EN VIVO ¿Eso qué es?
DOS FORMAS DE PROGRAMAR EN MBLOCK :
OPCIÓN Programación en vivo
El programa reside en el ordenador, y en la placa hay instalado un Firmware para ir escuchando y ejecutando lo que manda el ordenador.
- VENTAJAS
- Te permite interactuar el robot y el ordenador, por ejemplo podemos hacer que cuando el detector de humedad detecte agua, que salga por pantalla un fondo acuático, o que pulsando una tecla del teclado se encienda un LED en la placa...
- DESVENTAJAS
- hay que cargar dentro del robot el Firmware exclusivo de mBlock para que Arduino haga caso a mBlock
- Hay que tener nuestro ordenador como intermediario, se come los recursos y puede que nuestro programa vaya lento
- Por supuesto necesita tener ordenador conectado al robot, o sea, trabaja como un esclavo del ordenador.
OPCIÓN Programación cargar a la placa
Todos los programas editores de Arduino (tanto los que programan con código como el Arduino IDE) como los editores de programas gráficos en bloque (mBlock, Snap4Arduino, Arduinoblocks, ...) permiten cargar el programa en la placa. Las ventajas y desventajas son las opuestas de trabajar en vivo.
EN VIVO ¿Qué es eso?
Existe una posibilidad de utilizar la placa "en vivo" frente a "cargar" el programa en la placa.
Es decir, interactuando con el ordenador. El programa está en el PC. En la placa hay un firmware que le dice que este a las órdenes del PC. De esta manera podemos por ejemplo:
- Enviar órdenes desde el ordenador a la placa.
Por ejemplo que al pulsar la tecla espacio que se encienda el led D13
- Enviar información desde la placa al ordenador
Por ejemplo que muestre por pantalla nos muestre la cantidad de luz, que registra el sensor LDR, etc...
Que nosotros sepamos, estos programas permiten la programación en vivo :
- mBlock placas: Arduino, Microbit, Raspberry Pi, ... robots de Makeblock: mBot, Cyberpi...
-EchidnaScratch CURSO DE ECHIDNA
VENTAJAS LA PROGRAMACIÓN EN VIVO PERMITE MUCHO JUEGO Y POSIBILIDADES A LA HORA DE ELABORAR PROYECTOS
INCONVENIENTES: Necesitas el ordenador encendido y conectado al robot.
¿Qué hace mBot EN VIVO dependiendo del ordenador?
En el modo EN VIVO, mBot obedece a un programa interno (Firmware) que es el que hemos puesto al ACTUALIZAR EL FIRMWARE
Este Firmware lo que le ordena a la placa Arduino es:
- Haz caso a las instrucciones del mando de IR ver figura de abajo
- Haz caso a la conexión con el ordenador y a las instrucciones que vengan por ahí
Esto tiene su importancia:
-
El punto 1 te dice que no puedes hacer un programa con el Mando IR pues prevalece el del Firmware, por lo tanto no se puede utilizar en tu programación el mando IR en el modo "dependiendo del ordenador" pero sí en el modo "independiente del ordenador".
-
El punto 2 te dice que tus programas se ejecutan en el ordenador y se lo comunica al robot luego:
-
Si desconectamos el ordenador o la conexión, dejan de funcionar, o mejor dicho se mBot se queda atascado en la última instrucción ejecutada.
- Tus programas van un poco lentos, pues dependen del ordenador. El mismo programa lo pasas al modo "independiente del ordenador" y va mucho más rápido.
Instrucciones del mando IR en el firmware que viene por defecto (modo dependiendo del ordenador):
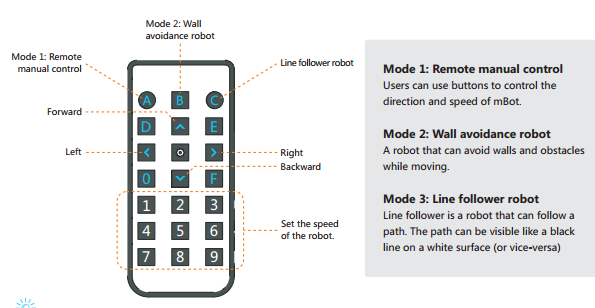
Fuente de las imágenes: http://makeblock.es/
AL ACTUALIZAR EL FIRMWARE ESTAS DICIENDO AL MBOT QUE TRABAJE EN VIVO
No Comments