotics.com/es/actividad/proyecto-no-2-controlar-el-brillo-del-led/
También recuerda:
- Ley de Ohm: V = R * I (Tensión es igual a Resistencia por Intensidad) en sus respectivas unidades:
- Tensión se mide en Voltios (V)
- Resistencia se mide en Ohmios (Ω)
- Intensidad se mide en amperios (A)
- Un diodo sólo deja pasar la corriente en un determinado sentido por ello verifica que si no se enciende está conectado en la posición correcta (si no luce también puede ser que esté quemado)
Ejemplo de cálculo
Si queremos actuar sobre algún dispositivo lo haremos a través de los pines que podemos encender y apagar a través del software. Si recurrimos a la documentación de Raspberry Pi indican "A GPIO pin designated as an output pin can be set to high (3.3V) or low (0V)." Es decir, cuando establezcamos que un pin está encendido (a HIGH, a 1, son todo sinónimos) significa que estaremos estableciendo que en ese pin hay 3,3V mientras que si establecemos que un pin está apagado (a LOW, a 0, son todo sinónimos) significa que estamos estableciendo que en ese pin hay 0V. Además la corriente máxima con la que pueden funcionar un GPIO en la Raspberry es 16mA.
Así, si queremos utilizar un diodo LED rojo que funciona con 1,7 V y 20mA tendremos un exceso de 1,6V (los 3,3V que genera la salida de la Raspberry menos los 1,7V que requiere el LED rojo) ese exceso de tensión tendremos que dárselos a otro componente para que no se queme el LED por ello en nuestro diseño meteremos una resistencia, que no tendrá mas objetivo que ser ella la que consuma ese exceso de 1,6V. ¿Y de cuánto tendrá que ser esa resistencia? Sabemos que en esa resistencia tiene que haber 1,6V y que por ella van a circular 16mA =0,016A (lo ideal sería 20mA pero la Raspberry nos lo limita a 16mA), usamos la Ley de Ohm R=V/I=1,6/0,016 = 100 Ω. Por lo que junto a nuestro led rojo deberemos usar una resistencia de 100 Ω que coincide con un valor standard comercial. Si el valor calculado no coincide con un valor comercial, hay que elegir el inmediato superior (el inferior proporcionaría más corriente y tenemos la limitación de los 16mA de la Raspberry que no queremos quemarlo).
La potencia que "sufrirá" esa resistencia será P= VI = 1.6Vx16mA=27mW por lo tanto cualquier resistencia comercial es válida pues lo mínimo es 1/8W la más común son las 1/4W.
De la misma forma podemos hacer los cálculos para otros colores de Leds, (aquí para descargar la hoja de cálculo) pero como podemos ver, algunos colores no funcionarían con la Raspberry pues necesitan más tensión de la que proporciona la Raspberry
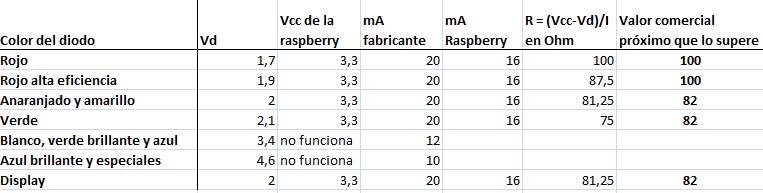
Fuente de datos Wikipedia https://es.wikipedia.org/wiki/Circuito_de_LED
Normalmente en placas como Arduino trabaja a 5V por lo que las resistencias son mayores :
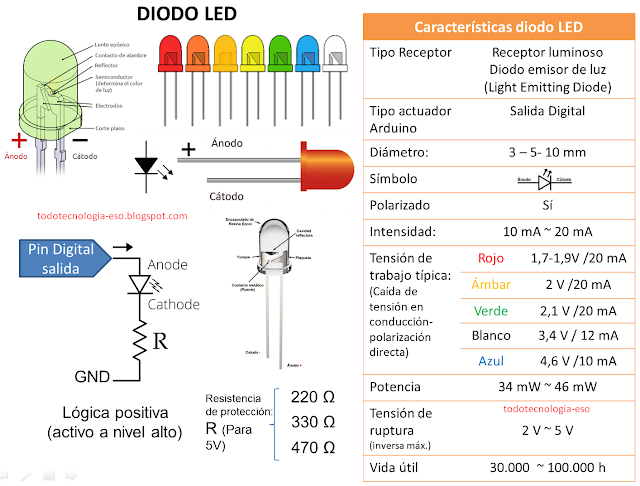
Imagen de https://todotecnologia-eso.blogspot.com/ Licencia CC-BY-SA-NC
Encender y apagar un led
Materiales
- 1 led
- 1 resistencia de 100Ω / 1/4W
- 2 cables
- placa de conexiones
Conexiones
- Resistencia al cátodo del led
- ánodo del led a pin 7 (pin, no GPIO)
- Resistencia a pin 25 (tierra)
Programa
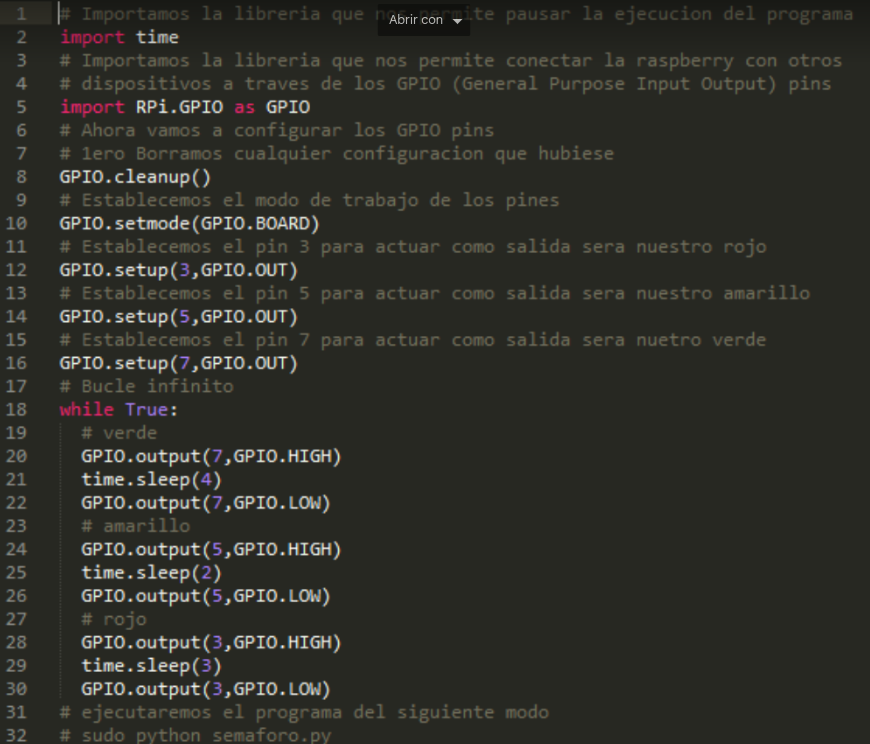
Nos dirigiremos a la terminal y allí escribiremos
nano led.pycon ello se abrirá el editor nano y estaremos trabajando sobre el fichero led.py que si no existe se creará y si existe trabajaremos sobre el existente. A continuación escribiremos el código python que aparece a continuación:
# Importamos la biblioteca que nos permite pausar la ejecución del programa
import time
# Importamos la biblioteca que nos permite conectar a los GPIO pins
# otros dispositivos. GPIO -> General Purpose Input Output
import RPi.GPIO as GPIO
# A partir de aquí configuramos la plcada
# 1ero: borramos cualquier configuración previa
GPIO.cleanup()
# 2ndo: establecemos el modo de trabajo de la raspi
GPIO.setmode(GPIO.BOARD)
# 3ero: Indicamos que el pin 7 actuará como salida
GPIO.setup(7,GPIO.OUT)
# Bucle infinito
while True:
# Escribo en el terminal el texto enciendo
print("enciendo")
# Pongo tensión en el pin 7
GPIO.output(7,GPIO.HIGH)
# Detengo la ejecución del programa 2 segundos
time.sleep(2)
# Escribo en el terminal
print("apago")
# Quito la tensión del pin 7
GPIO.output(7,GPIO.LOW)
# Pauso la ejecución del programa 2 segundos
time.sleep(2)para salir del editor pulsaremos control + x y aceptaremos los cambios. Tras ello, si ejecutamos ls -l veremos listado el directorio en el que nos encontramos y ahí veremos nuestro fichero. Lo ejecutaremos escribiendo python led.py
En el terminal veremos algo similar a
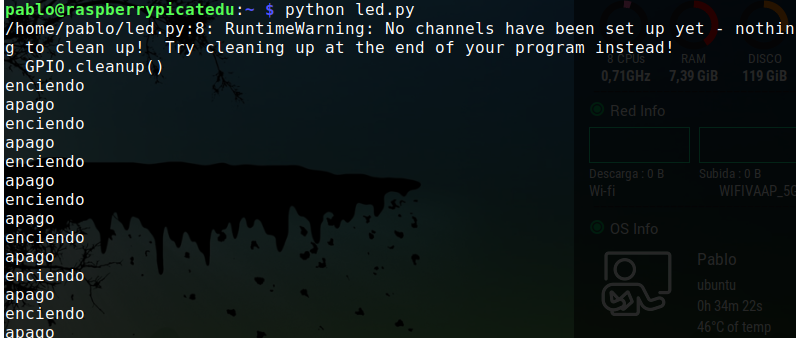
Elaboración propia
Si las conexiones que hemos realizado son correctas veremos como el led va encendiéndose y apagándose. Para detener la ejecución del programa pulsaremos control + c. Dejo a continuación alguna foto del programa funcionando:
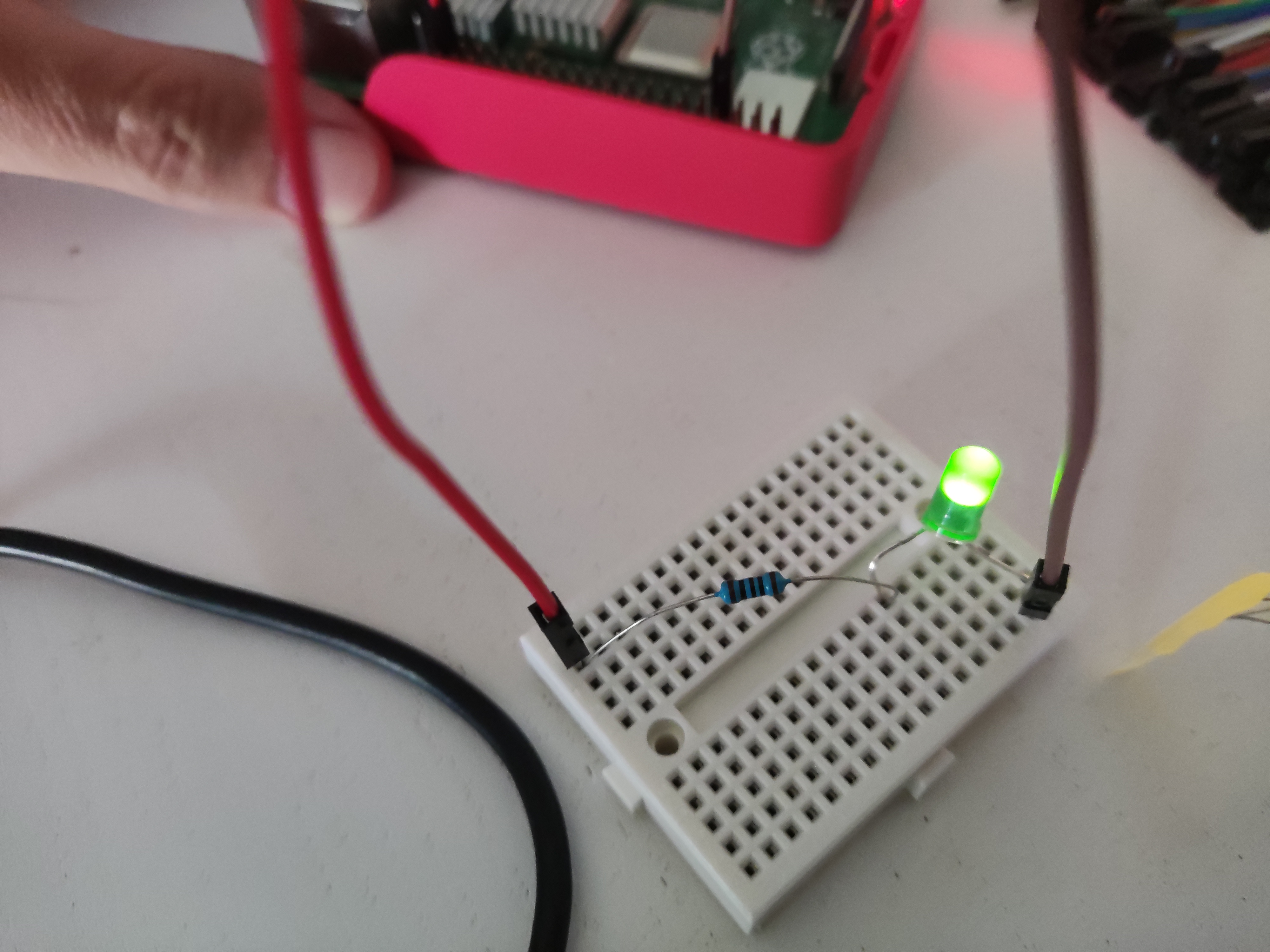
Conexiones en la protoboard. Elaboración propia

Conexiones en la Raspberry Pi. Elaboración propia
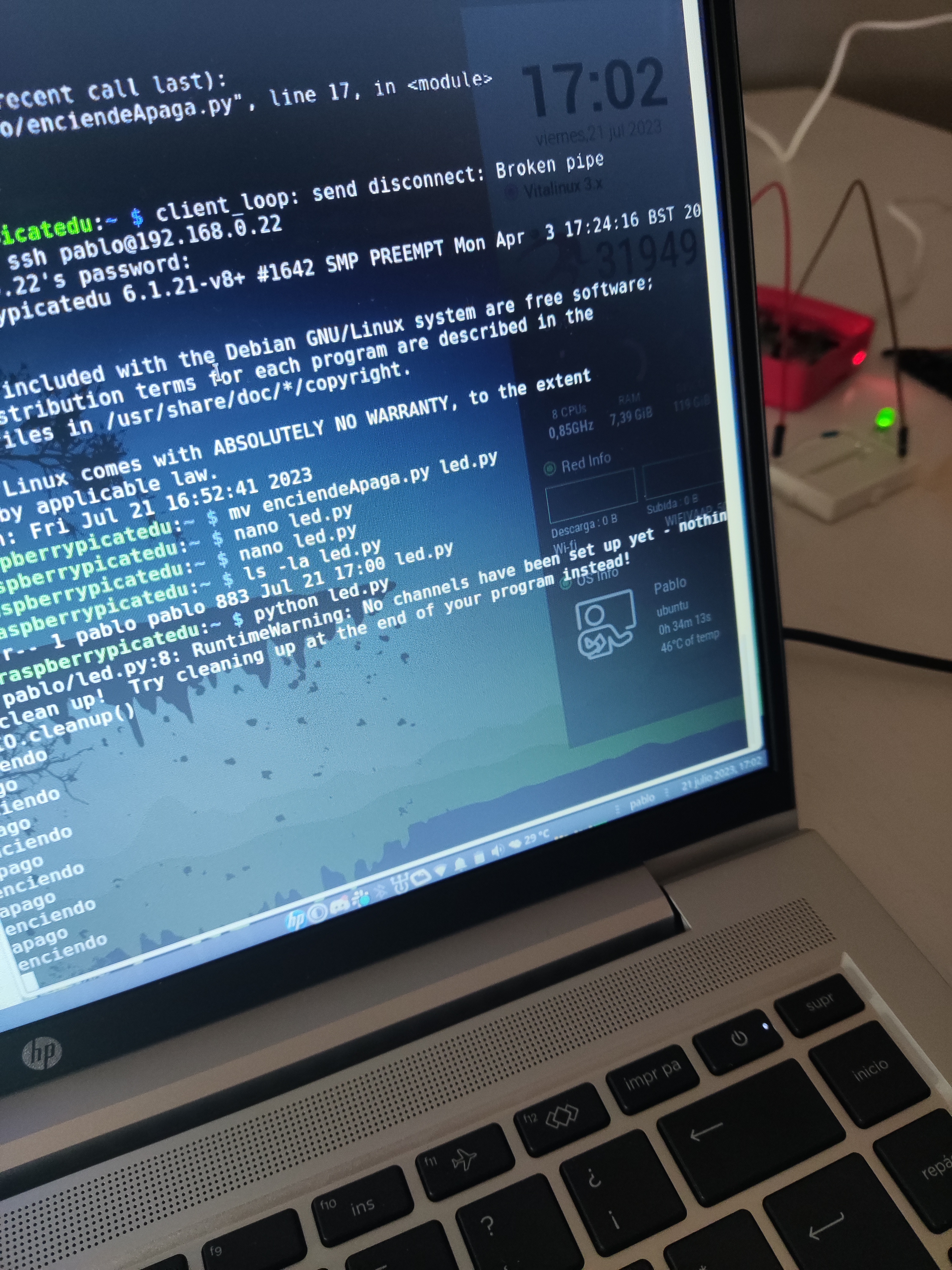
Mensaje de led encendido y led encendido. Elaboración propia
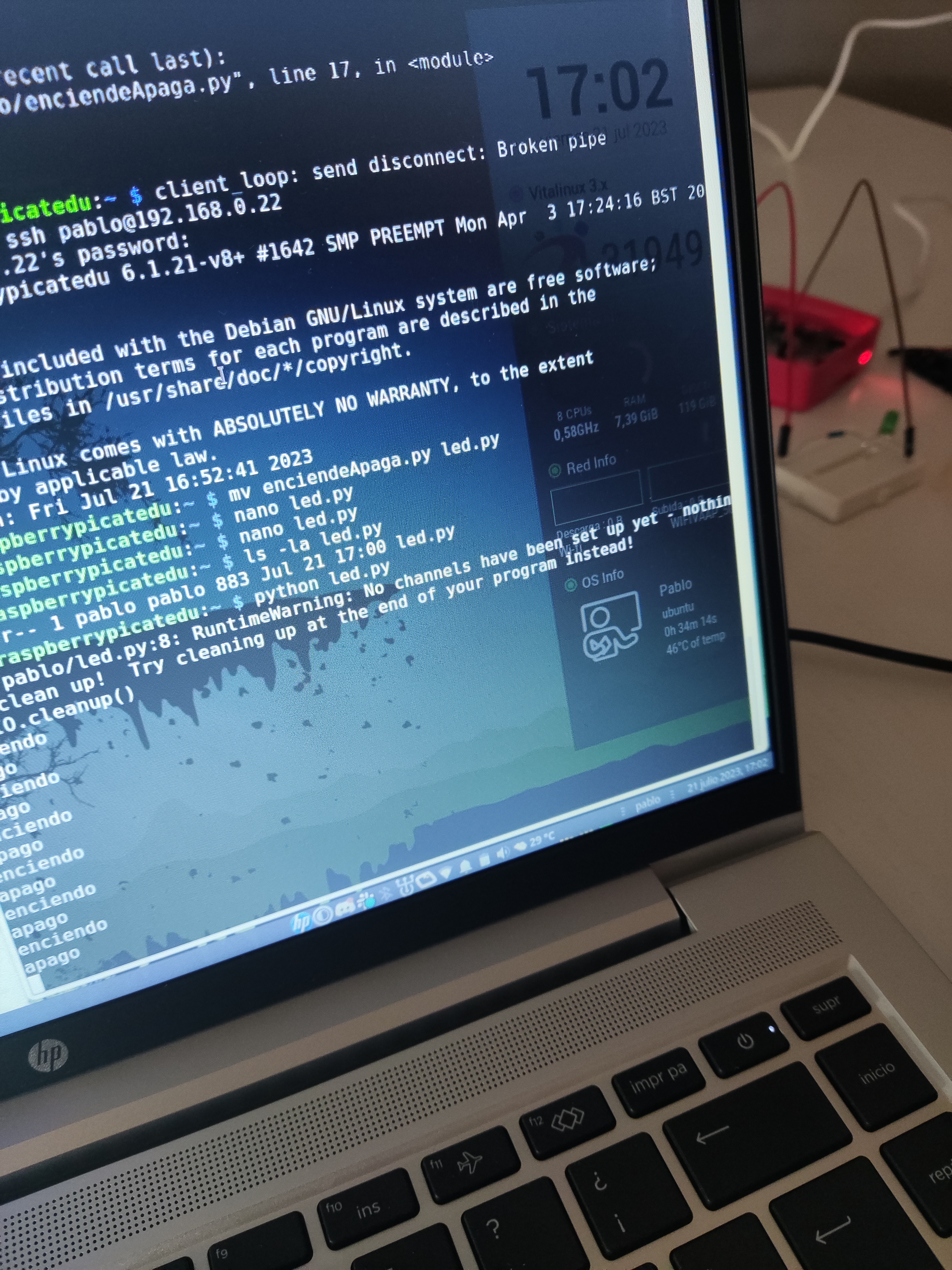
Mensaje de led apagado y led apagado. Elaboración propia
Semáforo
Materiales
- 1 led rojo
- 1 led amarillo
- 1 led verde
- 1 resistencia de 100 Ω y dos de 82 Ω pero si se utilizan todos de 100 Ω no pasa nada.
- 4 cables
- placa de conexiones
Conexiones
- Una resistencia al cátodo de cada led
- ánodo del led rojo a pin 3 (pin, no GPIO)
- ánodo del led amarillo a pin 5 (pin, no GPIO)
- ánodo del led verde a pin 7 (pin, no GPIO)
- Resistencias a pin 25 (tierra)
Programa
Al igual que en el caso anterior crearemos el fichero con nano y lo ejecutaremos con python. Esa parte no varía por lo que no me repito. El nombre que le pongáis al programa no es importante.
{kind=link}
{kind=link}
{kind=link}
Elaboración propia
Display de 7 segmentos
Esta práctica variará en función de si usamos un display de cátodo común o de ánodo común, tenlo en cuenta.
Materiales
- Display de 7 segmentos
- 4 resistencias de 82 Ω o 100 Ω
- 5 cables
- placa de conexiones
Conexiones
Si utilizas un display de cátodo común serán las siguientes:
- Cátodo del display a pin 25 (tierra)
- Pin 3 a resistencia y esta a segmento f.
- Pin 5 a resistencia y esta a segmento e.
- Pin 7 a resistencia y esta a segmento b.
- Pin 11 a resistencia y esta a segmento c.
Si utilizas un display de ánodo común serán las siguientes:
- Ánodo del display a pin 1 (3,3V)
- Pin 3 a resistencia y esta a segmento f.
- Pin 5 a resistencia y esta a segmento e.
- Pin 7 a resistencia y esta a segmento b.
- Pin 11 a resistencia y esta a segmento c.
Programa
Al igual que en el caso anterior crearemos el fichero con nano y lo ejecutaremos con python. Esa parte no varía por lo que no me repito. El nombre que le pongáis al programa no es importante.
El programa encenderá un lateral del display y luego otro de modo infinito. Te propongo que modifiques el programa y las conexiones para convertir esta práctica en una cuenta atrás.
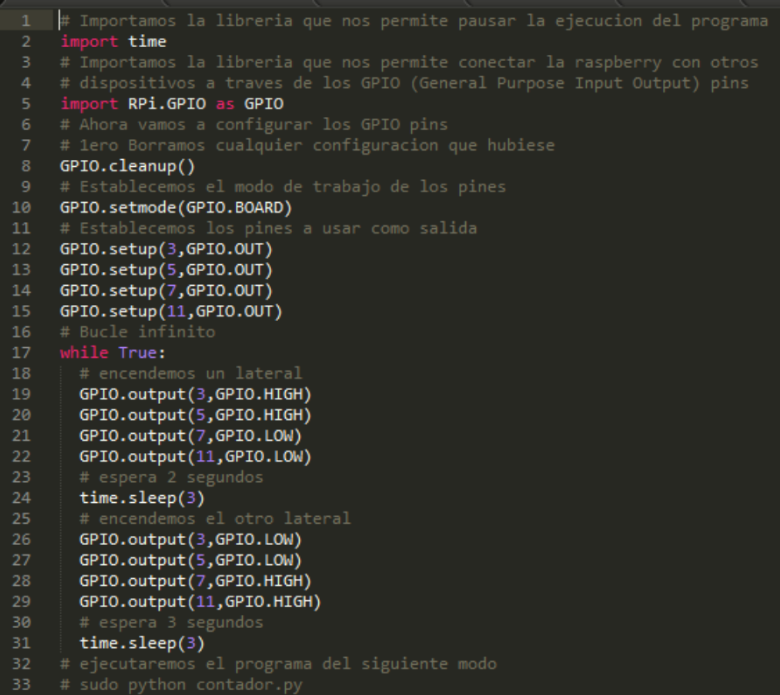
Elaboración propia
Otras prácticas
Con mi alumnado de FP básica otras prácticas que he llevado a cabo han sido:
- encender el led cuando no hay luz (haciendo uso del LDR)
- un detector de humedad (que suene un sonido y/o se enciende una luz cuando el circuito se cierra con la humedad)
En internet existen multitud de prácticas para realizar con la Raspberry Pi.
4.3 Domótica
De nuevo vamos a tomar prestada una definición de la wikipedia:
Se llama domótica a los sistemas capaces de automatizar una vivienda o edificación de cualquier tipo, aportando servicios de gestión energética, seguridad, bienestar y comunicación, y que pueden estar integrados por medio de redes interiores y exteriores de comunicación, cableadas o inalámbricas, y cuyo control goza de cierta facilidad, desde dentro y fuera del hogar. Se podría definir como la integración de la tecnología en el diseño inteligente de un recinto cerrado.
https://es.wikipedia.org/wiki/Dom%C3%B3tica
En nuestro caso, dado que vamos a trabajar con una Raspberry Pi, vamos a ver una solución que yo considero perfecta para este ordenador. Se trata de Home Assintant pero antes de entrar en el meollo de la cuestión vamos a hablar de protocolos.
Protocolos de comunicación
En informática y telecomunicación, un protocolo de comunicaciones es un sistema de reglas que permiten que dos o más entidades (computadoras, teléfonos celulares, etc.) de un sistema de comunicación se comuniquen entre ellas para transmitir información por medio de cualquier tipo de variación de una magnitud física. Se trata de las reglas o el estándar que define la sintaxis, semántica y sincronización de la comunicación, así como también los posibles métodos de recuperación de errores. Los protocolos pueden ser implementados por hardware, por software, o por una combinación de ambos.
También se define como un conjunto de normas que permite la comunicación entre ordenadores, estableciendo la forma de identificación de estos en la red, la forma de transmisión de los datos y la forma en que la información debe procesarse.
Los sistemas de comunicación utilizan formatos bien definidos (protocolo) para intercambiar mensajes. Cada mensaje tiene un significado exacto destinado a obtener una respuesta de un rango de posibles respuestas predeterminadas para esa situación en particular. Normalmente, el comportamiento especificado es independiente de cómo se va a implementar. Los protocolos de comunicación tienen que estar acordados por las partes involucradas. Para llegar a dicho acuerdo, un protocolo puede ser desarrollado dentro de estándar técnico(...)
https://es.wikipedia.org/wiki/Protocolo_de_comunicaciones
En este punto puede ser que os estéis preguntando por qué os estoy contando qué son los protocolos de comunicaciones. En este apartado vamos a trabajar con distintos gadget, sensores, que pueden utilizar diferentes protocolos. Además, algunos de los sensores que voy a comentar funcionan con protocolos que la Raspberry Pi no soporta por lo que requieren de algún hardware adicional. Vamos a enumerar algunos de los protocolos que me parecen mas relevantes de cara a usar domótica en la Raspberry Pi:
- Wi-Fi: Soportado directamente por la raspberry pi.
- Bluetooth: Soportado directamente por la raspberry pi.
- Zigbee: No soportado por la raspberry pi directamente. Se trata de un protocolo de comunicación inalámbrica de bajo consumo. Ideal para dispositivos que requieren comunicaciones seguras con baja tasa de envío de datos y una gran vida útil de sus baterías. Necesita de un adaptador (USB) que conectaremos a la Raspberry Pi y que le dará a la Raspberry la posibilidad de comunicarse a través de este protocolo.
- MQTT (alias mosquito): es un protocolo de mensajería ligero con un consumo muy bajo de energía. Requiere de un broker de mensajería.
Zigbee
Mi adaptador zigbee-USB, un CC2531, lo adquirí por unos 6 € aquí https://es.aliexpress.com/item/32971386349.html requiere ser programado (flasheado). Se puede flashear "facilmente" con un dispositivo similar a https://es.aliexpress.com/item/32976509073.html que cuesta unos 8€ y estando obligados/as a utilizar Windows. También se puede flashear desde la Raspberry Pi utilizando este método https://www.zigbee2mqtt.io/guide/adapters/flashing/alternative_flashing_methods.html (yo no lo he probado)
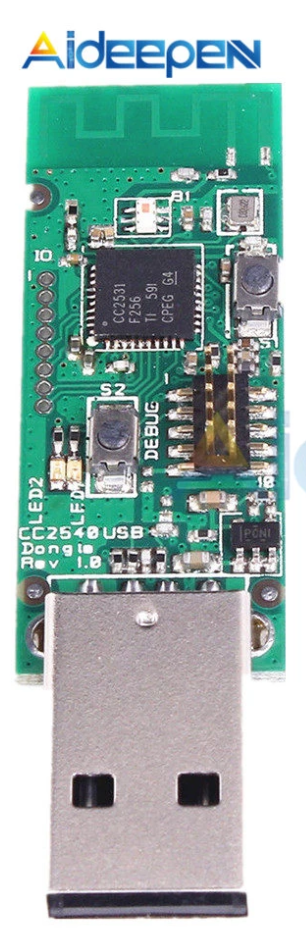
Imagen obtenida de https://es.aliexpress.com/item/32971386349.html
Puede ser que el dispositivo que tengas entre tus manos ya esté flasheado si otro compañero/a lo ha flasheado en una edición anterior del curso. Si así lo deseas puedes volver a flashearlo sin dañarlo.
Os dejo un videotutorial que explica como flashear el dispositivo por si os animáis a utilizar la tecnología Zigbee. Os dejo también el enlace al vídeo ya que hay veces que no carga incrustado en este manual https://youtu.be/70Eav-prgMk En esta página del curso he anexionado (aparecen arriba a la izquierda) también los ficheros necesarios por si en el futuro dejan de estar disponibles en su ubicación actual.
Os dejo alguna foto de las conexiones del proceso de flasheo por si no lo veis correctamente en el vídeo:
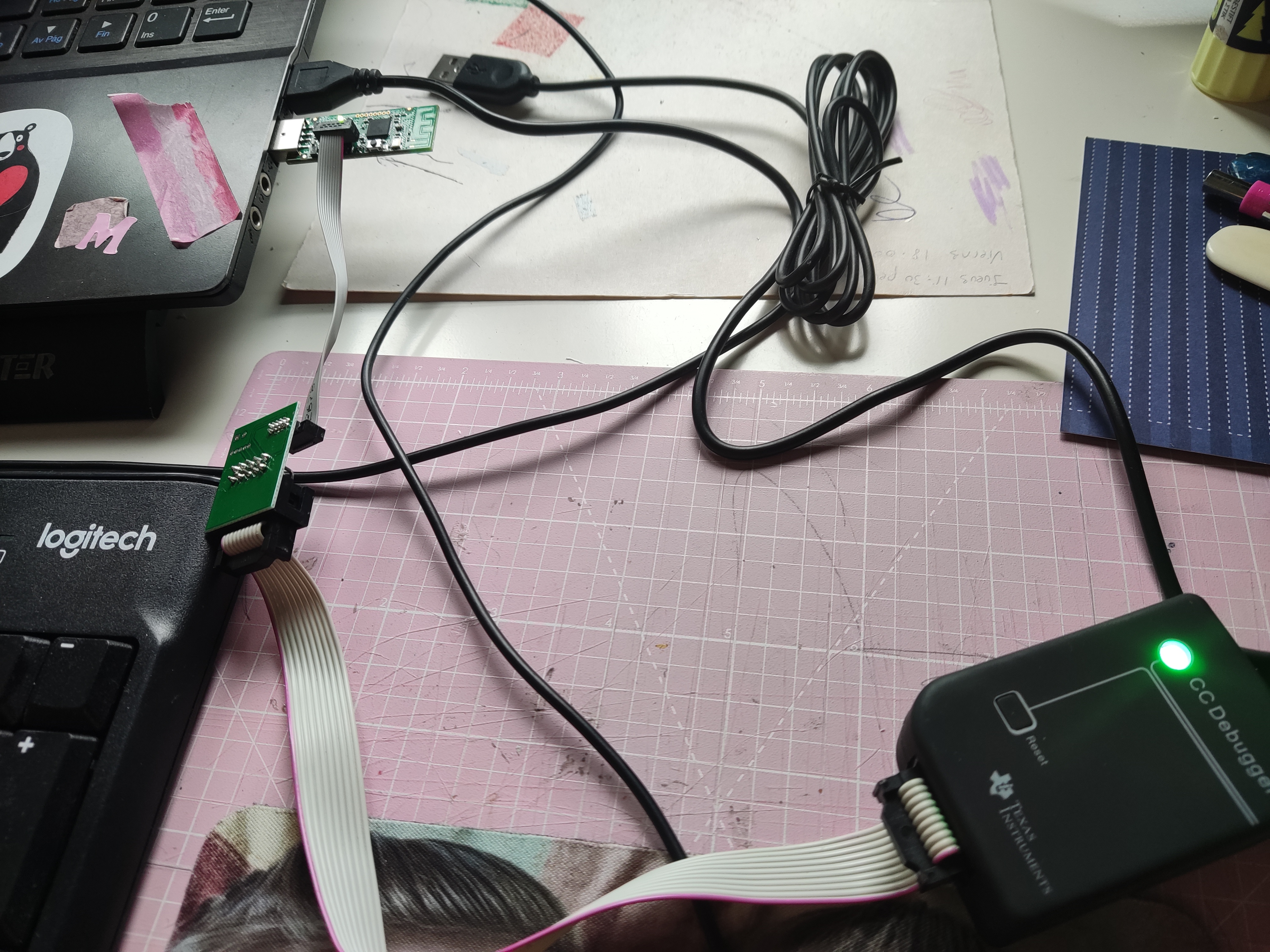
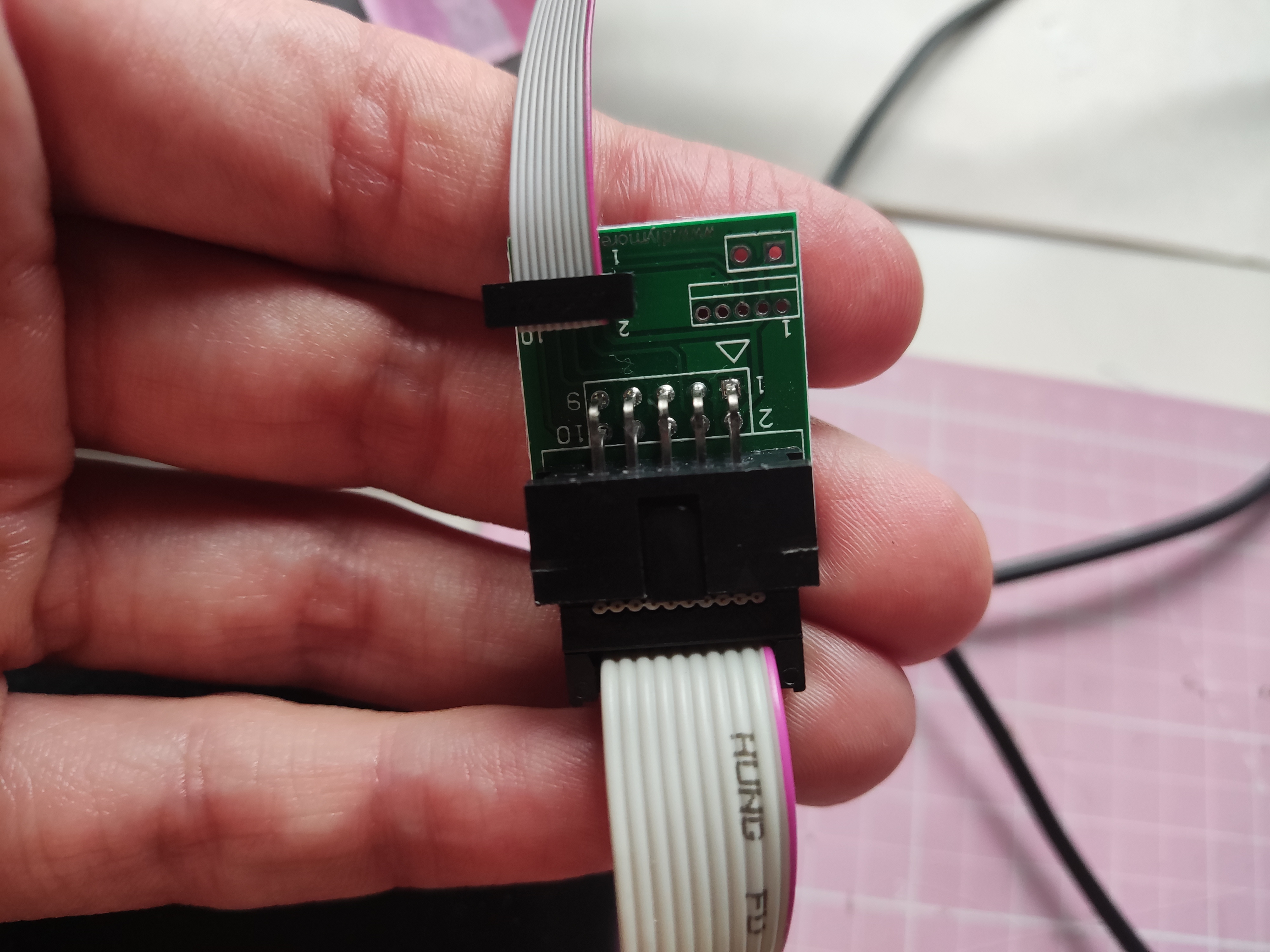


Elaboración propia
El ccdebugger en ocasiones le cuesta MUCHO cambiar el led de rojo a verde. Es cuestión de insistir, reiniciar,... La primera vez que lo hice me costó 2 minutos. La segunda vez que lo hice me costó 20 minutos.
Os dejo unas capturas de pantalla del programa de flasheo:
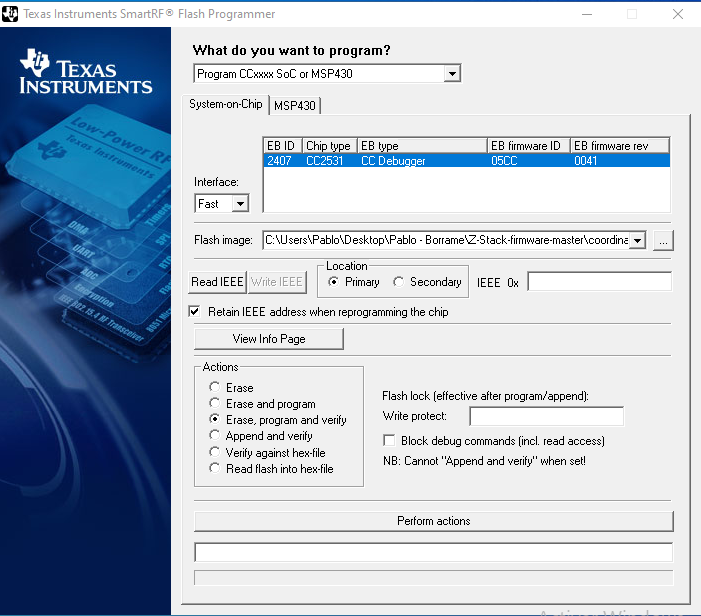
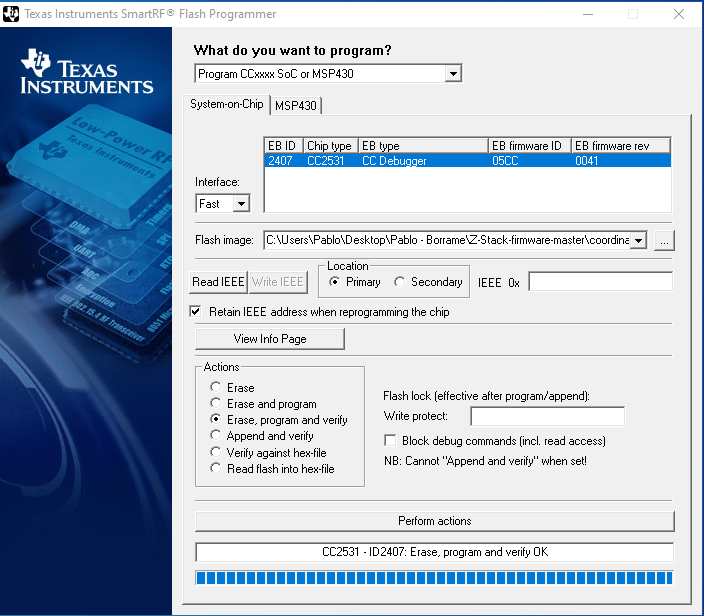
Elaboración propia
Tipos de dispositivos IoT
A la hora de adquirir dispositivos IoT los encontraremos de 2 tipos:
- conectados a la luz
- con batería/pilas
en algunos casos tiene sentido que estén conectados a la luz, es el caso de un termostato de la calefacción o un motor para subir/bajar las persianas, mientras que otros, como un sensor de temperatura o un actuador de radiador, tiene mas sentido que funcionen con batería/pilas en lugar de tener que llevar un enchufe a cada radiador o a cada punto dónde queramos medir
Además de la clasificación anterior, nos encontraremos básicamente dispositivos de 2 tipos: Wi-Fi y Zigbee pero no Bluetooth ¿por qué? por el consumo. Los dispositivos que utilizan el protocolo Bluetooth consumen mucha mas batería que los que usan, por ejemplo, zigbee. Nadie quiere un dispositivo IoT al que tiene que cambiarle las pilas cada mes cuando existe uno equivalente al que puede cambiarle la pila cada 2 años.
Privacidad
Una cuestión que yo considero MUY importante es el que el acceso a nuestros datos o a la funcionalidad del hardware no requiera de tener acceso a la nube de una determinada empresa por cuestiones ya no solo de privacidad sino por el hecho de que si esa empresa cierra su nube o establece un servicio de pago estamos condenados a pagar o cambiar el dispositivo con las implicaciones medioambientales y económicas que ello supone. Muchos fabricantes, como tuya, plantean que para usar sus dispositivos Zigbee debes adquirir su hub (concentrador) y posteriormente este hub, a través de su app o web, te dará los datos que recopila o te permitirá interactuar con tus dispositivos. Frente a esta filosofía está la posibilidad de utilizar un software propio al que conectemos nuestros dispositivos (WiFi o Zigbee) y de la compañía que queramos (tuya, sonoff,...) sin depender de nubes de terceros. Además, con soluciones como las que hemos visto en el capítulo 3 para la creación de VPNs, podremos acceder a nuestro dispositivo desde cualquier lugar. Por ello en el siguiente apartado vamos a hablar de Home Assistant.
Home Assistant
![]()
Imagen obtenida de https://design.home-assistant.io/#brand/logo
Hassio, por si mismo, requeriría de un curso dedicado de una cantidad importante de horas por ello vamos a centrarnos en aquello mas relevante.
Antes de comenzar voy a mostraros mi instalación de Home Assistant con los diferentes sensores, gráficas y automatizaciones que tengo así como por qué empecé a montar este sistema y qué quiero hacer en el futuro.
Inicialmente monté esto para ubicar en cada dormitorio un sensor de temperatura y posteriormete ubicar un actuador de apertura/cierre en cada radiador. La idea era abrir o cerrar cada radiador de modo automático en función de la temperatura de cada estancia. Con posterioridad leí que estos actuadores con tanta apertura/cierre acababan estropeandose y por ello desistí de instalar estos actuadores en los radiadores pero la mecha ya estaba prendida.
En la actualidad tengo los siguientes sensores/actuadores:
- sensor de apertura: en la puerta de entrada a mi domicilio
- sensor de presencia: en la primera estancia a la que se accede desde la puerta de entrada
- sensor de temperatura y humedad en salón
- sensor de temperatura y humedad en el dormitorio principal
- termostato
- sensor de consumo: en el cuadro eléctrico de casa
- sensor de apertura: frigorífico
- receptor/emisor de infrarrojos
- detección de aparatos en red de casa
Todos, excepto el último, funcionan con zigbee mientras que el último hace uso de wifi.
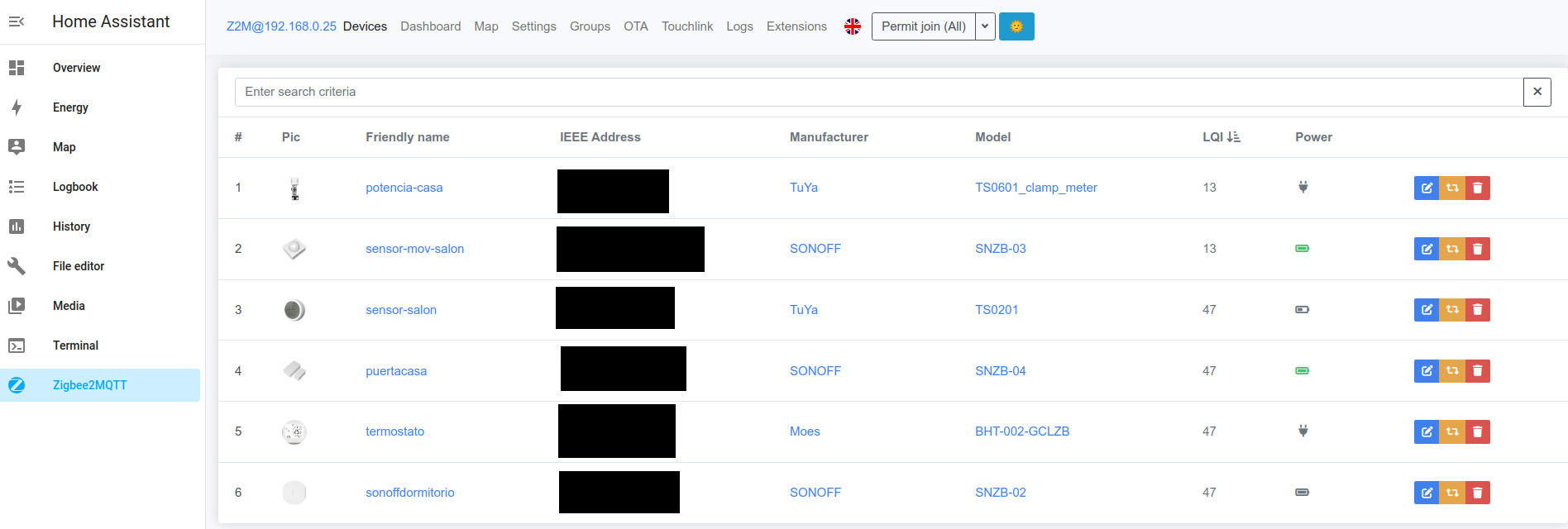
Elaboración propia
Estos sensores me permiten obtener valores del instante en que realice la consulta pero también históricos. También me permite actuar directamente sobre los sensores como el termostato. Todo ello se configura en unos dashboards muy sencillos como los que vemos a continuación
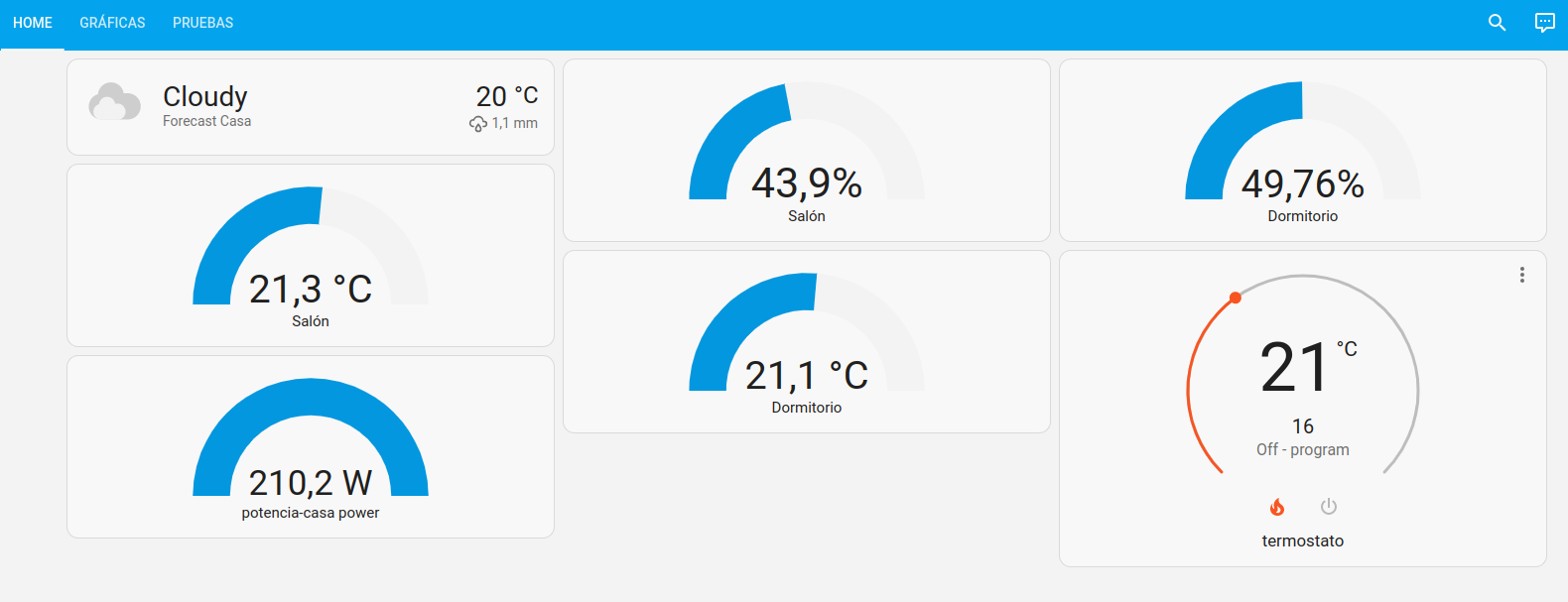
Elaboración propia
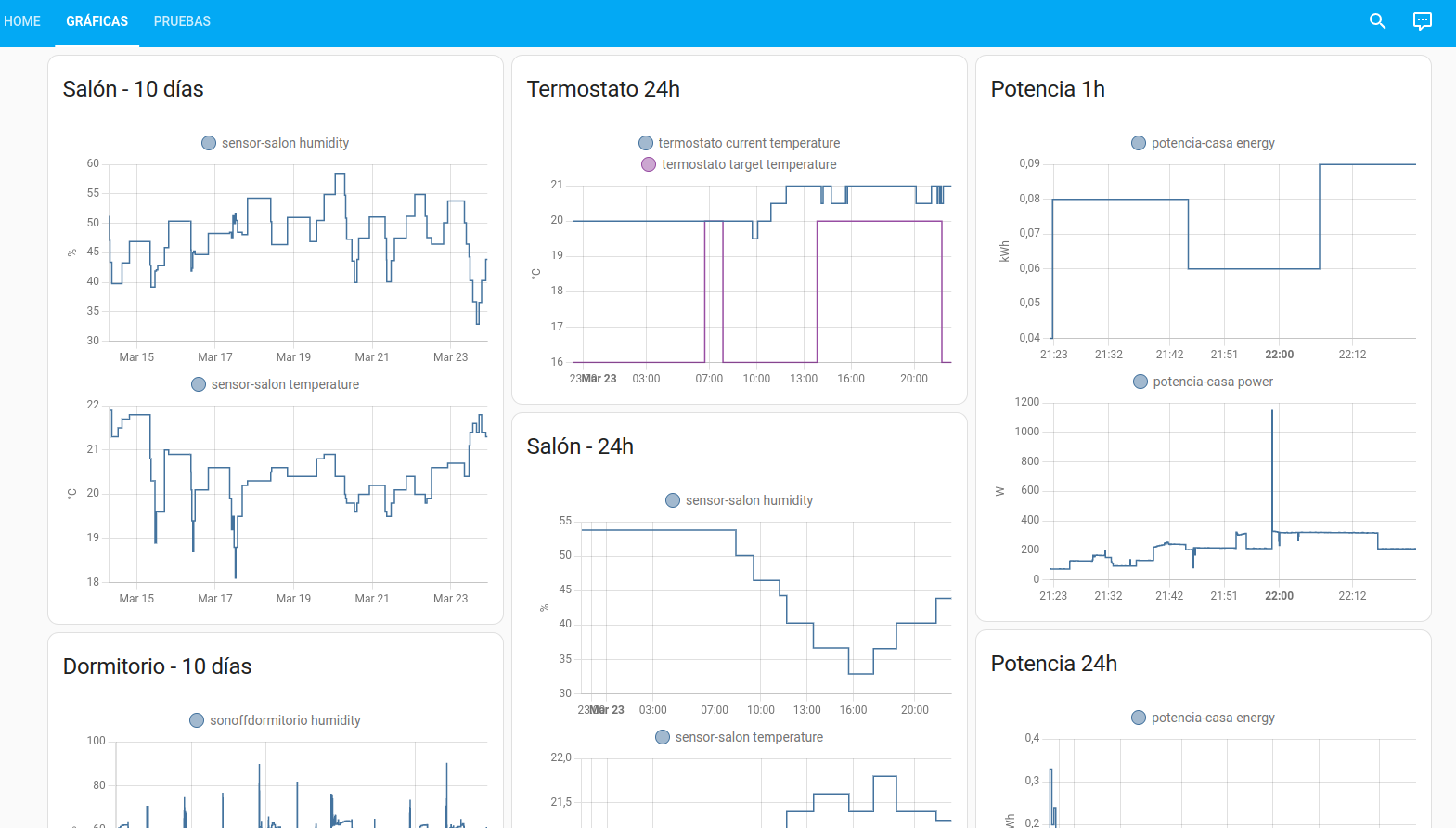
Elaboración propia
Elaboración propia
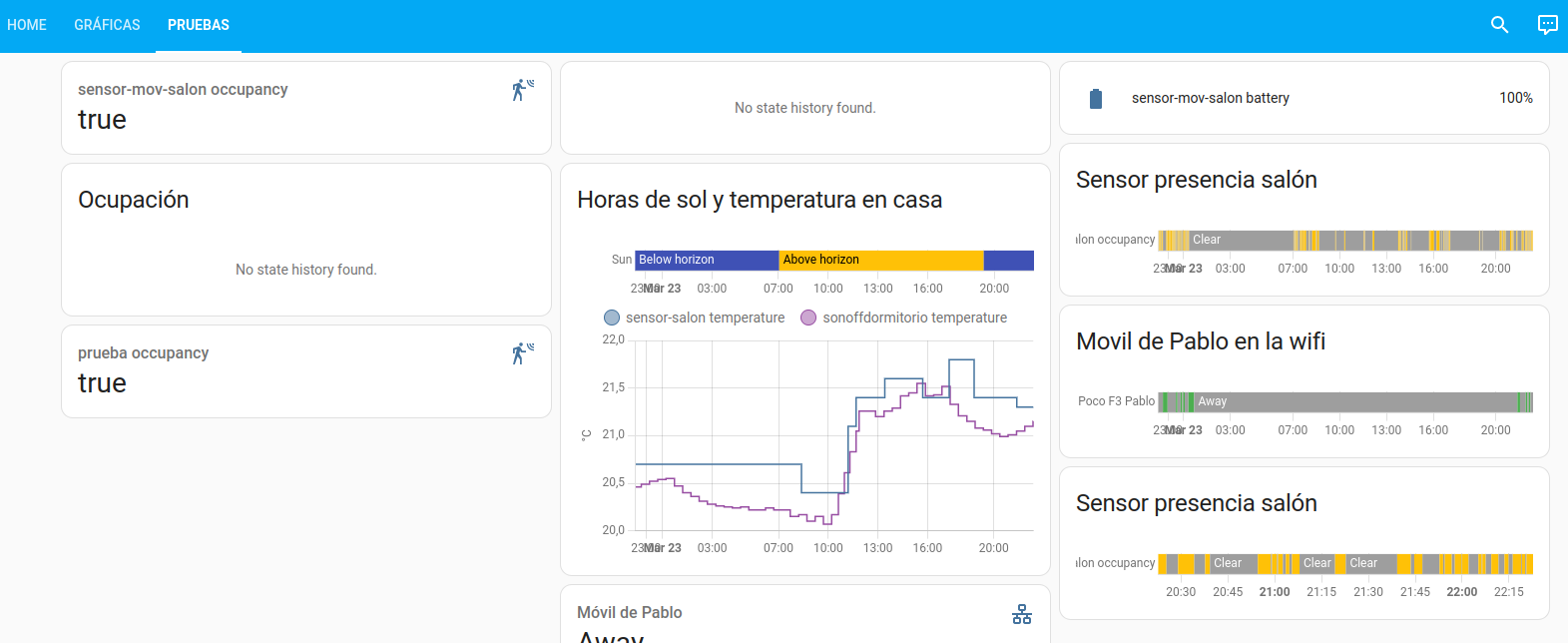
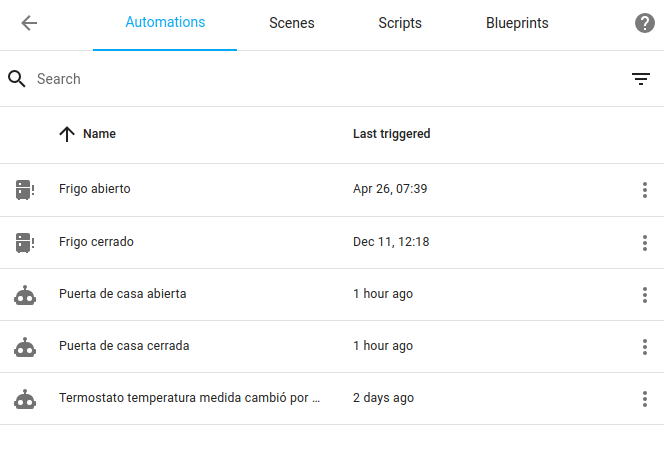
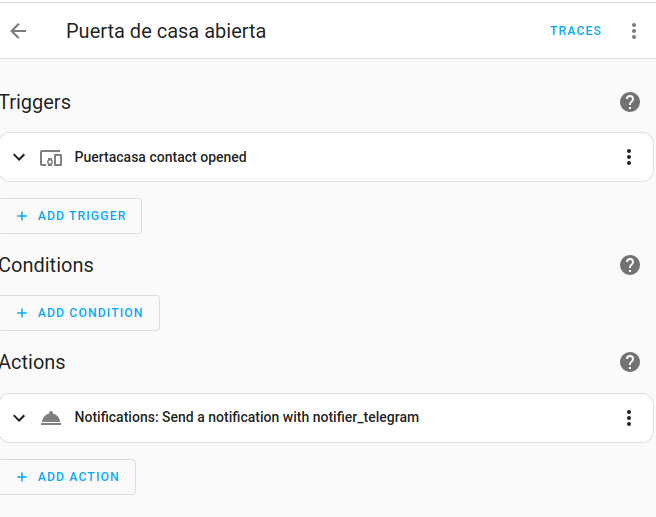
A partir de lo anterior se pueden crear diferentes automatizaciones. Por ejemplo yo tengo creadas las siguientes:
- Frigo abierto: Mi frigorífico no tiene sensor avisador si te dejas la puerta abierta por lo que intenté hacer un avisador en caso de que estuviese abierto mas de 10s. Mis hijas arrancaron el sensor antes de ponerlo en marcha.
- Frigo cerrado:
- Puerta de casa abierta: Me manda un mensaje por telegram cada vez la puerta de casa se abre. Lo uso a modo de alarma
- Puerta de casa cerrada:
- Termostato temperatura medida cambió por debajo de 19ºC: Lo tengo creado para pruebas con el termostato
Elaboración propia
Elaboración propia
Visto lo que yo tengo es momento de empezar por la instalación: Home Assistant (https://www.home-assistant.io/) puede ser instalado dockerizado o puede ser instalado directamente como un sistema operativo en una tarjeta SD dedicada. En mi caso opto por la 2ª opción pues como vemos en la imagen posterior el hecho de tenerlo instalado de este modo me permite disfrutar de todas las posibilidades de la herramienta.
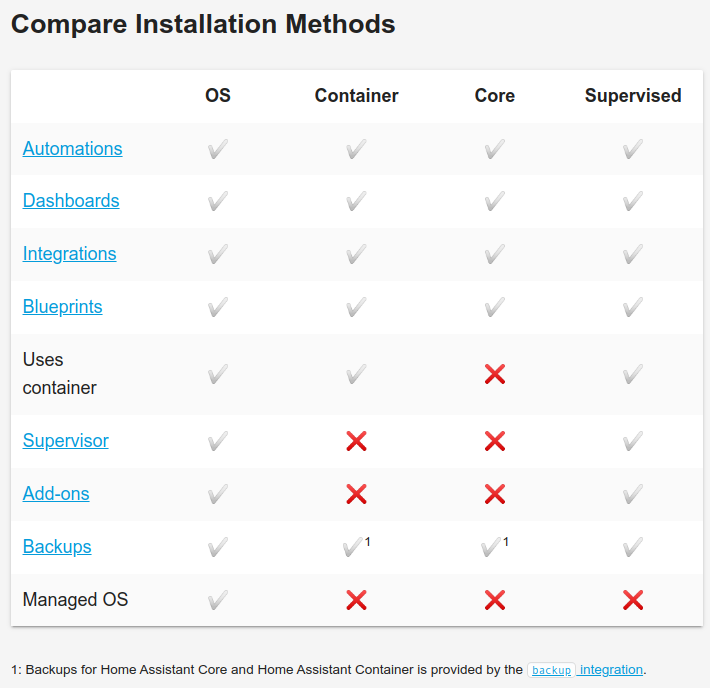
Imagen obtenida de https://www.home-assistant.io/installation/
En la dirección https://www.home-assistant.io/installation/ tenemos a nuestra disposición las diferentes formas de instalación. En el caso de elegir la instalación vía sistema operativo descargaremos la imagen y la instalaremos tal como vimos en el capítulo 2.1.1. Os dejo también un tutorial por si os resulta de utilidad https://domoticaencasa.es/video-tutorial-instalacion-de-home-assistant/
Si vais a trabajar con dispositivos Zigbee necesitaréis conocer qué es Zigbbe2Mqtt por ello os dejo este enlace https://domoticaencasa.es/video-funciona-mqtt-integrar-home-assistant/ a un tutorial que explica como funciona y como integrarlo en Home Assistant. Os dejo también un vídeo:
El protocolo MQTT se usa en robótica educativa, por ejemplo aquí en el curso ESP32 en el Aula con Arduinoblocks
Si te quedas con ganas de mas voy a recomendarte esta serie de 8 vídeos dónde indican como proceder con hassio y zigbee:
Una función muy interesante es la de que hassio nos envíe notificaciones en Telegram por ello os dejo un enlace a este tutorial https://domoticaencasa.es/home-assistant-9-notificaciones-telegram/ dónde explica como hacerlo. Este canal os puede resultar también de gran utilidad para los servicios que hemos desplegado a lo largo del capítulo 3.
Integraciones
Si además de las integraciones que pone por defecto a tu disposición Home Assistant quieres hacer uso de otras no oficiales puedes instalar HACS que nos permite acceder a cientos, si no miles, de proyectos que la comunidad ha creado. Para instalar HACS es suficiente con seguir estas instrucciones: