# Control velocidad
# 3 Control velocidad

# 3.1 ¿Cómo funciona?
Las ruedas tienen un disco con agujeros, una parte es un diodo emisor de IR y el otro es un sensor fotoeléctrico tipo WYC-H206 que detecta los agujeros:
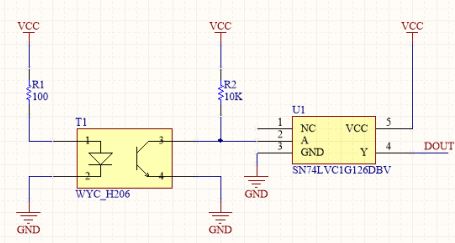
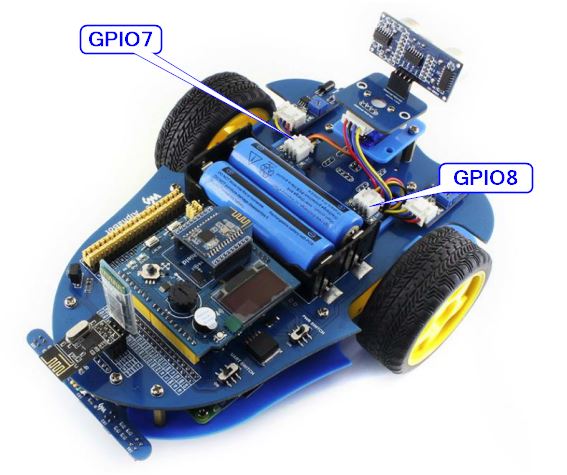
Están conectados a los siguientes GPIO: \* Motor derecha GPIO7 \* Motor izquierda GPIO8
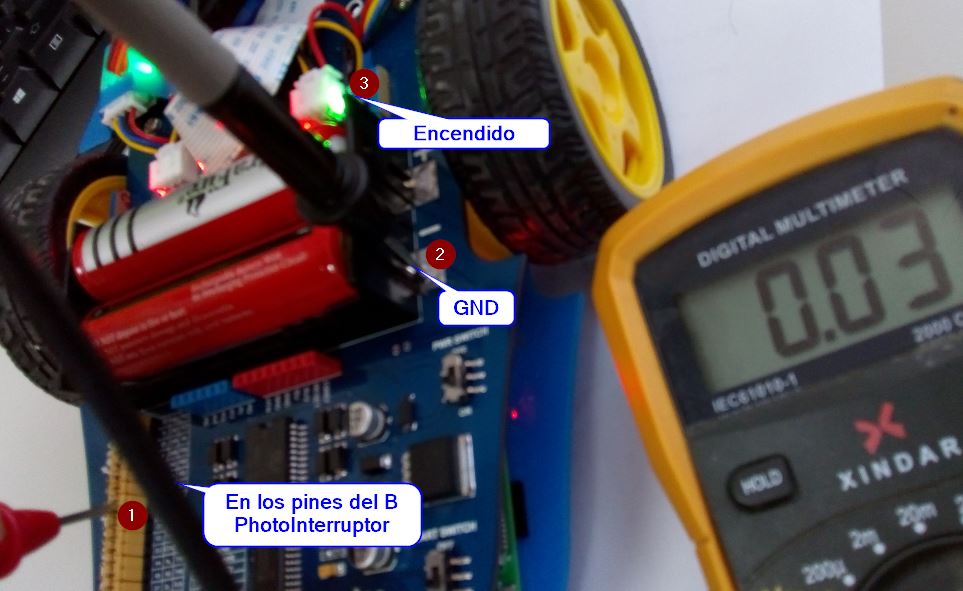
Si te fijas en el esquema anterior, las resistencias, están con la configuración **PULL-UP** ([aquí para saber +](https://catedu.github.io/programa-arduino-mediante-codigo/resistencias_pullup_y_pulldown.html) en el curso Arduino) ¿qué significa esto? pues que van al revés, cuando el circuito está encendido, o sea detecta agujero, estado ON transmite un 0 lógico, y al revés, cuando está apagado OFF transmite un 1 lógico, lo puedes ver mejor en estas fotografías:
# 3.2 Prueba velocidad
En el siguiente vídeo vemos como cuando el sensor está encendido, el programa detecta un 0 y si el sensor está apagado, el programa detecta un 1:
Fichero [Pruebasensorvelocidad.py](https://github.com/JavierQuintana/AlphabotPython/)
El programa es el siguiente:
```cpp+lineNumbers:true
import RPi.GPIO as GPIO
DataMotorR = 7
DataMotorL = 8
GPIO.setmode(GPIO.BCM)
GPIO.setup(DataMotorR,GPIO.IN)
GPIO.setup(DataMotorL,GPIO.IN)
for i in range(100000):
print('\nMotor derecha :',GPIO.input(DataMotorR))
print('\nMotor izquierda :',GPIO.input(DataMotorL))
```
## Segundo test de contador
En el segundo vídeo vídeo vemos como un simple contador puede detectar el paso del 1 al 0:
El programa es el siguiente:
Fichero [Pruebasensorvelocidad-2.py](https://github.com/JavierQuintana/AlphabotPython/)
```cpp+lineNumbers:true
import RPi.GPIO as GPIO
DataMotorR = 7 DataMotorL = 8
GPIO.setmode(GPIO.BCM)
GPIO.setup(DataMotorR,GPIO.IN) GPIO.setup(DataMotorL,GPIO.IN)
contador=0 repetido=0 num = 100 while (contador<num): if((GPIO.input(DataMotorR)==1)and(repetido==0)): contador=contador+1 print('\\nContador :',contador) repetido=1 if(GPIO.input(DataMotorR)==0): repetido=0 ```
# 3.3 Variables.py
Añadimos ahora las varialbes de paso siguientes a este fichero
[VARIABLES.py](https://github.com/JavierQuintana/AlphabotPython/blob/master/VARIABLES.py)
import RPi.GPIO as GPIO
**DataMotorR = 7 DataMotorL = 8**
IN1=12 IN2=13 ENA=6 IN3=20 IN4=21 ENB=26
###### \########CONFIGURACION GPIO ENTRADAS SALIDAS
GPIO.setmode(GPIO.BCM) GPIO.setwarnings(False) GPIO.setup(IN1,GPIO.OUT) GPIO.setup(IN2,GPIO.OUT) GPIO.setup(IN3,GPIO.OUT) GPIO.setup(IN4,GPIO.OUT) GPIO.setup(ENA,GPIO.OUT) GPIO.setup(ENB,GPIO.OUT)
**GPIO.setup(DataMotorR,GPIO.IN) GPIO.setup(DataMotorL,GPIO.IN)**
###### \##################### VELOCIDAD DE LOS MOTORES
PWMA = GPIO.PWM(ENA,500) PWMB = GPIO.PWM(ENB,500) ```
# 3.4 MOVIMIENTOSPASO.py
Vamos a hacer una pequeña función donde le pasemos dos argumentos por cada motor (en total 4 argumentos): velocidad y número de pasos. Tiene que hacer:
- Si el número de pasos es positivo va hacia delante el motor.
- Si el paso es negativo es que el motor va hacia atrás.
- Los motores funcionarán con la velocidades dadas en los argumentos.
- En total 4 argumentos tiene la función, dos para cada motor R y L: *velR,numR,velL,numL* donde *vel* es la velocidad del motor y *num* el número de pasos.
¿Te atreves? Sino, mira la solución:
%accordion%Solución%accordion%
Fichero [MOVIMIENTOSPASO.py](https://github.com/JavierQuintana/AlphabotPython/)
```cpp+lineNumbers:true
import RPi.GPIO as GPIO
import time
import MOVIMIENTOS
from VARIABLES import *
###################################################################
#####################FUNCIóN AMBOS#################################
###################################################################
def BOTH(velR,numR,velL,numL):
repetidoR=0
repetidoL=0
if (numR>0):
GPIO.output(IN1,GPIO.HIGH)
GPIO.output(IN2,GPIO.LOW)
else:
numR=-numR
GPIO.output(IN1,GPIO.LOW)
GPIO.output(IN2,GPIO.HIGH)
if (numL>0):
GPIO.output(IN4,GPIO.HIGH)
GPIO.output(IN3,GPIO.LOW)
else:
numL=-numL
GPIO.output(IN4,GPIO.LOW)
GPIO.output(IN3,GPIO.HIGH)
contadorR=0
contadorL=0
while ((contadorR
```
# 3.5 Movimientos con paso
Vamos a hacer un programa para utilizar la librería anterior MOVIMIENTOSPASO.py y gobernado por el teclado *numérico*:
- PARAR = tecla 5
- ADELANTE=FORDWARD = 8
- ATRAS=BACKWARD = 2
- DERECHA=RIGHT = 6
- IZQUIERDA=LEFT = 4
Fijaremos de antemano las velocidades y el paso a 50 y 10 por ejemplo.