# 1 ¿Cómo es mClon?
# 1.1 La placa electrónica
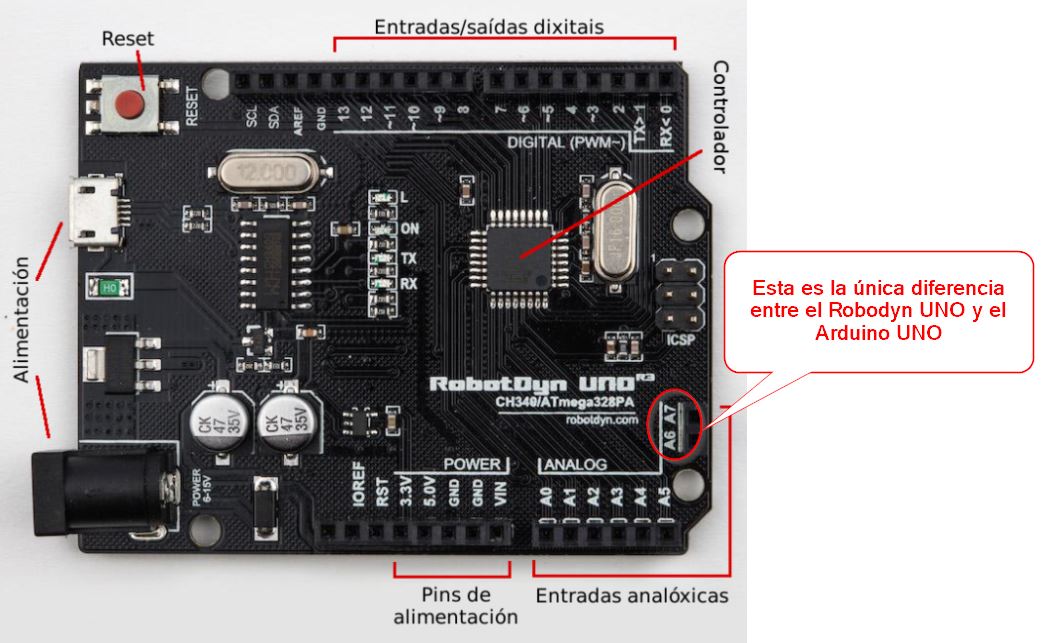
El robot mClon como mBot son sistemas basados en Arduino. La placa controladora es pues un Arduino, pero como veremos en **[opciones](https://catedu.github.io/mClon/propuesta/opciones.html)** en vez de un Arduino UNO vamos a utilizar un **RobotDyn UNO** pues posibilita la utilización del sensor de luz y del botón en placa.
ATENCIÓN: últimamente hay problemas de suministro con esta placa, por eso se ha creado otro tutorial de mClon [https://libros.catedu.es/books/mclon-con-nanoarduino](https://libros.catedu.es/books/mclon-con-nanoarduino)
*Fuente: Adaptado de https://mclon.org/ Maria L CC-BY-SA*

*Fuente: https://mclon.org/ Maria L CC-BY-SA*
# 1.2 Motores
Los motores son de corriente continua sin control de su posición, es decir, sólo podemos controlar su sentido de giro y su potencia.

El control de los motores implicará poner en el escudo Protoboard dos circuitos integrados y su cableado correspondiente, vamos a verlo:
## 1.2.1.- Driver motor B6612FNG
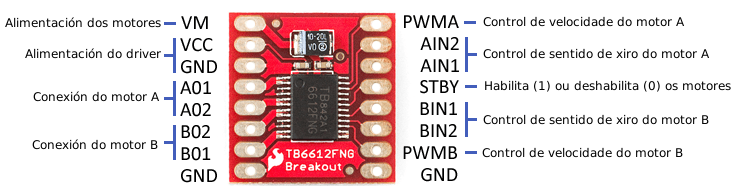
Para realizar el control de los motores, tanto su potencia como su sentido de giro se va a utilizar el controlador **TB6612FNG**
*Fuente: https://mclon.org/ Maria L CC-BY-SA*
La potencia de los motores se controla por los pines PWMA y PWMB indicando un valor entre 0 y 255.
## 1.2.2.- Los giros, una complicación más: 7404
Los giros se controlan con los pines AIN, por ejemplo para el motor A :
| GIRO MOTOR | AIN1 | AIN2 |
| CLOCKWISE (sentido agujas del reloj) | 0 | 1 |
| ANTICLOCKWISE (contrario) | 1 | 0 |
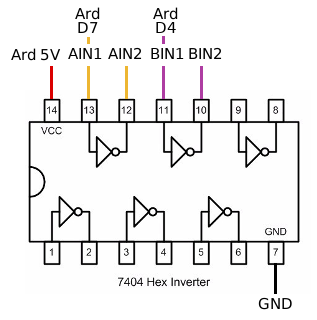
Para no gastar dos pines del Arduino para esta función, un truco consiste en gastar sólo uno, y el otro que sea el inverso de ese mismo. Ese truco es lo que utiliza mBot y si queremos compatibilidad mClon y mBot tenemos que hacerlo.
Pero esto implica tener que utilizar un **circuito impreso más**, el 7404 que tiene 4 inversores :
### 1.2.3.- Otra opción para los giros
Tal y como dice la página [https://tecnoloxia.org/mclon/robotica/o-control-dos-motores/](https://libros.catedu.es/link/3320#bkmrk-utilizamos-el-tracke) también se puede utilizar dos transistores y resistencias, (de echo, mBot lo hace así) pero no lo utilizaremos, pues pensamos que es más cómodo el 7404.
# 1.3 Sensores
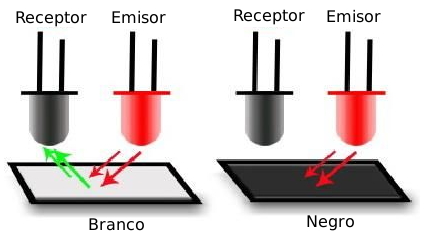
# 1.3.1 Sensor sigue líneas infrarojos
Utilizamos el tracker sensor TCRT5000

Tal y como hemos explicado en [Partes impresas](https://catedu.github.io/mClon/propuesta/partesimpresas.html) no tiene que estar cerca de la línea.
En https://tecnoloxia.org/mclon/robotica/os-sensores-ir-de-lina/ explica muy bien cómo funciona:
*Fuente: https://mclon.org/ Maria L CC-BY-SA*
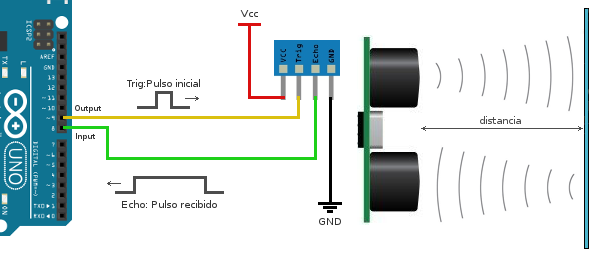
# 1.3.2 Sensor evita obstáculos ultrasonidos
Se utiliza el sensor HC-SR04

En https://tecnoloxia.org/mclon/robotica/o-sensor-ultrasonico/ explica muy bien cómo funciona:
# 1.3.3 Sensor de luz
Es un LDR que conectado en serie con una resistencia nos proporciona un valor de tensión, pues el LDR varía su resistencia con la luz (a más luz, menos resistencia)
En nuestra propuesta sólo va a tener un LDR, pero se pueden añadir dos LDRs fácilmente, [ver 2.2](https://libros.catedu.es/books/regalate-un-mclon/page/22-propuesta-mclon-vs-mbot "2.2 Propuesta mClon vs mBot")
# 1.4 Accesorios
# 1.4.1 Botón en placa
Este botón es muy útil para dar comienzo a los programas, por ejemplo en el siguiente programa hasta que o aprieto el botón el robot no comienza a dar vueltas :
[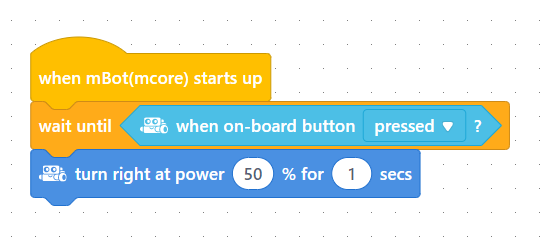](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-17-14-45-48-mblock-block-based-ide-coding-for-beginners.png)
En mClon utilizaremos el botón del escudo Protoboard, pero hay que soldar un cable que lo veremos en **3.1 Pasos previos** para montar el siguiente esquema:
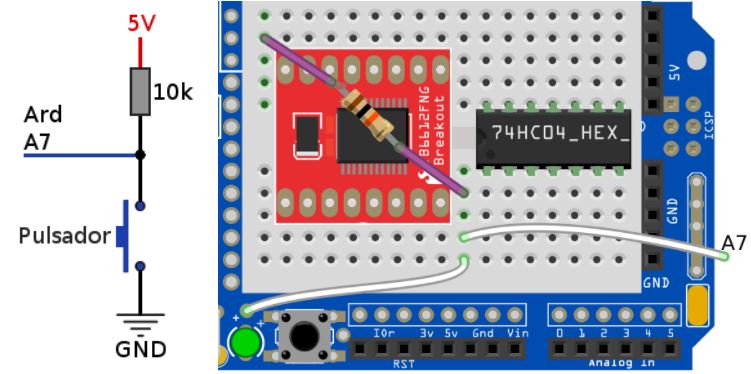
*Fuente: https://mclon.org Maria L CC-BY-SA*
### 1.4.2 zumbador
Sólo se necesista un zumbador **pasivo**, es decir, es un simple altavoz, la instrucción de mBlock ya se encarga de reproducir el tono .

La ventaja de ser pasivo es que podemos reproducir diferentes tonos, para saber más ver [esta página de Luis Llamas](https://www.luisllamas.es/reproducir-sonidos-arduino-buzzer-pasivo-altavoz/) . Un zumbador activo reproduce un tono fijado al suministrarle tensión, para saber más [esta página de Luis Llamas](https://www.luisllamas.es/arduino-buzzer-activo/).
# 1.5 Extras
# 1.5.1 LED RGB
Imitando a mBot, el mClon tiene unos leds RGB que pueden tener diferentes colores.

La instrucción en mBlock permite la combinación de los colores primarios para conseguir la tonalidad que se quiera.

> Xa teño LEDs RGB!! Na páxina [https://t.co/2cUJy6ivcY](https://t.co/2cUJy6ivcY) podes ver como conectalos e nesta outra [https://t.co/Cql4kUmRbt](https://t.co/Cql4kUmRbt) explicamos como funcionan e propoñemos algunhas prácticas [pic.twitter.com/vJPyjZ7J6S](https://t.co/vJPyjZ7J6S)
>
> — mClon (@mClonRobot) [November 3, 2018](https://twitter.com/mClonRobot/status/1058711684053897216?ref_src=twsrc%5Etfw)
# 1.5.2 Brazo robótico
Los servomotores son motores que sí tenemos control del giro, es decir, que podemos ordenar que gire un ángulo determinado.
Utilizaremos en mBlock la instrucción (como se conectará al D11 de la placa, es el Slot1, si lo conectaramos al D12 sería el Slot2)

Utilizaremos el servo colocado a un lado para insertar el brazo robótico:

*Fuente: https://mclon.org/ Maria L CC-BY-SA*
> Probando servo. Non hai obstáculo que se me resista! [pic.twitter.com/ZiD7XNDZ3l](https://t.co/ZiD7XNDZ3l)
>
> — mClon (@mClonRobot) [November 6, 2018](https://twitter.com/mClonRobot/status/1059824892915433475?ref_src=twsrc%5Etfw)