Robótica educativa con Mbot
En este curso vamos a conocer y programar este robot: Para hacer este curso hay que saber previamente SCRATCH. M1 Preparados... Programación basada en SCRATCH (mBlock) Amplia gama de sensores y actua…
- Introducción
- 1. Preparados
- ¿Qué es mBot?
- mBot y mBlock
- Arduino: El corazón de mBot
- Componentes exteriores
- Programación mBlock
- Preparando mBlock
- IMPORTANTE: ACTUALIZAR FIRMWARE
- EN VIVO ¿Eso qué es?
- EN VIVO conexión 2.4 Bluetooth o cable
- CARGAR
- EN VIVO vs CARGAR
- A JUGARRRRR !!!!
- 2. Listos
- 3. Ya!!!
- 4 IA Introducción
- 5. IA máquinas ya educadas
- Cognitive Services Servicios cognitivos.
- Traductor
- Traductor con mBot2 (o mejor dicho con Cyberpi)
- Reconocimiento de voz- órdenes a mBot1
- Reconocimiento de voz- órdenes a mBot2
- Video Sensing: esto no es IA
- Google quickdraw
- 6. IA Software educable
- Maquina educable con Machine Learning for kids y Scratch
- Máquina Educable Teachable Machine
- Maquina educable con CODE ORG
- Playground, Teachable Machine Google y Microbit
- 7. IA Hardware educable
- SmartCamera - Qué es
- SmartCamera - conexión con mBot
- Smart camera - seguimiento color - sencillo
- Smart camera seguimiento color avanzado
- Smart camera Piximon
- Smart Camera Código de barras
- SmartCamera - sigue líneas
- Creditos
Introducción
Objetivos y contenidos
Para hacer este curso hay que saber previamente unos contenidos mínimos de SCRATCH.

No confundas
mBot objetivo de este curso, basado en Arduino unos 125€ con matriz LED https://www.robotix.es/es/mbot
mBot2 basado en Cyberpi unos 200€ https://www.robotix.es/es/mbot-2
Objetivos
- Conocer el robot mBot de Makeblock, sus características y posibilidades
- Empezar a programar el robot dentro del entorno de software típico de programación educativa de Scracth
- Conocer los diferentes elementos de interacción del robot, tanto internos como externos y crear proyectos utilizándolos
- Realizar procesos de gamificación educativa
Contenidos
- M1 Preparados...
- Programación basada en SCRATCH (mBlock)
- Amplia gama de sensores y actuadores
- Posibilidades de ampliación
- Comparativa con otros robots para educar el pensamiento computacional: calidad precio posibilidades
- Conexión con el ordenador, cuestiones técnicas y configuraciones antes de empezar.
- M2 Listos
- Módulos electrónicos integrados en la placa:
- Botón, LED RGB, Sensor luz, Sensor IR, Buzzer.
- Módulos electrónicos exteriores:
- Sigue-líneas, Sensor ultrasónico, Matriz Led
- Módulos electrónicos integrados en la placa:
- M3 YA !!!
- Evitar obstáculos
- Seguir una línea
- Más cosas !!

Pensamiento computacional
Puedes ver que este robot tiene un un margen de edad y como su programación es por bloques (Scratch) su curva de aprendizaje es rápida y apropiada para muchas situaciones.
Guía orientativa
Tenemos un grupo Telegram Robótica Educativa en Aragón, https://t.me/roboticaeducativaaragon

Lenguajes de programación
mBot, mBot2 se puede programar
- Por bloques principalmente con mBlok
- Por código principalmente Python
Guía de los lenguajes de programación para robots
Tenemos un grupo Telegram Robótica Educativa en Aragón, https://t.me/roboticaeducativaaragon
Robótica y accesibilidad
1.- Introducción
Durante mucho tiempo la robótica fue patrimonio de personas y/o instituciones con alta capacidad económica (podían adquirir las placas con microcontroladores comerciales) y capacidad intelectual (podían entender y programar el funcionamiento de las mismas) siempre dentro de los límites establecidos por las marcas comerciales y lo que pudieran “desvelar” de su funcionamiento, vigilando siempre que la competencia no “robara” sus secretos y “copiara” sus soluciones.
Todo esto saltó por los aires en torno a 2005 con la irrupción de un grupo de profesores y estudiantes jóvenes, que decidieron romper con esta dinámica, tratando de poner a disposición de su alumnado microcontroladores económicamente accesibles y que les permitieran conocer su funcionamiento, sus componentes, e incluso replicarlos y mejorarlos. Nacía Arduino y el concepto de Hardware Open Source. Detrás de este concepto se encuentra la accesibilidad universal. En un proyecto Open Source todo el mundo puede venir, ayudar y contribuir, minimizando barreras económicas e intelectuales.
Arduino traslada al hardware un concepto ya muy conocido en el ámbito del software, como es el software open source o software libre.
Software libre
Cuando los desarrolladores de software terminan su creación, tienen múltiples posibilidades de ponerlo a disposición de las personas, y lo hacen con condiciones específicas especificadas en una licencia. Esta licencia es un contrato entre el creador o propietario de un software y la persona que finalmente acabará utilizando este software. Como usuarios, es nuestro deber conocer las condiciones y permisos con las que el autor ha licenciado su producto, para conocer bajo qué condiciones podemos instalar y utilizar cada programa.
Existen muchas posibilidades de licencias: software privativo, comercial, freeware, shareware, etc.. Nos centraremos aquí en la de software libre.
GNU (https://www.gnu.org) es una organización sin ánimo de lucro que puso una primera definición disponible de lo que es software libre: Software libre significa que los usuarios del software tienen libertad (la cuestión no es el precio). Desarrollaron el sistema operativo GNU para que los usuarios pudiesen tener libertad en sus tareas informáticas. Para GNU, el software libre implica que los usuarios tienen las cuatro libertades esenciales:
1. ejecutar el programa.
2. estudiar y modificar el código fuente del programa.
3. redistribuir copias exactas.
4. distribuir versiones modificadas.
En otras palabras, el software libre es un tipo de software que se distribuye bajo una licencia que permite a los usuarios utilizarlo, modificarlo y distribuirlo libremente. Esto significa que los usuarios tienen libertad de ejecutar el software para cualquier propósito, de estudiar cómo funciona el software y de adaptarlo a sus necesidades, de distribuir copias del software a otros usuarios y de mejorar el software y liberar las mejoras al público.
El software libre se basa en el principio de la libertad de uso, y no en el principio de la propiedad. Esto significa que los usuarios tienen la libertad de utilizar el software de la manera que deseen, siempre y cuando no violen las condiciones de la licencia. El software libre es diferente del software propietario, que es el software que se distribuye con restricciones en su uso y modificación. El software propietario suele estar protegido por derechos de autor y solo se puede utilizar bajo los términos y condiciones especificados por el propietario del software.
Recomendamos la visualización de este video para entender mejor el concepto.
Más adelante, entorno a 2015, en Reino Unido, surgiría también la placa BBC Micro:bit, con la misma filosofía de popularizar y hacer accesible en este caso al alumnado de ese país la programación y la robótica. También hablaremos de ella.
2.- ARDUINO o LA ROBÓTICA ACCESIBLE
Arduino es una plataforma de hardware y software libre.
Hardware libre
Esto significa que tanto la placa Arduino como el entorno de desarrollo integrado (IDE) son de código abierto. Arduino permite a los usuarios utilizar, modificar y distribuir tanto el software como el hardware de manera libre y gratuita, siempre y cuando se respeten las condiciones de las licencias correspondientes.
El hardware libre es un tipo de hardware cuya documentación y diseño están disponibles de manera gratuita y libre para su modificación y distribución. Esto permite a los usuarios entender cómo funciona el hardware y adaptarlo a sus necesidades, así como también crear sus propias versiones modificadas del hardware.
Arduino surge como solución al elevado precio de los microcontroladores allá por el año 2005. En el ámbito de la educación, los microcontroladores solo se utilizaban en la etapa universitaria, y su coste era tan elevado que muchos proyectos de fin de carrera se quedaban únicamente en prototipos virtuales ya que las universidades no podían proveer a cada estudiante con un microprocesador, contando además que en el propio proceso de experimentación lo más habitual era que una mala conexión hiciera que se rompieran. Otro gran inconveniente era la dificultad de la programación. Cada fabricante entregaba su manual de programación, lo que hacía que de unos a otros no hubiera un lenguaje estándar, y la consecuente dificultad de interpretación. Además, su programación era a bajo nivel en lenguaje máquina. Generar una simple PWM requería una ardua y minuciosa secuenciación que podía llevar varias horas hasta conseguir el resultado deseado. Por este motivo, el enfoque de Arduino desde el principio fue ser Open Source tanto en hardware como en software. El desarrollo del hardware fue la parte más sencilla. Orientado a educación, sufre algunas modificaciones frente a los microprocesadores existentes para hacer más fácil su manejo y accesibilidad a cualquier sensor o actuador. El mayor esfuerzo se entregó en todas las líneas de código que hacían posible que ya no hubiera que programar a bajo nivel gracias al IDE de Arduino que incluía bibliotecas y librerías que estandarizaban los procesos y hacían tremendamente sencillo su manejo. Ahora el alumnado para mover un motor, ya no tenía que modificar las tramas de bits del procesador una a una, sino que bastaba con decir que quería moverlo en tal dirección, a tal velocidad, o a equis grados.
Acabábamos de pasar de unos costes muy elevados y una programación muy compleja a tener una placa accesible, open source y de bajo coste que además hacía muy accesible su programación y entendimiento, características fundamentales para su implantación en educación, hasta tal punto que su uso ya no era exclusivo de universidades, sino que se extiende a la educación secundaria.
Este hecho es fundamental para el desarrollo del Pensamiento Computacional en el aula observándose que su accesibilidad y beneficios son tales, que alcanzan a centros con alumnado de toda tipología como la aplicación del pensamiento computacional y robótica en aulas con alumnos de necesidades especiales. Una vez más, aparece el concepto de accesibilidad asociado a esta filosofía Open Source.
A este respecto, recomendamos la lectura de este interesante blog, que tiene por título: ROBOTIQUEAMOS...” Experiencia de aproximación a la robótica en Educación Especial (CPEE ÁNGEL RIVIÈRE). También recomendamos los trabajos robótica en Educación Especial (CPEE ÁNGEL RIVIÈRE): http://zaragozacpeeangelriviere.blogspot.com/search/label/ROB%C3%93TICA

Igualmente, la aparición de Arduino supone una gran facilidad para la aplicación de la robótica y la programación en la atención temprana, donde son numerosas sus aplicaciones desde ayudar a mitigar el déficit de atención en jóvenes autistas, hasta ayudar a socializar a los alumnos con dificultades para ello, o ayudar a alumnos de altas capacidades a desarrollar sus ideas.
Por otro lado su accesibilidad económica lo ha llevado a popularizarse en países de todo el mundo, especialmente en aquellos cuyos sistemas educativos no disponen en muchas ocasiones de recursos suficientes, lo que supone en la práctica una democratización del conocimiento y superación de brecha digital.
Filosofía del Arduino ver vídeo
Arduino y su IDE son la primera solución que aparece en educación con todas las ventajas que hemos enumerado, y esto hace que todos los nuevos prototipados y semejantes tengan algo en común, siempre son compatibles con Arduino
Para entender bien la filosofía de Arduino y el hardware libre, os recomendamos este documental de 30 minutos. Arduino the Documentary
Scratch: software libre para el desarrollo del pensamiento computacional
Scratch es un lenguaje de programación visual desarrollado por el grupo Lifelong Kindergarten del MIT Media Lab. Scratch es un software libre. Esto significa que está disponible gratuitamente para todos y que se distribuye bajo una licencia de software libre, la Licencia Pública General de Massachusetts (MIT License). Esta licencia permite a los usuarios utilizar, modificar y distribuir el software de manera libre, siempre y cuando se respeten ciertas condiciones. Entre otras cosas, la licencia de Scratch permite a los usuarios utilizar el software para cualquier propósito, incluyendo fines comerciales. También permite modificar el software y distribuir las modificaciones, siempre y cuando se incluya una copia de la licencia y se indique que el software ha sido modificado. En resumen, Scratch es un software libre que permite a los usuarios utilizar, modificar y distribuir el software de manera libre y gratuita, siempre y cuando se respeten las condiciones de la licencia. De hecho, gracias a que está licenciado de esta forma, han surgido decenas de variaciones de Scratch para todo tipos de propósitos, eso sí, siempre educativos y relacionados con las enseñanzas de programación y robótica
3. BBC micro:bit y la Teoría del Cambio
BBC micro:bit, a veces escrito como Microbit o Micro Bit, es un pequeño ordenador del tamaño de media tarjeta de crédito, creado en 2015 por la BBC con el fin de promover el desarrollo de la robótica y el pensamiento computacional entre la población escolar del Reino Unido. Actualmente su uso está extendido entre 25 millones de escolares de 7 a 16 años de más de 60 países.
 Tarjeta BBC micro:bit V1. Fuente: https://microbit.org. CC BY-SA 4.0.
Tarjeta BBC micro:bit V1. Fuente: https://microbit.org. CC BY-SA 4.0.
Aunque el proyecto fue iniciado por la BBC, su desarrollo fue llevado a cabo por 29 socios tecnológicos de primera línea. Por ejemplo, la implementación del Bluetooth integrado en la tarjeta corrió a cargo de la fundación propietaria de la marca, Bluetooth SIG, una asociación privada sin ánimo de lucro.
El hardware y el software resultantes son 100% abiertos, y están gestionados por una fundación sin ánimo de lucro que comenzó a funcionar en el año 2016, la Micro:bit Educational Foundation. La fundación basa sus actuaciones en su Teoría del Cambio,
Teoría del cambio y más sobre microbit
Teoría del cambio puede resumirse en tres principios:
- El convencimiento de que la capacidad de comprender, participar y trabajar en el mundo digital es de vital importancia para las oportunidades de vida de una persona joven.
- La necesidad de emocionar y atraer a las personas jóvenes por medio de BBC micro:bit, especialmente a las que podrían pensar que la tecnología no es para ellas.
- Diversificar a los estudiantes que eligen las materias STEM a medida que avanzan en la escuela y en sus carreras, para hacer crecer una fuente diversa de talento, impulsando la equidad social y contribuyendo a crear una tecnología mejor.
Para desarrollar sus principios, la fundación trabaja en tres líneas de acción:
- El desarrollo de hardware y software que contribuyan a despertar el entusiasmo en las personas jóvenes hacia la tecnología y hacia las oportunidades que presenta.
- La creación de recursos educativos gratuitos y fáciles de usar que permitan al profesorado enseñar de forma atractiva y creativa.
- La colaboración con entidades asociadas que compartan una misma visión para ofrecer programas educativos de alto impacto en todo el mundo.
Uno de los objetivos de la Micro:bit Educational Foundation es llegar a 100 millones de escolares en todo el mundo.
En correspondencia con las líneas de acción y con los principios expuestos, el sistema resultante es muy económico: tanto las placas como los accesorios producidos por terceras empresas tienen un precio muy contenido. Además, dado el carácter abierto del proyecto, están disponibles algunos clones totalmente compatibles, como Elecrow Mbits o bpi:bit. Estos clones son incluso más potentes y económicos que la placa original.
El universo micro:bit destaca por su alta integración de software y hardware: basta un clic de ratón para cargar las librerías necesarias para que funcione cualquier complemento robótico, como sensores, pantallas, tarjetas de Internet de las Cosas, robots, casas domóticas, etc.
La programación de la placa se realiza desde un ordenador a través de un navegador cualquiera, estando disponibles 12 lenguajes de programación. De nuevo, por ser un sistema abierto, existen múltiples soluciones de programación, aunque las más común es MakeCode.
 Captura de pantalla del editor MakeCode, https://makecode.microbit.org/#.
Captura de pantalla del editor MakeCode, https://makecode.microbit.org/#.
El sitio web MakeCode permite programar con bloques y también en Python y en Java, traduciendo de un lenguaje a otro instantáneamente. No se necesita ningún registro en la plataforma para poder programar.
Los programas también pueden guardarse descargados en el ordenador compilados en código de máquina. Al subir de nuevo el programa al editor, se realiza una decompilación automática al lenguaje de bloques, Python o Java. Los programas guardados en código de máquina se pueden cargar directamente en micro:bit, que en el escritorio de un ordenador se maneja como una simple unidad de memoria USB.
MakeCode contiene además múltiples recursos como tutoriales, vídeos, fichas de programación, cursos para el profesorado, ejemplos y propuestas de proyectos y experimentos, todo ello en varios idiomas y clasificado por edades desde los 7 años.
Otra solución muy usada para programar micro:bit es MicroPython, creada por Python Software Foundation, otra organización sin ánimo de lucro.
MicroCode permite que los más pequeños, a partir de los 6 años de edad, programen micro:bit mediante un sistema de fichas dispuestas en líneas de acción. Están disponibles un tutorial introductorio en 20 idiomas, una guía del usuario y muchos ejemplos. El proyecto es de código abierto.
Micro:bit también es programable en Scratch con sólo añadir una extensión al editor.
Todos los entornos de desarrollo descritos disponen de un simulador de micro:bit, por lo que ni siquiera resulta necesario disponer de una tarjeta física para aprender a programar.
Una vez realizada la programación, la placa y sus complementos pueden funcionar desconectados del ordenador por medio de un cargador de móvil, una batería externa o un simple par de pilas alcalinas.
Versiones y características de micro:bit
A pesar de su pequeño tamaño, micro:bit es un sistema potente. Existen dos versiones de la placa. La más moderna, llamada micro:bit V2, tiene las siguientes características:
- Procesador de 64 MHz.
- 512 KB de RAM Flash y 128 KB de RAM.
- Matriz de 5 x 5 LED rojos.
- Dos pulsadores mecánicos y un tercer pulsador de apagado y reset.
- Un pulsador táctil.
- Micrófono y altavoz.
- Acelerómetro y brújula.
- Sensores de luz y de temperatura.
- Comunicación con otras placas por Bluetooth de bajo consumo.
- Alimentación a 3 V o por USB.
- 25 pines de entradas y salidas para conectar motorcitos, sensores, placas de Intenet de las Cosas, robots y, en general, cualquier otro tipo de accesorio.
- 200 mA de intensidad de corriente disponibles en las salidas para alimentar accesorios.
4.- LA IMPORTANCIA DEL OPEN SOURCE / CÓDIGO ABIERTO EN EDUCACIÓN
La creación, distribución, modificación y redistribución del hardware y software libre así como su utilización, están asociados a una serie de valores que deberían ser explicados en la escuela a nuestros alumnos para dar una alternativa a la versión mercantilista de que cualquier creación es creada para obtener beneficios económicos.
En GNU, pusieron especial énfasis en la difusión del software libre en colegios y universidades, promoviendo una serie de valores fundacionales:
Valores GNU
Compartir
El código fuente y los métodos del hardware y software libre son parte del conocimiento humano. Al contrario, el hardware software privativo es conocimiento secreto y restringido. El código abierto no es simplemente un asunto técnico, es un asunto ético, social y político. Es una cuestión de derechos humanos que la personas usuarias deben tener. La libertad y la cooperación son valores esenciales del código abierto. El sistema GNU pone en práctica estos valores y el principio del compartir, pues compartir es bueno y útil para el progreso de la humanidad. Las escuelas deben enseñar el valor de compartir dando ejemplo. El hardware y software libre favorece la educación pues permite compartir conocimientos y herramientas.
Responsabilidad social
La informática, electrónica, robótica... han pasado a ser una parte esencial de la vida diaria. La tecnología digital está transformando la sociedad muy rápidamente y las escuelas ejercen una influencia decisiva en el futuro de la sociedad. Su misión es preparar al alumnado para que participen en una sociedad digital libre, mediante la enseñanza de habilidades que les permitan tomar el control de sus propias vidas con facilidad. El hardware y el software no debería estar bajo el poder de un desarrollador que toma decisiones unilaterales que nadie más puede cambiar.
Independencia
Las escuelas tienen la responsabilidad ética de enseñar la fortaleza, no la dependencia de un único producto o de una poderosa empresa en particular. Además, al elegir hardware y software libre, la misma escuela gana independencia de cualquier interés comercial y evita permanecer cautiva de un único proveedor. Las licencias de hardware y software libre no expiran
Aprendizaje
Con el open source los estudiantes tienen la libertad de examinar cómo funcionan los dispositivos y programas y aprender cómo adaptarlos si fuera necesario. Con el software libre se aprende también la ética del desarrollo de software y la práctica profesional.
Ahorro
Esta es una ventaja obvia que percibirán inmediatamente muchos administradores de instituciones educativas, pero se trata de un beneficio marginal. El punto principal de este aspecto es que, por estar autorizadas a distribuir copias de los programas a bajo costo o gratuitamente, las escuelas pueden realmente ayudar a las familias que se encuentran en dificultad económica, con lo cual promueven la equidad y la igualdad de oportunidades de aprendizaje entre los estudiantes, y contribuyen de forma decisiva a ser una escuela inclusiva.
Calidad
Estable, seguro y fácilmente instalable, el software libre ofrece una amplia gama de soluciones para la educación.
Para saber más
En los años 90, era realmente complicado utilizar un sistema operativo Linux y la mayoría de la cuota del mercado de los ordenadores personales estaba dominada por Windows. Encontrar drivers de Linux para el hardware que tenía tu equipo era casi una quimera dado que las principales compañías de hardware y de software no se molestaban en crear software para este sistema operativo, puesto que alimentaba la independencia de los usuarios con respecto a ellas mismas.
Afortunadamente, y gracias a la creciente presión de su comunidad de usuarios, estas situaciones pertenecen al pasado, y las compañías fabricantes de hardware han tenido que variar el rumbo. Hoy en día tenemos una gran cantidad de argumentos en los que nos podemos basar para dar el salto hacia cualquier sistema operativo basado en Linux. Tal y como podemos leer en educacionit.com, podemos encontrar las siguientes ventajas:
- Es seguro y respeta la privacidad de los usuarios: Aunque hay compañías linuxeras, como Oracle, Novell, Canonical, Red Hat o SUSE, el grueso de distribuciones y software Linux está mantenido por usuarios y colectivos sin ánimo de lucro. De esta forma, podemos confiar en que una comunidad que tiene detrás millones de usuarios, pueda validar el código fuente de cualquier de estas distribuciones, asegurándonos la calidad de las mismas, compartir posibles problemas de seguridad, y sobre todo, estar bien tranquilos con la privacidad y seguridad de nuestros datos e información personal, aspecto que debería ser crítico y determinante a la hora de trabajar con los datos de menores de edad en las escuelas y colegios.
- Es ético y socialmente responsable: La naturaleza de Linux y su filosofía de código abierto y libre hace posible que cualquier usuario con conocimientos pueda crear su propia distribución basada en otras o probar las decenas de versiones que nos podemos encontrar de una distribución Linux. Este es el caso de Ubuntu por ejemplo. Gracias a esta democratización de los sistemas operativos, incluso han podido aparecer en nuestras vidas nuevos dispositivos basados en software y hardware libre como Arduino y Raspberry Pi.
- Es personalizable: el código abierto permite su estudio, modificación y adaptación a las necesidades de los diferentes usuarios, teniendo así no un único producto sino una multiplicidad de distribuciones que satisfacen las necesidades de los diferentes colectivos a los que se dirijan. Especialmente útiles son las distribuciones educativas libres, que pueden ser adaptadas a las necesidades de las escuelas.
- Está basado en las necesidades de los usuarios y no en las de los creadores de hardware y software
- Es gratis. La mayoría de las distribuciones Linux son gratuitas y de libre descarga
- Es fácil de usar. Una de las barreras que durante años ha evitado a muchos usar Linux es su complejidad. Las distribuciones orientadas al consumo doméstico cumplen los estándares de simplicidad y necesidades que cualquier usuario sin conocimientos de tecnología pueda necesitar. El entorno gráfico es sencillo, intuitivo, e incluso se puede customizar para que se pueda parecer a los más conocidos como Windows y MacOS. Además, vienen con la mayoría de aplicaciones que cualquier usuario puede necesitar: ofimáticas, edición de audio y vídeo y navegación por Internet.
- Es suficiente. Tiene su propio market de aplicaciones. Como el resto de sistemas operativos ya sea para ordenadores o dispositivos móviles, también podemos encontrar un lugar único donde poder descargar cientos de aplicaciones para todos los gustos y necesidades.
Por estas razones, el software libre se ha expandido por toda la comunidad educativa en los últimos años de manera exponencial. Un buen ejemplo de lo que estamos hablando es Bookstack, este sistema de edición de contenidos para cursos que utiliza Aularagón así como el uso de Moodle como plataforma de enseñanza y aprendizaje. En cuanto a sistema operativo para ordenadores, en Aragón disponemos de nuestra propia distribución Linux: Vitalinux EDU. Tal y como podemos leer desde su página web: Vitalinux EDU (DGA) es la distribución Linux elegida por el Gobierno de Aragón para los centros educativos. Está basada en Vitalinux, que se define como un proyecto para llevar el Software Libre a personas y organizaciones facilitando al máximo su instalación, uso y mantenimiento. En concreto Vitalinux EDU (DGA) es una distribución Ubuntu (Lubuntu) personalizada para Educación, "tuneada" por los requisitos y necesidades de los propios usuarios de los centros y adaptada de forma personalizada a cada centro y a la que se ha añadido una aplicación cliente Migasfree. De ésta forma, obtenemos:
- Un Sistema Ligero. Permite "revivir" equipos obsoletos y "volar" en equipos modernos. Esto garantiza la sostenibilidad de un sistema que no consume recursos de hardware innecesariamente ni obliga a la sustitución del hardware cada poco tiempo en esa espiral de obsolescencia programada en la que se ha convertido el mercado tecnológico.
- Facilidad en la instalación y el uso del sistema mediante programas personalizados.
- Un Sistema que se adapta al centro y/o a cada aula o espacio, y no un centro que se adapta a un Sistema Operativo.
- Gestión de equipo y del software de manera remota y desatendida mediante un servidor Migasfree.
- Inventario de todo el hardware y software del equipo de una forma muy cómoda.
- Soporte y apoyo de una comunidad que crea, comparte e innova constantemente.
1. Preparados
¿Qué es mBot?
No confundas
mBot objetivo de este curso, basado en Arduino unos 125€ con matriz LED https://www.robotix.es/es/mbot
mBot2 basado en Cyberpi unos 200€ https://www.robotix.es/es/mbot-2
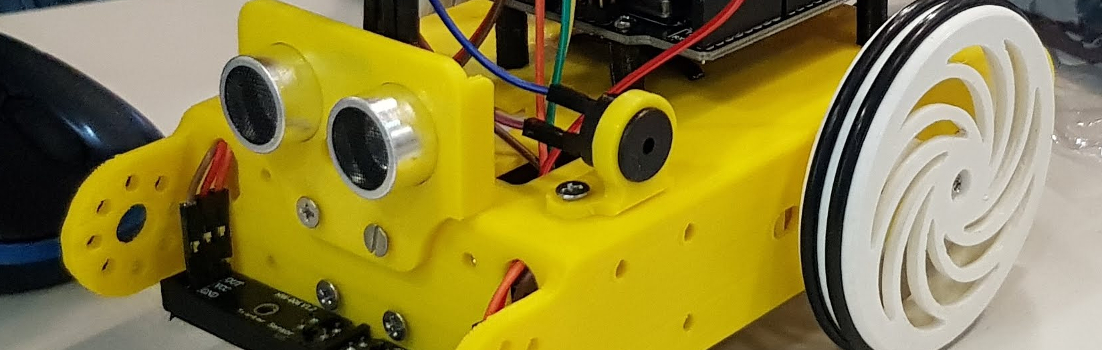
mBot es un robot educativo de la empresa Makeblock, que persigue los siguientes objetivos:
- El objetivo principal es desarrollar el pensamiento computacional en el alumnado motivado por la ejecución de órdenes en algo físico como es el robot.
- El robot está diseñado para su uso escolar: resistente y económico
- Basado en hardware libre y software libre
El objetivo 1 da como resultado que el kit de mBot sólo permite una configuración posible más los complementos que tiene el kit que proporciona el kit de CATEDU, no hay tiempos en construcción, sólo en programación, esto es otra filosofía diferente frente a otras alternativas como los robots de LEGO, que el tiempo en construcción y creatividad es importante. No queremos defender qué alternativa es buena y cual mala, sino que el docente tiene que decidir qué objetivos quiere perseguir, según lo que quiere tiene que decidir qué producto es el adecuado.
El objetivo 2 No podemos hablar de este objetivo pues actualmente este equipo no se fabrica Las características y precios de mBot 2.4G se puede ver en este enlace.
El objetivo 3 el hardware libre está materializado en que se basa en la placa ARDUINO, que lo han personalizado con más sensores y conexiones rápidas RJ11 (la clavija de teléfono fijo). El software libre en este robot está en el programa mBlock que está basado en el software de programación Scracth, diseñado para desarrollar el pensamiento computacional en los niños, ampliamente usado en todo el mundo, el cual le añaden unas librerías propias del robot, dando como resultado mBlock.
El software mBlock es el resultado de instalar el firmware de la placa Arduino, instalar las librerías del robot en el Scracth, actualizar, etc... recomendamos lo práctico: Descargar el mBlock directamente que lo tiene todo ya preparado.
Dentro de esta filosofía de libertad, los agujeros son compatibles con LEGO ampliando las posibilidades.
 Fuente: http://makeblock.es/
Fuente: http://makeblock.es/
¿Se puede uno fabricar un "mBot"?
SI, pues prácticamente es un Arduino con motores y sensores bastante estándares, y encima el programa mBlock es gratis, lo único es que no te saldrá tan perfecto. ¿Cómo se hace? para esto ya hay un curso en Aularagon MCLON https://libros.catedu.es/books/mclon-con-nanoarduino
y un grupo en Twitter: @mClonRobot
¿Se puede simular?
¿Qué no tienes robot? no pasa nada, hay buenos simuladores https://scratch.mit.edu/projects/788113358/editor/
mBot y mBlock
Requisitos de conceptos previos
Es necesario haber realizado una FORMACIÓN BÁSICA EN SCRATCH la formación exclusiva de Scratch en Aularagón es suficiente.
Requisitos de material
Necesitas el kit de robótica mBot de MakeBlock que presta CATEDU :
-
mBot con mochila de comunicación 2.4G. (actualmente solo ser vende la versión con Bluetooth)
-
Matriz de LEDS 8x16 donde aumentaremos la capacidad de interacción de nuestro simpático mBot.
Requisitos de software y Hardware
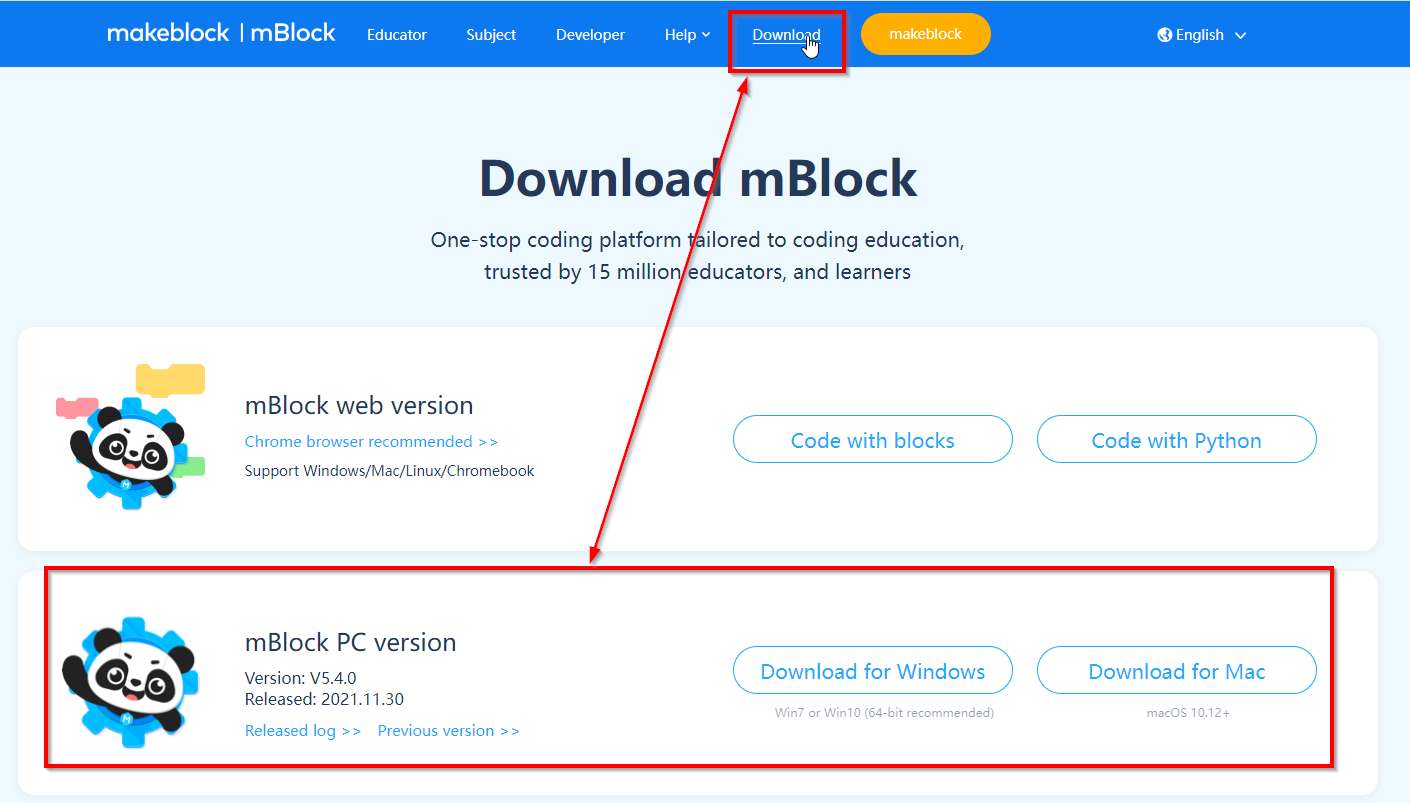
Instalar el mBlock en la página oficial de descarga mBlock http://www.mblock.cc/.
Disponible en diversos sistemas operativos y su instalación no presenta ningún problema.
- mBlock for PC: aconsejado para el aula, y recomendamos conexión 2.4G: Windows, Mac, Linus, ChromeOS,.
- mBlock for Mobile, que no aconsejamos para el aula porque necesita Bluetooth y se produce interferencias: Android, iPad .
Recomendamos usar la versión descargada y así no usar Internet, tenemos versión Windows y versión Mac, para Linux ver Robótica con Vitalinux
Hay que destacar que en Windows, la primera vez que se quiere comunicar con el robot salta el Firewall de Windows bloqueándolo, pero mostrando un diálogo si se permite o no esta comunicación externa, clickar en PERMITIR.
Se actualiza muy a menudo, mejorando cada vez más sus prestaciones, lo que implica que su descarga es cada vez más pesada, más de cien megas, pero después prescinde de Internet.
El programa es muy sencillo si estás acostumbrado al SCRATCH :

Fuente: http://makeblock.es/
Qué curioso !
mBlock está basado en Scratch y simplemente ha añadido extensiones para trabajar mBot, pero también ha añadido extensiones para trabajar Arduino, no es capricho, es porque mBot es un Arduino con dos motores y sensores.
En CATEDU hemos experimentado distintas formas de programar el Arduino de forma sencilla para alumnos de primaria y encontramos mBlock como el mejor programa para hacerlo. Nuestros cursos de -Arduino utilizamos mBlock.
Un vistazo a mBlock en la página de Robotopia :
Arduino: El corazón de mBot
El kit es fácil de montar (instrucciones), pero si nos fijamos el corazon es la placa de Arduino:

Fuente: http://makeblock.es/
Nos tenemos que fijar en estos componentes de la placa:

Fuente: http://makeblock.es/
- Los R25 donde montaremos los diferentes componentes externos, tienen colores para indicar qué componentes son compatibles.
- Transmisor de Infra Rojos para interactuar con el mando a distancia, un elemento de interacción, pero ojo: común a todos los robots que estén en el aula
- Botón que permitirá interactuar
- Puertos de motor, donde conectaremos los motores de las ruedas.
- Buzzer o pequeño altavoz, no puede hacer maravillas, sólo tonos simples
- RGB Led o luces de los tres colores básicos.
- Light Sensor o sensor de luz, que nos servirá como otra vía de interacción.
- También tiene una conexión USB para conectarse con el ordenador con un cable.
- Esta conexión USB a la vez puedes usarse como alimentación. Es una opción a considerar si se nos ha agotado las pilas y queremos seguir programando. O si quieres que se mueva el robot sin cable, y te has quedado sin baterías y no tienes pilas, pon un powerbank en ese puerto y a funcionar.
- La conexión USB funciona también como cargador si en vez de pilas usamos la batería de litio que hay debajo de la placa
- Para que entiendas qué diferencia hay entre una placa Arduino y esta placa de mBot, esta placa es un Arduino con ...
- Algunos elementos integrados: sensor luz, botón, transmisor IR, buzzer, leds...
- Tiene puertos RJ25 para conectar elementos exteriores fácilmente.
Componentes exteriores
Los componentes exteriores no importantes a la hora de programar del Kit son:
- Dos motores 200rpm 6V conectados a las ruedas.
- Mochila de comunicación 2.4G que permite conectarse con el ordenador de forma inalámbrica.
Componentes exteriores importantes a la hora de programar y que trataremos en este curso son:
- Sensor de Línea para utilizarlo por ejemplo como sigue líneas. EN ESTE CURSO LO CONSIDERAREMOS CONECTADO EN EL PUERTO 2.
- Sensor de distancia por ultrasonidos para utilizarlo por ejemplo como evita-obstáculos. EN ESTE CURSO LO CONSIDERAREMOS CONECTADO EN EL PUERTO 3.
- Matriz de leds 8x16 para expresar símbolos y caracteres. Este componente no está en el kit standard mBot, pero sí en el que presta CATEDU. EN ESTE CURSO LO CONSIDERAREMOS CONECTADO EN EL PUERTO 1.
Puedes elegir montar estos componentes en otros puertos, simplemente tienes que tenerlo en cuenta en la programación.
Si utilizas el kit de Catedu TE PEDIMOS NO MODIFICAR LOS PUERTOS PARA NO TENER PROBLEMAS CON LOS SIGUIENTES COMPAÑEROS QUE UTILICEN EL EQUIPO.



Fuente de las imágenes: http://makeblock.es/
Programación mBlock
DOS FORMAS DE PROGRAMAR EN MBLOCK
Como vemos, mBlock permite dos formas de programar :
OPCIÓN Programación en vivo
El programa reside en el ordenador, y en la placa hay instalado un Firmware para ir escuchando y ejecutando lo que manda el ordenador.
- VENTAJAS
- Te permite interactuar el robot y el ordenador, por ejemplo podemos hacer que cuando el detector de humedad detecte agua, que salga por pantalla un fondo acuático, o que pulsando una tecla del teclado se encienda un LED en la placa...
- DESVENTAJAS
- hay que cargar dentro del robot el Firmware exclusivo de mBlock para que Arduino haga caso a mBlock
- Hay que tener nuestro ordenador como intermediario, se come los recursos y puede que nuestro programa vaya lento
- Por supuesto necesita tener ordenador conectado al robot, o sea, trabaja como un esclavo del ordenador.
OPCIÓN Programación cargar a la placa
Todos los programas editores de Arduino (tanto los que programan con código como el Arduino IDE) como los editores de programas gráficos en bloque (mBlock, Snap4Arduino, Arduinoblocks, ...) permiten cargar el programa en la placa. Las ventajas y desventajas son las opuestas de trabajar en vivo.
EN VIVO ¿Qué es eso?
Existe una posibilidad de utilizar la placa "en vivo" frente a "cargar" el programa en la placa.
Es decir, interactuando con el ordenador. El programa está en el PC. En la placa hay un firmware que le dice que este a las órdenes del PC. De esta manera podemos por ejemplo:
- Enviar órdenes desde el ordenador a la placa.
Por ejemplo que al pulsar la tecla espacio que se encienda el led D13
- Enviar información desde la placa al ordenador
Por ejemplo que muestre por pantalla nos muestre la cantidad de luz, que registra el sensor LDR, etc...
Que nosotros sepamos, estos programas permiten la programación en vivo :
- mBlock placas: Arduino, Microbit, Raspberry Pi, ... robots de Makeblock: mBot, Cyberpi...
-EchidnaScratch CURSO DE ECHIDNA
-Microblocks
VENTAJAS LA PROGRAMACIÓN EN VIVO PERMITE MUCHO JUEGO Y POSIBILIDADES A LA HORA DE ELABORAR PROYECTOS
INCONVENIENTES: Necesitas el ordenador encendido y conectado al robot.
Preparando mBlock
Descargamos y ejecutamos mBlock desde la página de descargars de mBlock https://www.mblock.cc/en/download/
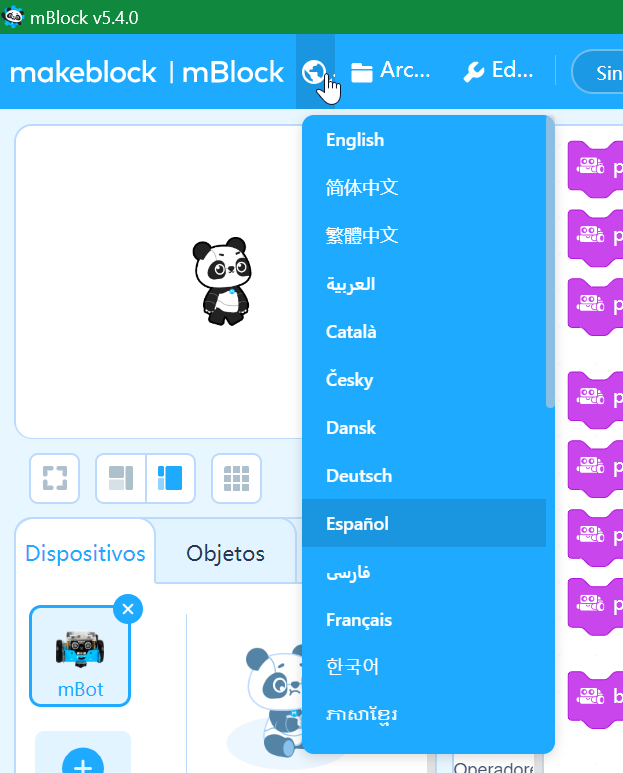
Podemos configurar el lenguaje
Vamos a Dispositivos, vemos pues como mBlock esta preparado para controlar distintos tipos de robot, destacamos Microbit, Arduino, .... bueno, al grano, vamos a añadir mBot
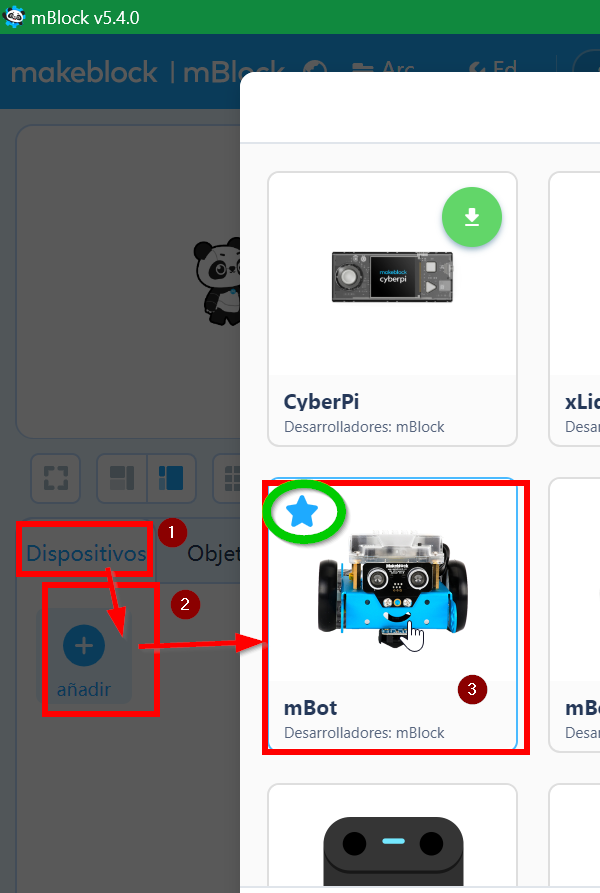
- Podemos quitar los dispositivos que no sean mBot pues no vamos a trabajar con ellos
- Si lo marcamos mBot pulsando en la estrella, ya saldrá predeterminado.
IMPORTANTE: ACTUALIZAR FIRMWARE
P.-Enciendes tu mBot, y de repente ¡¡se pone a hacer cosas !!! pero si no le programado aún nada!!! ¿Cómo es posible?
R.-Seguramente tu equipo mBot, el anterior alumno ha dejado un programa dentro del mBot
ACTUALIZAREMOS EL FIRMWARE SIEMPRE QUE MBOT NO RESPONDA A MBLOCK
¿Cómo se hace?
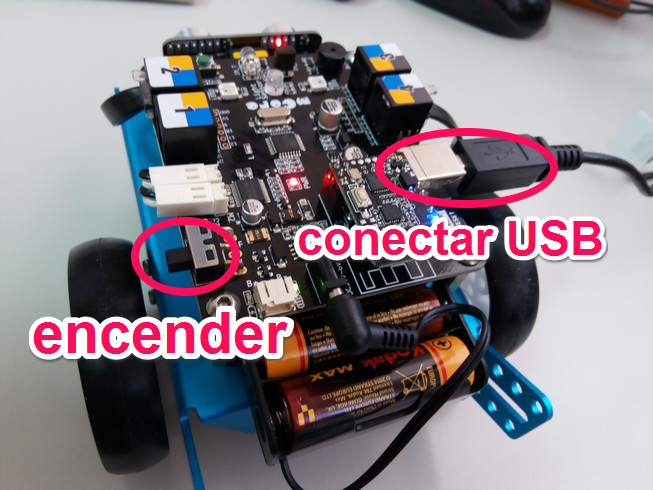
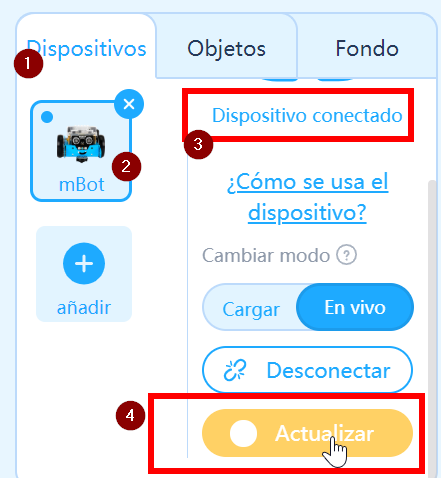
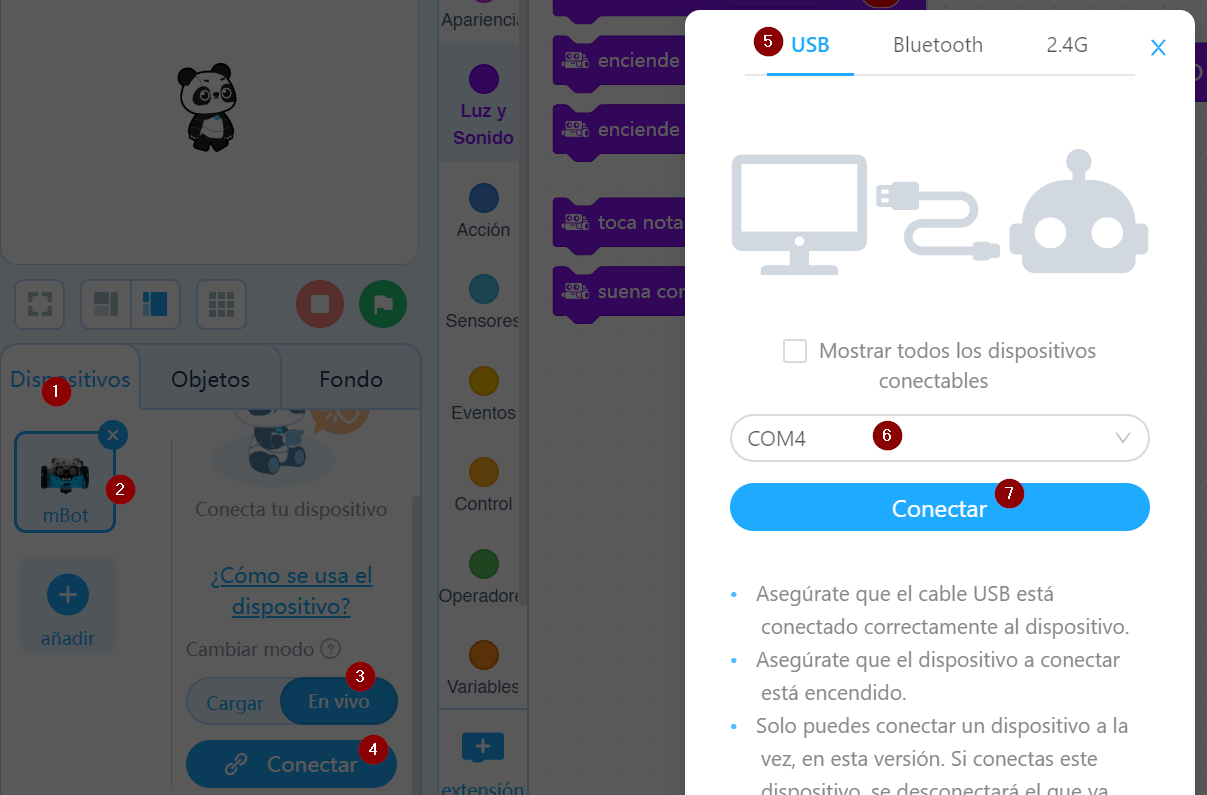
- Conectamos mBot con el cable USB al ordenador y encenderlo

Fuente el autor - Pulsamos en mBlock "CONECTAR"

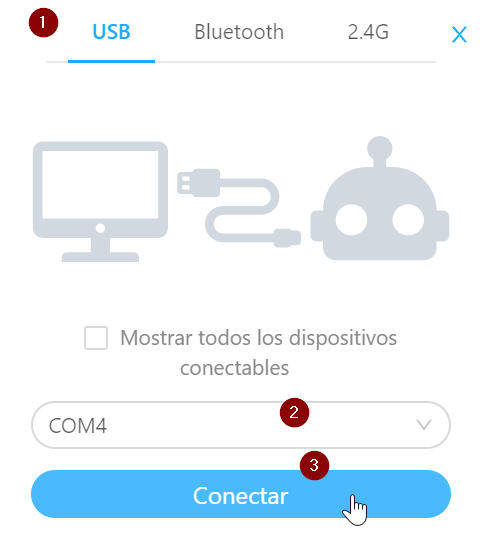
- En el diálogo seleccionamos USB y de todos los puertos USB seleccionamos el que esta conectado (suele ser el que propone) y CONECTAR

- Una vez que la conexión ha sido un éxito, le damos a ACTUALIZAR

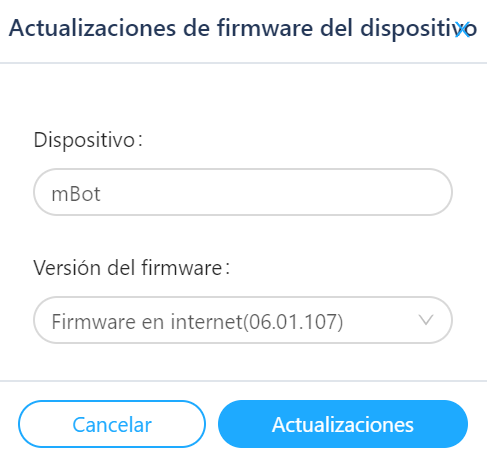
- Sale un diálogo para elegir qué firmware quieres, si el de fábrica o el que existe en Internet, no hay mucha diferencia de versiones

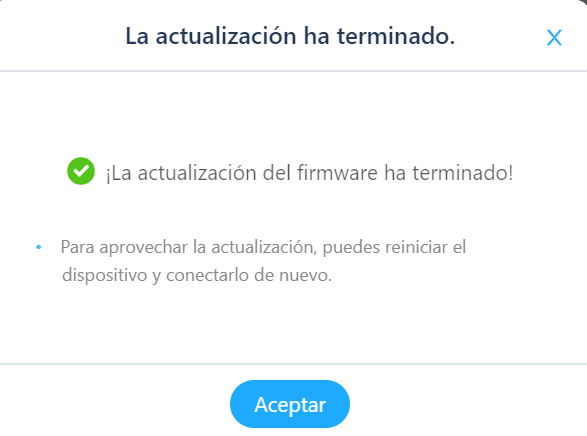
- Sale un mensaje de que se ha actualizado y advierte que SE VA DESCONECTAR EL DISPOSITIVO

- Volvemos a conectar el dispositivo, es decir, repetimos los pasos PASO 2 Y PASO 3
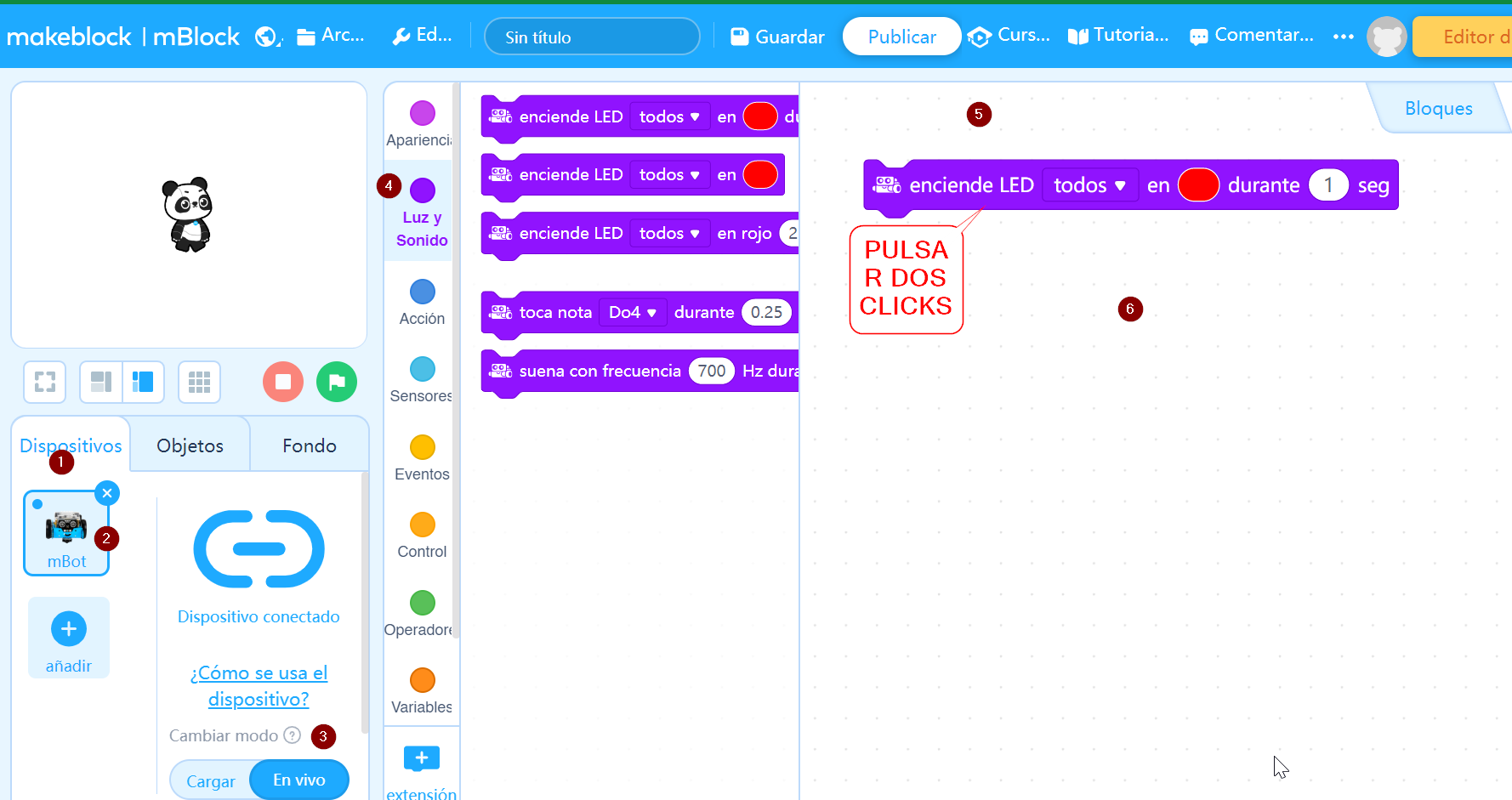
- PROBARLO vamos al dispositivo mBot, nos aseguramos que esta en modo EN VIVO, elegimos una instrucción sencilla, por ejemplo vamos a LUZ Y SONIDO elegimos ENCIENDE LED TODOS EN ROJO DURANTE 1 SEGUNDO damos DOS CLICKS en esa instrucción y mBot tiene que responder


EN VIVO ¿Eso qué es?
DOS FORMAS DE PROGRAMAR EN MBLOCK
Como vemos, mBlock permite dos formas de programar :
OPCIÓN Programación en vivo
El programa reside en el ordenador, y en la placa hay instalado un Firmware para ir escuchando y ejecutando lo que manda el ordenador.
- VENTAJAS
- Te permite interactuar el robot y el ordenador, por ejemplo podemos hacer que cuando el detector de humedad detecte agua, que salga por pantalla un fondo acuático, o que pulsando una tecla del teclado se encienda un LED en la placa...
- DESVENTAJAS
- hay que cargar dentro del robot el Firmware exclusivo de mBlock para que Arduino haga caso a mBlock
- Hay que tener nuestro ordenador como intermediario, se come los recursos y puede que nuestro programa vaya lento
- Por supuesto necesita tener ordenador conectado al robot, o sea, trabaja como un esclavo del ordenador.
OPCIÓN Programación cargar a la placa
Todos los programas editores de Arduino (tanto los que programan con código como el Arduino IDE) como los editores de programas gráficos en bloque (mBlock, Snap4Arduino, Arduinoblocks, ...) permiten cargar el programa en la placa. Las ventajas y desventajas son las opuestas de trabajar en vivo.
EN VIVO ¿Qué es eso?
Existe una posibilidad de utilizar la placa "en vivo" frente a "cargar" el programa en la placa.
Es decir, interactuando con el ordenador. El programa está en el PC. En la placa hay un firmware que le dice que este a las órdenes del PC. De esta manera podemos por ejemplo:
- Enviar órdenes desde el ordenador a la placa.
Por ejemplo que al pulsar la tecla espacio que se encienda el led D13
- Enviar información desde la placa al ordenador
Por ejemplo que muestre por pantalla nos muestre la cantidad de luz, que registra el sensor LDR, etc...
Que nosotros sepamos, estos programas permiten la programación en vivo :
- mBlock placas: Arduino, Microbit, Raspberry Pi, ... robots de Makeblock: mBot, Cyberpi...
-EchidnaScratch CURSO DE ECHIDNA
-Microblocks
VENTAJAS LA PROGRAMACIÓN EN VIVO PERMITE MUCHO JUEGO Y POSIBILIDADES A LA HORA DE ELABORAR PROYECTOS
INCONVENIENTES: Necesitas el ordenador encendido y conectado al robot.
¿Qué hace mBot EN VIVO dependiendo del ordenador?
En el modo EN VIVO, mBot obedece a un programa interno (Firmware) que es el que hemos puesto al ACTUALIZAR EL FIRMWARE
Este Firmware lo que le ordena a la placa Arduino es:
- Haz caso a las instrucciones del mando de IR ver figura de abajo
- Haz caso a la conexión con el ordenador y a las instrucciones que vengan por ahí
Esto tiene su importancia:
-
El punto 1 te dice que no puedes hacer un programa con el Mando IR pues prevalece el del Firmware, por lo tanto no se puede utilizar en tu programación el mando IR en el modo "dependiendo del ordenador" pero sí en el modo "independiente del ordenador".
-
El punto 2 te dice que tus programas se ejecutan en el ordenador y se lo comunica al robot luego:
-
Si desconectamos el ordenador o la conexión, dejan de funcionar, o mejor dicho se mBot se queda atascado en la última instrucción ejecutada.
- Tus programas van un poco lentos, pues dependen del ordenador. El mismo programa lo pasas al modo "independiente del ordenador" y va mucho más rápido.
Instrucciones del mando IR en el firmware que viene por defecto (modo dependiendo del ordenador):

Fuente de las imágenes: http://makeblock.es/
AL ACTUALIZAR EL FIRMWARE ESTAS DICIENDO AL MBOT QUE TRABAJE EN VIVO
EN VIVO conexión 2.4 Bluetooth o cable
Tenemos dos opciones de comunicarnos con mBot, inalámbrica 2.4G o con cable, aconsejamos la primera:
Conexión inalámbrica 2.4G
La conexión inalámbrica se realiza a través de la mochila 2.4G. Insertamos el pincho USB de la mochila (no necesita ningún driver, el ordenador lo interpreta como un ratón inalámbrico).

Pincho USB 2.4G fuente Makeblock.es
Cada pincho va asociado a un robot (o mejor dicho: a la mochila 2.4G están emparejados, si el led de la mochila parpadea es que ha perdido conexión, podemos emparejarlo haciendo una pulsación larga en el botón que hay en la mochila 2.4G.


Mochila 2.4G fuente makeblock.es
y conectamos el robot con el programa en Conectar- 2.4G Serial- Conectar
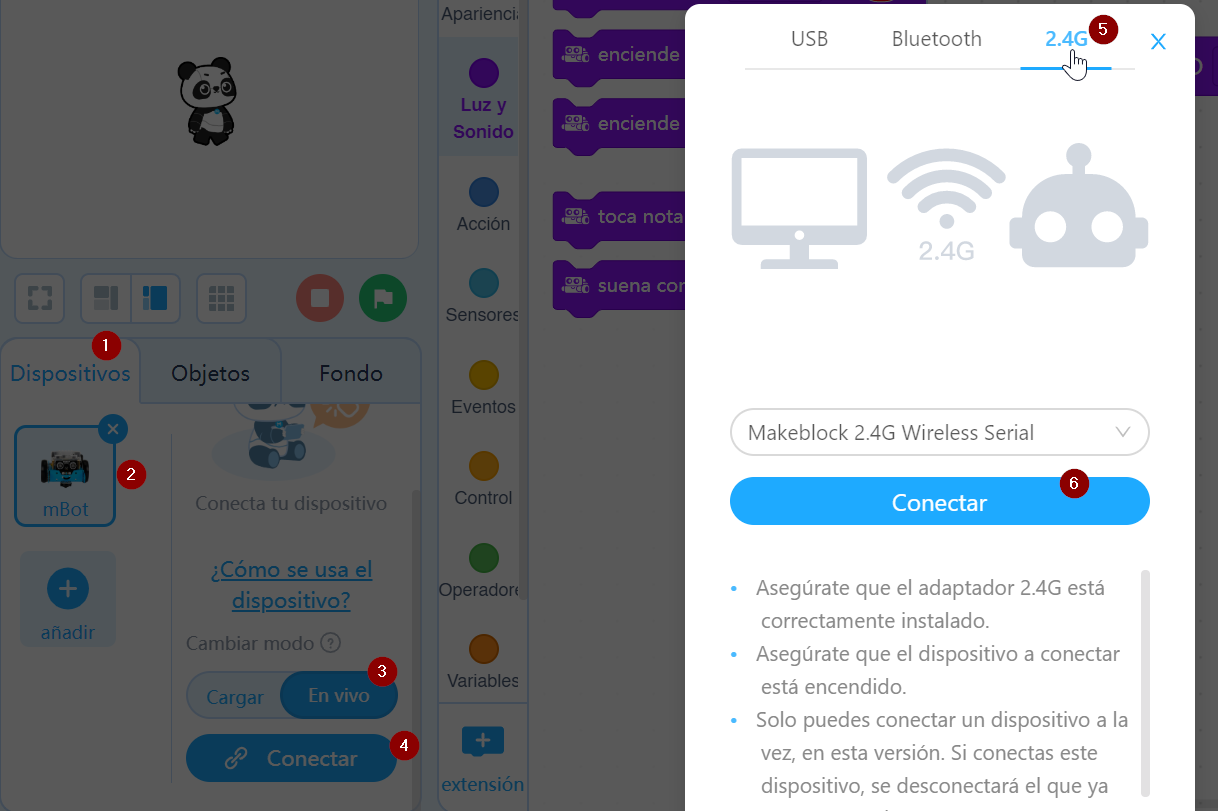
Si sale que esta conectado 2.4G ya podemos trabajar SOLO EN VIVO
Podemos probarlo haciendo dos clicks a la instrucción de encender led rojo durante un segundo
Conexión por cable
Existe la posibilidad de conexión por cable, útil por ejemplo si se ha perdido el pincho, seguir programando hasta la espera de la compra de otro, o por ejemplo si se agotan las pilas, por cable el robot puede seguir funcionando. Evidentemente con la pérdida de libertad de movilidad.
No hay que olvidar que si optamos por la conexión Serial por el puerto USB, TENEMOS QUE DESCONECTAR LA OTRA CONEXIÓN INALÁMBRICA:
CARGAR
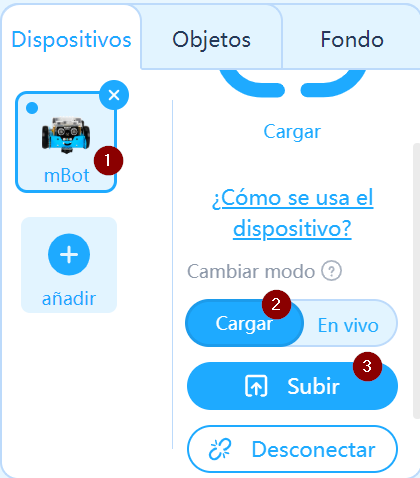
La opción de cargar tu programa en el mBot se hace simplemente
- Conectar el mBot por CABLE como lo hemos visto anterirormente
- Realizas tu programa
- Pulsa CARGAR
- Pulsa SUBIR y el programa va al mBot
ATENCION, UNA VEZ CARGADO EL PROGRAMA, TE HAS "CARGADO" EL FIRMWARE por lo tanto si quieres volver a trabajar con el mBot EN VIVO tienes que volver a ACTUALIZAR EL FIRMWARE tal y como lo hemos visto
EN VIVO vs CARGAR
VENTAJAS EN VIVO
- Se trabaja y se programa MUY FÁCILMENTE simplemente se ponen instrucciones en la pantalla de bloques y se van ejecutando en vivo
- una ventaja muy considerable PUEDES INTERACTUAR CON EL ORDENADOR Y CON LOS OBJETOS esto da mucha libertad
- puedes con el teclado, ratón dar órdenes al robot
- puedes visualizar en la pantalla del ordenador lo que lee mBot (por ejemplo la distancia del sensor US)
- puedes que los objetos (el panda o lo que sea...) interactúe
- con la opción CARGAR puedes interactuar con los objetos si utilizas la extensión BROADCAST ver https://libros.catedu.es/books/robotica-educativa-con-mbot/page/programacion-mblock
DESVENTAJAS EN VIVO
- Dependes del ordenador, es decir, el ordenador tiene que estar encendido
- lentitud, las órdenes van y vienen, no es lo mismo que si se ejecuta desde el mismo mBot, programas que implican rapidez, como el sigue líneas no funcionan bien en vivo, al menos que bajes la velocidad de los motores.
Cargar un programa tiene las ventajas y desventajas al revés de en vivo
OJO una vez que le das a CARGAR si quieres trabajar EN VIVO tienes que ACTUALIZAR EL HARDWARE
A JUGARRRRR !!!!
¿Lo probamos? venga!!! monta este sencillo programa. Las flechas te indican dónde está cada instrucción :
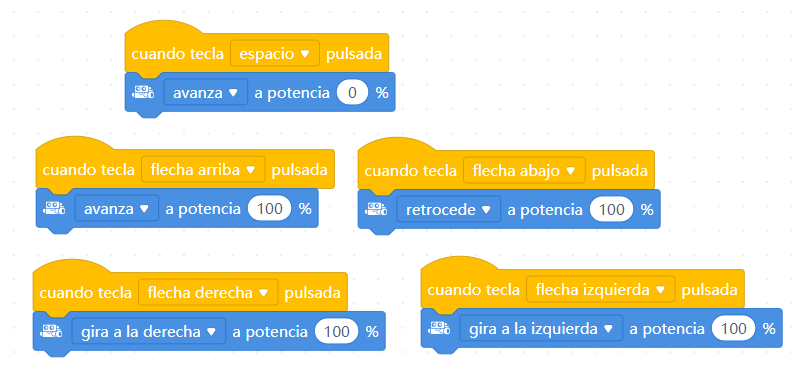
Lo tienes aquí https://planet.mblock.cc/project/2999030
y como decía Joaquín Prat en el precio justo A jugaaarr !!

Fuente http://lossesentas-mispersonajes.blogspot.com.es/2015/08/joaquin-prat.html
(si entiendes esto último, es que tienes la edad óptima para aprender a programar ;)
PONLE MÁS DIVERSIÓN
Pega en el mBot con cinta aislante una varilla sujeta globos, pon en un extremo un globo y en el otro extremo una aguja de coser también con cinta aislante

Se lo pasan genial !!!
2. Listos
Módulos electrónicos
En esta sección vamos a aprender los módulos que están integrados en la placa:
- Botón
- Led RGB
- Buzzer
- Sensor Infrarrojos
- Sensor de luz
 Fuente : Modificado de http://makeblock.es
Fuente : Modificado de http://makeblock.es
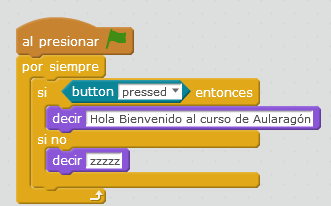
Botón
RETO
Realizar un programa que salga un mensaje al apretar el botón de mBot.
Solución
Con mBlock5 puedes utilizar o el código de la derecha o el de la izquierda
Utilizaremos la técnica VARIABLES GLOBALES, creamos una variable global MENSAJE, ver https://libros.catedu.es/books/robotica-educativa-con-mbot/page/programacion-mblock
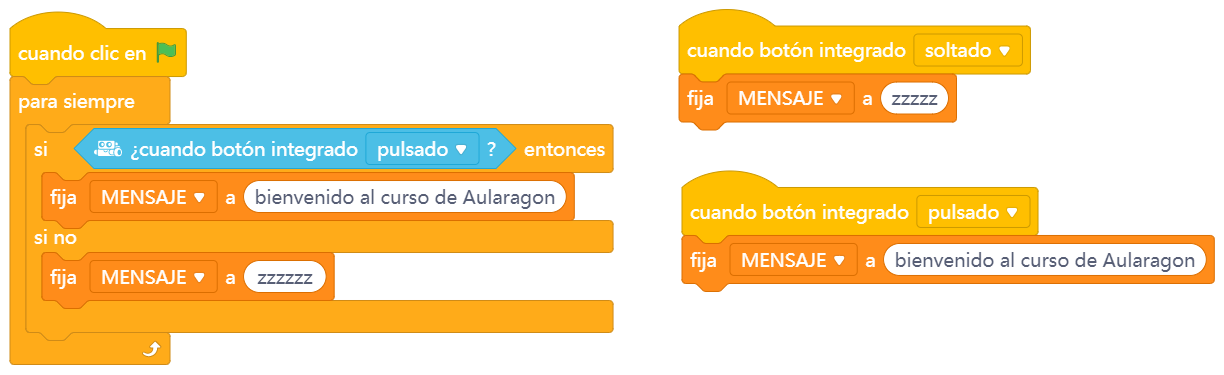
Y en el objeto oso panda
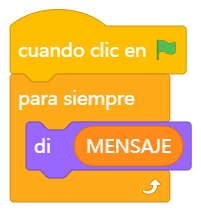
Con mBlock3 era
Pregunta tonta: ¿por dónde sale el mensaje?
El botón es un elemento de interacción a tener en cuenta, aunque como veremos más adelante es más útil usar el teclado del PC.
Siempre es típico que el primer programa en un curso de programación sea un "Hola Mundo" pero lo hemos personalizado
LED RGB
Los LED que hay montados en la placa permiten poner los 3 colores básicos a distintas tonalidades, desde 0 hasta 255, que podemos mezclar
RETO
Realizar un programa que al apretar en el teclado.. * 'a' se encienda el rojo * 's' se encienda el verde * 'd' se encienda el azul
Solución
En mBlock5 lo tienes aquí https://planet.mblock.cc/project/3261360
 En mBlock3
En mBlock3
Ahora usa el teclado de tu ordenador, pulsa las teclas a s y d
¿No funciona?
Puede ser que mBot se quede enganchado con algún código anterior, y no lo tengas en modo VIVO
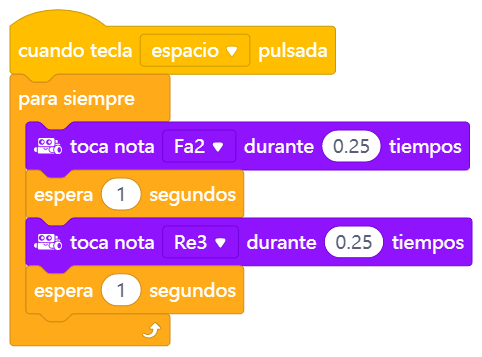
Buzzer
Este simpático zumbador nos da algo de juego, podemos cambiar la nota como la duración, vamos a probarlo:
Reto
Realizar una sirena, es decir, que suene un tono un segundo por ejemplo, y otro tono diferente durante otro segundo, y así sin parar. Para complicarlo más, sólo hará la sirena si pulsamos la tecla espacio. Para pararlo hay que pulsar el círculo rojo que hay al lado de la bandera.
Solución
En mBlock5 lo tienes aqui https://planet.mblock.cc/project/3261365
En mBlock3
Aquí podemos conseguir un tono creciente
Y para los más frikis ;) ...
De http://juegosrobotica.es/musica-con-mbot/
Si alguien lo hace, por favor que lo cuelgue en el muro !
Mando a distancia y sensor IR
El sensor de IR puede recibir del mando números, letras A-D, flechas y el botón configuración. Ojo: El mando no es exclusivo de un robot, es decir, los demás robots del aula reciben las misma información, lo importante es apuntar el mando a los sensores del robot y no a otro:

Fuente: Tutorial de http://makeblock.es
Para comprobar si tu mando funciona, es muy fácil (válido para todos los mandos, incluso el de TV) enfoca con tu móvil y aprieta a ver si se enciende la luz. La cámara de los móviles es sensible al IR
Reto
Vamos que puedes hacerlo bailar !! con el mando a distancia, tienes que controlar sus movimientos, flecha arriba adelante, flecha atrás retrocede.... botón central (el de la rueda dentada) que pare.
Solución
Con mBlock 5 se puede en vivo o cargar. Lo tienes aquí https://planet.mblock.cc/project/3263253
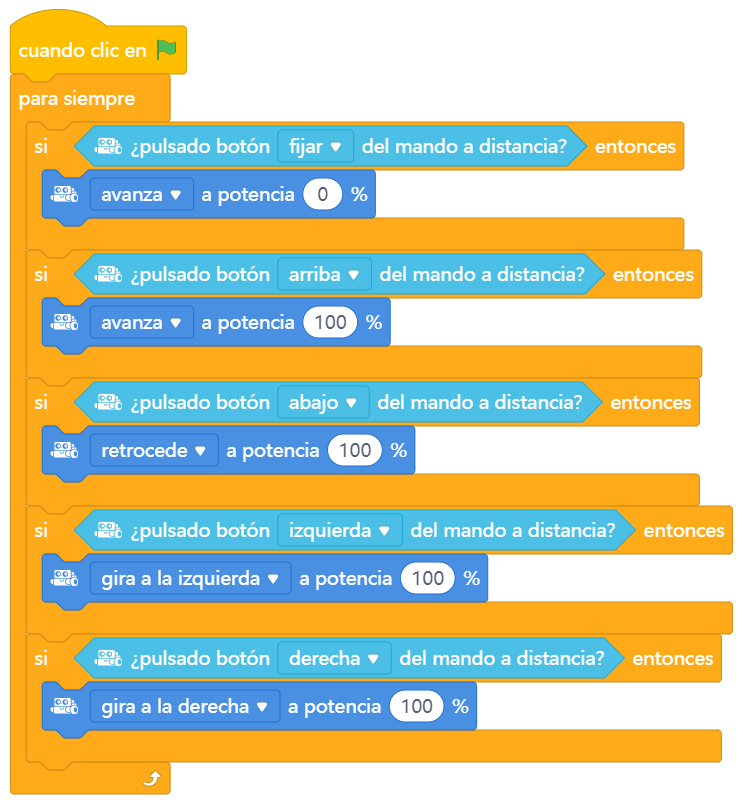
Con mBlock 3 sólo se puede cargar, no en vivo

Sensor Luz
El sensor Luz está situado al lado de los de IR, detecta la luz ambiente, pero también hemos experimentado que detecta la infrarroja, por lo que es sensible a la calefacción, y falsea su medida.

Fuente: Tutorial de http://makeblock.es
Reto que el panda diga la luz que hay
Vamos a creare un programa donde el objeto Panda diga la cantidad de luz que lee. La intención es ver cual es el umbral para realizar el siguiente reto
En mBlock5.0
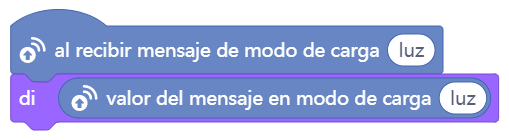
Puedes utilizar la técnica de VARIABLES GLOBALES, que es muy fácil y lo hemos visto y explicado aquí https://libros.catedu.es/books/robotica-educativa-con-mbot/page/programacion-mblock y que sería el programa como este https://libros.catedu.es/books/arduino-con-echidna-y-mblock-scratch/page/el-ldr-en-a5 pero vamos a utilizar en este caso la técnica más sofisticada BROADCAST
El programa lo tienes aquí https://planet.mblock.cc/project/3263369
El programa en el dispositivo MBOT (hay que ir al + de abajo, e instalar la extensión BROADCAST)
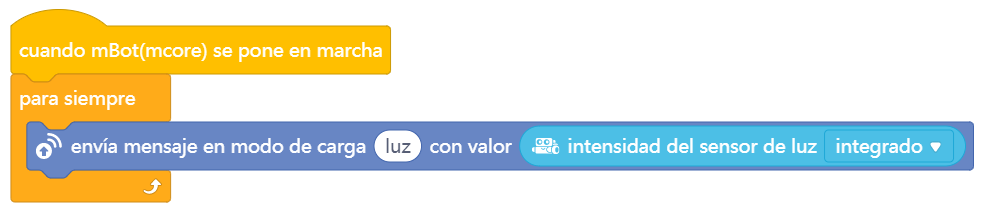
El programa en el dispositivo OSO PANDA (hay que ir al + de abajo, e instalar la extensión BROADCAST)
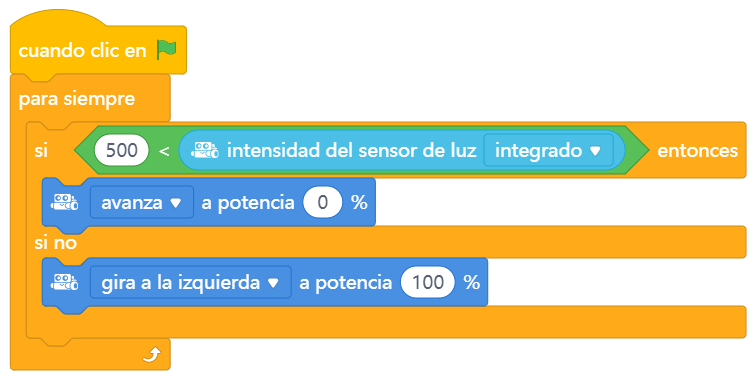
RETO MARCHA NOCTURNA
Realizar un programa que si se apaga la luz, el robot ¡¡se pone a dar vueltas!! sino, se queda quieto:
Solución
Utilizaremos el programa anterior para saber el UMBRAL es decir, qué valor determinamos que hay luz y no hay luz, en nuestro caso por las características del aula, lo fijamos en 500, en tu caso puede ser distinto.
En mBlock5.0 lo tienes aquí https://planet.mblock.cc/project/3263444
En mBlock 3.0 
Es muy espectacular hacerlo con los alumnos, se deja el aula a oscuras, se encienden todas las luces y todo baila !

No te quedes sólo con darle vueltas
El pobre tiene ganas de salir de marcha por la noche:
RETO Robot polilla
Ya sabemos que las polillas van a la luz: Realizar un programa que si hay luz entonces que vaya recto, si no hay luz que de vueltas
Solución
En mBlock 5.0 lo tienes aquí https://planet.mblock.cc/project/3263452
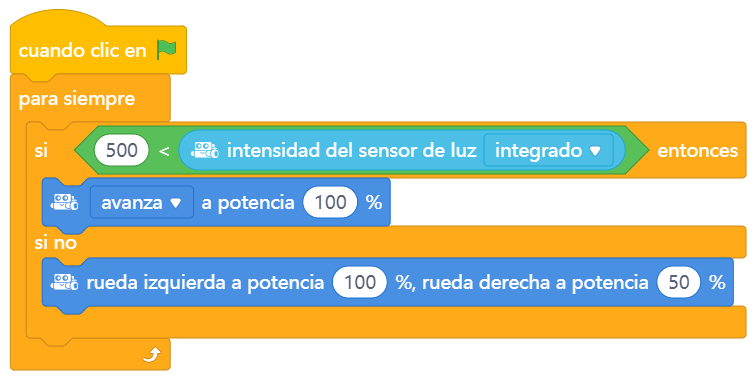
Se ha optado por dar un poco de potencia a la otra rueda cuando no hay luz, para que de la vuelta un poco más abierta. Puedes poner simplemente la instrucción girar (a la derecha o a la izquierda) pero si hace la vuelta abierta, va mejor.
En mBlock3, y de paso que nos diga el oso la luz
Componentes exteriores
Componentes exteriores importantes a la hora de programar y que trataremos en este curso son:
- Sensor de Línea para utilizarlo por ejemplo como sigue líneas. EN ESTE CURSO LO CONSIDERAREMOS CONECTADO EN EL PUERTO 2.
- Sensor de distancia por ultrasonidos para utilizarlo por ejemplo como evita-obstáculos. EN ESTE CURSO LO CONSIDERAREMOS CONECTADO EN EL PUERTO 3.
- Matriz de leds 8x16 para expresar símbolos y caracteres. Este componente no está en el kit standard mBot, pero sí en el que presta CATEDU. EN ESTE CURSO LO CONSIDERAREMOS CONECTADO EN EL PUERTO 1.
Por favor no cambies los puertos del equipo de préstamo de Catedu

Fuente de las imágenes: http://makeblock.es/
Sensor de línea
El sensor de líneas está situado en la parte inferior de mBot:

Fuente: Tutorial de http://makeblock.es
Y tiene los siguientes valores:
- 0 si detecta todo negro (en binario 00)
- 1 si detecta blanco derecha pero negro a la izquierda (01)
- 2 al revés (10)
- 3 si detecta los dos blancos (11)

Fuente: Tutorial de http://makeblock.es
Reto, la oveja en su redil
Ponemos a mBot en un recuadro blanco con el borde negro, queremos que hagas un programa que no salga nuestro robot del "redil".
Consejo: Poner velocidad baja pues si va rápido se salta la línea.
Solución
En mBlock 5.0 lo tienes aquí https://planet.mblock.cc/project/3263664
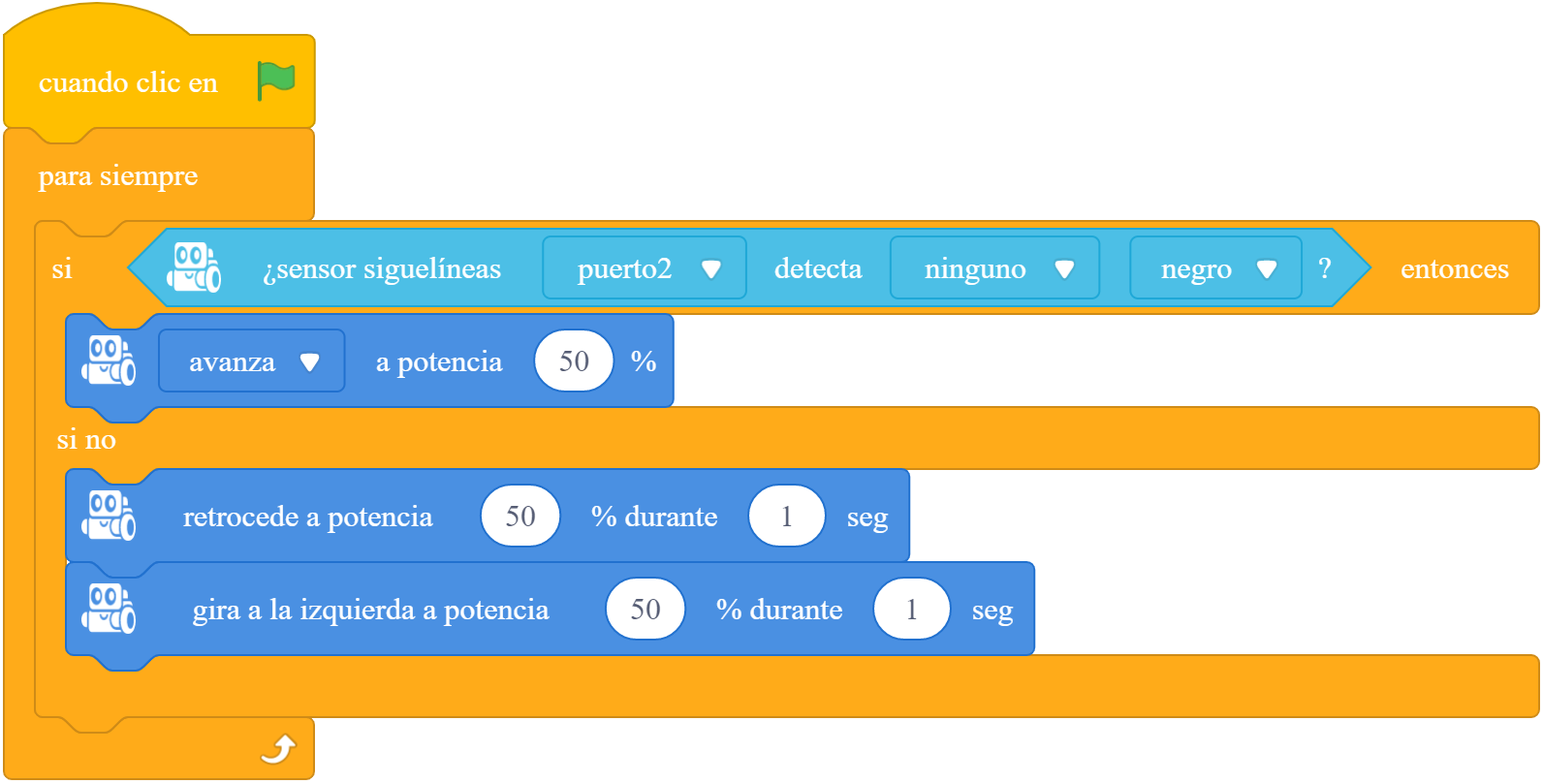
Fíjate que se ha puesto NINGUNO NEGRO de esta manera, en el momento que uno de los sensores detecte negro, dará la media vuelta
En mBlock3.0

Si no funciona bien, se salta la línea.. no trabajes en vivo, carga el programa
Sensor distancia
El sensor de distancia por ultrasonidos nos devuelve por eco la distancia en cm del objeto que se encuentra enfrente, hasta un máximo de 400 cm

Fuente: Tutorial de http://makeblock.es
Reto huir
Queremos que hagas un programa que si pongo la mano delante, que se vaya atrás. Por ejemplo a menos de 10cm.
Solución
En mblock5.0 lo tienes aquí https://planet.mblock.cc/project/3264009
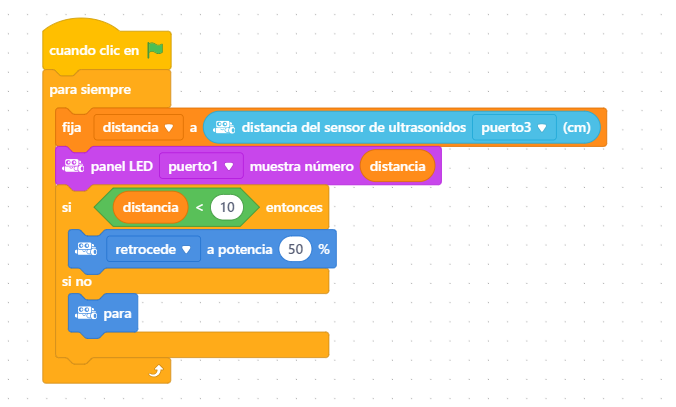
Se ha utilizado una instrucción de MATRIZ LED que veremos a continuación para visualizar la distancia
En mBlock 3 Para calibrar, se ha utilizando el Panda que diga la distancia que lee (Instruccion Decir...). Está realizado el programa con mBlock3.

Fuente: Captura de pantalla mBlock. Programa: el autor.
Intenta cogerlo !!! (por delante claro)
Matriz Led
Con este simpática matriz, tenemos mucho juego, podemos hacer un dibujo, texto, valores numéricos ...
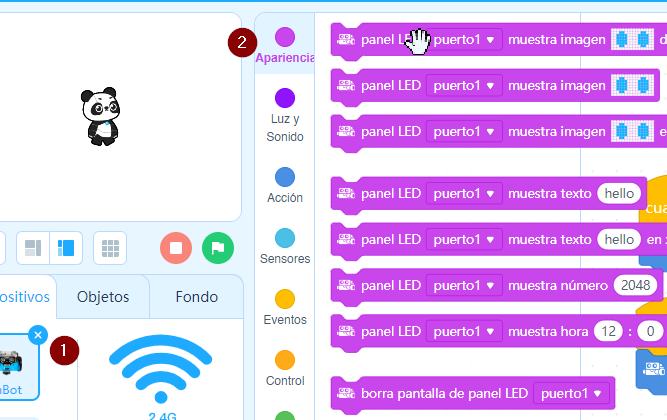
y si hacemos dos clicks nos permite poner el gráfico que queramos, incluso guardarlo en favoritos!

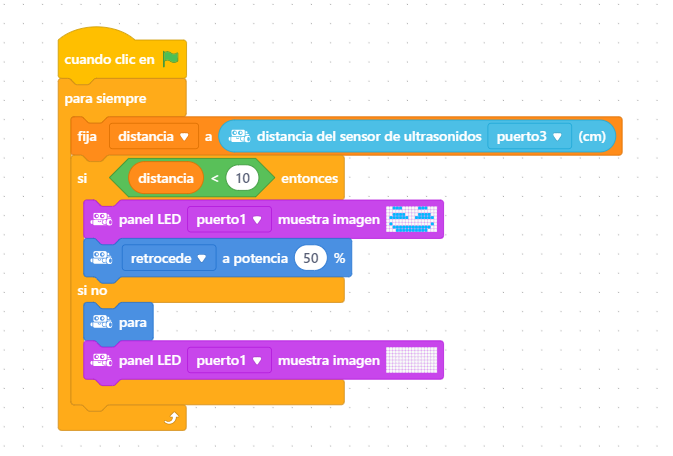
Reto
Realizar un programa como en anterior pero en vez de huir, que sonría. Es decir, si pongo la mano delante sale una cara sonriente.
Solución
En mBlock 5.0 lo tienes aquí https://planet.mblock.cc/project/3264027
En mBlock3

Qué simpático ¿no?
También puede ser que se ponga triste si no se pone la mano
¿No funciona?
Puede ser que mBot se quede enganchado con algún código anterior, la solución como siempre ACTUALIZAR FIRMWARE
Podemos enviar un texto, con la instrucción show face:

Esto envía en las coordenadas 0,0 la palabra CATEDU pero.... ¡¡SALE CAT!!
Claro ! no cabe!! ¿cómo lo hacemos? esto requiere más programación, hay que crear una variable X e ir ¿incrementando o decrementando la coordenada x? vamos a probar decrementando

Y ahora incrementando ¿cómo salen las letras CATEDU?

A pesar de que las capturas están con mBlock 3.0 con mBlock 5.0 es igual
Enviar la hora .... este curso es largo ¿qué hora es? que nos lo diga:

El robot no tiene reloj .. entonces ¿Quién le dice la hora?
mBot lo gobierna un Arduino, por lo tanto un micro atmel128 con reloj interno, que puede utilizarse, pero no es este caso, pues es una instrucción azul que es propio de Scratch, por lo tanto del ordenador, que no puede usarse con Upload Arduino o Cargar sino EN VIVO
3. Ya!!!
Evitar obstáculos
Programa al mBot para que sea capaz de evitar cualquier obstáculo, paredes... usando el sensor de ultrasonidos, aunque el del vídeo le ha puesto sirena!!

Solución
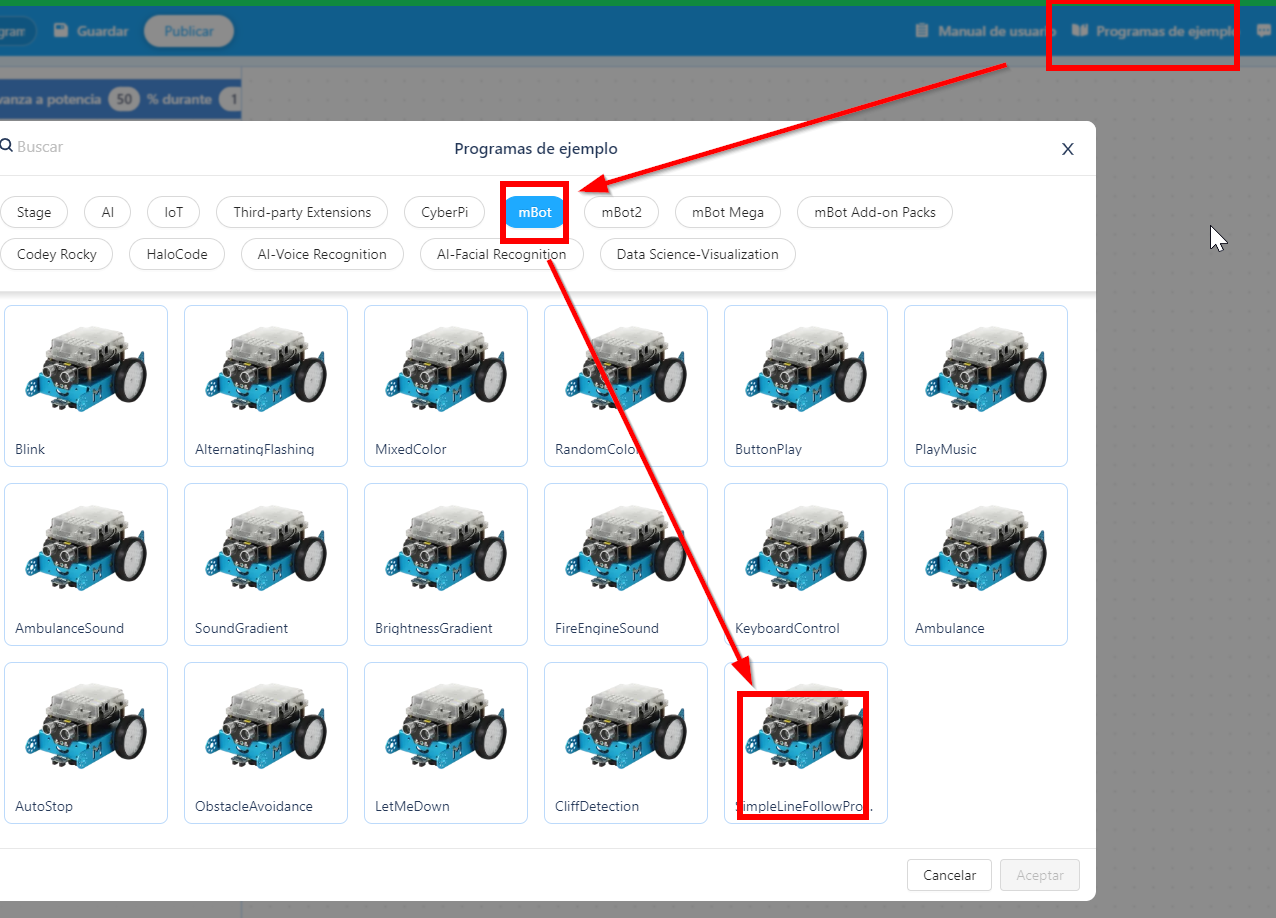
Con mBlock 5.0 te vamos a proponer que lo obtengas de los programas ejemplo
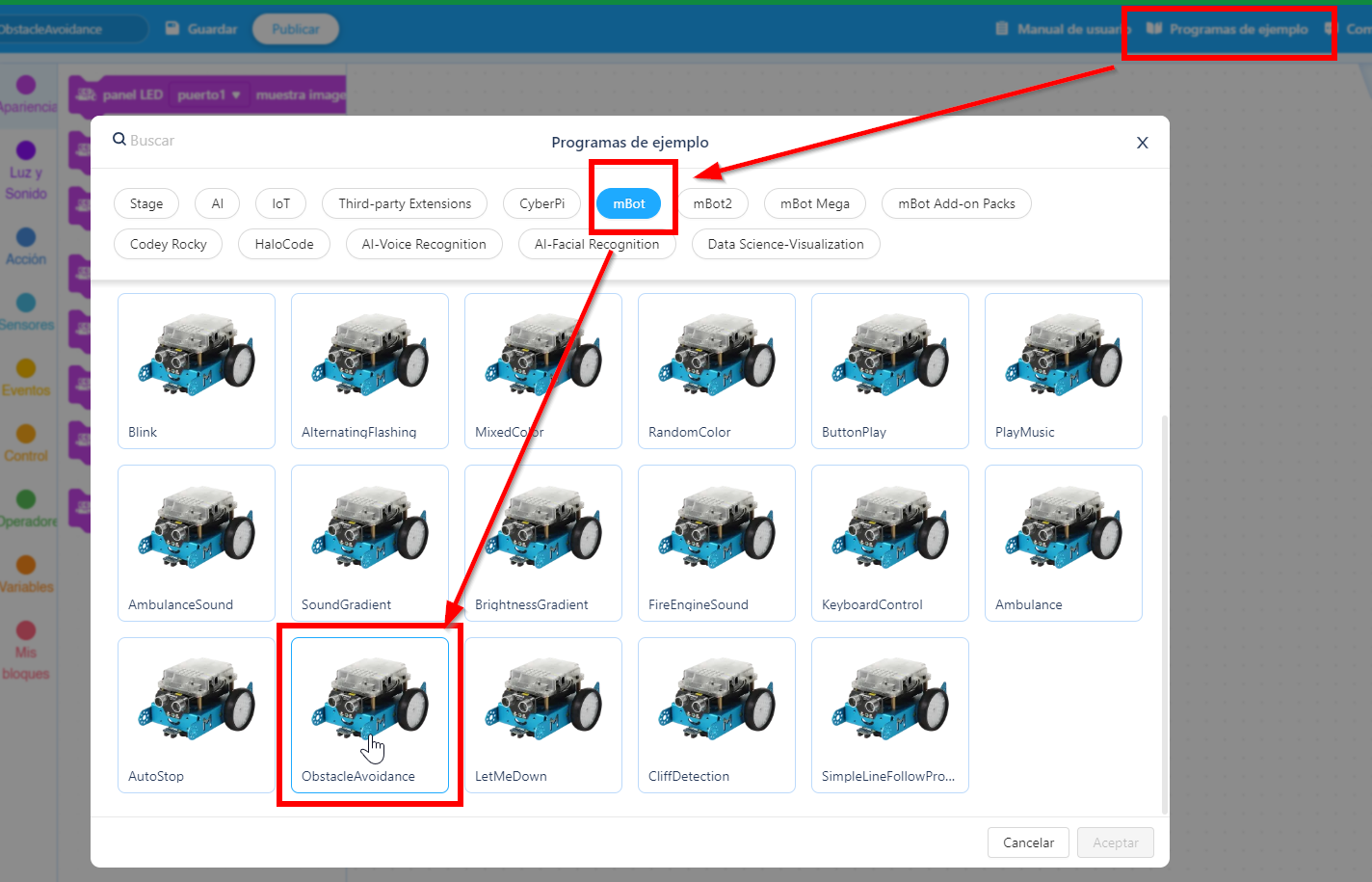
Y te proponemos que lo modifiques
- Que vaya rápido
- Que funcione en vivo
RETO que no se atasque
Se ataca a veces, ¿y si le haces estas mejoras? (la captura está en mBlock3 pero para mBloc5 es igual)

RETO que salga de un laberinto
Una opción es salir de un laberinto, página descarga piezas 3D
Siguelíneas
El sensor sigue-líneas no le hemos sacado potencial, pide a gritos que siga un circuito, en el kit impreso hay una propuesta de circuito, también te lo puedes descargarlo aquí pero otra opción es con cinta negra adhesiva hacer en el suelo (tonos claros) el circuito que queramos, pero recomendamos poner doble grosor, sobre todo si mBot va rápido, pues se lo salta, y no hacer curvas muy cerradas. Si ves que hay problemas, no trabajes en vivo, carga el programa.
¿Cómo harías el programa?
Ten en cuenta que el sigue líneas, si devuelve 3 es que va por buen camino, si devuelve 1 habría que girar hacia la ... si devuelve 2 habría que girar hacia la ... y si devuelve 0 es que se ha ido, lo mejor es que des marcha atrás.
Solución fácil
Esta captura está con mBlock 3 con mBloc5 es parecido

Pero tiene un problema: a veces se salta la línea, esto es debido a que se necesita un giro más suave que una rueda gire y la otra quita, no que una gire en un sentido y la otra en sentido inverso.
SOLUCIÓN BUENA
Para ello hay que instalar la extensión PLATAFORMA DEL FABRICANTE
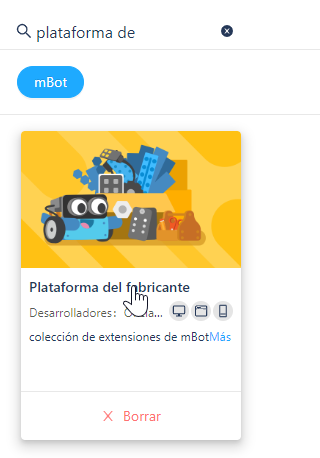
y puedes mejorar el programa de esta manera con giros más suaves pues ya tienes el control de las ruedas

El programa lo tienes predeterminado aquí
Puedes hacer puentes y todo
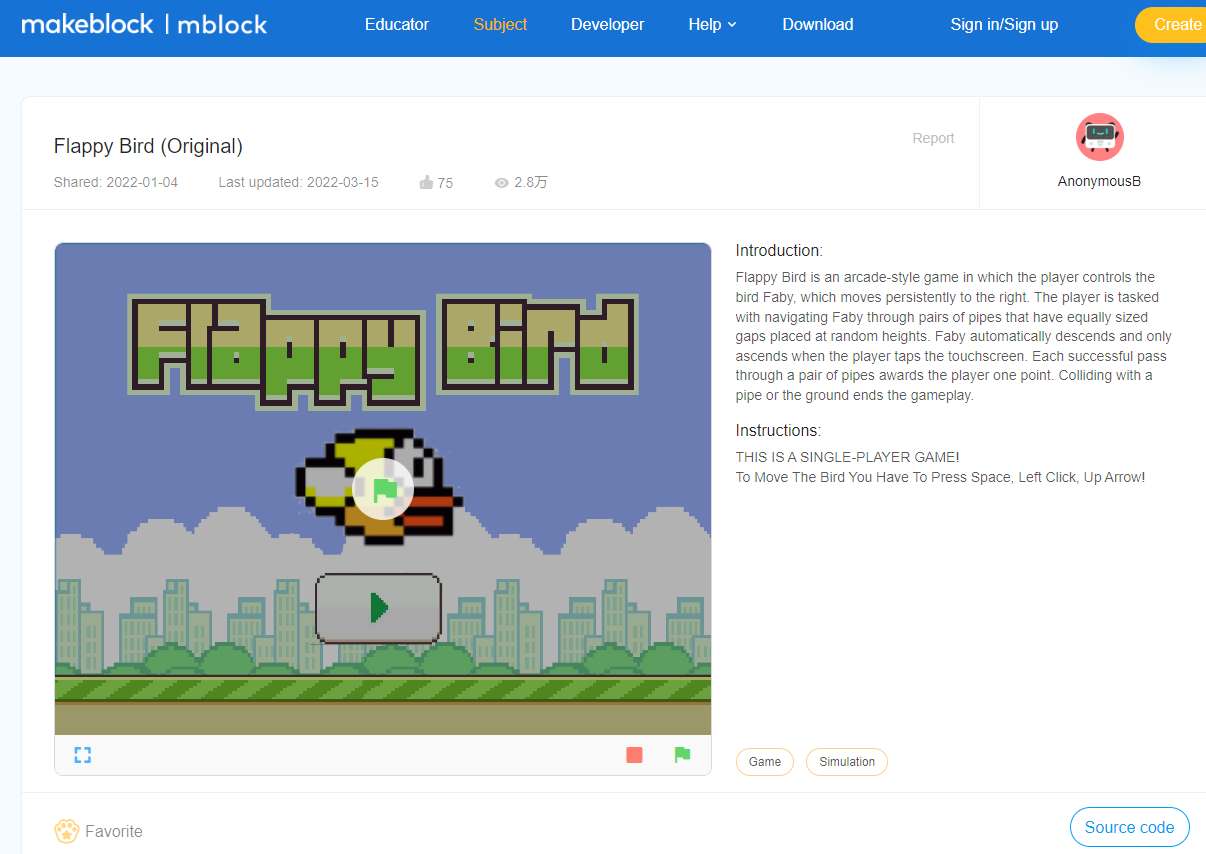
Flappy bird
Un ejemplo de interactuar con objetos es hacer que estos se muevan utilizando los sensores de mBot
Vamos a jugar al Flappy Bird, pero para que suba el pájaro que sea cuando el sensor de ultrasonidos detecte nuestra mano
Primer paso, descargar el programa Flappy Bird
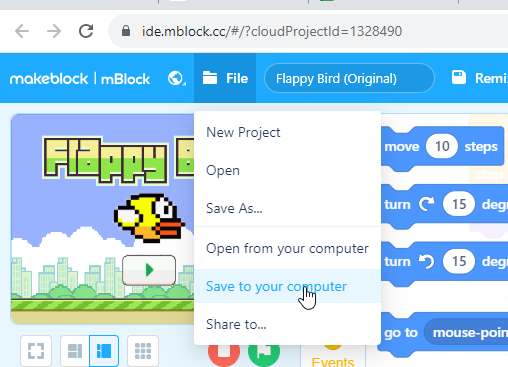
No vamos a realizar el videojuego desde cero, aprovecharemos el código que hay en Internet. Vamos al proyecto https://planet.mblock.cc/project/1328490 y en Sourcecode nos descargamos en nuestro ordenador el código (se abrirá mBlock online, y damos a descargar el código en nuestro ordenador)
(este paso te lo puedes saltar si quieres trabajar diréctamente en Internet)
Segundo paso abrir el código en tu programa mBlock
Abrimos este código en nuestro mBlock (este paso te lo puedes saltar si quieres trabajar diréctamente en Internet)

Tercer paso, que mBot envíe un mensaje que se ha puesto la mano
Añadimos el dispositivo mBot, conectamos y ponemos este código
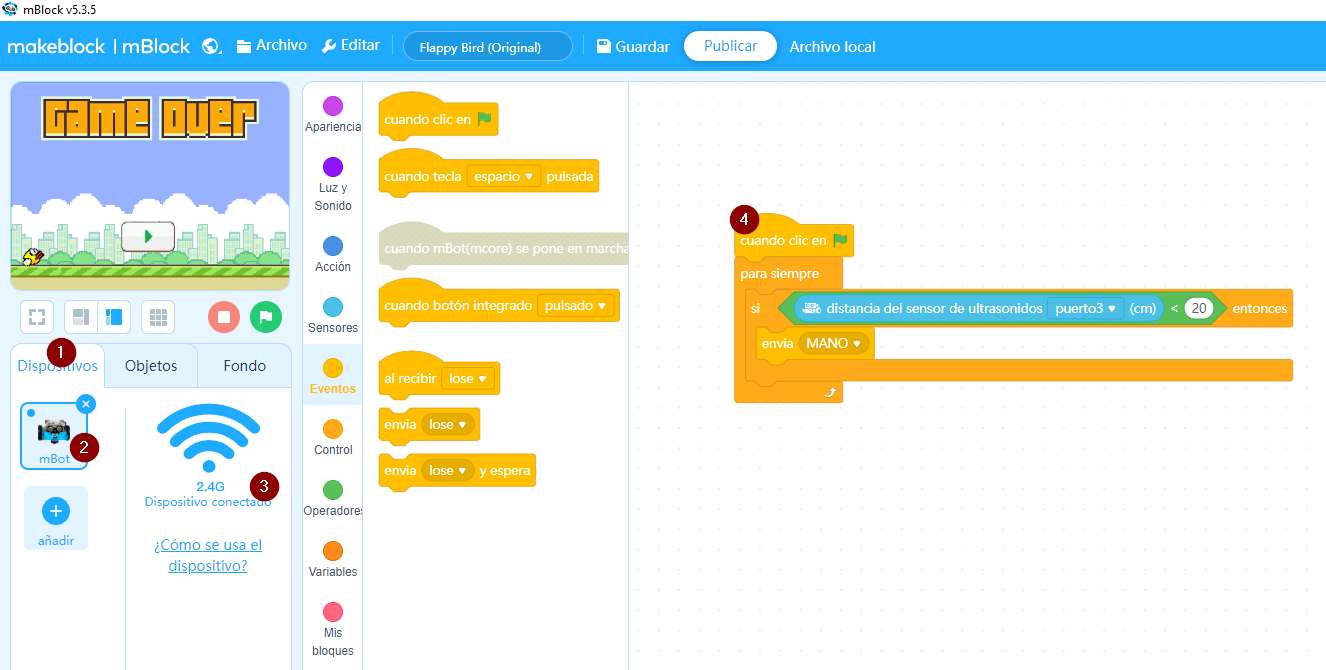
También podríamos haber usado UNA VARIABLE GLOBAL MANO de tal manera que por ejemplo cambie a 1 si se pone la mano y sea 0 si no se pone la mano
Cuarto paso que Flappybird suba al poner la mano
Vamos al código del objeto BirdySprite y vemos que sube si O se pulsa clic O se pulsa espacio O se pulsa flecha arriba, copiamos ese código y que suba si recibe el mensaje MANO
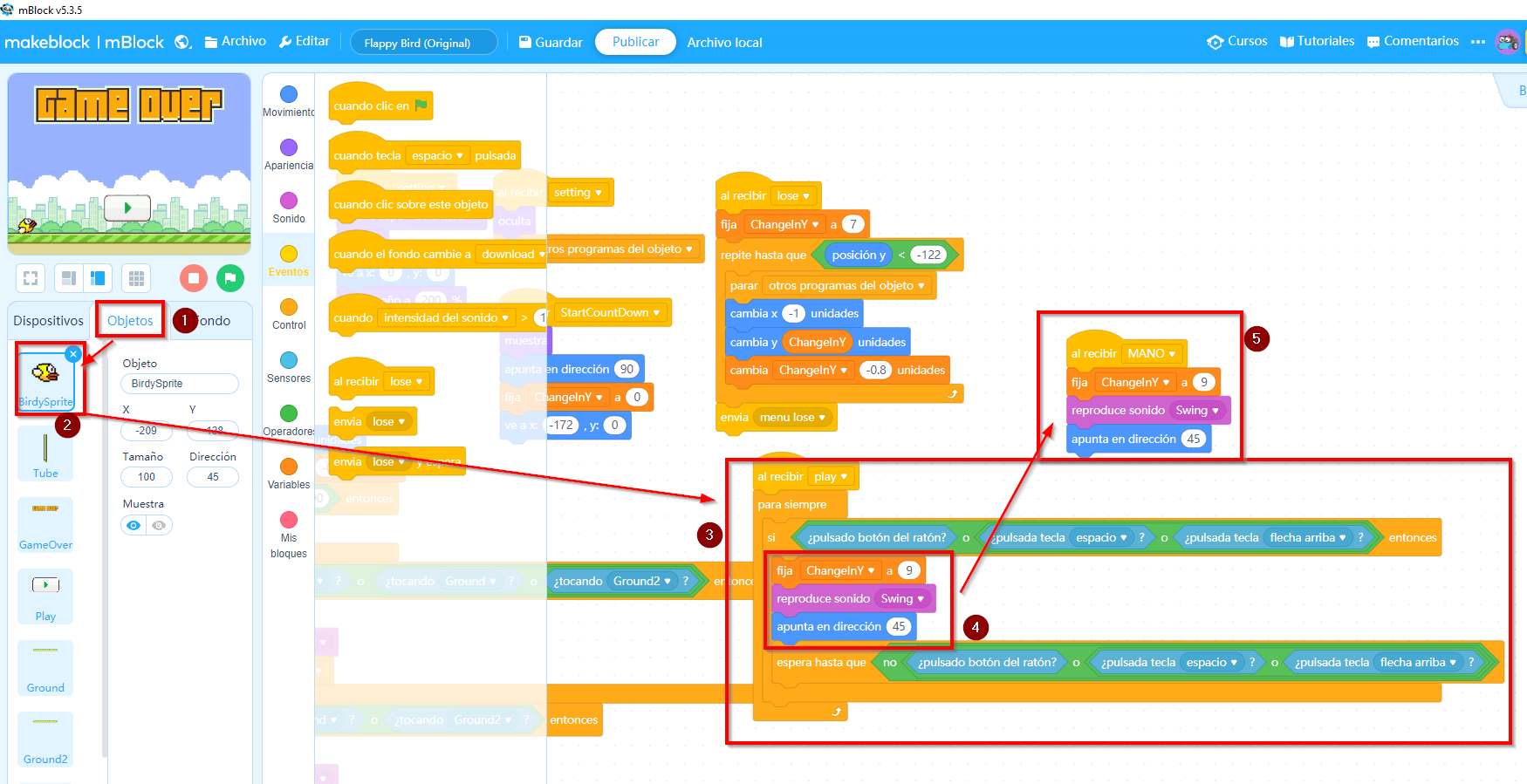
Si usamos variables globales se pondría dentro de la instrucción O la condición MANO=1
Resultado
Valeee... ya sé que soy muy malo
Publica tus construcciones
Publica cosas de otros
4 IA Introducción
IA¿Qué es?
La inteligencia artificial se refiere al conjunto de algoritmos realizan tareas complejas, que son capaces de realizar procedimientos que imitan el funcionamiento de la mente, como son aprender y tomar decisiones.
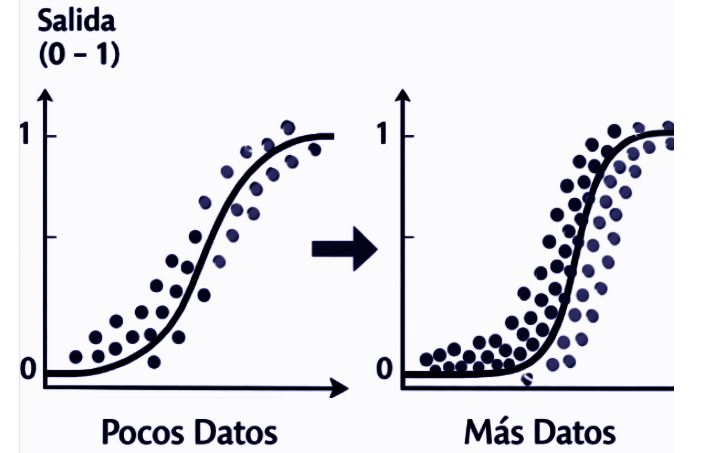
En el fondo la IA son tomas de decisiones: Un sumatorio de muchos función sigmoide asociadas a variable de entrada que cuanto más datos, más empinada y por lo tanto más certera es su decisión (salida).
Por ejemplo, le pedimos a un robot con IA que tomando de muestra la temperatura corporal, nos diga si estamos enfermos o no.
- Salida eje Y 0=no estamos enfermos 1= estamos enfermos.
- Entrada: eje X La temperatura
Los puntos son las muestras que le pasamos para que aprenda
- Los puntos son dada una temperatura, % de gente que esta enferma a esa temperatura
- Estadísticamente cuanto más temperatura hay más probabilidad de que estés enfermo
- Cuanto más datos, más empinada es la función y con más acierto puede predecir.
- Nosotros sabemos ya la respuesta que el valor crítico es 37ºC pero... ¿y si tiene 36.9ºC?¿Cuánta probabilidad tiene? las máquinas nos ayudan a cuantificar.
IA Tipos
ML : APRENDIZAJE AUTOMATICO O MACHINE LEARNING
Aquí los algoritmos aprenden a partir de datos, y ellos buscan patrones para identificar. Cuanto más datos, mejores resultados.
El principio es básico. Queremos diferenciar silla mesa: Analiza datos, localiza patrones (cuatro patas, algo común, el tamaño y forma, patrones que diferencian como el respaldo....) con esas características, puede realizar un entrenamiento, y por lo tanto esta preparado para realizar predicciones.
Hay varios tipos de ML:
- ML Aprendizaje automático supervisado Donde los datos se les da ya etiquetados
- ML Aprendizaje automático no supervisado: Aquí es el propio algoritmo que tiene que encontrar relaciones en el proceso de identificación de patrones y por lo tanto etiquetar categorías.
- ML Aprendizaje semisupervisado. El modelo se entrena con datos etiquetados y no etiquetados. Lo normal es primero los etiquetados (pues son los que implican mayor coste y dinero) y si el modelo ya empieza a funcionar bien, ya procesa no etiquetados para su optimización.
RL : APRENDIZAJE REFORZADO O REINFORCEMENT LEARNING
Es un modelo que busca la optimización. Utiliza resultados anteriores e intenta mejorarlos. Para buscar esto, se definen estados con unos parámetros que implican premio o penalización. La máquina busca soluciones y acciones para buscar los premios y huir de las penalizaciones.
DL : APRENDIZAJE PROFUNDO O DEEP LEARNING
Es un subconjunto del ML no supervisado, Se crea una red neuronal organizadas en capas, cada capa especializada, por ejemplo la primera de entrada recoge los datos, las intermedias, ya ocultas, identifican patrones y la última, la salida que recoge la información procesada anteriores, la que toma las decisiones.
PLN : PROCESAMIENTO DE LENGUAJE NATURAL
Utiliza conceptos de DL y ML para comprender el lenguaje humano. Una aplicación son los chatbots. Que pueden ser:
- dirigidos, es decir va tomando decisiones por etapas tipo árbol y da respuestas automáticas
- no dirigido: produce respuestas en función del contexto y las decisiones del usuario.
- hibridas que intenta producir una conversación fluida.
EJEMPLOS
LEARNING ML 
https://web.learningml.org/en/home/
ML: MACHINE LEARNING FOR KIDS ![]()
https://machinelearningforkids.co.uk/#!/welcome
Ver nuestro tutorial en https://libros.catedu.es/books/robotica-educativa-con-mbot/page/maquina-educable-con-machine-learning-for-kids-y-scratch
DL REDES NEURONALES : QUICKDRAW 
https://quickdraw.withgoogle.com/ Es un videojuego donde se ve claramente como se va perfilando las decisiones en forma de árbol y como la etapa final va reconociendo tu dibujo. En esta red, la primera etapa de la red neuronal son trazos que dibujas, y las neuronas intermedias son fruto de una extensa base de datos de dibujos. La última etapa es la decisión basada en las anteriores neuronas.
PRUEBALO ES SUPERDIVERTIDO, INCLUSO EN UN MÓVIL 
PLN: CHATGPT COMO FUNCIONA
DL CREA TU PEQUEÑA RED NEURONAL CON PYTHON
DL: GOOGLE DEEPMIND
Google deepmind desarrolló una red neuronal para aprender a jugar videojuegos, y ganó a varios campeones humanos en videojuegos complejos (de los que inicialmente la máquina desconocía las reglas). Puedes ver en https://deepmind.google/ los diferentes proyectos actuales.
IA: Y en plan que se entienda....
-
MÁQUINAS “YA EDUCADAS” o "pre-trained ML/AI models"
-
Reconocimiento de imágenes con mBlock
-
Programa de reconocimiento imágenes
-
Programa reconocimiento edad
-
-
Reconocimiento de voz
-
Traductor Con mBlock y Cybperpi
-
Reconocimiento de órdenes Con mBot1 t mBot2
-
-
-
SOFTWARE EDUCABLES o "No pre-trained ML/AI models"
-
Máquina educable Teachable Learning y mBlock
-
Máquina educable con CODE.ORG
-
Máquina educable con Machine Learning for kids y Scratch
-
-
HARDWARE EDUCABLES o sea, que tienen "Smart gadgets"
-
SMARTCAM y mBot1
-
Seguir pelota color
-
Sigue líneas
-
-

Photo by Kenny Eliason on Unsplash
5. IA máquinas ya educadas
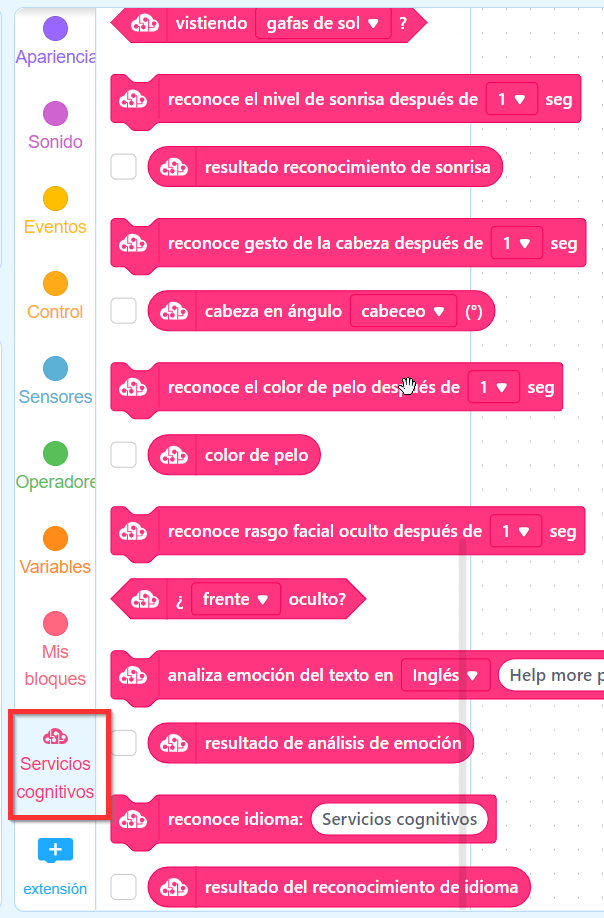
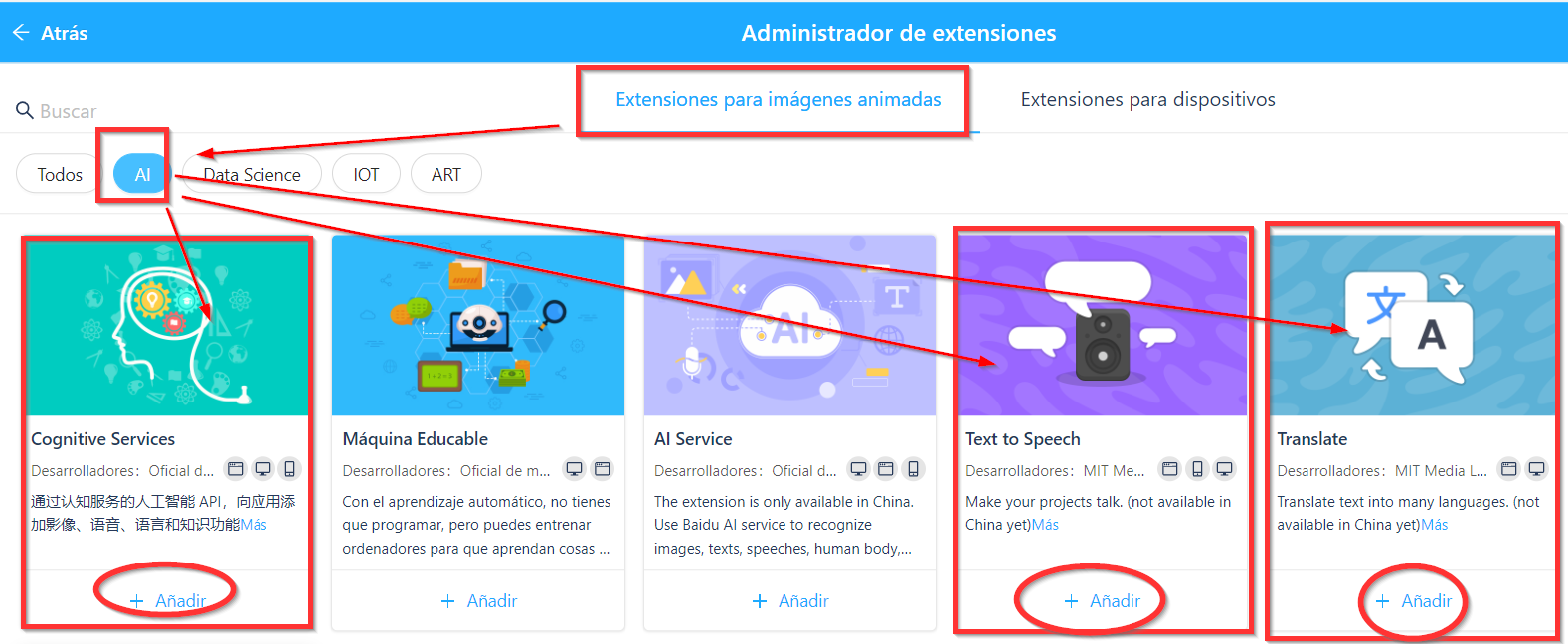
Cognitive Services Servicios cognitivos.
Esta extensión pertenece al conjunto de extensiones de inteligencia artificial de mBlock
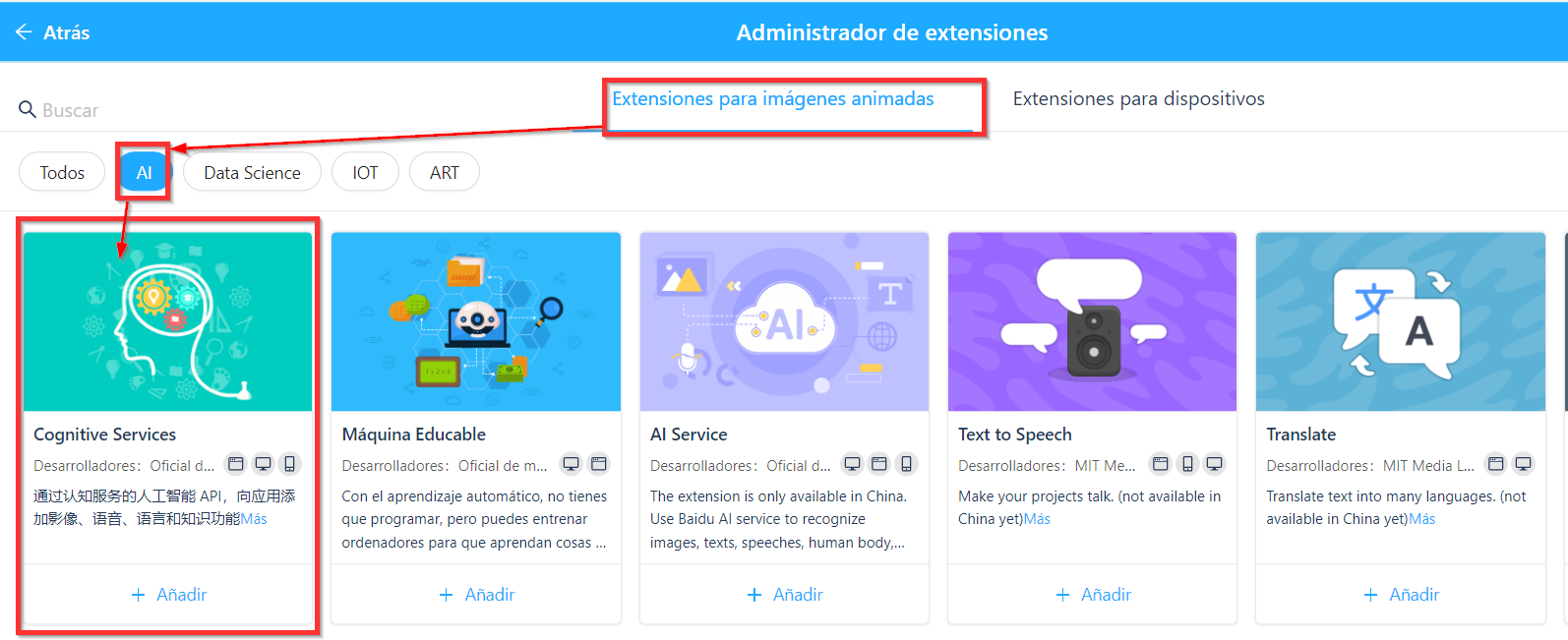
Instala un montón de instrucciones como
- Reconocimiento de voz (en diferentes idiomas)
- Reconocimiento de texto impreso (en diferentes idiomas)
- Reconocimiento de imagen (marca, famoso, monumento...)
- Reconocimiento de emociones
- Reconoce rasgos como gafas, nivel de sonrisa, cabeceo de la cabeza, color del pelo ...
RECONOCIMIENTO DE EDAD
Para ver un vistazo rápido, vamos a utilizar un programa ya predeterminado, ir a Programas de ejemplo - AI - Age Analyzer (el del pulpo)
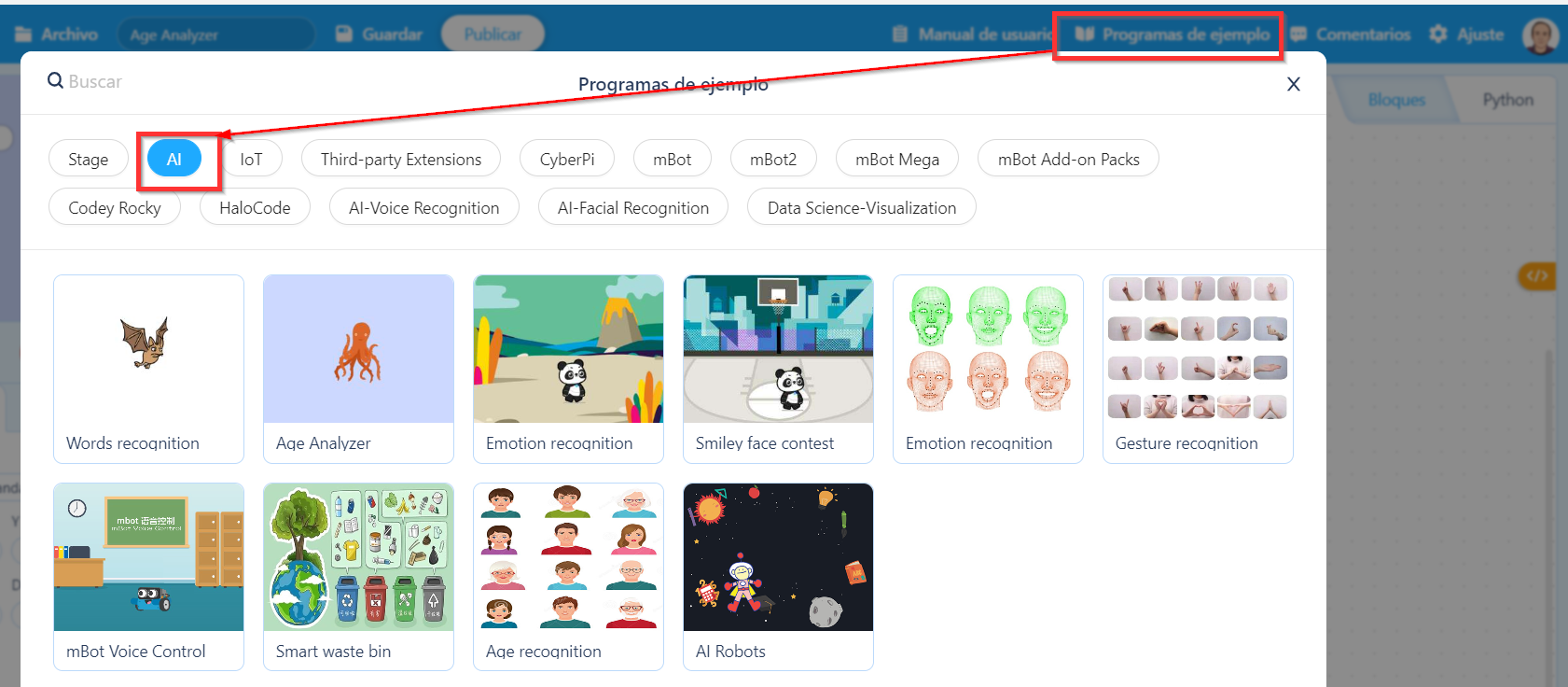
OJO, SI NO ESTAS LOGUEADO entonces NO FUNCIONA
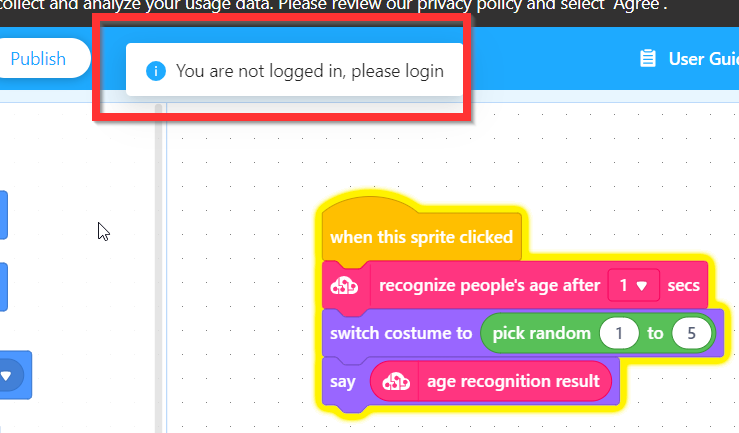
La verdad es que acierta bastante bien

Otro ejemplo de uso, reconocimiento de edad y traducción :
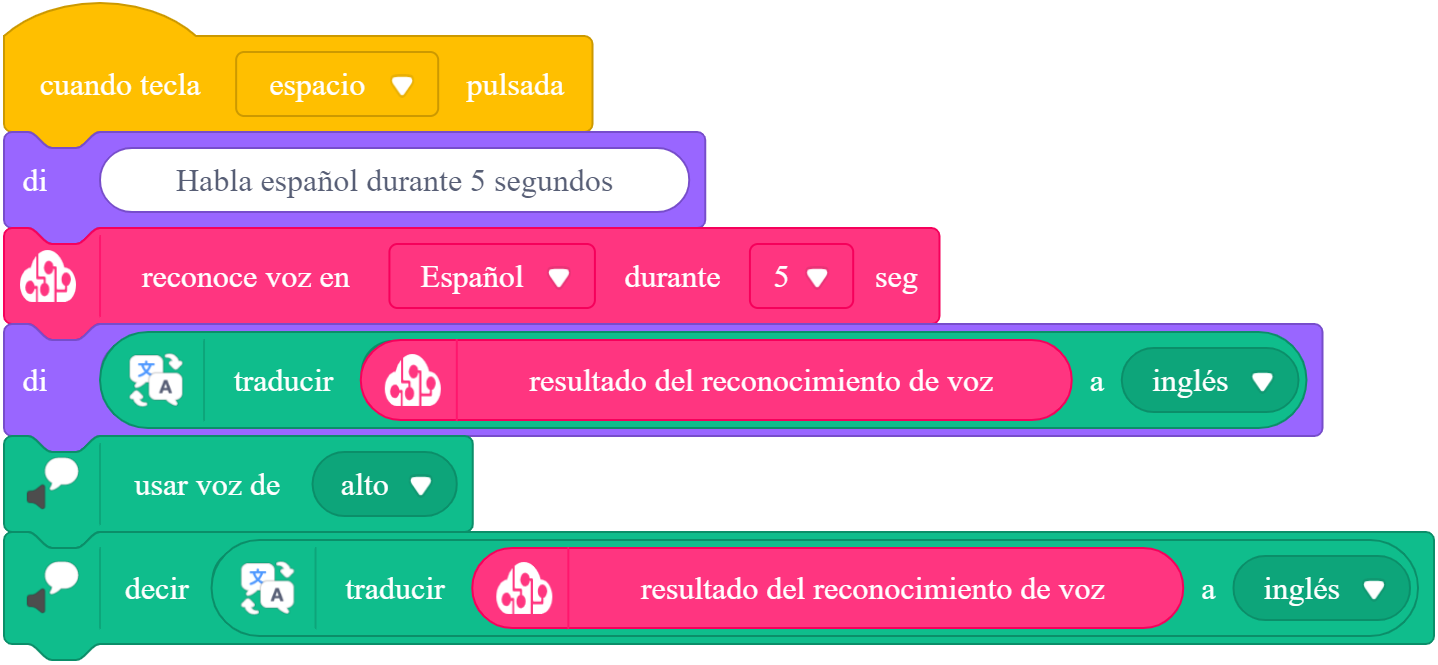
Traductor
En este programa, además de usar la extensión Servicios Cognitivos, instalaremos las extensiones :
- Text to Speech - Texto a voz
- Translate - Traductor
El programa es muy sencillo, lo tienes aquí : https://planet.mblock.cc/project/3733312
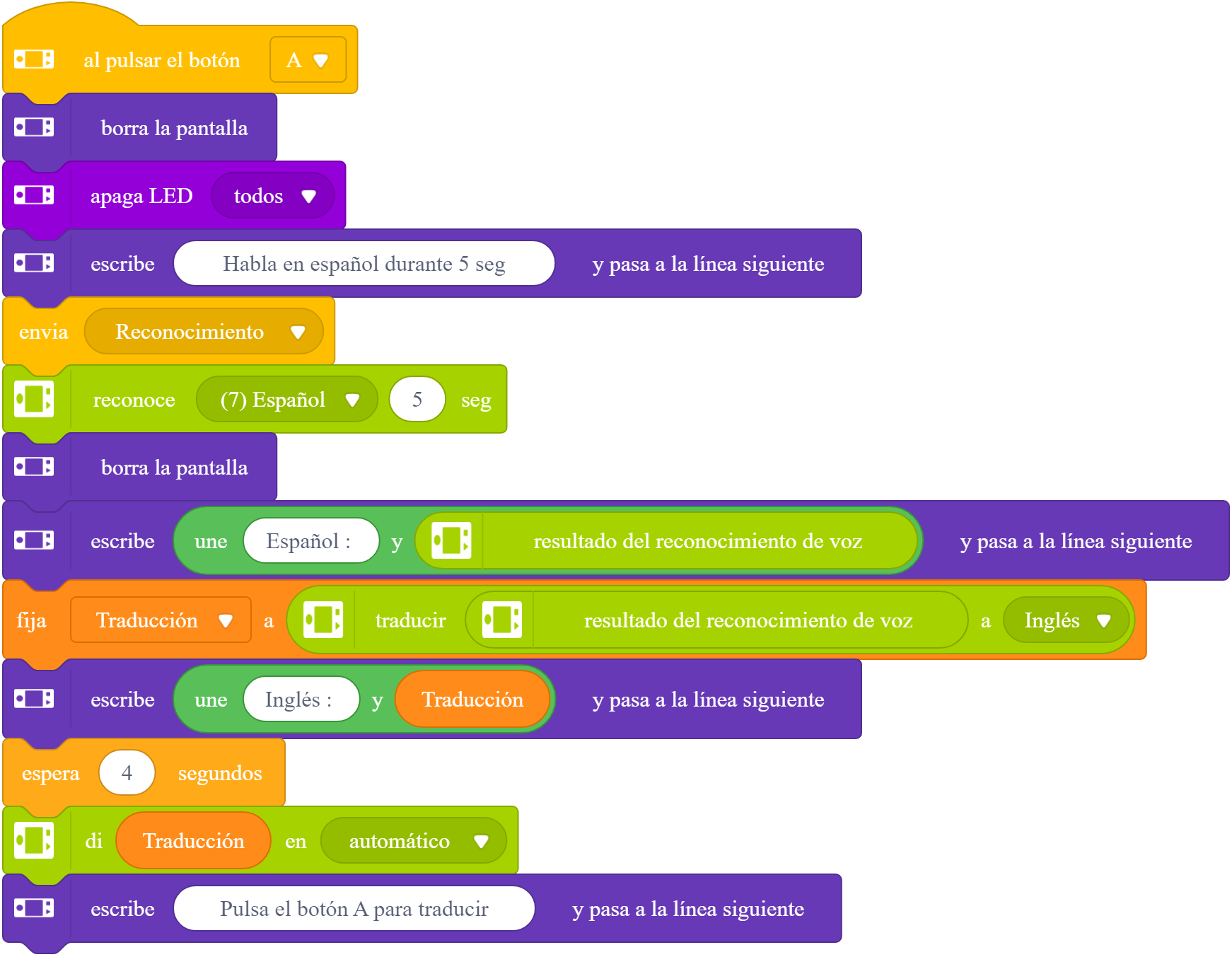
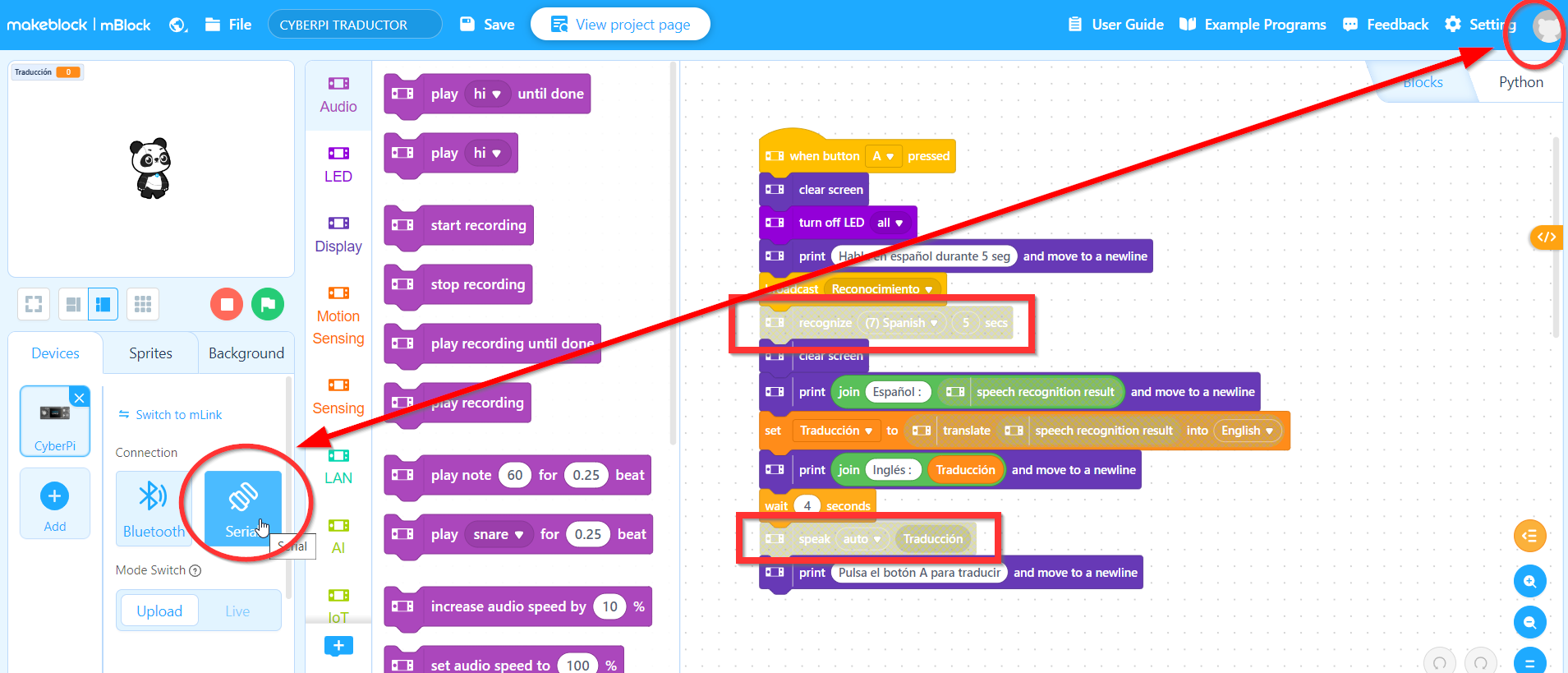
Traductor con mBot2 (o mejor dicho con Cyberpi)
Esta tarjeta controladora es un ESP32 por lo tanto permite conexión a Internet y lo podemos usar para realizar el mismo script de traducción
El programa lo tienes aquí https://planet.mblock.cc/project/3587357
Lo primero es conectarse a la Wifi :
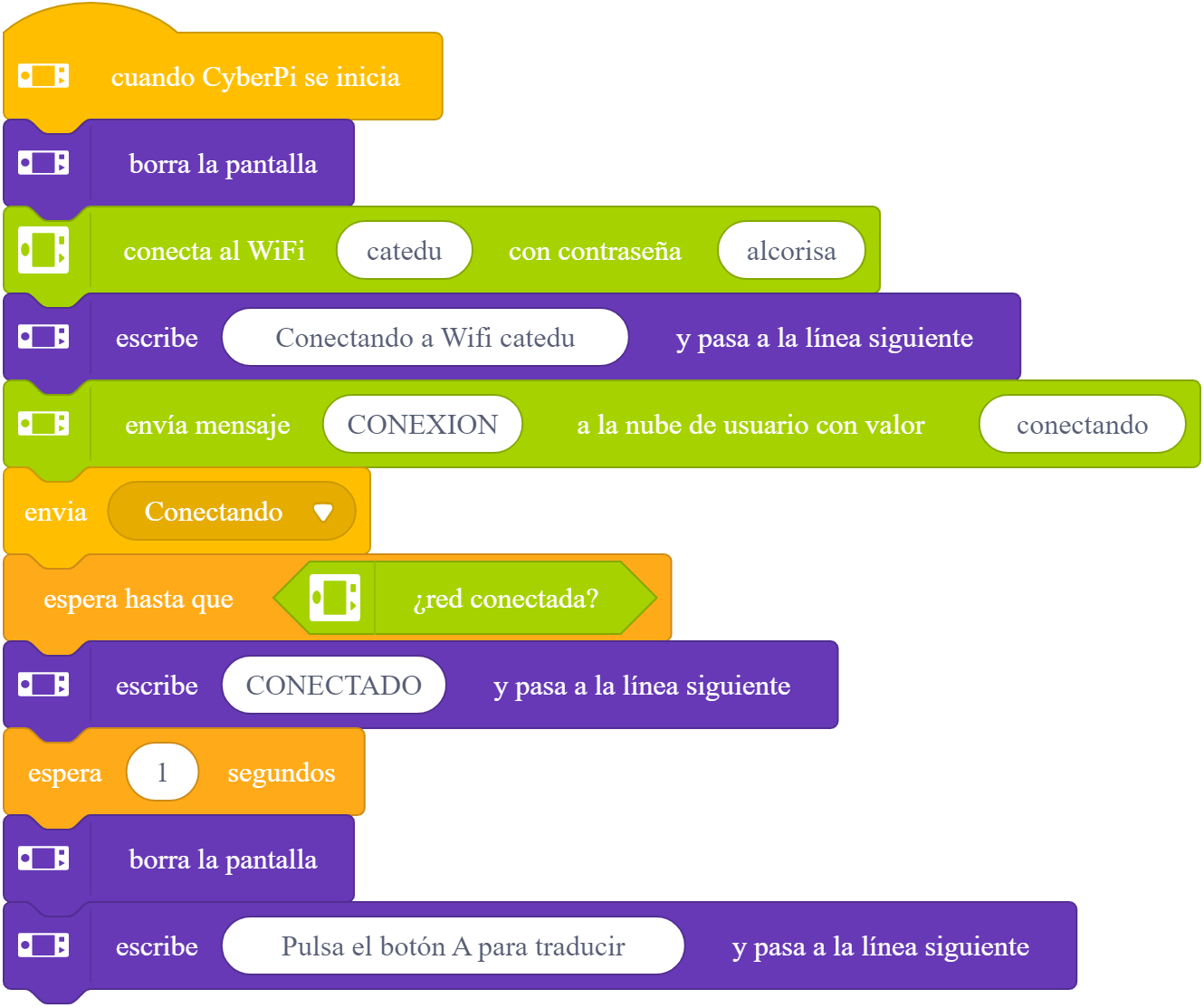
Y para traducir
OJO: HASTA QUE NO ESTES
1.-LOGUEADO con tu usuario en mBlock
2.-CONECTADO CON CYBERPI
(las dos condiciones y en ese orden) NO SE VISUALIZAN LAS INSTRUCCIONES DE INTELIGENCIA ARTIFICIAL
Reconocimiento de voz- órdenes a mBot1
Se hace con la misma extensión Cognitive Services Servicios cognitivos, podemos hacer que el panda reconozca la voz
El programa https://planet.mblock.cc/project/3733229
Si te fijas TENEMOS QUE TRABAJAR EN VIVO pues la traducción la realiza el ordenador (mejor dicho el servidor de traducción y se lo comunica al ordenador y el ordenador a mBot1 pues mBot1 no tiene conexión de Internet
El programa en el Sprite oso Panda es :

Y mBot que ejecuta según la orden
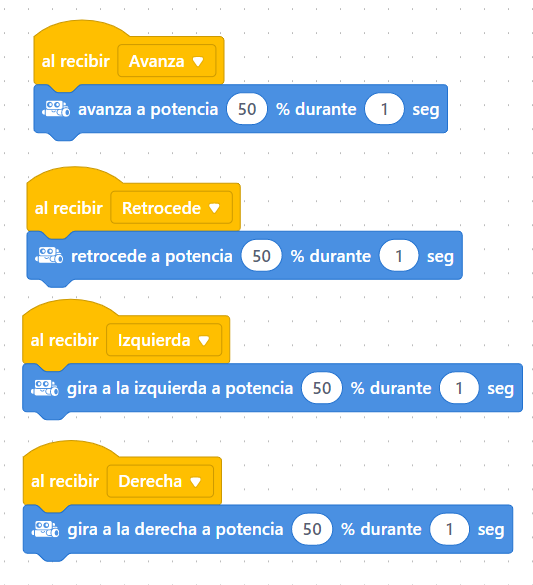
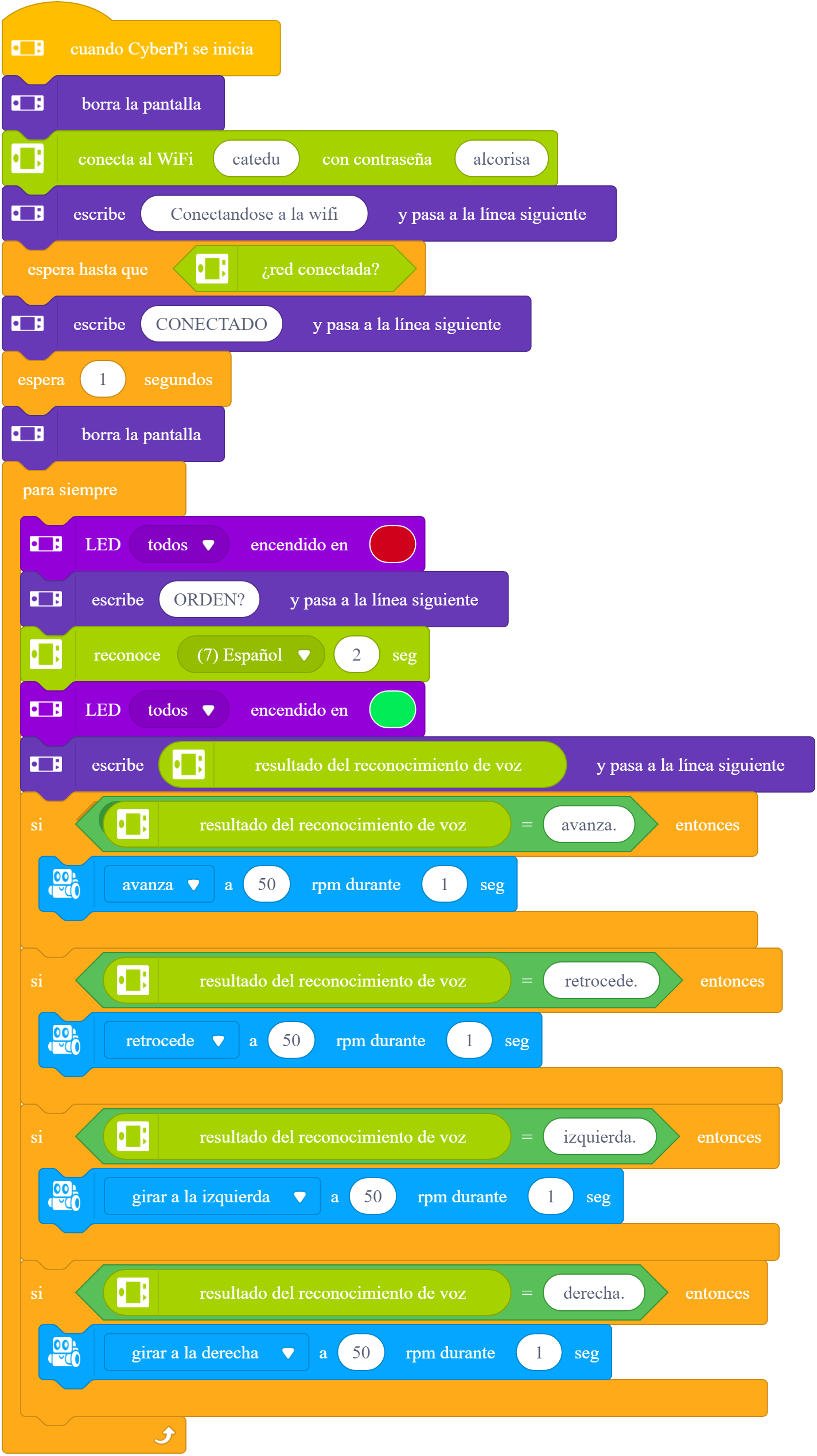
Reconocimiento de voz- órdenes a mBot2
Aquí no trabajaremos en vivo SINO EN CARGA pues CibyerPi tiene conexión a Internet
La primera parte es el script de conexión de Wifi La siguiente orden es reconocer la voz, y según el resultado, que ejecuta.
Como puedes observar, la orden de reconocimiento de voz, añade un . al final que hay que tener en cuenta
El programa lo tienes aquí https://planet.mblock.cc/project/3733278
Video Sensing: esto no es IA
El siguiente programa no interpreta las imágenes, simplemente estamos utilizando la webcam como sensor de vídeo
https://planet.mblock.cc/project/3730511
Extensión Video Sensing

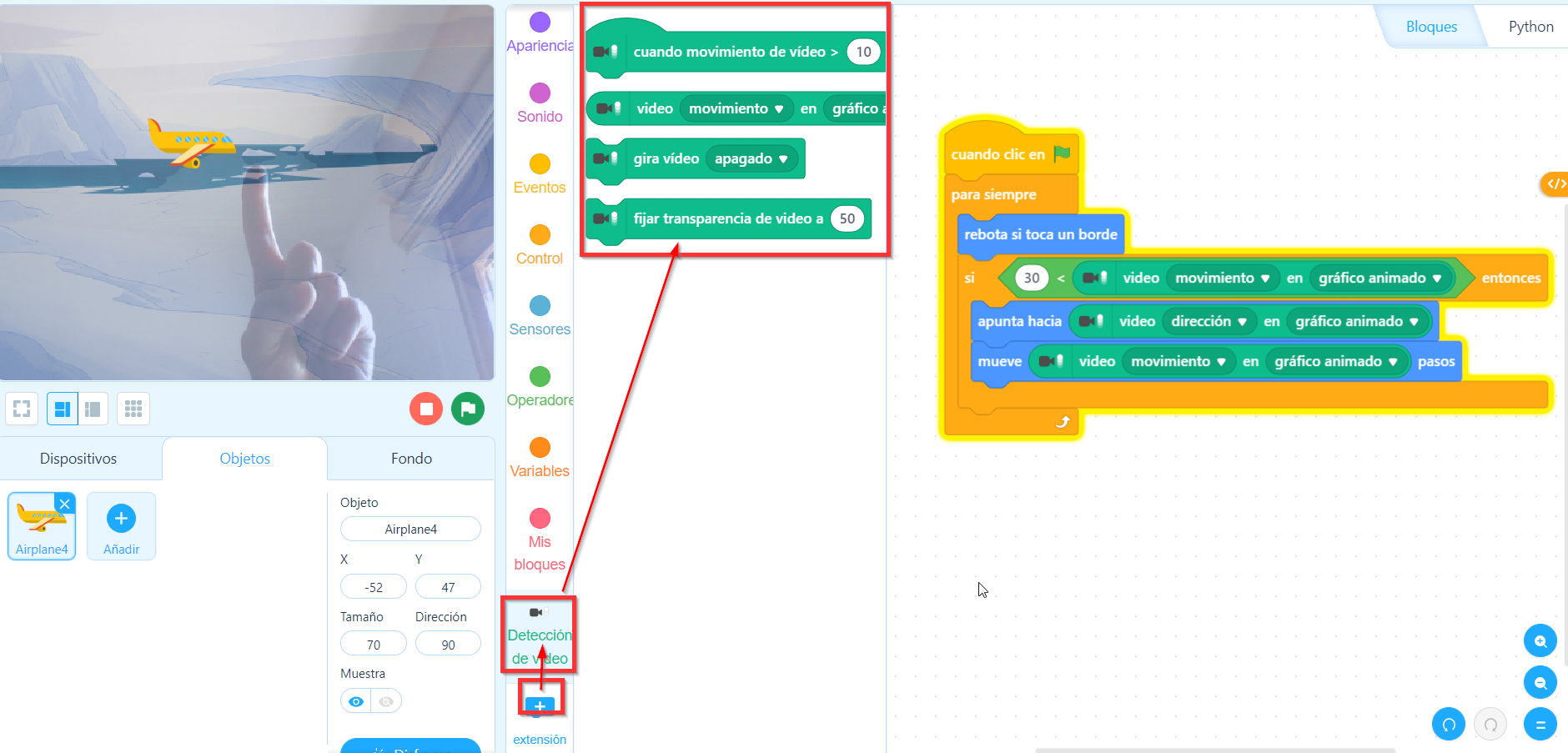
+ info de esta extensión en https://barclayscodeplayground.co.uk/content/dam/barclayscodeplayground-co-uk/documents/scratch/SC_Using_Video_sensing_teachers_guide.pdf
Google quickdraw
Un ejemplo de software ya educada es https://quickdraw.withgoogle.com/ (se recomienda hacerlo en una tableta) donde tus dibujos son reconocidos por un conjunto enorme de dibujos. (A la vez los que tú haces él aprende)
Si quieres probar más cosas de AI con Google https://experiments.withgoogle.com/collection/ai
6. IA Software educable
Maquina educable con Machine Learning for kids y Scratch
REGISTRO
Entramos en https://machinelearningforkids.co.uk/

Tenemos varias opciones:
- Registrarnos y tenemos dos opciones
- como Un profesor o responsable de un club de programación en este caso tenemos otras dos opcioens
- Clase No administrada tienes que rellenar un formulario típico y creas la clase
- Clase administrada donde tienes opciones de incorporar alumnos a tu clase, este registro es por correo electrónico y tienen que verificar que perteneces a un centro educativo.
- como Estudiante en ese caso es el profesor de una clase administrada el que te tiene que crear la cuenta
- como Un profesor o responsable de un club de programación en este caso tenemos otras dos opcioens
- Iniciar sesión pues nos hemos registrado con alguna de las opciones anteriores
- Probar sin registrarse
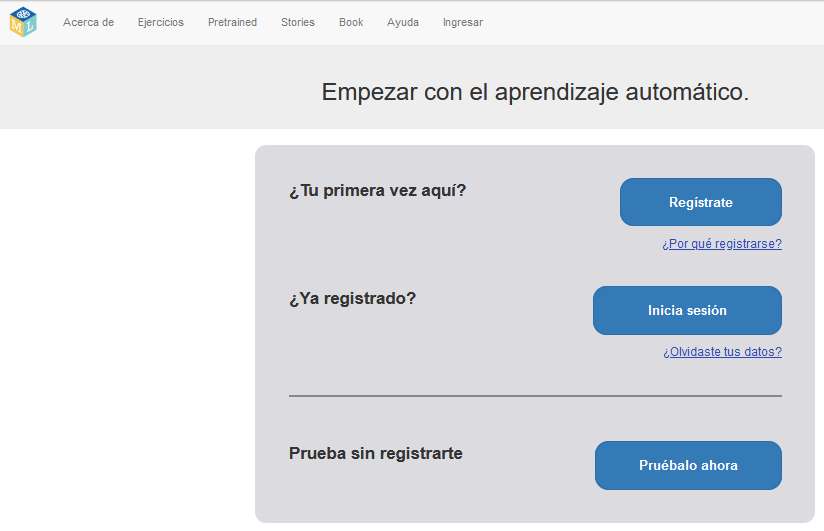
Vamos a probar "sin registrarnos" pues estamos aprendiendo. Si luego esta herramienta te convence, Te registras
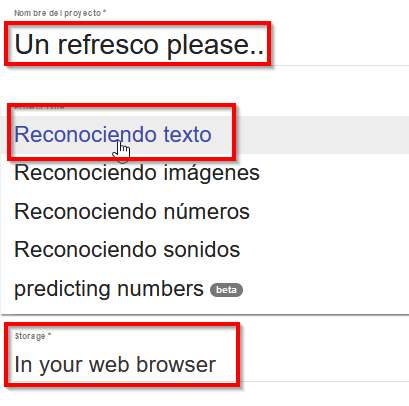
CREAMOS UN PROYECTO
Empezamos un proyecto

Empezamos un proyecto, como puedes ver hay diferentes formas de reconocer, y permite hacer un almacenamiento local, o en la nube. Como es algo de pruebas puedes hacerlo local. Pero si luego estas registrado es interesante hacerlo en la nube para tener acceso en cualquier sitio.
Ya lo tenemos

ENTRENAR
Primero vamos a entrenar la máquina

Creamos dos etiquetas y vamos escribiendo situaciones (o añadir un fichero txt) donde nos apetece un refresco o no (pueden ser más de dos situaciones)

Volvemos al proyecto..

ENTRENAR
Si ves que has puesto suficientes ejemplos, pide a la máquina que entrene
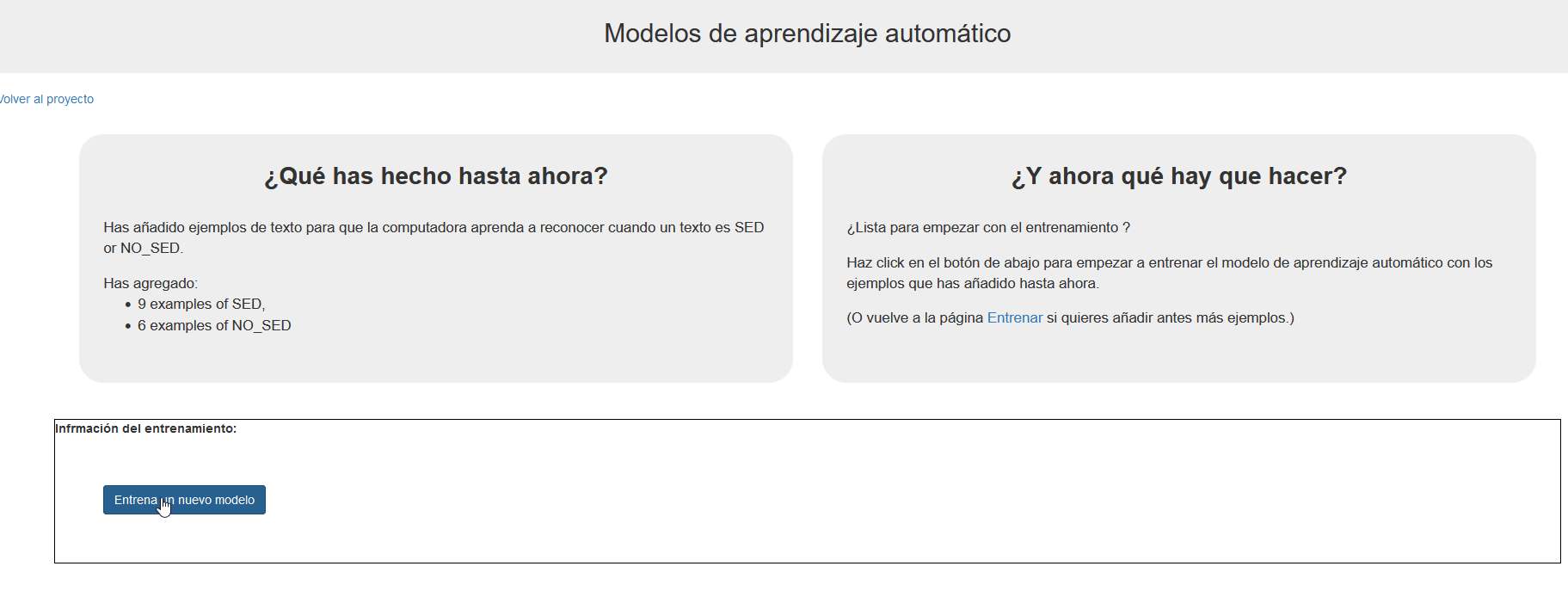
Empieza el entrenamiento... y para que no te aburras, te pone unas preguntas !!!
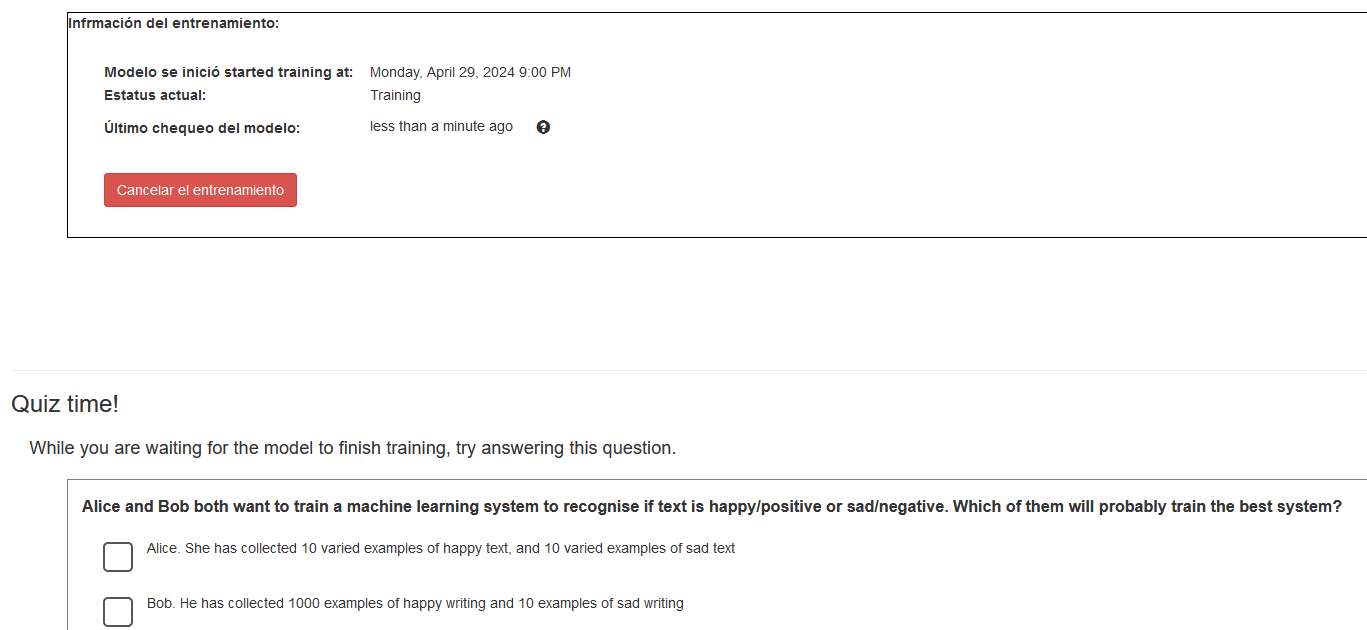
Una vez acabado puedes probarlo

fíjate que bochorno no lo hemos puesto en el entrenamiento y ha acertado bastante bien

Volvemos al proyecto
CREAR
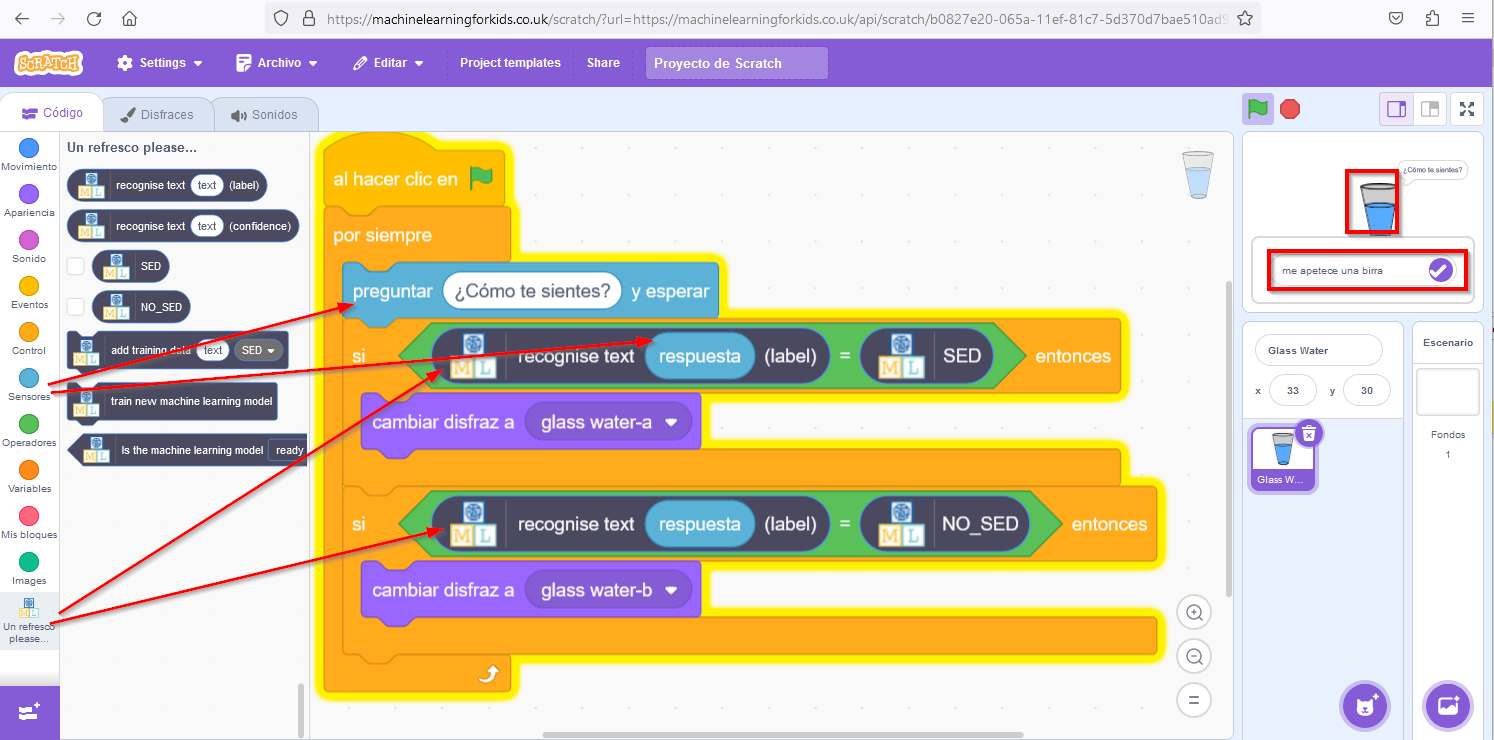
Y vamos a CREAR y nos ofrece varias herramientas de programación, elegimos SCRATCH

Le damos a Abrir en Scratch 3

Elegimos un nuevo objeto (quitamos el gato)
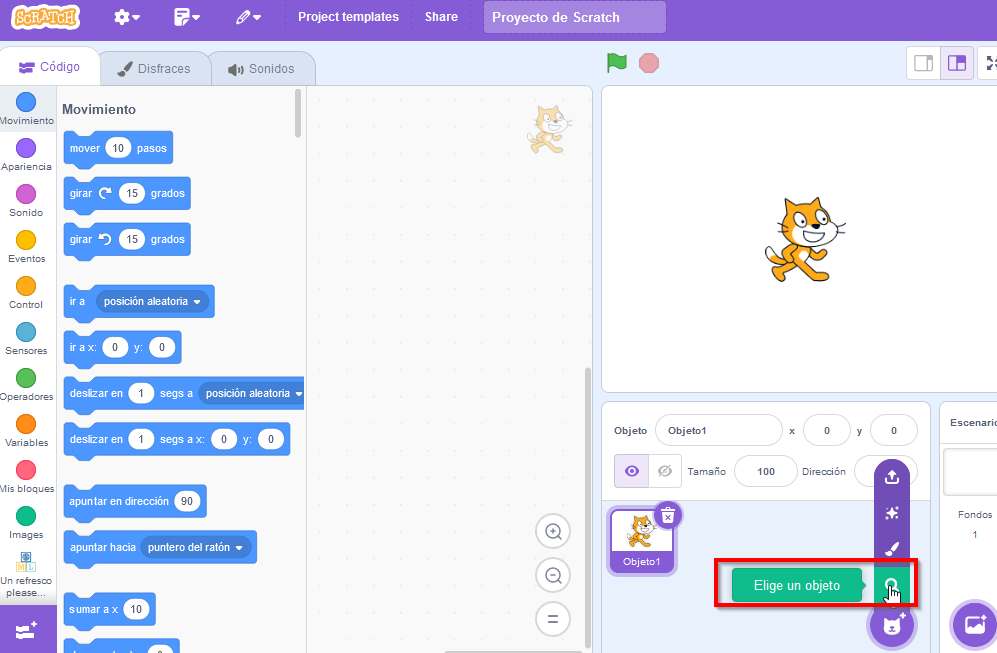
y elegimos glass water
Y ponemos el siguiente programa, no es perfecto... pero acierta bastante bien
¿Sabías que ....?
.. hay un curso en Aularagón de INTELIGENCIA ARTIFICIAL CON SCRATCH máquina educable con Maching Learning for KitsVes https://libros.catedu.es/books/inteligencia-artificial-con-scratch con diferentes vídeos del INTEF verás paso a paso esta herramienta desde 2019
Máquina Educable Teachable Machine
Esta extensión sí que pertenece al conjunto de inteligencia artificial
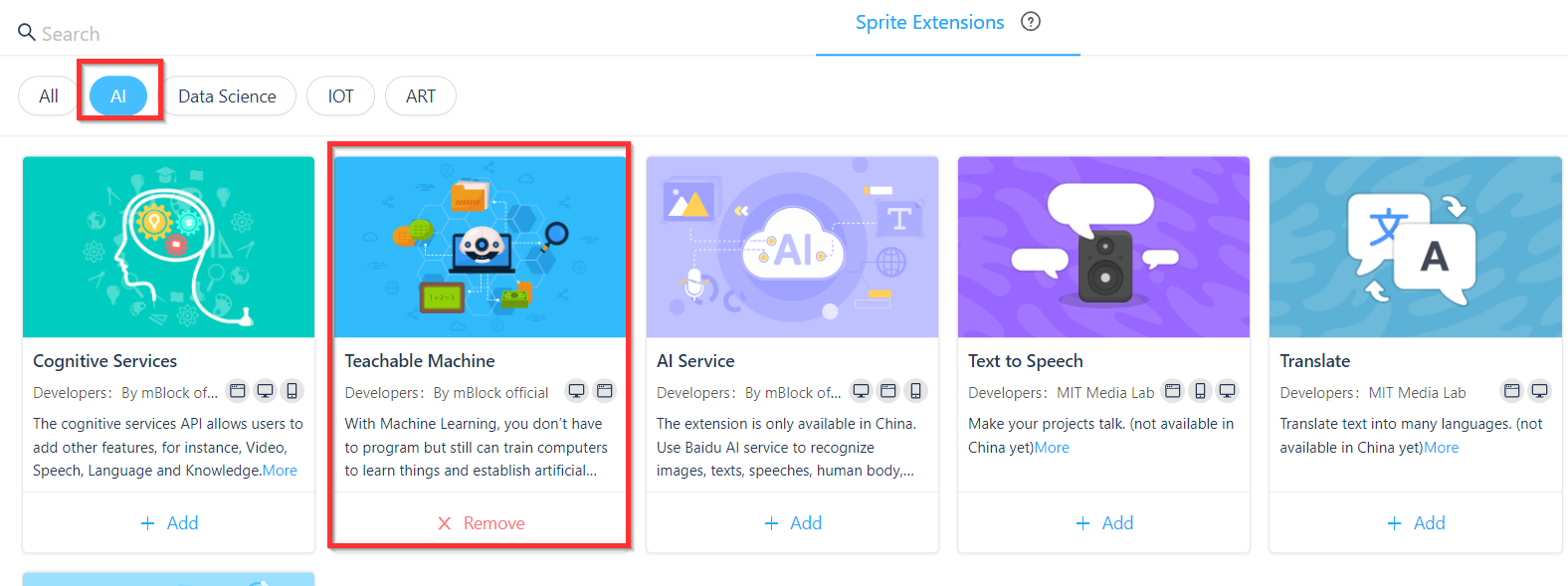
En la extensión nos muestra la posibilidad de crear un nuevo modelo de entrenamiento
Al crear un nuevo modelo, Build a new model hay que definir las categorías mínimo son tres
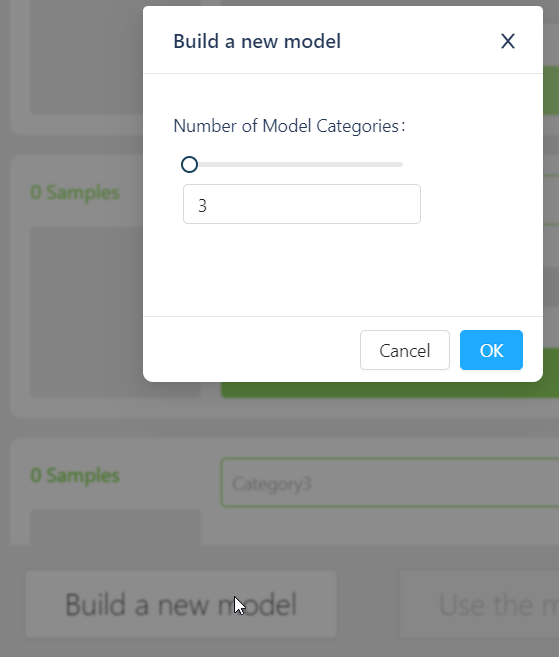
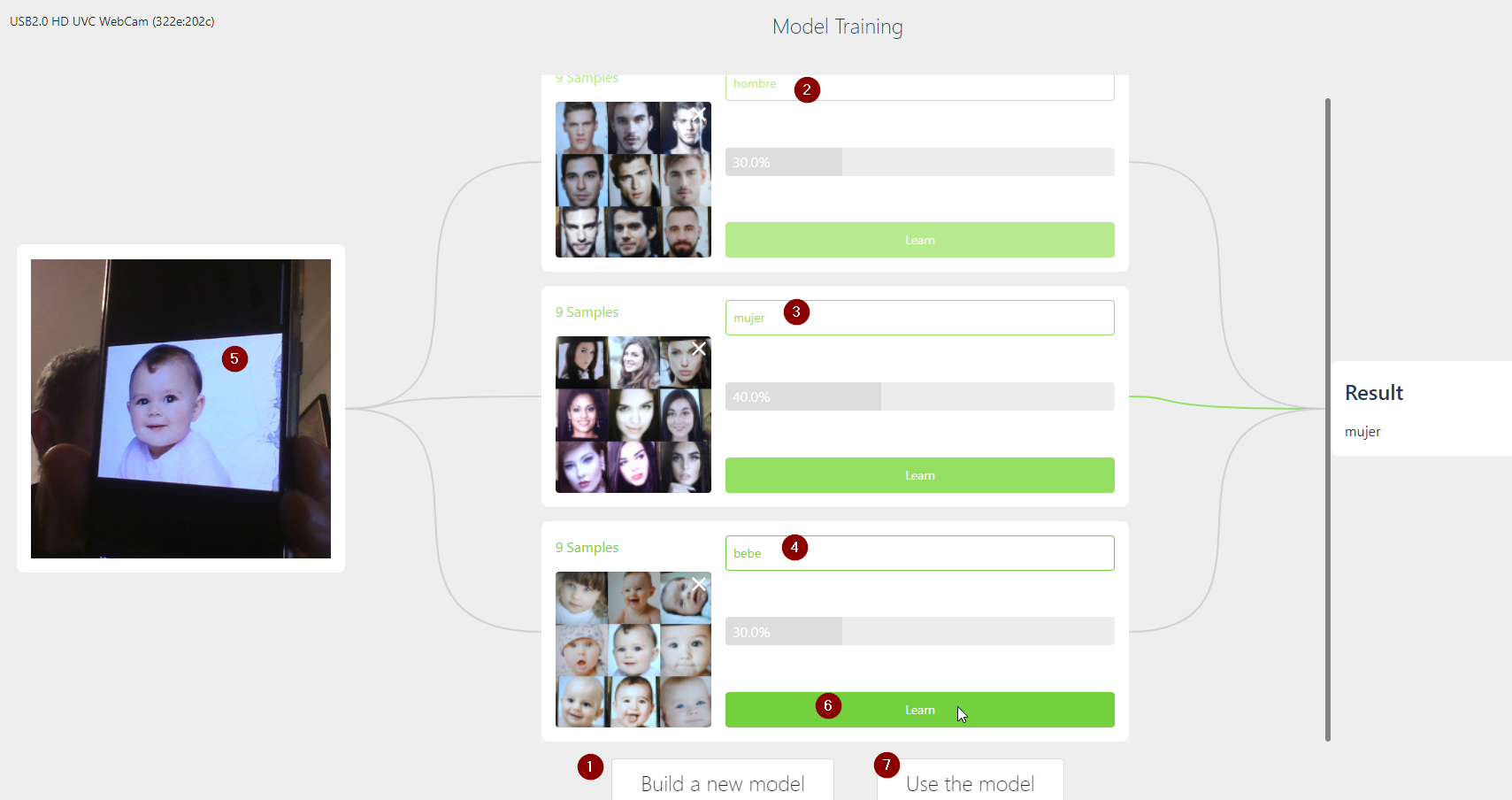
2 - 3 - 4 .- Poner nombres a la categorías
5.- Poner la imagen (en mi caso pantallazos del móvil)
6.- Clicar a qué categoría pertenece, para que aprenda, darle click cuando la barra verde suba
Repetir pasos 5 y 6 tantas veces cuanto se desee, cuanto más, mejor
7.-Usar el modelo de aprendizaje
Una vez creado el modelo, nos pone unas instrucciones que podemos usar en nuestra programación
Otro ejemplo parecido usando playmovil
Maquina educable con CODE ORG
Una manera muy didáctica de enseñar los conceptos de Inteligencia Artificial es con CODE.ORG tiene cursos y el funcionamiento es parecido a la Máquina Educable de mBlock

El resultado es

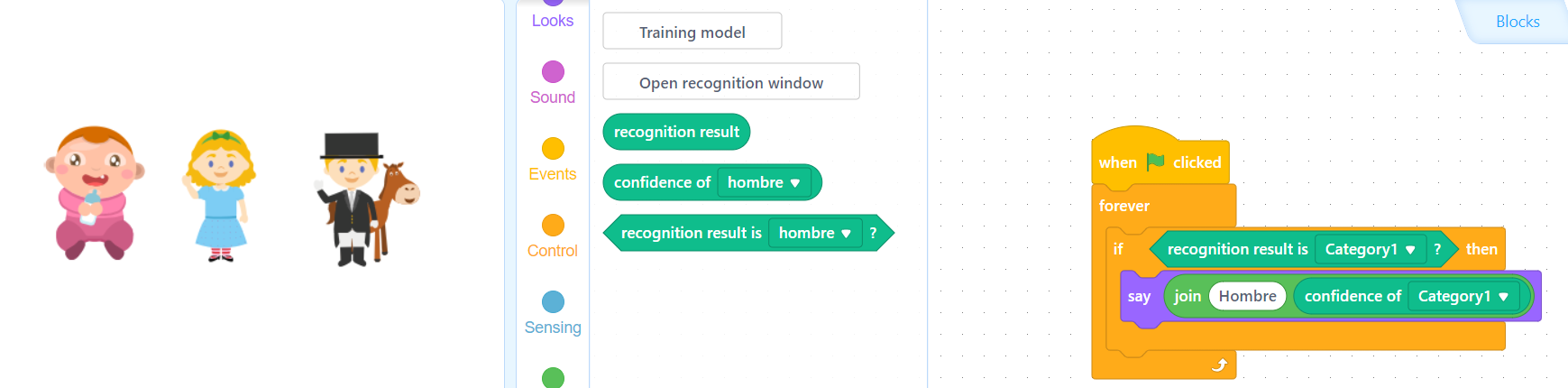
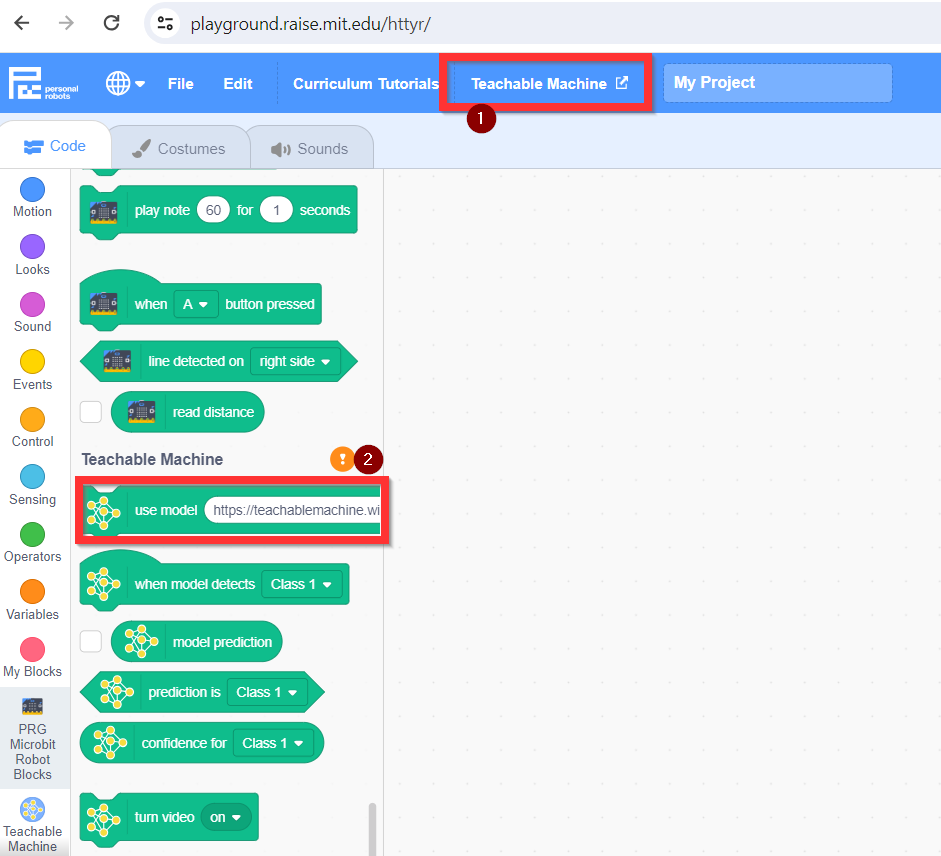
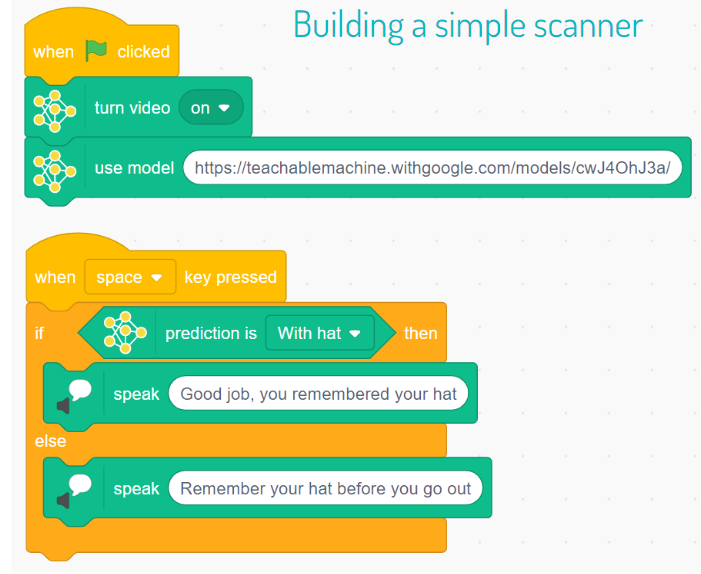
Playground, Teachable Machine Google y Microbit
Playground es como Scratch pero puedes utilizar las Teachable Machines de Google en tu programación
Entramos en https://playground.raise.mit.edu/httyr/
Y podemos usar una máquina educable de Google en (1) y luego utilizarlo en (2)
Podemos conectar nuestro robot MICROBIT CUTEBOT
Este vídeo por ejemplo nos enseña cómo utilizar una máquina que reconozca que tocamos la cara o no
O reconocer textos
Por ejemplo este programa muestra si tienes puesto un sombrero o no
Ulrich Pedersen Dah & Ture Reimer-Mattesen Center for Underisningsmidler CPU
7. IA Hardware educable
SmartCamera - Qué es
Esta cámara se vende como accesorio de los robots de Makeblock por unos 140€ ,

ATENCIÓN, ESTE SENSOR NO SE SUMINISTRA CON EL KIT DE PRÉSTAMO DE CATEDU
Atención ESTA ESPECIALMENTE DISEÑADO PARA mBot1, no esta muy bien ajustado para mBot2
Por dentro es un PIXCAM https://pixycam.com/ que tiene integrado un firmware que puede trabajar de dos formas :
- Modo reconocer colores.
- Reconoce con IA hasta 7 colores distintos
- Salida I2C que facilita las coordenadas X e Y con respecto a un punto determinado (suele ser el centro) y por lo tanto servos o motores pueden realizar el seguimiento de color reconocido.
- Modo seguimiento de líneas/barras
- Reconocimiento de líneas
- Con IA toma decisiones de rumbo en las intersecciones
- Modo lectura códigos de barras Reconoce 15 códigos de barras verticales definidos de fábrica
Se ve mejor con un video:
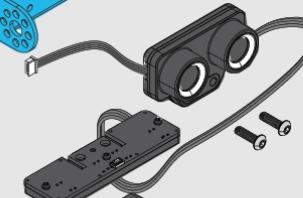
El kit para Makeblock es la misma cámara pero encapsulado, y se añade
- batería
- cables de conexión para mbot1
- cable de conexión para mbo2
- pelotas de colores
- los códigos de barras que hemos comentado

NO ES LA ÚNICA:
HUSKYLENS
Se puede poner al robot Maqueen Plus de Microbit https://libros.catedu.es/books/microbit-car/page/cars-para-microbit

- Es barata aprox 55€
- Tiene más funciones, como reconocimiento facial
- Tiene una pantalla pequeña de 2 pulgadas OLED integrada para visualizar su funcionamiento.
- Su utilización es muy similar, entrar en el modo de operación que se desee (reconocimiento color, líneas, facial....) y dar al botón cuando es el objeto que se desea ver
- Necesita una placa complemento para la microbit (Robot Maqueen Plux o una tarjeta IO expansión...)
- Debido a su consumo 320mA necesitan una alimentación externa HAY QUE RECHAZAR TODA ALIMENTACIÓN CON LAS BATERÍAS 1860 QUE ESTEN ACCESIBLES ver peligros

- Hay que descartar las 18650 modelos https://www.dfrobot.com/search-maqueen%20plus.html
- Hay modelos con baterías AAA NiMh recargables aprox 105€
Ver ejemplo de uso :
Smart AI Lens kit ELECFREAKS
Ver ejemplos de uso Microbit+cutebot + AI LENS en https://libros.catedu.es/books/microbit-car/page/ai-lens-elecfreak
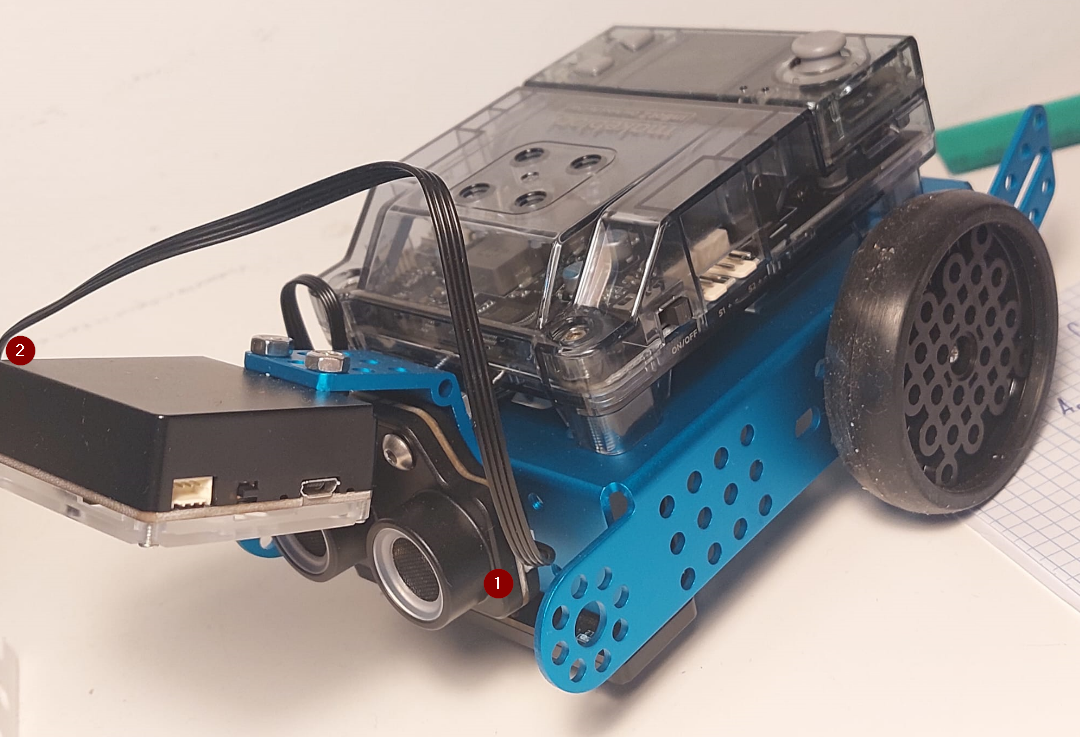
SmartCamera - conexión con mBot
Hardware
Para conectarlo con mBot1 hace falta la batería que se suministra en el pack, con su cable de conexión (punto 3 al 4 de la figura( y el cable de conexión del puerto I2C (punto 2) al RJ45 (punto 1).
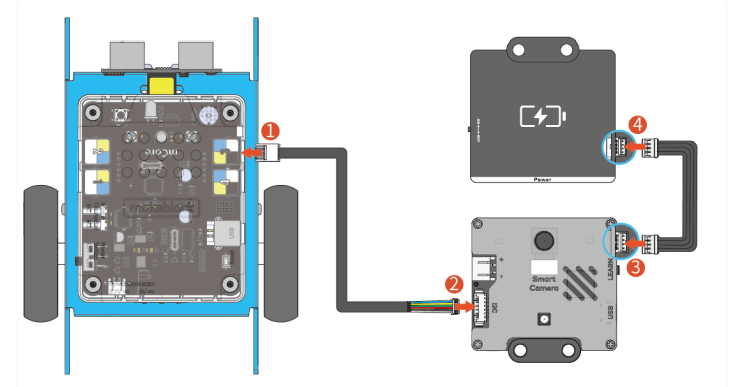
Extraído del Tutorial Smart Camera de Makeblock”, creada por Susana Oubiña Falcón,
Licencia CC-BY-NC https://juegosrobotica.es/smart-camera-makeblock/
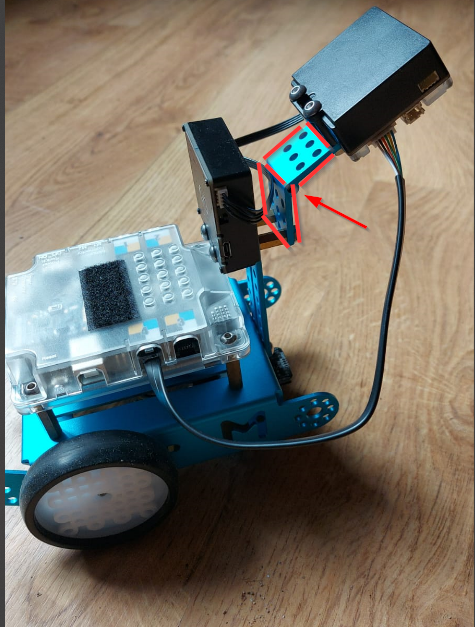
Una propuesta de montaje es este:
Extraído del Tutorial Smart Camera de Makeblock”, creada por Susana Oubiña Falcón, Licencia CC-BY-NC https://juegosrobotica.es/smart-camera-makeblock/
Otra podría ser esta, utilizando también la misma pieza para que SmartCam tenga más visión :
En mBot2
En este robot, no tenemos puertos con clavija RJ45 pero sí puertos I2C que permiten comunicación de los diferentes módulos de sensores y actuadores en serie, en la figura vemos como se conectan el sensor sigue líneas con el sensor distancia ultrasonidos en serie.
Podemos no perder el sensor a distancia de ultrasonidos y conectarlo desde este sensor (1) al smartcamera (2) con el cable I2C que se suministra en el pack de smart cámera.
Por supuesto puedes prescindir el sensor de distancia de ultrasonidos y conectarlo al sensor sigue líneas. O incluso directamente a la placa y prescindir también del sigue líneas.
Con mBot2 NO hace falta conectar la batería. Smart cámera ya se alimenta a través del cable I2C. Pero si se pone no pasa nada, internamente las masas están conectadas.
Software
En mBlock
Tenemos que ir a bloques e instalar la extensión SMART CAMERA

Smart camera - seguimiento color - sencillo
Configuración reconocimiento de color
Método por software (recomendado)
Una forma de configurar la cámara en este modo, es insertar estas instrucciones al inicio del programa
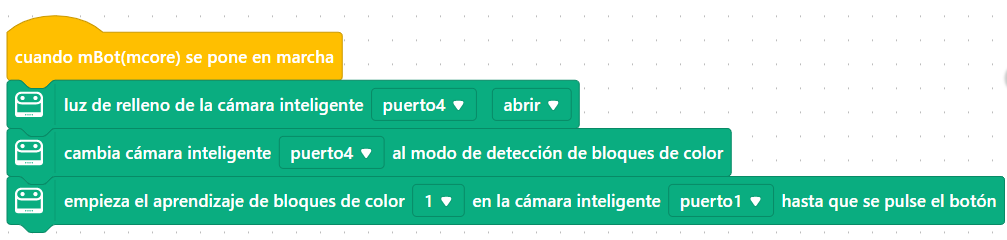
La explicación es :
- Encenderemos el led para ser un poco independientes de la luz ambiental, esto es optativo.
- Iniciar smart cámera en el modo de seguimiento de color
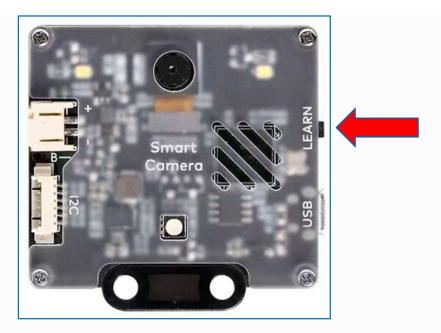
- Luego le diremos a la cámara que aprenda el color. Para ello ponemos la pelota que queramos ENFRENTE DE LA CÁMARA, LO MOVEREMOS SUAVMENTE HASTA QUE EL LED TENGA EL MISMO COLOR QUE LA PELOTA. En ese momento pulsamos el botón LEARN.
Extraído del Tutorial Smart Camera de Makeblock”, creada por Susana Oubiña Falcón,
Licencia CC-BY-NC https://juegosrobotica.es/smart-camera-makeblock/
Se ve mejor con un vídeo
Método por hardware
Otro método es:
- pulsar en el botón de LEARN Y NO SOLTARLO
- el led empieza a parpadear en diferentes clores
- el led pregunta qué color quieres que aprenda, el código es el siguiente

Extraído del Tutorial Smart Camera de Makeblock”, creada por Susana Oubiña Falcón,
Licencia CC-BY-NC https://juegosrobotica.es/smart-camera-makeblock/
- Ojo: NO SIGNIFICA QUE HAY QUE PONER ESOS COLORES es decir, si el led está en rojo, no significa que tienes que poner una pelota roja, sino que pregunta por el color 1
- Cuando está en el color que deseas (por ejemplo, queremos grabar el color número 1, entonces esperamos a que el led se ponga rojo) entonces en ese momento LO SOLTAMOS
- Ahora igual que antes:
- Ponemos la pelota del color que deseamos que aprenda, y cuando coincide hacemos una pulsación corta en LEARN
Programa en mBlock
El programa es sencillo
- Si el color se detecta arriba, avanza
- Si el color se detecta abajo, retrocede
- Si el color se detecta a la izquierda, gira a la izquierda
- Si el color se detecta a la derecha, gira a la derecha
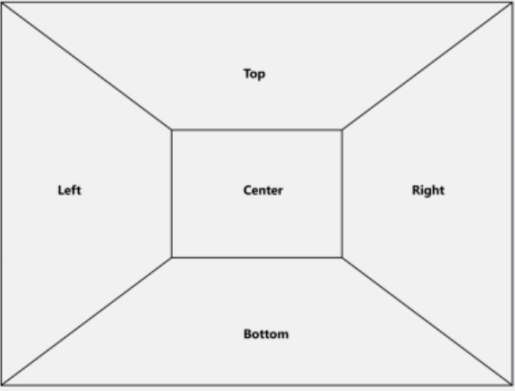
Extraído del Tutorial Smart Camera de Makeblock”, creada por Susana Oubiña Falcón,
Licencia CC-BY-NC https://juegosrobotica.es/smart-camera-makeblock/
Lo añadimos en un bucle junto con el script anterior de configuración de la cámara, y se añaden unos avisadores de led para saber en qué estado está la cámara
El programa lo tienes aquí https://planet.mblock.cc/project/3664760
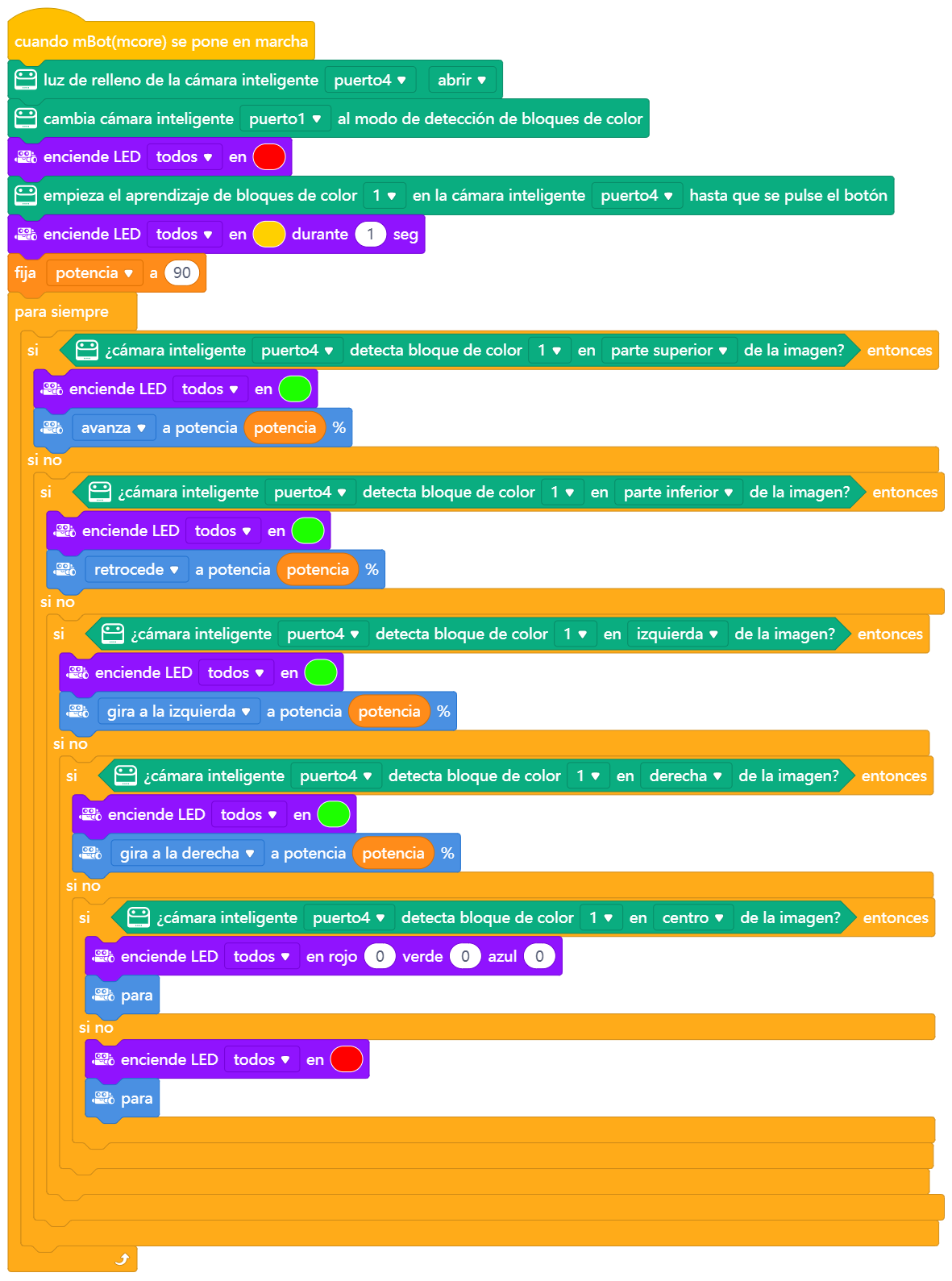
Si no quieres poner lo accesorio https://planet.mblock.cc/project/3719420
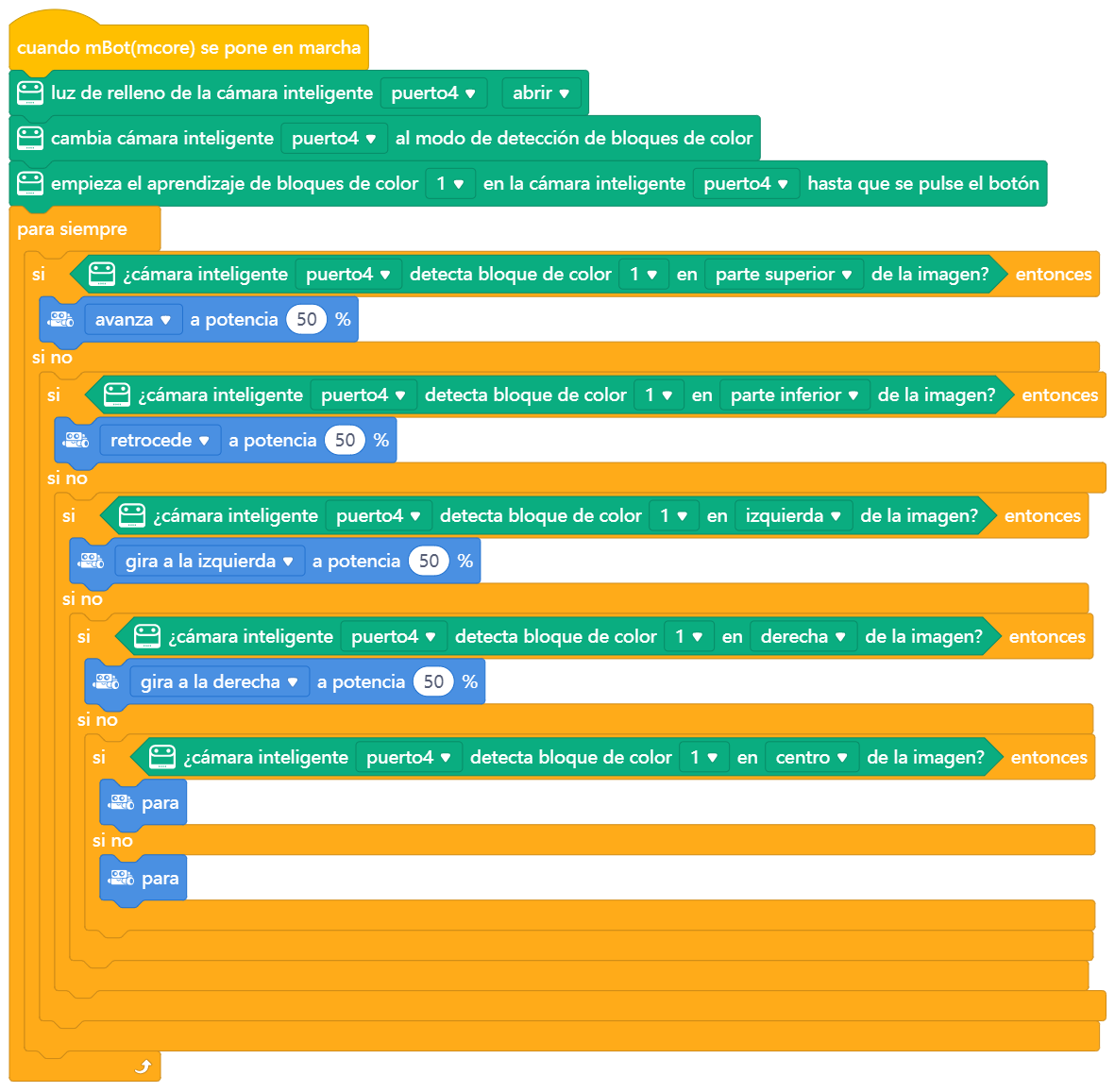
Aclárate ¿Qué potencia le doy? 50% o 90%?
R: Pues el que quieras, cuanto menos potencia, lo sigue mejor, pero si la bola va deprisa, lo "pierde"
Si la das más potencia, no lo sigue tan bién, hay a veces "oscilaciones" que no se estabilizan. Ver este vídeo
Smart camera seguimiento color avanzado
Kp, velocidad diferencial del motor.... ¿Eso qué es?
En la extensión CAMARA INTELIGENTE ESPECÍFICA PARA EVENTOS
Encontramos estas dos instrucciones
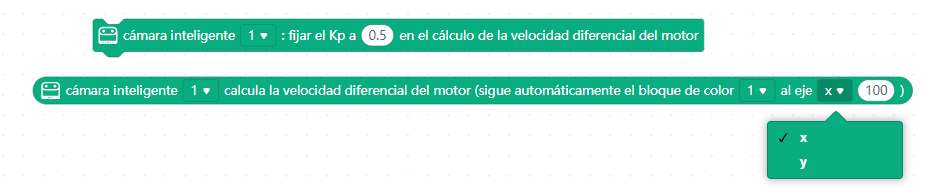
¿Qué significan?
Vamos a definir dos sistemas de coordenadas
- Las coordenadas del fondo de PixiCam
- Las coordenadas de la SmartCam asociadas al evento (en este caso el seguimiento del color) que en la instrucción se llama velocidad diferencial (no puedo llamarlo velocidad pues son coordenadas espaciales, como físico lo siento, no puedo 😫)
Las coordenadas de fondo de Pixicam son fijas, y van desde 0,0 a 320,240 y se pueden ver en la pantalla de PixiMon moviendo el ratón:
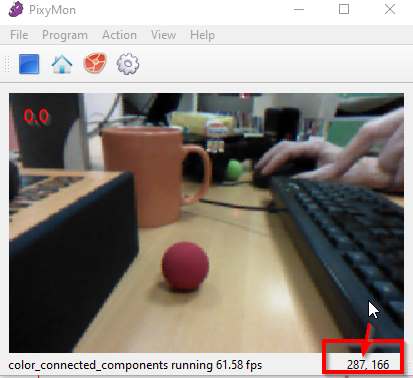
Las otras coordenadas "Las coordenadas de la SmartCam asociadas al evento" están asociadas al evento y están escalados según el valor de 100*Kp donde Kp tiene que ser un número de 0 a 1 por lo tanto el máximo es 100 y el centro de coordenadas lo fija el usuario en el número de la siguiente instrucción, ese número está referido a las coordenadas del fondo de Pixicam

Para entendernos mejor, si ponemos

El origen será 160,120, o sea lo normal, el centro del fondo de Pixicam, pero puede interesarte "acercar" la bola al robot por lo tanto ¿subirías y a más de 120 o bajarías de 120?
Para entenderlo mejor un dibujo,:
- Las coordenadas del fondo de PixiCam en rojo
- Las coordenadas de la SmartCam asociadas al evento en azul
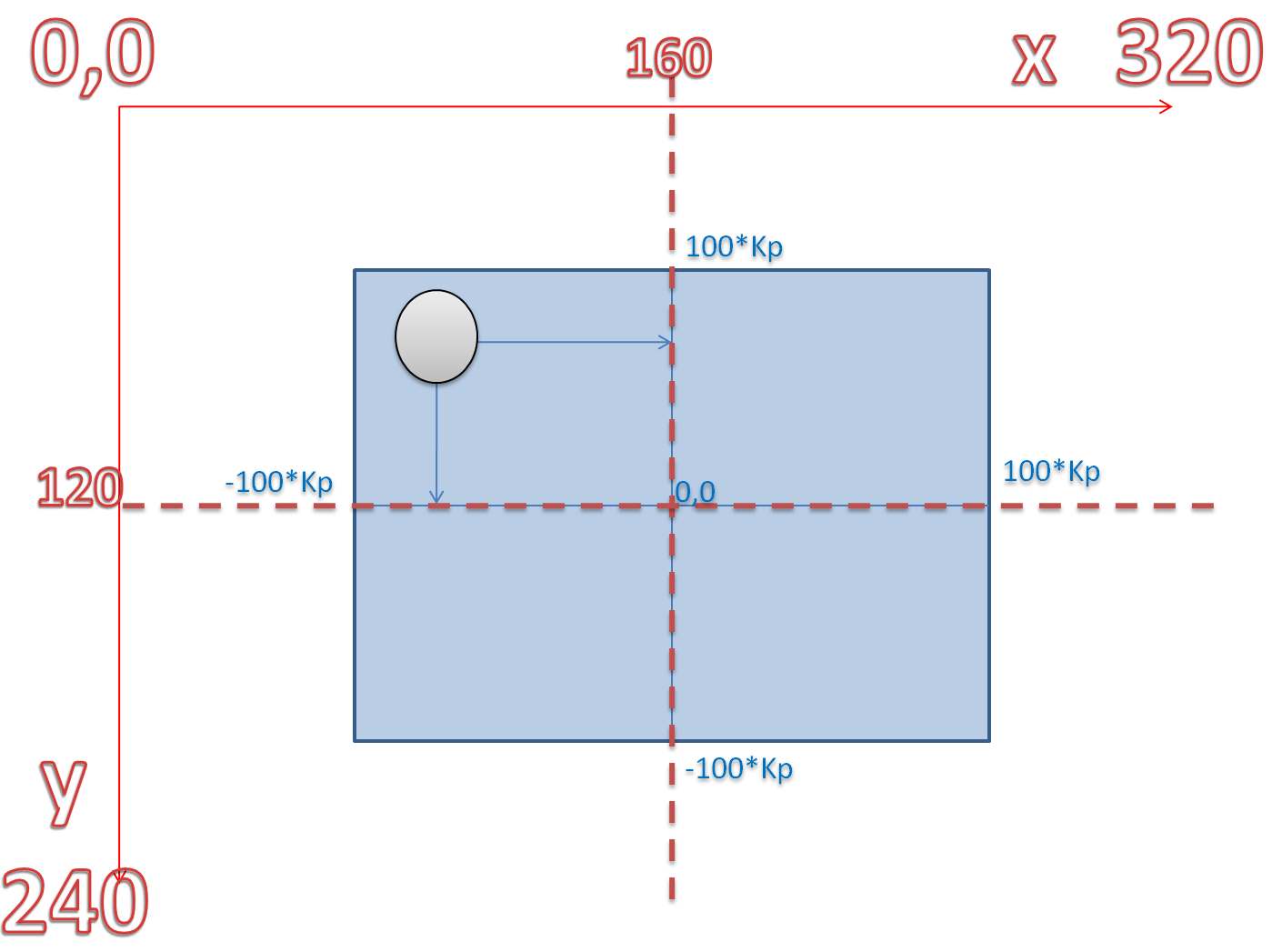
Y para entenderlo mejor, vamos a ejecutar el siguiente programa test en mBot2 para que se vea en la pantalla del Cyberpi https://planet.mblock.cc/project/3657404
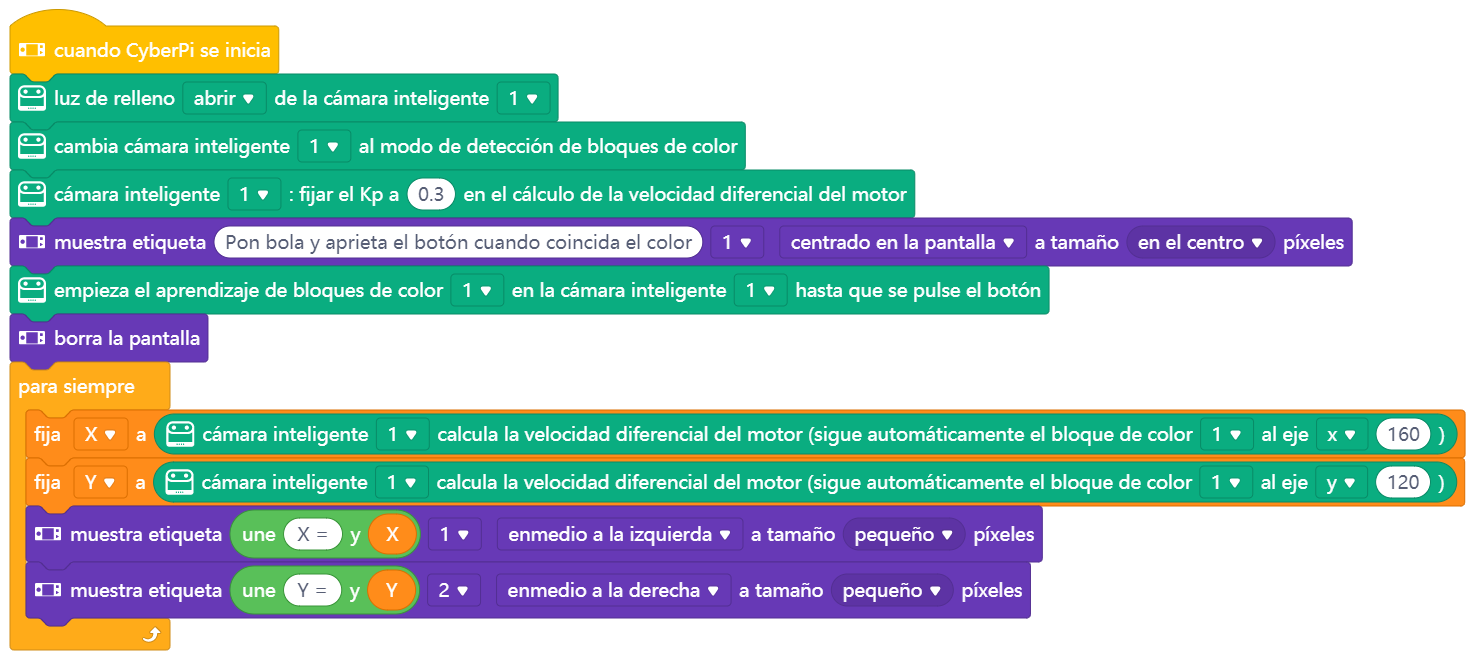
Al ejecutarlo vemos que muestra las coordenadas de la pelota roja (asociada al evento) y como Kp es 0.3 va desde -30 a +30 tanto para X como para Y
Kp, velocidad diferencial del motor.... ¿Eso para qué sirve?
Pues como son las coordenadas de lo que se "separa" la bola de tu origen, puedes darle velocidad a los motores según esas coordenadas
Desde el punto de vista de las Y (avanzar o retroceder) si hay más Y más tienen que ir los dos motores (hacia delante) si la Y es negativa los dos motores tienen que retroceder, luego desde el punto de vista de las Y :
- Velocidad motor izquierdo = Y
- Velocidad motor derecho = Y
Desde el punto de vista de las X (girar) si la X es positiva, tiene que girar a la derecha por lo tanto motor izquierdo avanzar (positiva) y el derecho retroceder (negativo) y si es negativo al revés por lo tanto
- Velocidad motor izquierdo = X
- Velocidad motor derecho = -X
Juntando los dos, tenemos:
- Velocidad motor izquierdo = Y + X
- Velocidad motor derecho = Y - X
Seguimiento del color utilizando Kp, velocidad diferencial
Podemos aumentar en un factor de 3 para darle más caña pues el máximo sería 30% al multiplicarlo por 3 conseguimos llegar al 90%. Ese factor de multiplicación de la potencia del motor tendría que ser más o menos 10*Kp
Es decir, Velocidad motor izquierdo = 10 Kp ( Y + X ) Velocidad motor derecho = 10 Kp (Y - X)
Cuánto más Kp, se sigue mejor a la pelota pero se consigue peor estabilización.
El programa https://planet.mblock.cc/project/3613286

¿Por qué el seguimiento del color utilizando Kp, velocidad diferencial es mejor que el simple?
Piénsalo bien, cuanto más se aleja, más potencia, mientras que el simple, si la pelota estaba en una zona determinada, va a una potencia fija.
+ Información
En estos PDFs tienes una explicación más formal de Kp y las velocidades diferenciales:
- En Inglés https://www.a4telechargement.fr/mBot/MB-P1100022_SmartCamera_StudentsBookSmartCamera_ANG.pdf
- En Español https://juegosrobotica.es/descargas/Tutorial-Smart-Camera-de-Makeblock.pdf
Smart camera Piximon
INSTALACIÓN DE PYXMON V2
No es un software obligatorio, pero viene muy bien qué está pasando y qué esta viendo la cámara. Además nos permite opciones avanzadas y configurar con más detalle sus posibilidades.
El software está en la página de https://pixycam.com/
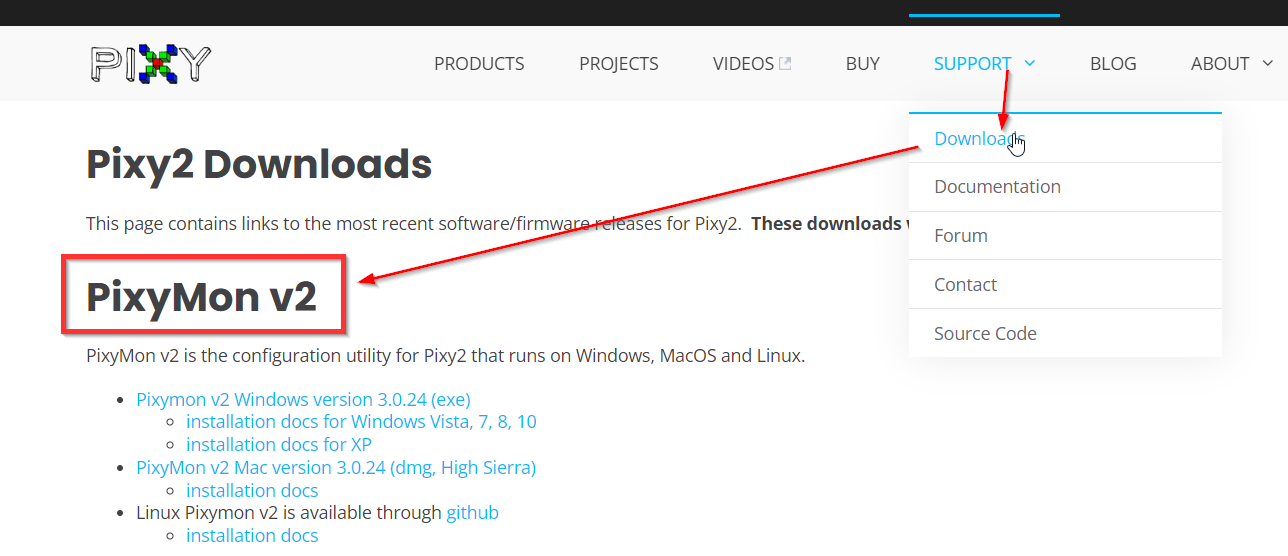
ATENCIÓN NO CONECTAR LA CAMARA CON EL CABLE USB ANTES DE LA INSTALACIÓN DE PIXIMON
Pues Windows instalará unos drivers erróneos o dejará marcado como desconocido la cámara. Instalaremos PixyMon v2 y después conectaremos el cable USB del ordenador a l a cámara.
En el caso de que hayamos metido la pata, ir a Windows-Administrador de dispositivos, quitar a cámara, instalar PixyMon y conectar la cámara.
PARA QUE NOS SIRVE PIXIMON: PARA SABER QUÉ OCURRE EN LA DETECCIÓN DE COLOR
Si algo falla, podemos conectar la Smart Camera al ordenador y Piximon nos enseña qué ve y cómo lo hace, por ejemplo el siguiente vídeo se ve que está en modo de detección de color, y vemos que ha detectado el verde
Conecta el cable USB a la cámara
Más información
- En inglés https://docs.pixycam.com/wiki/doku.php?id=wiki:v2:pixymon_index
- En español https://juegosrobotica.es/descargas/Tutorial-Smart-Camera-de-Makeblock.pdf
PARA QUE NOS SIRVE PIXIMON: CONFIGURAR EL SIGUE-LINEAS
Podemos entrar en configuración y determinar el grosor de la línea, brillo, contraste...
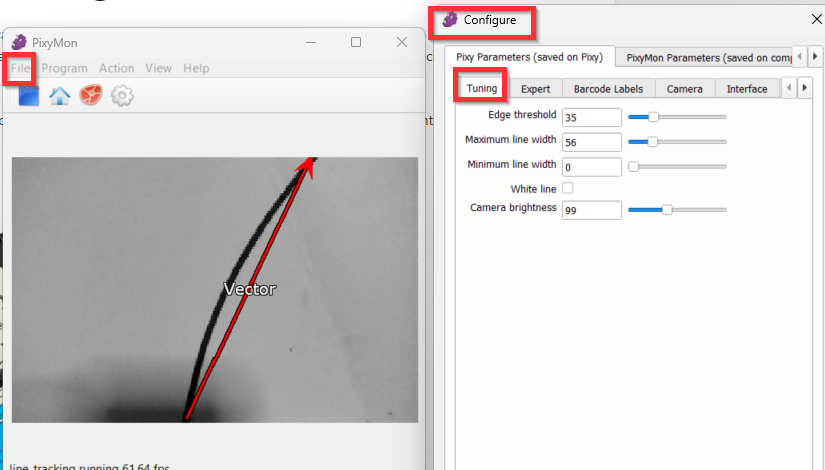
Para más información de la configuración del sigue líneas
- En inglés https://docs.pixycam.com/wiki/doku.php?id=wiki:v2:line_pixymon
- En español https://juegosrobotica.es/descargas/Tutorial-Smart-Camera-de-Makeblock.pdf
Smart Camera Código de barras
En el modo de detección de código de barras, puede detectar 15 códigos de barras ya definidas.

Las puedes descargar aquí https://drive.google.com/file/d/1K28cD6o5csGg1_h7cnmsZ5Box02NTdUC/view?usp=sharing

Extraído del Tutorial Smart Camera de Makeblock”, creada por Susana Oubiña Falcón,
Licencia CC-BY-NC https://juegosrobotica.es/smart-camera-makeblock/
Y las tiene que detectar en la posición correcta, excepto la 15 que es simétrica, el resto no son invariantes bajo rotación
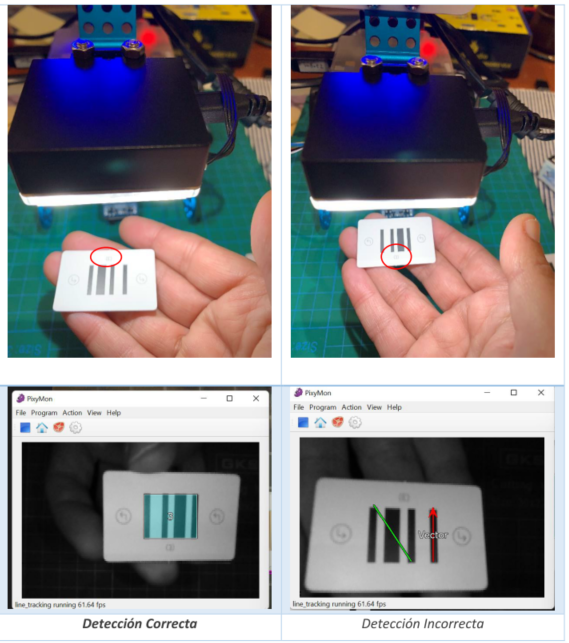
Extraído del Tutorial Smart Camera de Makeblock”, creada por Susana Oubiña Falcón,
Licencia CC-BY-NC https://juegosrobotica.es/smart-camera-makeblock/
En mBlock las detecta desde el número 1 al 15. Pero observa que del 1 al 9 tiene ya unos nombres predefinidos
Esto no quiere decir que estés obligado a ejecutar la acción acorde al nombre de la etiqueta, puedes elegir perfectamente que si detecta la etiqueta 5(parar) que haga girar
Si quieres cambiar de nombres, dentro del software Piximon puedes renombrar estas etiquetas en Configure-Barcode labels
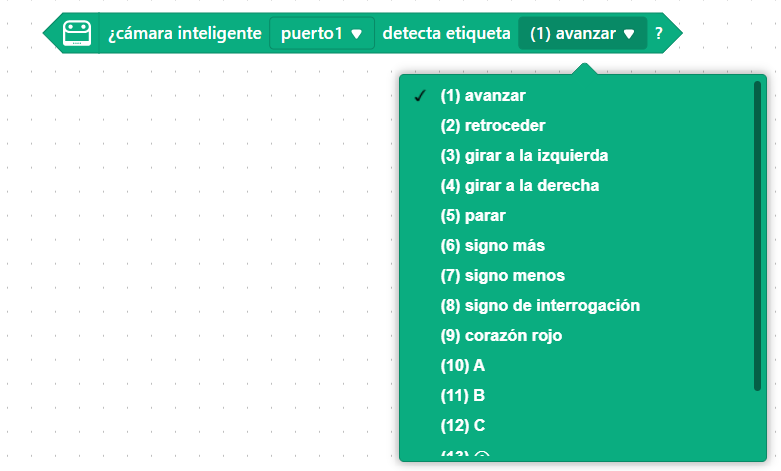
Un programa ejemplo sería
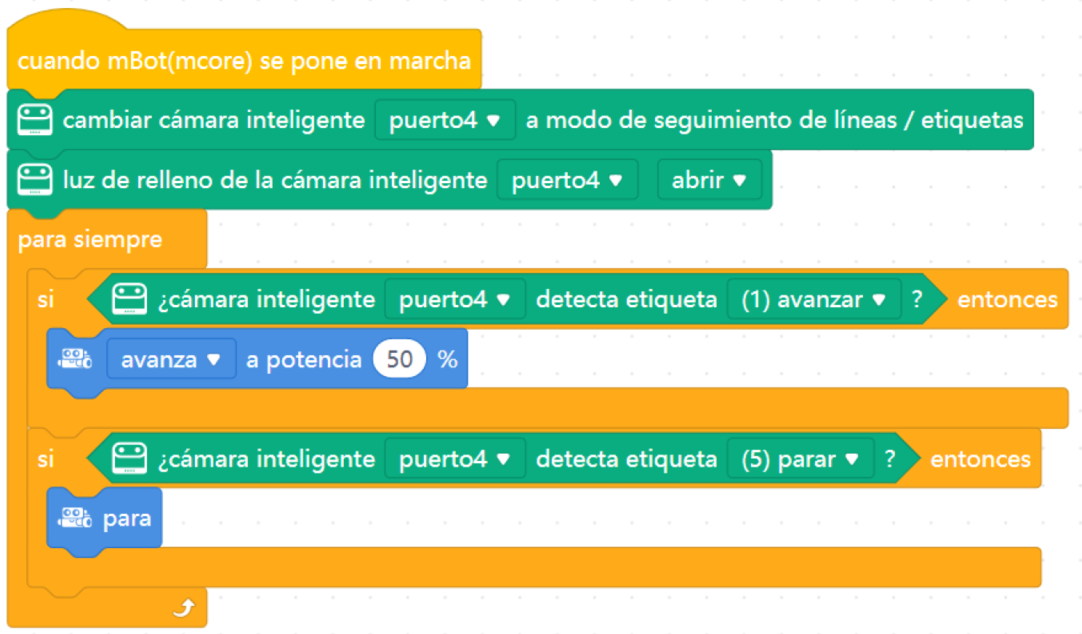
Extraído del Tutorial Smart Camera de Makeblock”, creada por Susana Oubiña Falcón,
Licencia CC-BY-NC https://juegosrobotica.es/smart-camera-makeblock/
También puede detectar dada una posición, por ejemplo este programa
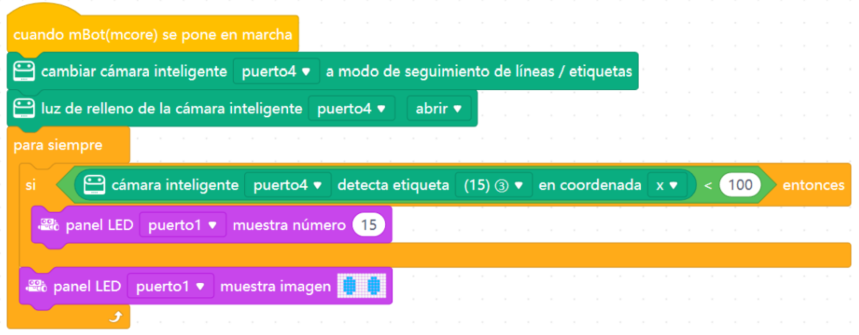
Extraído del Tutorial Smart Camera de Makeblock”, creada por Susana Oubiña Falcón,
Licencia CC-BY-NC https://juegosrobotica.es/smart-camera-makeblock/
Proyectos con Cyberpi
Caja registradora
El programa lo tenemos en este tutorial (hay que registrarse para verlo)
Color traductor. Aquí el tutorial (hay que registrarse)
SmartCamera - sigue líneas
mBot ya tiene un sigue-lineas https://libros.catedu.es/books/robotica-educativa-con-mbot/page/siguelineas pero no trabaja la inteligencia artificial. Es un sensor que nos detecta el brillo del suelo y sobre esa respuesta programamos la potencia de los motores para que sigan la línea.
Pero en este caso será la cámara la que detectará la línea y tomará la decisión de qué rumbo tomar, para ello montaremos la cámara con una visión horizontal utilizando la pieza de ángulo recto:
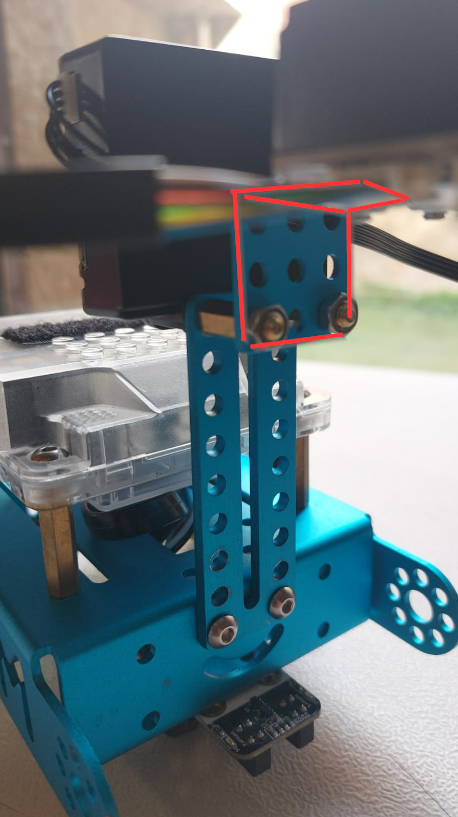
Y conectaremos la batería con la SmartCam y el puerto I2C con el Puerto 4 por ejemplo.
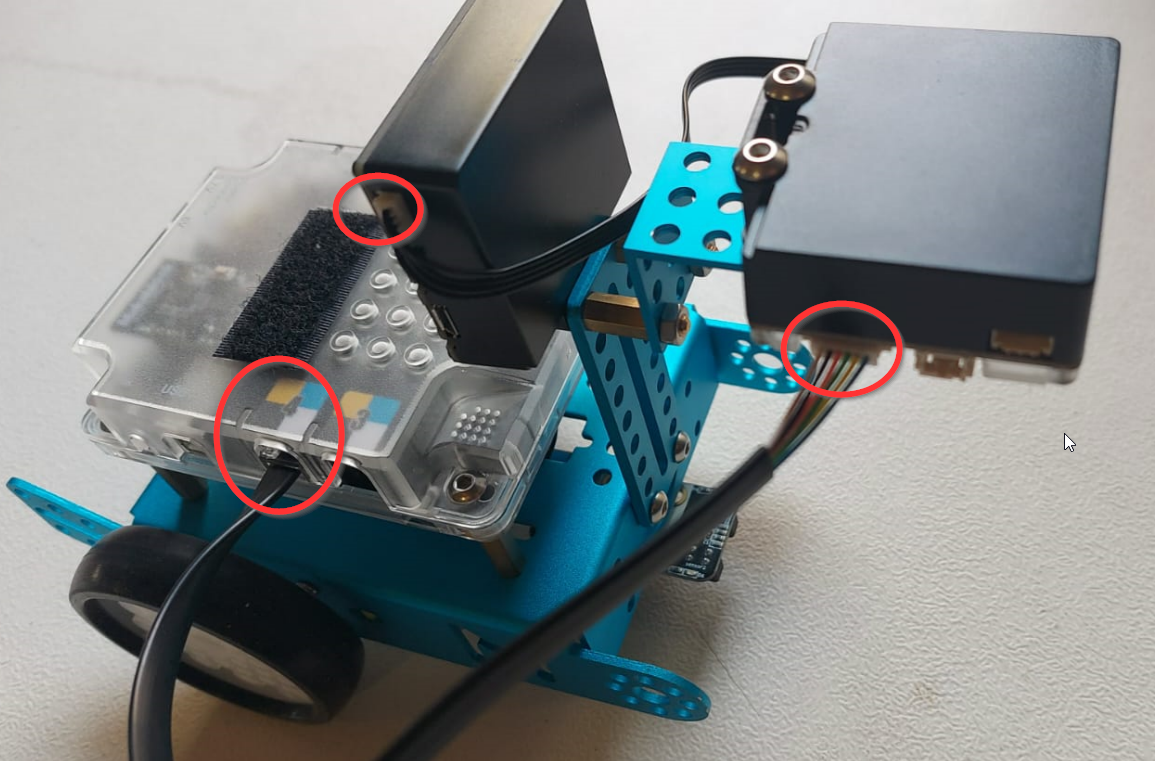
En este modo, la SmartCam reconoce las líneas que ve, y con el programa Piximon las marca con diferentes colores y decide de forma óptima el camino a seguir. El color rojo marca la decisión
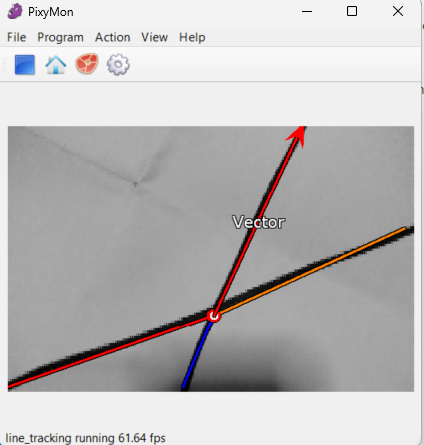
Si el fondo,, contraste o grosor de las líneas no es el adecuado, con el programa PixiMon podemos cambiar la configuración para que lo detecte correctamente:
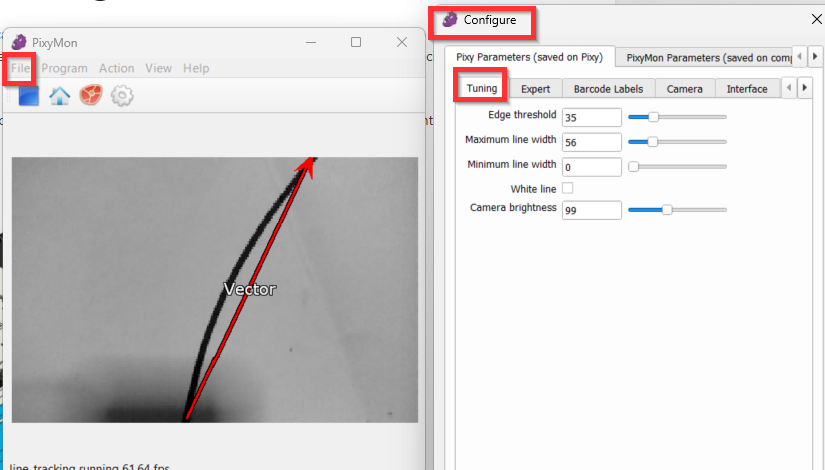
Si cargamos el programa siguiente https://planet.mblock.cc/project/3715899

El resultado es :
Explicado paso a paso
La decisión en una intersección con programación
Si queremos que no decida automáticamente, sino que por ejemplo el ángulo del cruce es menor de 45 que gire a la derecha, el código sería
https://planet.mblock.cc/project/3716895

También podríamos hacer la decisión en función si el cruce está más a la derecha o más a la izquierda, recuerda que las coordenadas x van desde el extremo izquierdo 0 al extremo derecho 320. Una opción sería :
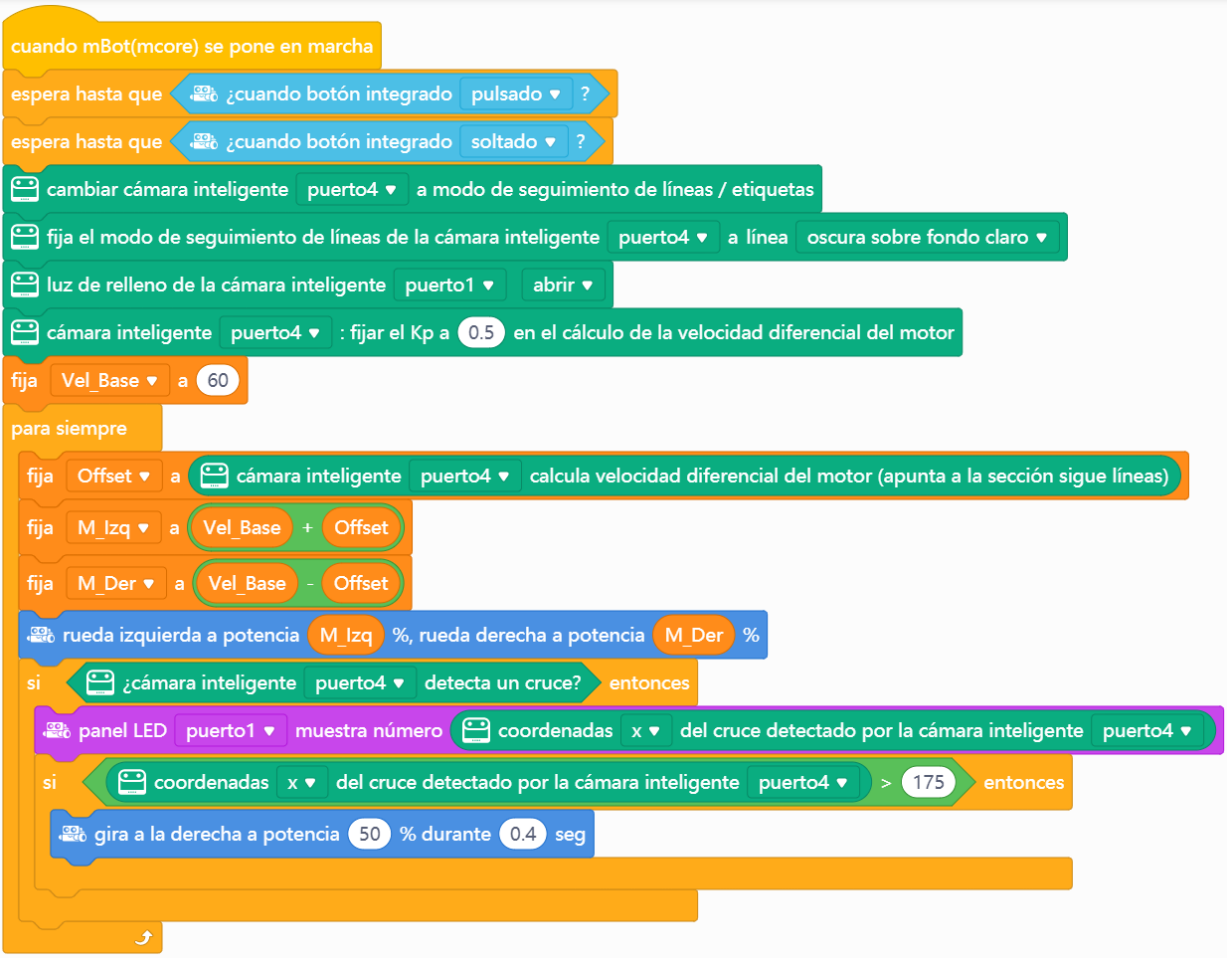
Extraído del Tutorial Smart Camera de Makeblock”, creada por Susana Oubiña Falcón,
Licencia CC-BY-NC https://juegosrobotica.es/smart-camera-makeblock/
La decisión de una intersección por código de barras
El modo sigue-lineas es también modo de etiquetas :

Esto nos permite que podemos utilizar las etiquetas para las decisiones de las intersecciones

Extraído del Tutorial Smart Camera de Makeblock”, creada por Susana Oubiña Falcón,
Licencia CC-BY-NC https://juegosrobotica.es/smart-camera-makeblock/

Extraído de https://arduiblog.com/2022/05/01/smart-camera-de-makeblock/ autor JCQuetin, licencia BY-NC-SA 3.0
Creditos
- 2017 Capítulos 1,2 y 3 con mBlock4 por Javier Quintana CATEDU
- 2023 Actualizado a mBlock 5 por Javier Quintana CATEDU
- 2024 Capítulo 4, 5, 6 Inteligencia Artificial por Javier Quintana CATEDU
Cualquier observación o detección de error en soporte.catedu.es
Los contenidos se distribuyen bajo licencia Creative Commons tipo BY-NC-SA excepto en los párrafos que se indique lo contrario.


