Realmente NO SON RGB SINO SON **GRB**, luego salen cambiados, el ROJO con el VERDE es decir, cuando pides rojo, sale verde y cuando pides verde sale rojo, en el azul está bien
*Sujeta las conexiones de los cables Dupond y los leds RGB con cinta aislante para que no se desconecten.*
Y los colocas en el chasis en sus soportes : 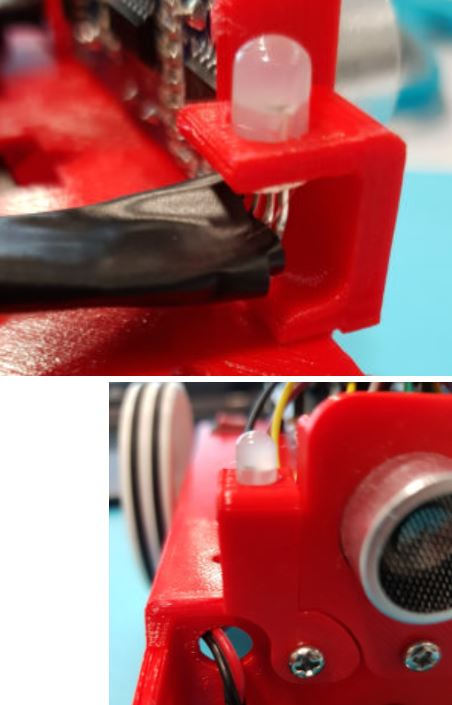 *Fuente: https://mclon.org Maria L CC-BY-SA* Conecta el cable rojo a 5V, el negro a GND y el amarillo al pin 13, y voila !! 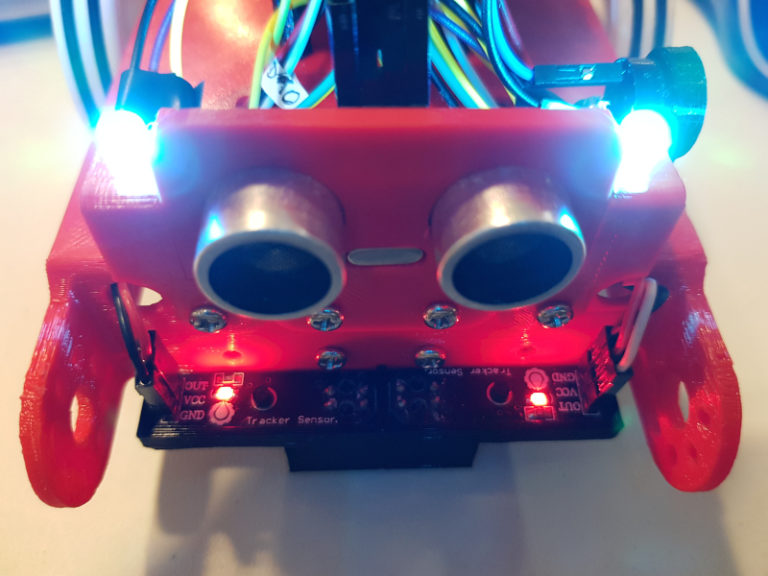 *Fuente: https://mclon.org Maria L CC-BY-SA* ### 3.7.1.2 APA - F8 de 8mm En este caso, el led no cabe por el hueco, tienes que ponerlo por encima:  Y su configuración de pines **es diferente** al APA-106-F5 :  Luego la conexión es : - Los dos Vcc conectados y al Vcc de la placa 5V - Los dos GND conectados y al GND de la placa 0V - El Din de un led al pin 13 de la placa Arduino - El Dout de ese led al Din del otro led - El Din del otro led sin conectar 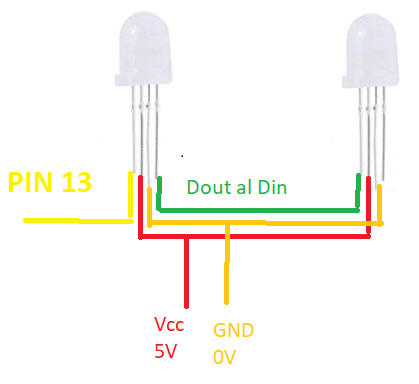 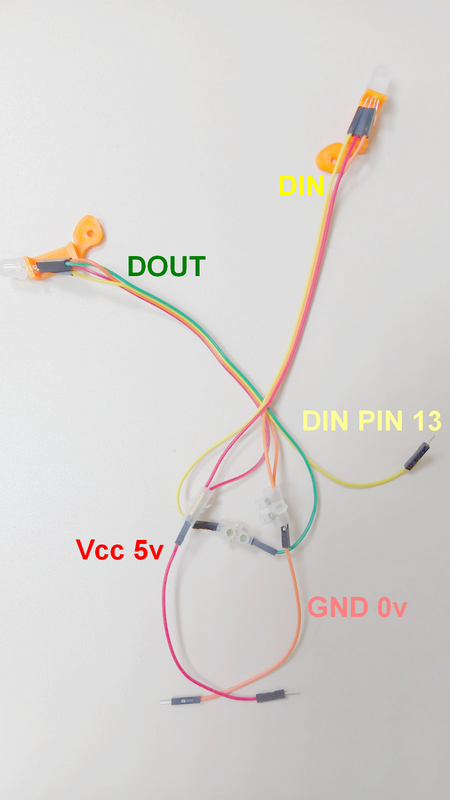 Las regletas nos las podemos ahorrar utilizando diferentes agujeros de la placa Protoboard y la conexión Din-Dout entre los leds con un cable Dupont H-H, en la foto se omiten los cables +5V y GND por simplificar [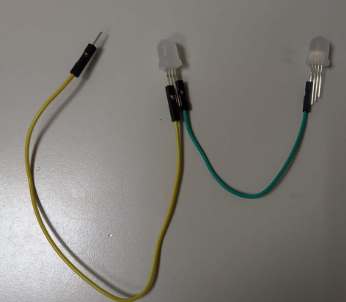](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-21-20-10-11-window.jpg) Una vez conectado, para que los cables Dupond no se salgan, puedes poner una cinta de celo [](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-20-11-58-15-whatsapp-y-2-paginas-mas-perfil-1-microsoft-edge.png) ### 3.7.2 Brazo robot: Servomotor Coloca el servomotor en su soporte usando los tornillos que vienen en su bolsa: 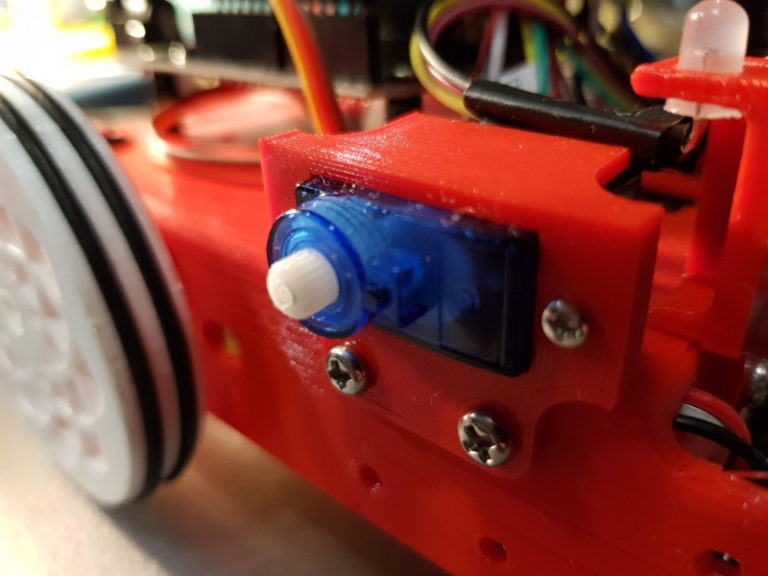 *Fuente: https://mclon.org Maria L CC-BY-SA* Normalmente los colores de los cables del servo tienen este significado : 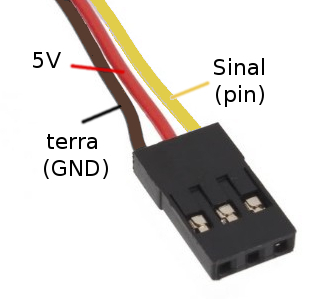 *Fuente: https://mclon.org Maria L CC-BY-SA* Lo uniremos con 3 cables Dupond Macho-Macho y lo fijaremos con cinta aislante : 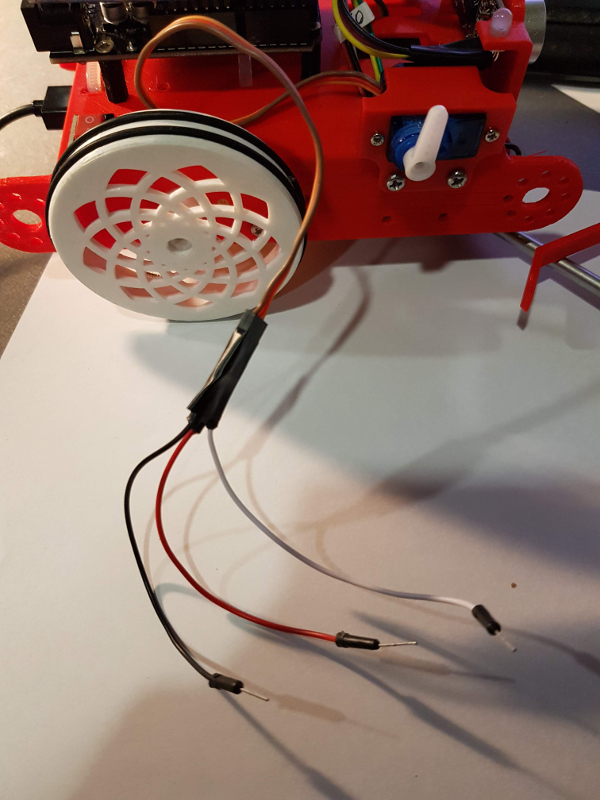 *Fuente: https://mclon.org Maria L CC-BY-SA* Y conectaremos el cable amarillo Señal **al pin D11** para poder usar la instrucción (si queremos que sea slot2 o banco2 ponerlo a D12):  Finalmente colocamos el brazo, en el capitulo 4.5 lo calibraremos de forma que - El ángulo de 0º corresponde a posición horizontal - El ángulo de 90º corresponde a posición vertical Una vez identificado cual es el ángulo 90ª ejecutando la instrucción anterior, y una vez puesto el servo en esa posición, poner el brazo levantado con un ligero ángulo hacia delante, tal y como indica la figura :  *Fuente: Adaptado de https://mclon.org Maria L CC-BY-SA**Puedes poner un tornillo en para asegurarlo o no ponerlo para quitar el brazo y ponerlo con facilidad para que sea más cómodo el almacenaje del robot.*