# Sensor obstáculos IR
# 4 Sensor obstáculos IR

# 4.1 ¿Cómo funciona?
Lo primero que tenemos que hacer es ajustar su sensibilidad con el potenciómetro que tiene de tal manera que detecte de forma correcta un obstáculo:
ES MUY SENSIBLE el punto está justo cuando se apaga:
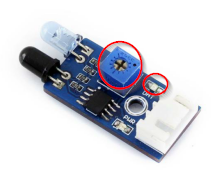
Tiene un led de infrarrojos que cuando hay un obstáculo delante del sensor, refleja esta radiacción y el otro LED (realmente no se podría decir que es LED pues no emite, se tendría que llamar unión PN semiconductor), es un sensor receptor que lo detecta. Un chip comparador LM393 detecta la señal y su sensibilidad se ajusta con el potenciómetro:
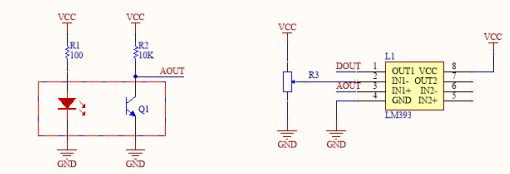
La salida DOUT de cada LM393 están conectados a los siguientes puertos GPIO:
- Derecha GPIO 16
- Izquierda GPIO 19
Una vez más vemos que la resistencias del sensor están tipo PULL-UP luego cuando detecta emitirá un 0 lógico y cuando no detecta emitirá un 1 lógico.
# 4.2 Test
Ejecutamos este pequeño programa:
Fichero [4-2-TestObstaculoIR.py](https://github.com/JavierQuintana/AlphabotPython/)
```cpp+lineNumbers:true
import RPi.GPIO as GPIO
import time
DR = 16
DL = 19
GPIO.setmode(GPIO.BCM)
GPIO.setup(DR,GPIO.IN)
GPIO.setup(DL,GPIO.IN)
for i in range(10000):
print('\nSensor derecha :',GPIO.input(DR))
print('\nSensor izquier :',GPIO.input(DL))
```
Y podemos ver en el vídeo que emite un 0 cuando detecta un obstáculo:
# 4.3 Variables.py
## Añadimos más variables a VARIABLES.py
Los marcados en negrita:
---
import RPi.GPIO as GPIO
###### \#####MOTORES
IN1=12 IN2=13 ENA=6 IN3=20 IN4=21 ENB=26
###### \##SENSOR VELOCIDAD MOTORES
DataMotorR = 7 DataMotorL = 8
**\##########SENSOR OBSTACULOS IR DR = 16 DL = 19**
###### \########CONFIGURACION GPIO ENTRADAS SALIDAS
GPIO.setmode(GPIO.BCM) GPIO.setwarnings(False)
###### \###################MOTORES
GPIO.setup(IN1,GPIO.OUT) GPIO.setup(IN2,GPIO.OUT) GPIO.setup(IN3,GPIO.OUT) GPIO.setup(IN4,GPIO.OUT) GPIO.setup(ENA,GPIO.OUT) GPIO.setup(ENB,GPIO.OUT)
###### \############## VELOCIDAD DE LOS MOTORES
PWMA = GPIO.PWM(ENA,500) PWMB = GPIO.PWM(ENB,500)
###### \############SENSOR VELOCIDAD MOTORES
GPIO.setup(DataMotorR,GPIO.IN) GPIO.setup(DataMotorL,GPIO.IN)
**\####################SENSORES OBSTACULOS IR GPIO.setup(DR,GPIO.IN) GPIO.setup(DL,GPIO.IN)**
# 4.4 Roomba
Bueno ahora hay que hacer el típico programa que evite los obstáculos. Ya sabes detectar los obstáculos, ya sabes controlar el movimiento ¿a qué esperas?
[via GIPHY](https://giphy.com/gifs/adventure-roomba-kviKlWqjoBdCw)
#### Solución
La solución no es única, una propuesta es hacerlo con las librerías que hemos aprendido: \* Ponemos las librerías fichero [MOVIMIENTOS.py](/24-libreria-movimientospy.md) y [MOVIMIENTOSPASO.py](/34-movimientospasopy.md) en la misma carpeta que vamos a crear este programa y las incorporamos en el programa con **import**. \* También incorporamos las variables definidas en **VARIABLES.py**\* Si no detecta nada, que sigua hacia delante. \* Si detecta algo, según los dos o uno, que de unos pasos atrás y que gire.
%accordion%Solución%accordion%
Fichero [Roomba.py](https://github.com/JavierQuintana/AlphabotPython/)
```cpp+lineNumbers:true
import RPi.GPIO as GPIO
import time
from VARIABLES import *
import MOVIMIENTOS
import MOVIMIENTOSPASO
while True:
sensorR= not (GPIO.input(DR))
sensorL= not (GPIO.input(DR))
if not(sensorR and sensorL):
MOVIMIENTOS.FORDWARD(50)
if (sensorR and sensorL):
MOVIMIENTOSPASO.BOTH(50,-10,50,-10)
if (sensorR and not(sensorL)):
MOVIMIENTOSPASO.BOTH(50,-5,50,-5)
MOVIMIENTOSPASO.BOTH(40,-5,40,5)
if (not(sensorR) and (sensorL)):
MOVIMIENTOSPASO.BOTH(50,-5,50,-5)
MOVIMIENTOSPASO.BOTH(40,5,40,-5)
```
%/accordion%
# 4.5 Posibilidad ultrasonidos
Se puede conseguir más precisión añadiendo un tercer sensor y mucho más preciso: El **sensor de Ultrasonidos.** 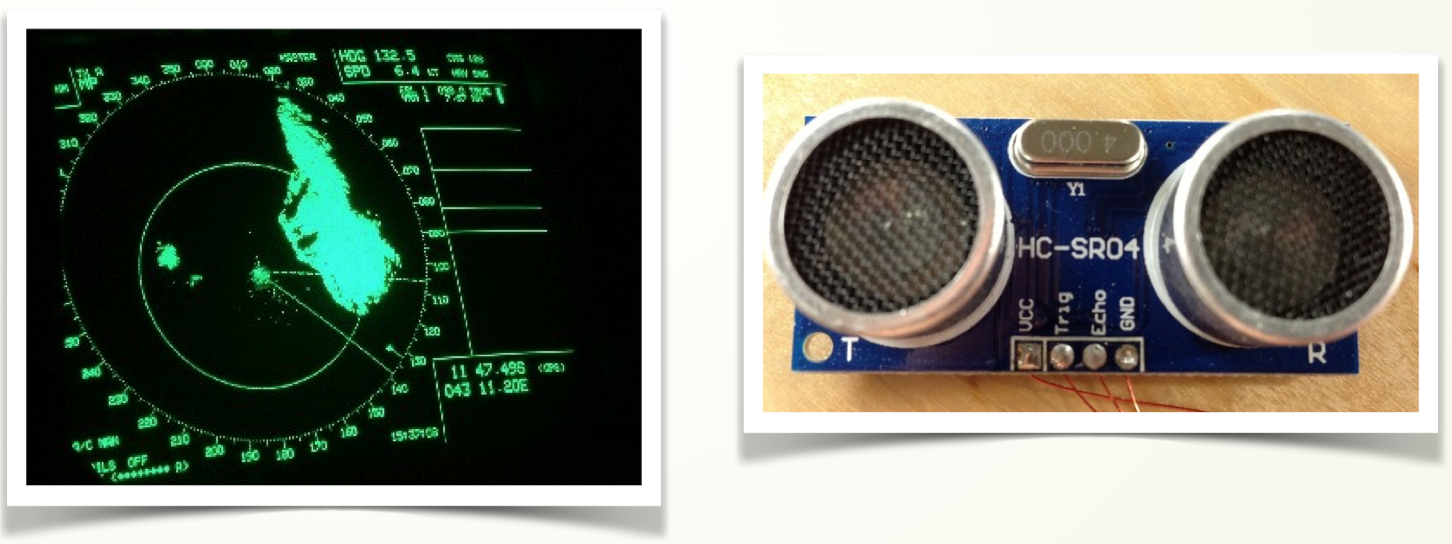
Mira en [esta página](https://catedu.github.io/programa-arduino-mediante-codigo/sensor_de_ultrasonidos.html) para saber cómo se utiliza con el Arduino.
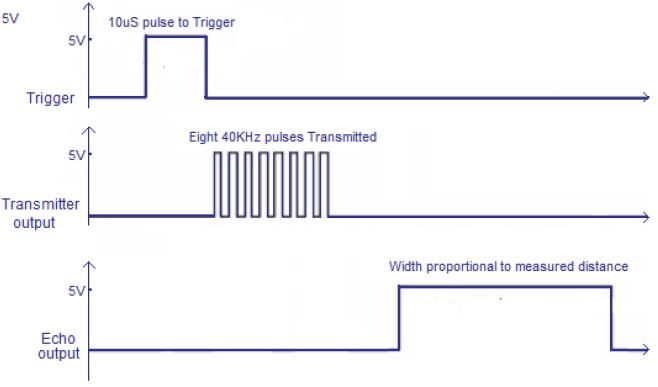
Básicamente se emite un pulso por el pin **Trigger**, él emite una señal de 40kHz y según el eco recibido saca por **Output** un pulso cuyo ancho es proporcional a la distancia:
## Conexión en alphabot
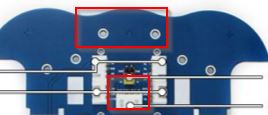
En Alphabot se conectaría los cables en el conector blanco de abajo y el ultrasonidos con unos tornillos en los dos agujeros de la parte delantera:
El sensor de ultrasonidos tiene que estar adaptado a los cables compatibles con la Shield Grove de Arduino. Por ejemplo [este](https://www.seeedstudio.com/Grove-Ultrasonic-Ranger-p-960.html):

CHAPUZA : No tiene su [orden standard GND-Vcc-DATA1-DATA2](http://wiki.seeedstudio.com/Grove_System/) sino es GND-DATA1-DATA2-VCC o sea GND-Trg-Echo-5V luego habría que hacer alguna chapucilla de intercambiar cables, habría que elegir unos cables largos, cortarlos e intercambiarlos:

Para sujetar el sensor ultrasonidos al chasis habría que comprar un soporte:

Otra opción es quitar la cámara y poner el sensor de ultrasonidos:

EL KIT DE CATEDU NO PROPORCIONA EL SENSOR ULTRASONIDOS
### Bueno, si aún así me decido ponerlo ¿cómo se programa?
Muy fácil, el conector blanco de abajo está conectado con los siguientes GPIO:
- Echo en el GPIO 5
- Trigger en el GPIO 17
Por lo tanto, viendo la teoría, una posible función en código Python para utilizarlo sería:
- Emitir un pulso alto por TRIG durante 15 microsegundos.
- Esperar el pulso alto de ECHO
- Cronometrar el pulso alto de ECHO
- La distancia será velocidad por tiempo o sea: la diferencia el tiempo del pulso ECHO multiplicado por la velocidad del sonido y dividido por 2 pues es el recorrido del sonido ida y vuelta.
```cpp+lineNumbers:true
TRIG = 17
ECHO = 5
GPIO.setup(TRIG,GPIO.OUT,initial=GPIO.LOW)
GPIO.setup(ECHO,GPIO.IN)
def Distance():
GPIO.output(TRIG,GPIO.HIGH)
time.sleep(0.000015)
GPIO.output(TRIG,GPIO.LOW)
while not GPIO.input(ECHO):
pass
t1 = time.time()
while GPIO.input(ECHO):
pass
t2 = time.time()
return (t2-t1)*34000/2
```