# 3 Montaje
# 3.1 Pasos previos
Los pasos al detalle lo explica en [https://tecnoloxia.org/mclon/estrutura/pasos-previos/](https://tecnoloxia.org/mclon/estrutura/pasos-previos/) pero con la propuesta de Catedu sólo tenemos que seguir los siguientes pasos:
## 3.1.1 Lo que tienes que hacer tú
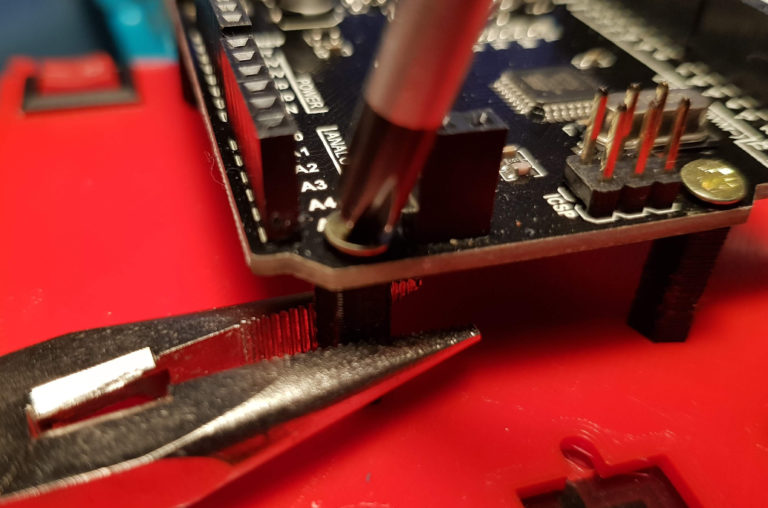
Al insertar el escudo, no nos queda visibles los pines A6 y A7 del Robodyn por lo tanto tenemos que insertarlos ante pero doblados antes de poner el escudo :
[](https://libros.catedu.es/uploads/images/gallery/2022-03/image-1648460378924.jpg)[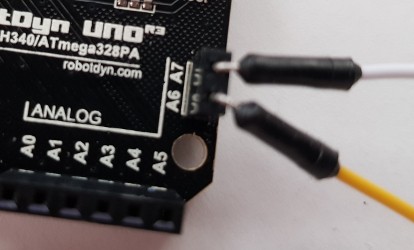](https://libros.catedu.es/uploads/images/gallery/2022-03/image-1648460389645.jpg)

*Fuente: https://mclon.org Maria L CC-BY-SA*
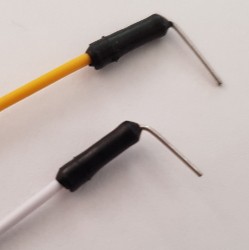
También tienes que doblar los pines de los sensores siguelíneas para que queden perpendiculares al sensor:
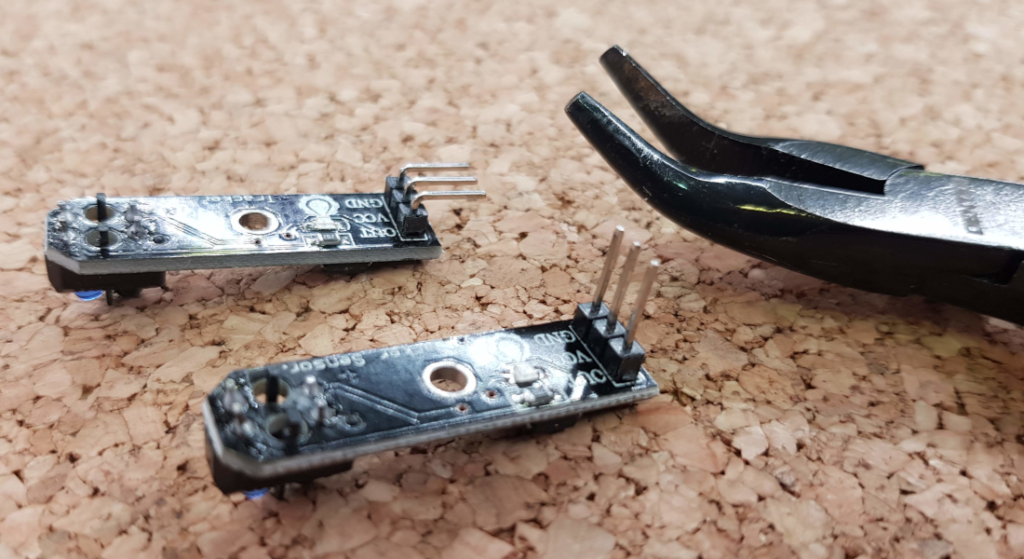
*Fuente: https://mclon.org Maria L CC-BY-SA*
## 3.1.2 Recomendaciones
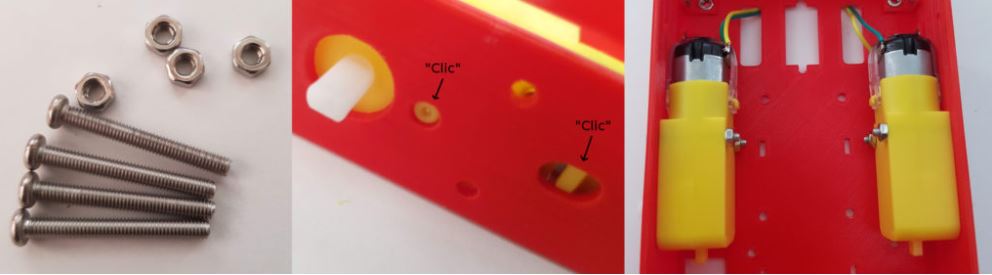
Para evitar que los picos de los motores afecten a la electrónica de la placa, es recomendable soldar un condensador de 0.1µF en los motores :
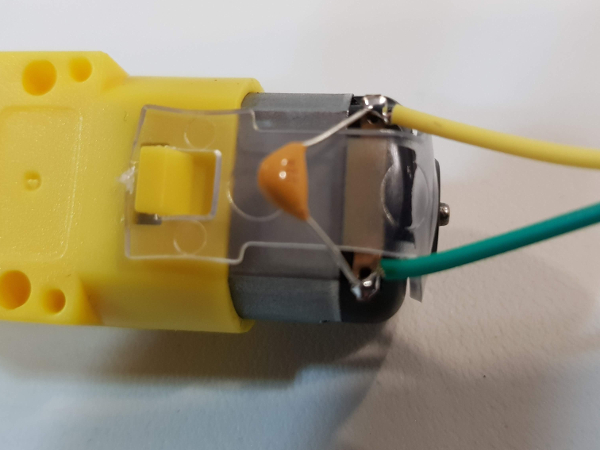
*Fuente: https://mclon.org Maria L CC-BY-SA*
También es conveniente que con un soldador caliente fijes los tornillos en las piezas impresas 3D, te facilitará el montaje (no te pases calentando) o si el orificio es muy grande, usar un pegamento para fijar la tuerca a la pieza 3D:
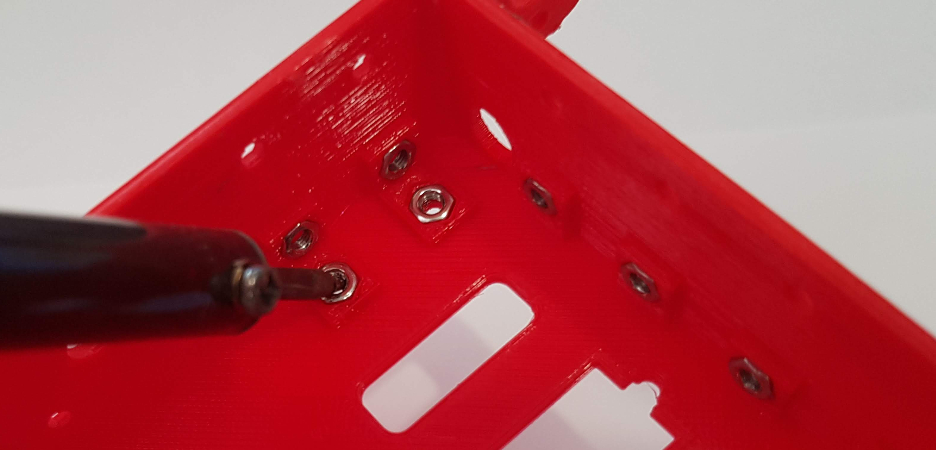
*Fuente: https://mclon.org Maria L CC-BY-SA*
## 3.1.3 Ya realizado por Catedu
Soldado el controlador TB6612FNG
[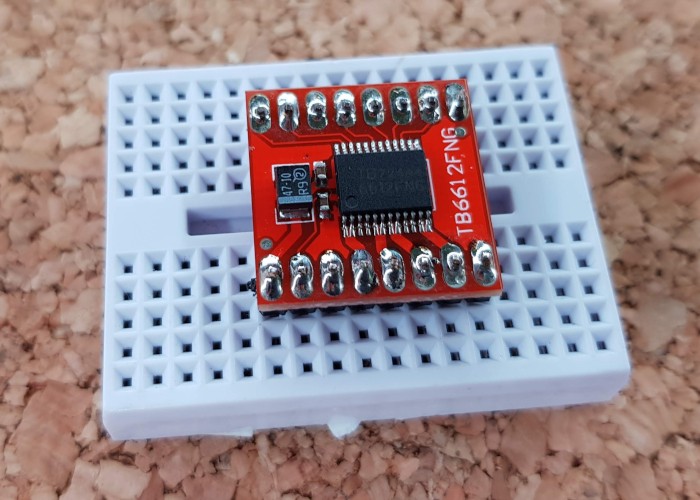](https://libros.catedu.es/uploads/images/gallery/2022-03/image-1648460465377.jpg)
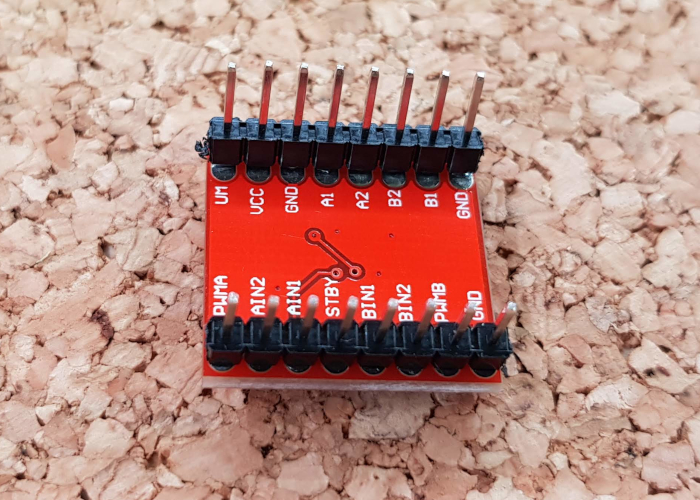
*Fuente: https://mclon.org Maria L CC-BY-SA*
La soldadura en la placa Robodyn
[](https://libros.catedu.es/uploads/images/gallery/2022-03/image-1648460484145.png)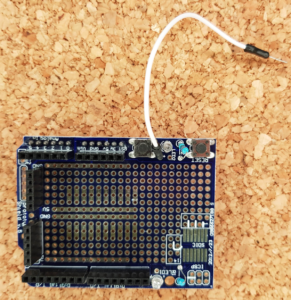
*Fuente: https://mclon.org Maria L CC-BY-SA*
La soldadura entre Echo y Trg del sensor US

*Fuente: https://mclon.org Maria L CC-BY-SA*
# 3.2 Comenzamos
El montaje de este robot es complejo, ánimo !

## 3.2.0 Recomendaciones
Te dejamos el enlace al libro [GUIA DE MONTAJE DEL ROBOT MCLON CC-BY-SA](https://drive.google.com/file/d/1WGXVK7i5bVnbLaxinF6_7Jg61HCseoyL/view?usp=sharing) de Tino Fernandez Cueto
[](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-24-13-59-03-ac896377-0646-4b47-8c0e-bc81958c4324-y-3-paginas-mas-perfil-1-microsoft-edge.png)
## 3.2.1 Seguidor siguelineas y bola loca
Ponemos la bola loca y los seguidores en el soporte con los leds hacia abajo:

*Fuente: https://mclon.org Maria L CC-BY-SA*
Atornilla el sorpote al chasis y conecta los cables pasándolos por el orificio:
[](https://libros.catedu.es/uploads/images/gallery/2022-03/image-1648460589102.jpg)
*Fuente: https://mclon.org Maria L CC-BY-SA*
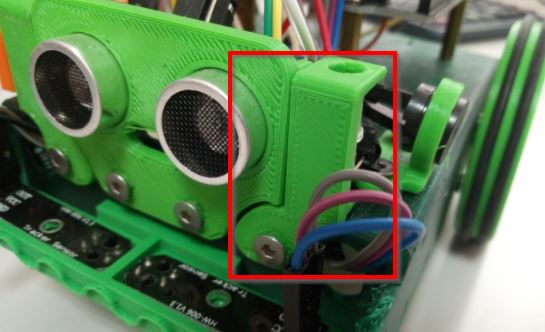
## 3.2.2 Sensor ultrasonidos
El sensor ultrasónico en el soporte, encaja justo para que no se caiga. Pon el soporte con dos tornillos en el chasis:
*Fuente: https://mclon.org Maria L CC-BY-SA*
## 3.2.3 Motores y ruedas
Los motores, con 4 tornillos largos y pasa los cables por los orificios :
*Fuente: https://mclon.org Maria L CC-BY-SA*
Pon las juntas tóricas en las ruedas y pasamos a su colocación: Las ruedas encajan muy justas, esto es así para evitar que con los golpes se desileneen. Hay que presionar con los dedos, si ves que cuesta puedes pasar una lima por el orificio para rebajarlo un poco. Fíjalo con los tornillos.
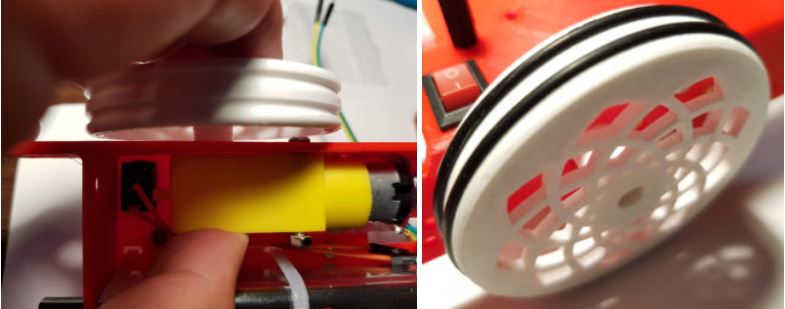
*Fuente: https://mclon.org Maria L CC-BY-SA*
### 3.2.4 placa y accesorios
Pon los soportes de los leds RGB
Pon el soporte del servo al lado izquierdo (mirándolo a los ojos el ultrasonido)
Fija la placa al chasis
*Fuente: https://mclon.org Maria L CC-BY-SA*
Fija el soporte del zumbador al lado derecho (mirándolo a los ojos el ultrasonido):

*Fuente: https://mclon.org Maria L CC-BY-SA*
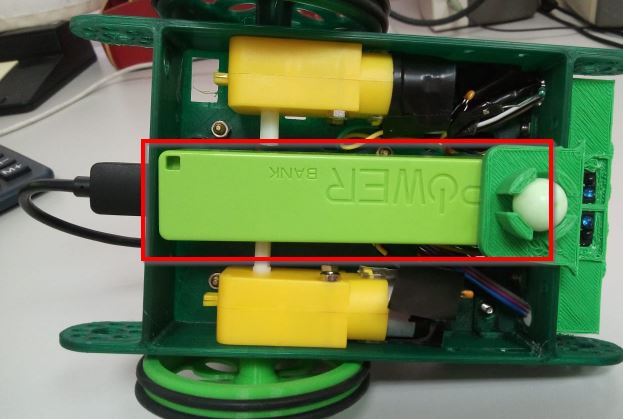
## 3.2.5 Powerbank
El Powerbank se sujeta muy bien, pues en un extremo tiene el cable USB, en el otro extremo tiene la bola loca :
Y podemos poner un velcro para asegurarnos que no se mueva :
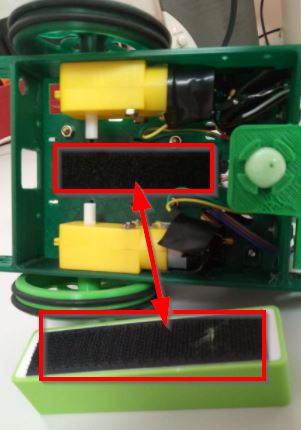
Esto permite sacarlo si fuese necesario, pero para tanto para la carga, conexión y desconexión del mClon no hace falta sacarlo nunca.
- Carga: Conectar el cable USB en el orificio microusb

- Conexión y desconexión del mClon por el puerto USB grande

# 3.3 Cableado esquema
Este es la parte más dificil !!!
[via GIPHY](https://giphy.com/gifs/starwars-3o7abrH8o4HMgEAV9e)
Tenemos que conseguir unir los diferentes elementos con los pines del Robodyn:
- Los pines digitales D0,D1,D2,D3,D4,D5,D6,D7,D8,D9,D10,D11,D12,D13
- Los pines analógicos A0,A1,A2,A3,A4,A5,A6,A7
- Los pines de alimentación GND, VIN
Y tinen que ser estas conexiones y no otras para que sea compatible con mBlock y mBot [planos de mBot](https://tecnoloxia.org/mclon/mbot/) :
## 3.3.1.- Tabla de conexiones
PIN
ELEMENTO
A0
A1
A1
A2
A3
Pines Echo y Trg del sensor ultrasonidos
A4
A5
A6
Al LDR
A7
Pulsador
D1
D2
D3
D4
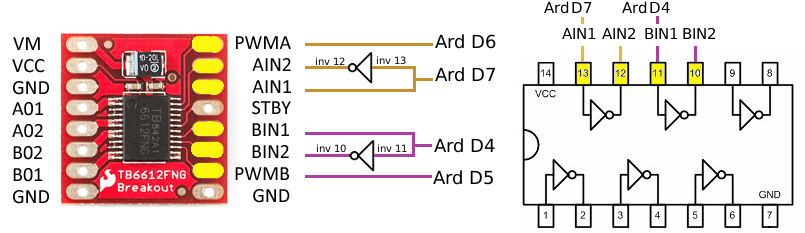
Pin BIN1 del driver B6612FNG y en pin 11 del 7404
D5
Pin PWMB del driver B6612FNG
D6
Pin PWMA del driver B6612FNG
D7
Pin AIN1 del driver B6612FNG y en pin 13 del 7404
D8
Buzzer
D9
Sensor izquierdo siguelineas
D10
Sensor derecho siguelineas
D11
Al servo del brazo
D12
D13
Leds RGB
## 3.3.2.- Esquema elementos básicos

*Fuente: https://mclon.org Maria L CC-BY-SA*
## 3.3.3 Esquema accesorios
Los dos leds RGB
*Fuente: https://mclon.org Maria L CC-BY-SA*
El servo del brazo:

*Fuente: https://mclon.org Maria L CC-BY-SA*
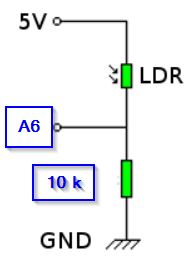
El LDR :
*Fuente: Adaptado de https://mclon.org Maria L CC-BY-SA*
# 3.4 Cableado motores
Tenemos el Robodyn, el escudo Protoboard, cables, el driver motor B6612FNG, el 7404 y una R10k

*Fuente: https://mclon.org Maria L CC-BY-SA*
Recuerda que la placa protoboard, los agujeros están conectados verticalmente a ambos lados, es decir lo rojo está conectado:
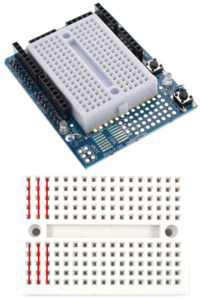
*Fuente: https://mclon.org Maria L CC-BY-SA*
En https://tecnoloxia.org/mclon/electronica/protoshield/ tienes unos consejos para realizar correctamente las conexiones.
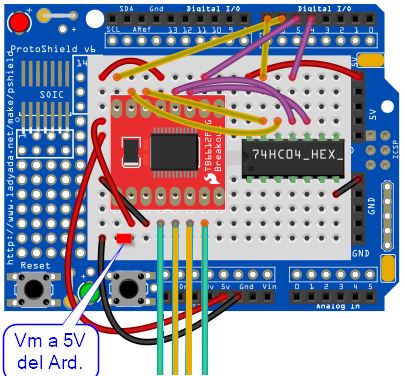
## 3.4.1 Driver motor B6612FNG y 7404
Vamos a conectar este esquema
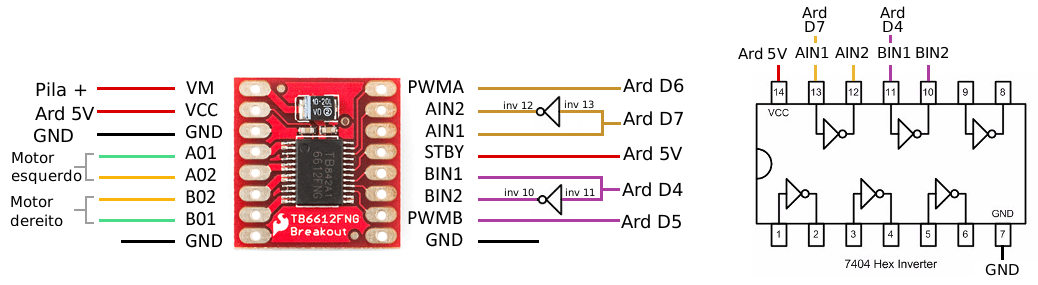
*Fuente: https://mclon.org Maria L CC-BY-SA*
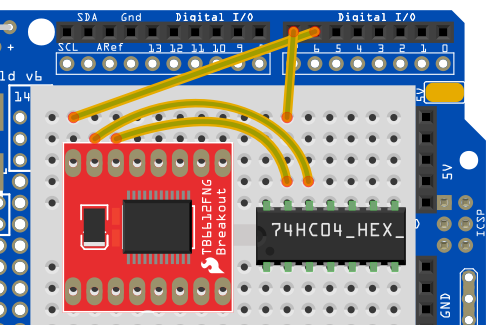
Conecta los chips **dejando dos columnas libres** tal y como indica la figura, y conectamos Vcc y GND en la columna libre de la izquierda:

*Fuente: https://mclon.org Maria L CC-BY-SA*
Ponemos las conexiones de alimentación de los dos chips
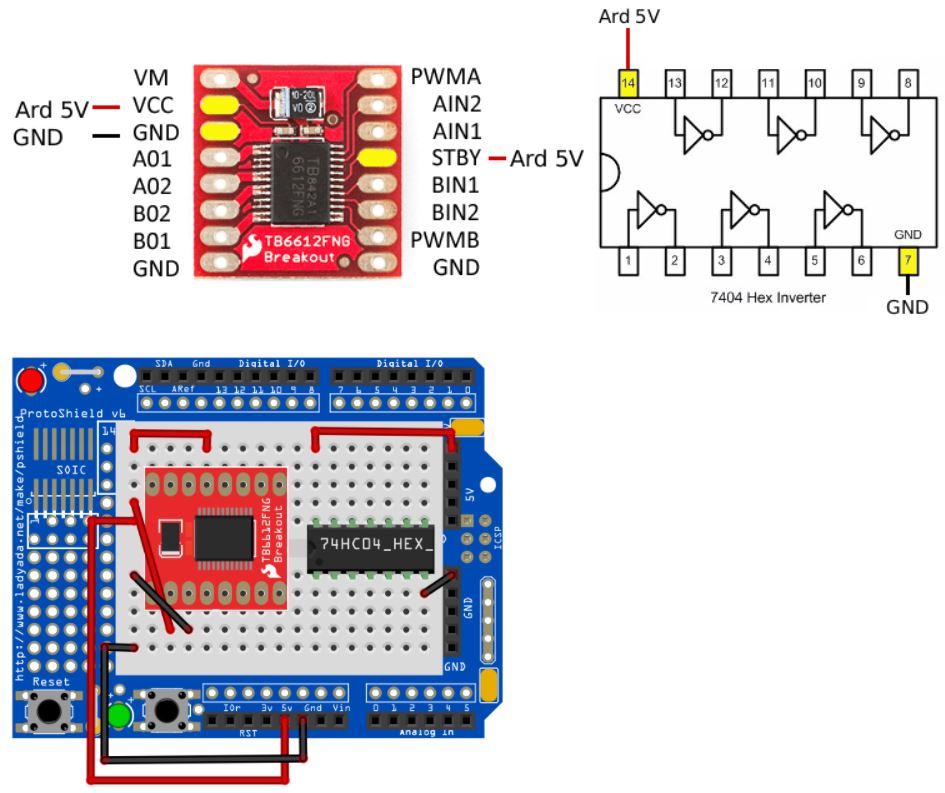
*Fuente: https://mclon.org Maria L CC-BY-SA*
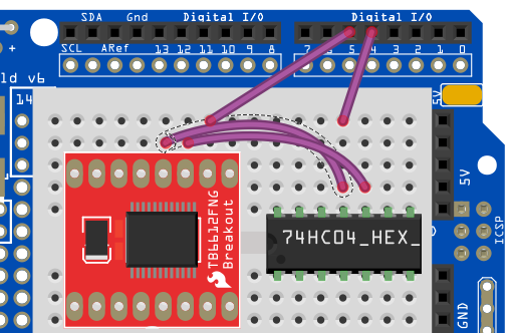
Y ahora conectamos los pines de velocidad y dirección:
*Fuente: https://mclon.org Maria L CC-BY-SA*
Es decir, estos cables que indican en la siguiente figura:
ATENCIÓN, no se han dibujado las conexiones anteriores, para simplificar los dibujos, es decir ,**no** quites los cables anteriores
Primero el motor A
*Fuente: https://mclon.org Maria L CC-BY-SA*
Y luego el motor B
*Fuente: https://mclon.org Maria L CC-BY-SA*
Ahora conectamos los motores **OJO CON LA POLARIDAD** si te equivocas, el motor girará al revés :
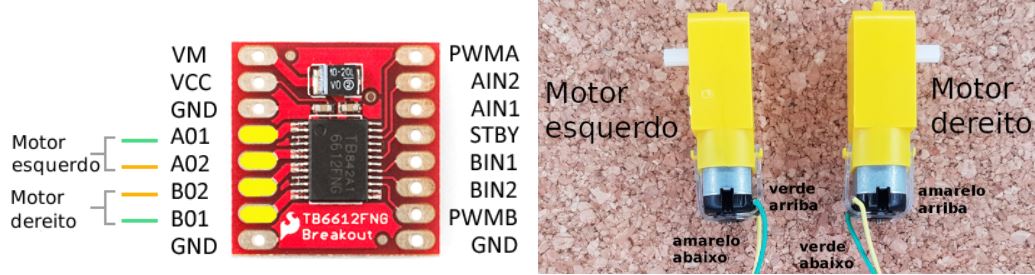
Al alimentar mClon con PowerBank, la tensión de la pila le llega diréctamente al Arduino Robodyn, luego alimentamos Vm con los 5V del Arduino (Vcc ya estaba a 5V)

Luego las conexiones quedan así :
# 3.5 Cableado sensores
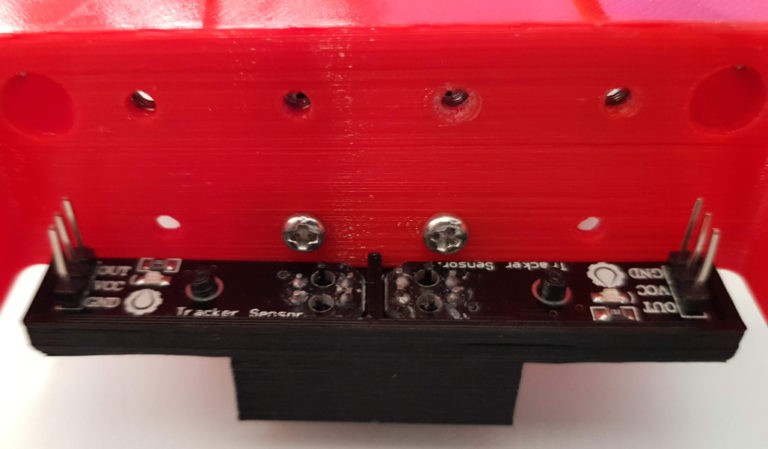
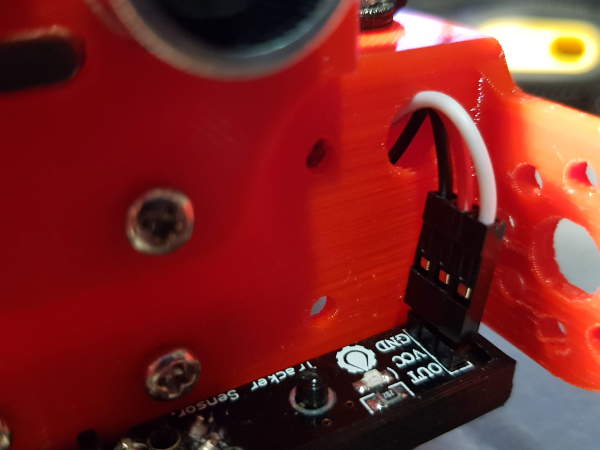
## 3.5.1 Sensores de línea
Se conlocan en el soporte de la cabeza loca, van justos, incluso puede ser no necesario atornillarlos. Tiene 3 pines:
- Vcc al 5V del Arduino.
- GND al GND del Arduino.
- OUT del sensor derecho a D9 mirándolo a los ojos del ultrasonido.
- OUT del sensor izquierdo a D10 mirándolo a los ojos del ultrasonido.

*Fuente: https://mclon.org Maria L CC-BY-SA*

*Fuente: https://mclon.org Maria L CC-BY-SA*
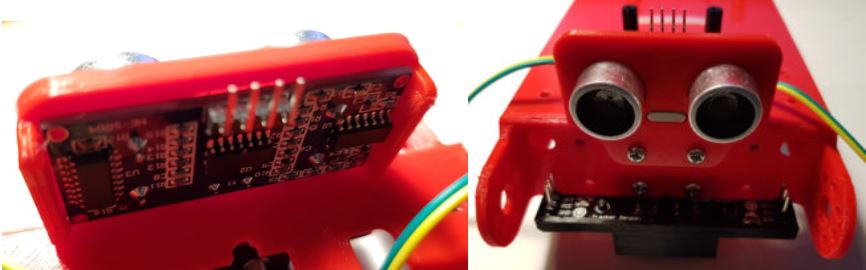
## 3.5.2 Sensor ultrasonidos
Los pines Trig y Echo del sensor **tienen que estar soldados** por lo que se conecta uno de los dos al A3

*Fuente: https://mclon.org Maria L CC-BY-SA*
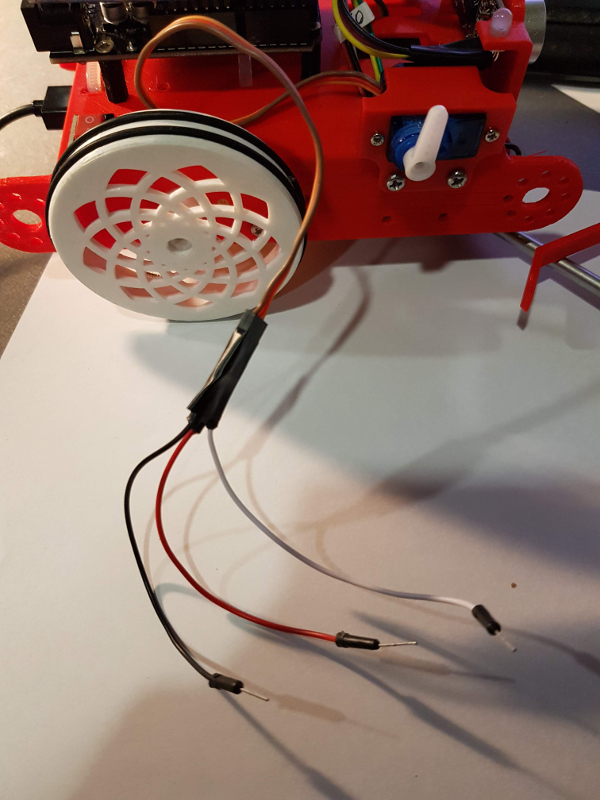
## 3.5.3 Sensor de luz LDR.
Para el sensor de luz, tenemos que hacer el siguiente esquema :
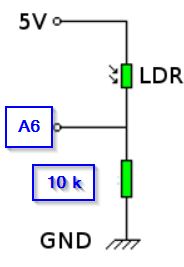
*Fuente: Adaptado de https://mclon.org Maria L CC-BY-SA*
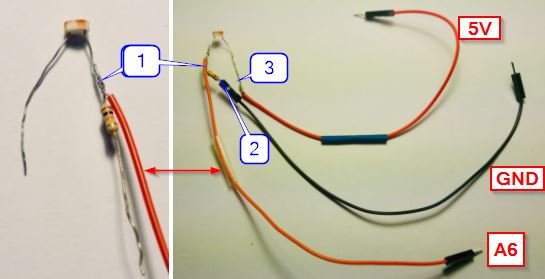
Luego tenemos que hacer los siguientes empalmes, conectados o mejor soldados y aislarlos con una cinta aislante:
1. La resistencia 10k a uno de los pines del LDR y al cable que tiene que ir al A6
2. Un cable Dupond al otro extremo de la R10k que irá a GND del Arduino.
3. Un cable Dupond al otro extremo del LDR que irá al 5V del Arduino.
*Fuente: Adaptado de https://mclon.org Maria L CC-BY-SA*
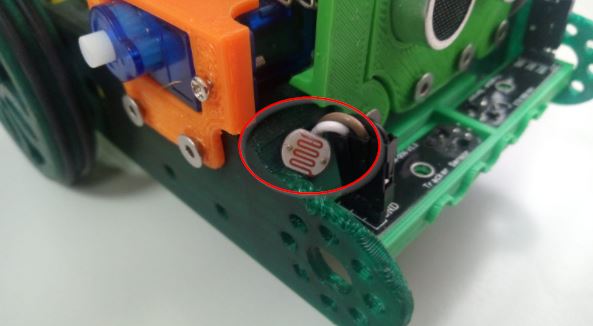
Nuestra propuesta es de sólo **un LDR** pero recuerda que en [2.2](https://catedu.github.io/mClon/propuesta/extras.html) vimos una opción de poner dos LDRs con interesantes propuestas y fácilmente realizable.
Por simplifiación, no se ha impreso en 3D ningún soporte especial LDR al chasis, pero en [https://tecnoloxia.org/mclon/estrutura/impresion-3d/](https://tecnoloxia.org/mclon/estrutura/impresion-3d/) lo tienes por si quieres imprimírtelo. Nosotros proponemos poner la resistencia en la parte debajo del chasis, pasar los cables hacia el escudo Protoboard por los numerosos agujeros que hay en el chasis, y pasar el LDR por el agujero de los cables del sensor siguelíneas :
# 3.6 Cableado accesorios
## 3.6.1 Pulsador
El pulsador lo tenemos que conectar al A7 que no tiene Arduino, por eso nuestra propuesta es con Robotyn, y para ello utilizaremos la segunda columna que dejamos libre en el Protoboard :
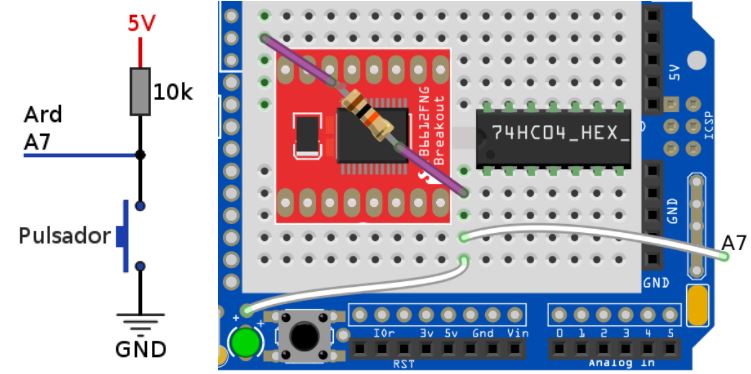
*Fuente: https://mclon.org Maria L CC-BY-SA*
Recuerda que el A7 lo dejastes preparado en [3.1 Pasos previos](https://libros.catedu.es/books/regalate-un-mclon/page/31-pasos-previos "3.1 Pasos previos")
**E**vita que los pines de la resistencia 10K toquen los pines del controlador, puedes poner una cinta aislante.
## 3.6.2 El zumbador
Es sencillo, simplemente conéctalo a D8 y el otro a masa :
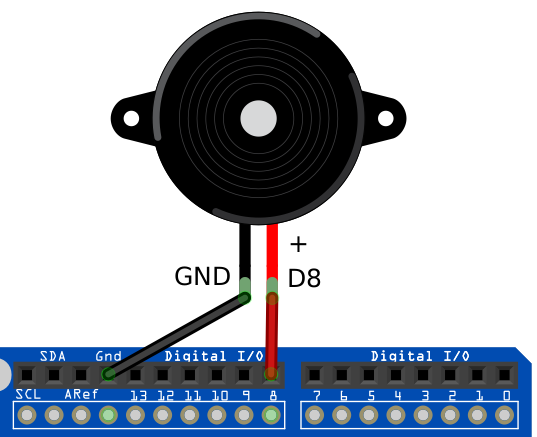
*Fuente: https://mclon.org Maria L CC-BY-SA*
# 3.7 Cableado extras
Vamos a utilizar los famosos **LED NEOPIXEL**, el origen de este nombre es de la compañía ADAFRUIT y son leds de tres colores, que dentro tienen un integrado que permite mandar secuencialmente órdenes a los siguientes, con lo que puedes hacer tiras de leds tan largo como desees y con multitud de posibilidades de juegos de luces disponibles.
En el mClon sólo vamos a trabajar con dos leds, uno recibirá el orden del Arduino por su pata IN,, y se lo comunicará al otro led por su pata OUT al IN del segundo led, y el segundo led, su pata OUT se queda sin conectar pero podríamos seguir la secuencia tanto como quisiéramos.
Si quieres saber más te recomendamos la página de [e-Ika ](https://blog.e-ika.com/index.php/2020/03/03/neopixel/)y la de [Luis Llamas ](https://www.luisllamas.es/arduino-led-rgb-ws2812b/)
## 3.7.1 Aclaración sobre estos leds RGB
Tienes **dos tipos FIJATE cual tienes pues el patillaje cambia**
- APA 106-F5 de 5mm
- APA 106-F8 de 8mm
Realmente NO SON RGB SINO SON **GRB**, luego salen cambiados, el ROJO con el VERDE es decir, cuando pides rojo, sale verde y cuando pides verde sale rojo, en el azul está bien
En [https://tecnoloxia.org/mclon/extras/luces-de-cores/](https://tecnoloxia.org/mclon/extras/luces-de-cores/) tienes una explicación de todos los valores a utilizar y los colores que se obtienen.
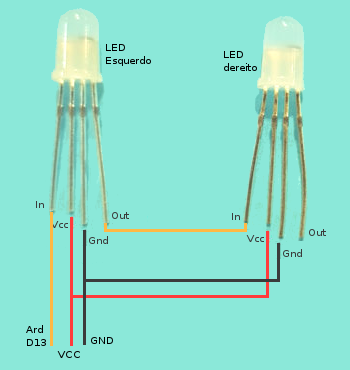
### 3.7.1.1 APA - F5 de 5mm
Es lo más recomendable, estos leds RGB tienen esta configuración :
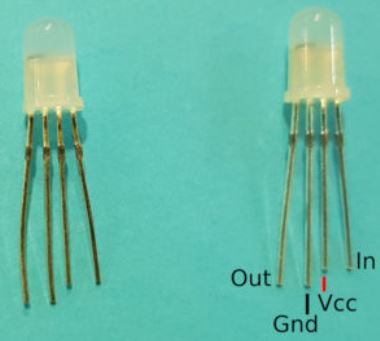
*Fuente: https://mclon.org Maria L CC-BY-SA*

Fuente: Datasheet
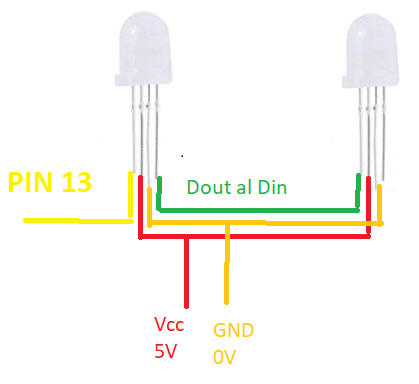
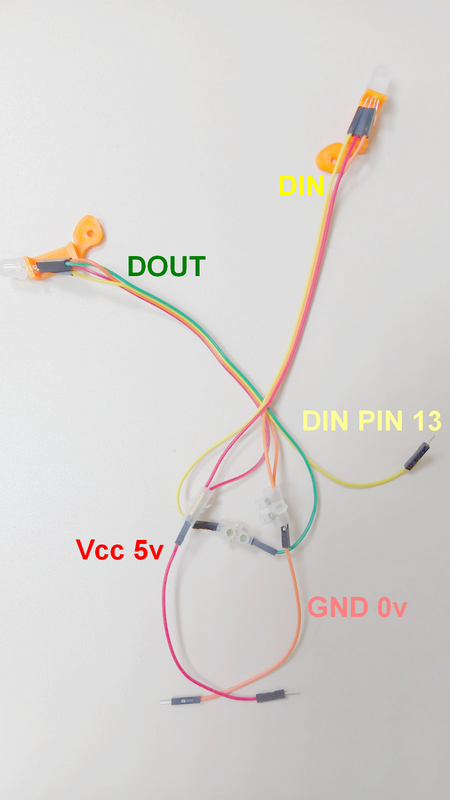
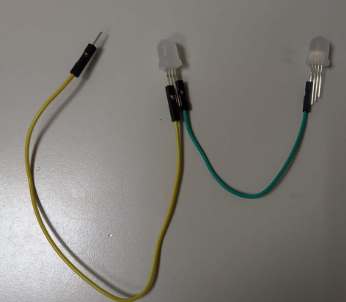
Con cables Dupond y con ayuda de regletas, podemos hacer la siguiente conexiones :
- Los dos Vcc conectados y al Vcc de la placa 5V
- Los dos GND conectados y al GND de la placa 0V
- El Din de un led al pin 13 de la placa Arduino
- El Dout de ese led al Din del otro led
- El Din del otro led sin conectar
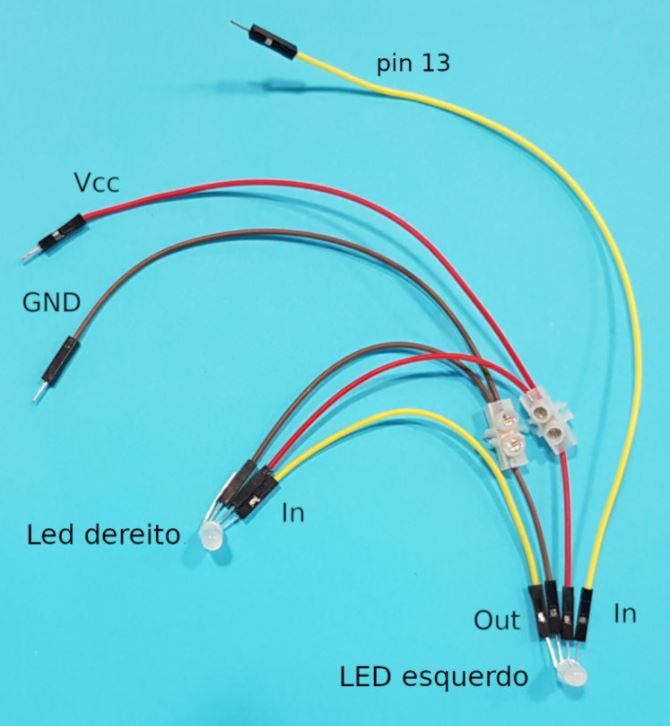
*Fuente: https://mclon.org Maria L CC-BY-SA*
*Sujeta las conexiones de los cables Dupond y los leds RGB con cinta aislante para que no se desconecten.*
Y los colocas en el chasis en sus soportes :
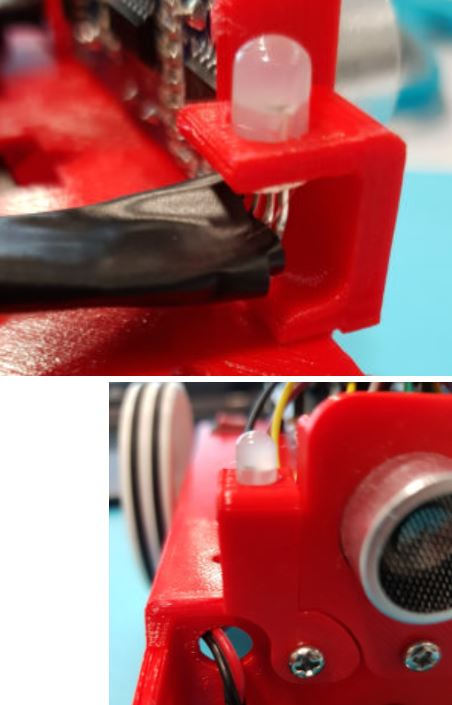
*Fuente: https://mclon.org Maria L CC-BY-SA*
Conecta el cable rojo a 5V, el negro a GND y el amarillo al pin 13, y voila !!
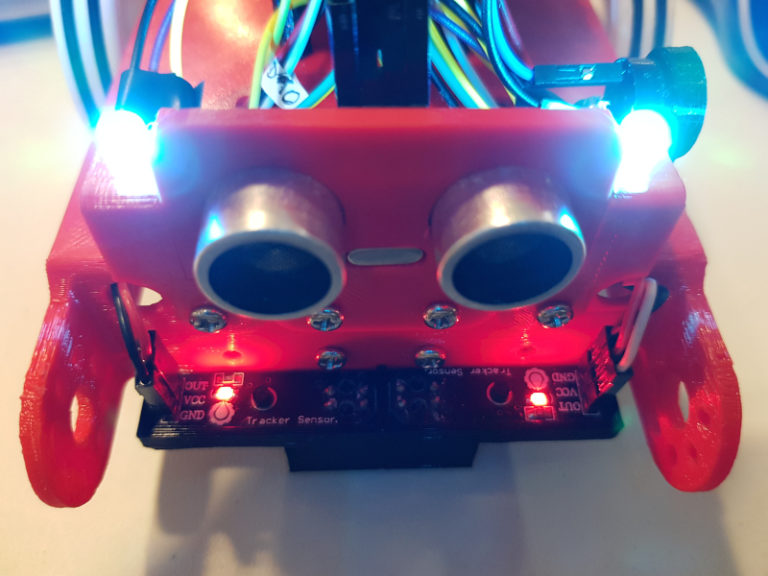
*Fuente: https://mclon.org Maria L CC-BY-SA*
### 3.7.1.2 APA - F8 de 8mm
En este caso, el led no cabe por el hueco, tienes que ponerlo por encima:

Y su configuración de pines **es diferente** al APA-106-F5 :

Luego la conexión es :
- Los dos Vcc conectados y al Vcc de la placa 5V
- Los dos GND conectados y al GND de la placa 0V
- El Din de un led al pin 13 de la placa Arduino
- El Dout de ese led al Din del otro led
- El Din del otro led sin conectar
Las regletas nos las podemos ahorrar utilizando diferentes agujeros de la placa Protoboard y la conexión Din-Dout entre los leds con un cable Dupont H-H, en la foto se omiten los cables +5V y GND por simplificar
[](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-21-20-10-11-window.jpg)
Una vez conectado, para que los cables Dupond no se salgan, puedes poner una cinta de celo
[](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-20-11-58-15-whatsapp-y-2-paginas-mas-perfil-1-microsoft-edge.png)
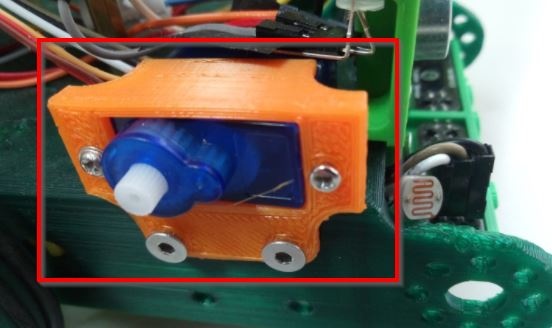
### 3.7.2 Brazo robot: Servomotor
Coloca el servomotor en su soporte usando los tornillos que vienen en su bolsa:
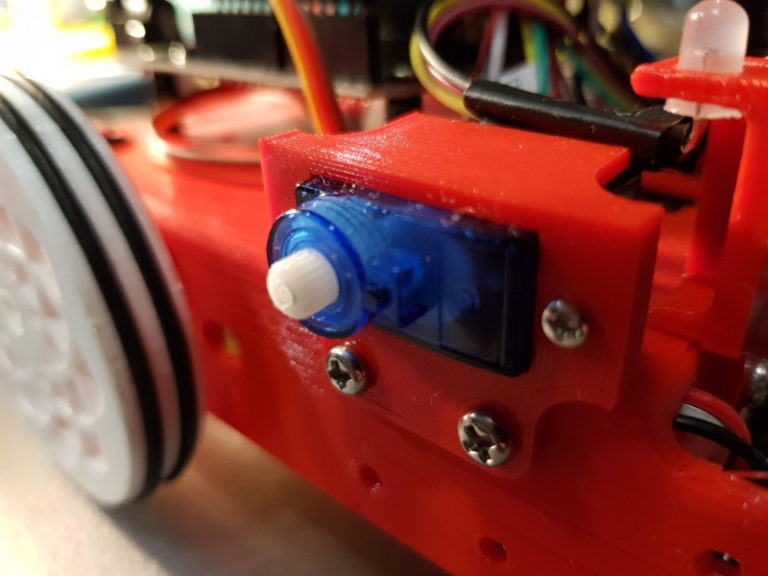
*Fuente: https://mclon.org Maria L CC-BY-SA*
Normalmente los colores de los cables del servo tienen este significado :
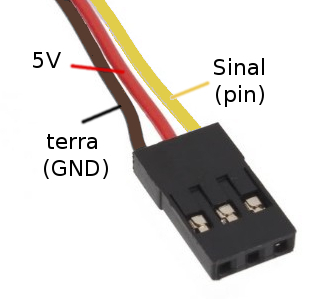
*Fuente: https://mclon.org Maria L CC-BY-SA*
Lo uniremos con 3 cables Dupond Macho-Macho y lo fijaremos con cinta aislante :
*Fuente: https://mclon.org Maria L CC-BY-SA*
Y conectaremos el cable amarillo Señal **al pin D11** para poder usar la instrucción (si queremos que sea slot2 o banco2 ponerlo a D12):

Finalmente colocamos el brazo, en el capitulo 4.5 lo calibraremos de forma que
- El ángulo de 0º corresponde a posición horizontal
- El ángulo de 90º corresponde a posición vertical
Una vez identificado cual es el ángulo 90ª ejecutando la instrucción anterior, y una vez puesto el servo en esa posición, poner el brazo levantado con un ligero ángulo hacia delante, tal y como indica la figura :

*Fuente: Adaptado de https://mclon.org Maria L CC-BY-SA*
*Puedes poner un tornillo en para asegurarlo o no ponerlo para quitar el brazo y ponerlo con facilidad para que sea más cómodo el almacenaje del robot.*