# Garra y el brazo articulado
En esta sección vamos a utilizar la [minigarra ](https://www.makeblock.es/productos/mini_garra_robotica/)junto con el [brazo articulado](https://www.makeblock.es/productos/mini_brazo_robotico/) para dar más potencial a nuestra construcción, si colocamos el brazo tal y como está en la foto, nos permite mover el eje en los ejes Y y X, para el eje Z se puede utilizar el movimiento de giro propio de mBot con las ruedas.
La minigarra tiene un servo, y el brazo articulado tiene 2 servos, en total 3 servos, **por lo tanto** tenemos que utilizar [2 adaptadores RJ45](https://www.makeblock.es/productos/adaptador_rj25/), dejando libre un slot, esto nos ocupa dos puertos, el otro puerto utilizaremos el[ sensor de línea ](http://aularagon.catedu.es/materialesaularagon2013/mbot/M2/sensor_de_lnea.html)pues nos permitirá mover el mBot por el camino que deseemos, y el otro puerto podemos utilizarlo para la [matriz ](http://aularagon.catedu.es/materialesaularagon2013/mbot/M2/matriz_led.html)o para el [sensor distancia](http://aularagon.catedu.es/materialesaularagon2013/mbot/M2/sensor_distancia.html)
Nosotros elegiremos la matriz, pues el sensor de distancia nos ha dado problemas (seguramente por los picos provocados por los servos).
**La garra no es muy fuerte**, igual que el brazo, por lo tanto NO FORZARLO CON PESOS ELEVADOS, se romperán los engranajes de plástico interiores de los servos (ver [Ojo con los servos](ojo_con_los_servos.html)), nosotros recomendamos un rollo de cartón por ejemplo higiénico pero de diámetro inferior, se puede hacer casero con un folio y celo.
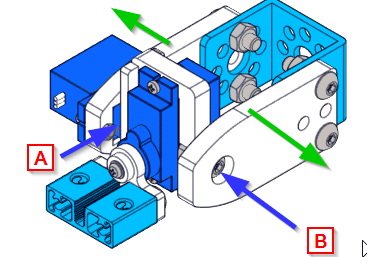
**OJO con el brazo articulado: Su construcción es compleja**, no es recomendable delegarlo a los alumnos: La U formada por la parte metáliza y las piezas de plástico transparente, si están algo abierto (flechas verdes) hace que el relé A que está enmedio de la U se caiga constantemente, hay que ajustar la U lo suficiente para que entre el relé primero entrando el relé A, luego colocar el tornillo B y finalmente el relé exterior, en ese orden, de lo contrario estaremos obligados a abrir la U para colocar el relé A y se caerá constantemente.
## Tira latas con teclado
### Propuesta
Realizar un programa que utilizando el teclado del ordenador, pueda manipular un objeto
La propuesta puede ser:
- Tecla C Cierra la garra
- Tecla A Abre la garra
- Tecla H coloca la garra en una posición Horizontal
- Tecla D balancea la garra hacia la derecha
- Tecla I balancea la garra hacia la izquierda
- Tecla flecha derecha gira el robot hacia la derecha
- Tecla flecha izquierda gira el robot hacia la izquierda
- Tecla fecha arriba mueve la garra arriba
- Tecla flecha abajo mueve la garra abajo
- Tecla 1 mueve el robot hacia delante
- Tecla 2 mueve el robot hacia detrás
- Tecla 0 para el robot
en fin.... es una propuesta, se puede hacer como se quiera
##### Solución
Por ejemplo para la siguiente configuración (puedes conectarlo como quieras, pero en esta solución conectamos los puertos y los slots a los servos siguientes:

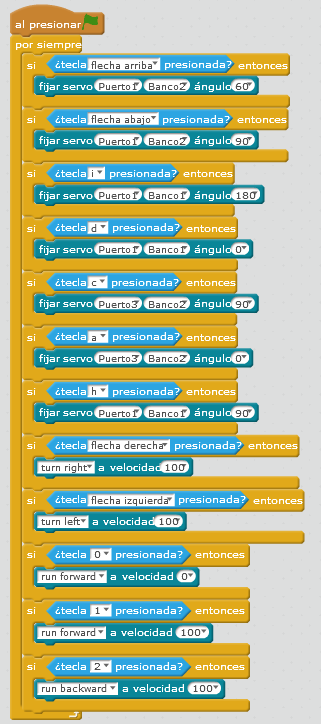
Puedes descargarte el programa [aquí](http://aularagon.catedu.es/materialesaularagon2013/mbot/M3plus/PINZAS-CIERRA-ABRE-CONTECLADO.sb2) (sb2 - 75.12 KB).
## Tira latas con mando
### Propuesta
Igual que el tira latas con teclado se puede hacer con mando, y tenemos un teledirigido capaz de coger las cosas... sólo hay que inventarse las teclas
##### Solución
Por ejemplo para la siguiente configuración (puedes conectarlo como quieras, pero en esta solución conectamos los puertos y los slots a los servos siguientes:

POR SUPUESTO ESTE PROGRAMA SÓLO SE PUEDE EJECUTAR SI LO GRABAMOS EN EL ARDUINO (o el mando IR no nos hará caso, pues por defecto tiene su configuración de fábrica)
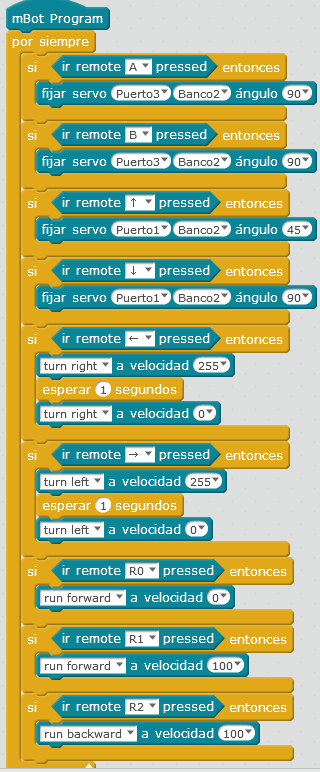
Puedes descargarte el programa [aquí](http://aularagon.catedu.es/materialesaularagon2013/mbot/M3plus/TIRALATASMANDOIR.sb2) (sb2 - 75.12 KB).
## Tira latas automático
### Propuesta
Esta vez, vamos a automatizar el proceso.
- Al apretar la tecla A del mando IR la garra baja, y se abre
28. Al apretar la tecla B - Cierra la garra - Se mueve hacia delante hasta que encuentra una línea negra - Abre la garra
##### Solución
Por ejemplo para la siguiente configuración (puedes conectarlo como quieras, pero en esta solución conectamos los puertos y los slots a los servos siguientes:

POR SUPUESTO ESTE PROGRAMA SÓLO SE PUEDE EJECUTAR SI LO GRABAMOS EN EL ARDUINO (o el mando IR no nos hará caso, pues por defecto tiene su configuración de fábrica)
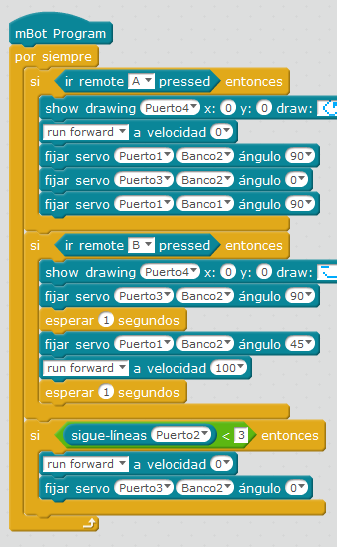
Puedes descargarte el programa [aquí](http://aularagon.catedu.es/materialesaularagon2013/mbot/M3plus/TIRALATAS.sb2) (sb2 - 75.19 KB).