# SmartCamera - conexión con mBot
### **Hardware**
Para conectarlo con mBot1 **hace falta la batería** que se suministra en el pack, con su cable de conexión (punto 3 al 4 de la figura( y el cable de conexión del puerto I2C (punto 2) al RJ45 (punto 1).
[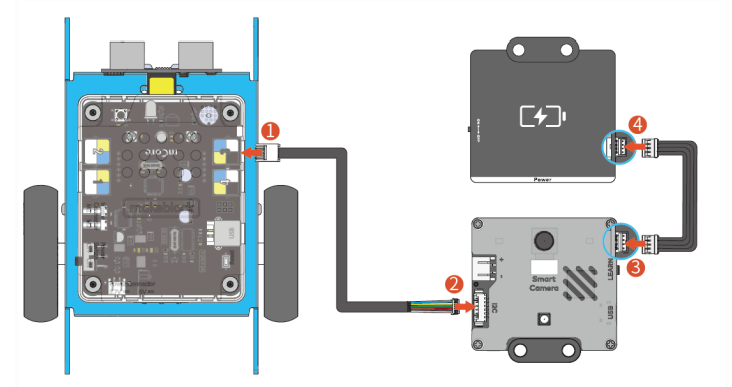](https://libros.catedu.es/uploads/images/gallery/2024-03/smartcamera2.png)
*Extraído del Tutorial Smart Camera de Makeblock”, creada por Susana Oubiña Falcón,
Licencia CC-BY-NC [https://juegosrobotica.es/smart-camera-makeblock/](https://juegosrobotica.es/smart-camera-makeblock/)*
Una propuesta de montaje es este:
[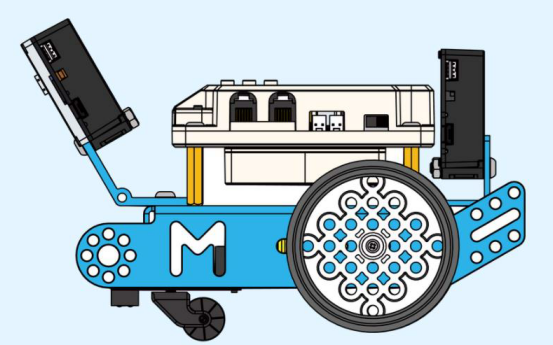](https://libros.catedu.es/uploads/images/gallery/2024-03/smartcamera3.png)
*Extraído del Tutorial Smart Camera de Makeblock”, creada por Susana Oubiña Falcón, Licencia CC-BY-NC [https://juegosrobotica.es/smart-camera-makeblock/](https://juegosrobotica.es/smart-camera-makeblock/)*
Otra podría ser esta, utilizando también la misma pieza para que SmartCam tenga más visión :
[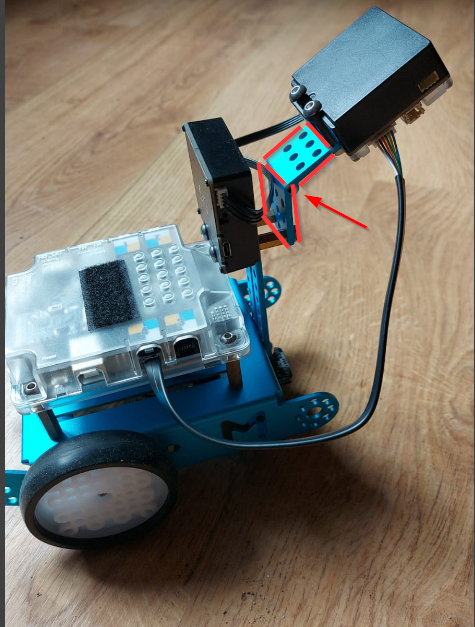](https://libros.catedu.es/uploads/images/gallery/2024-04/2024-04-01-12-46-55-whatsapp.png)
##### **En mBot2**
En este robot, no tenemos puertos con clavija RJ45 pero sí puertos I2C que permiten comunicación de los diferentes módulos de sensores y actuadores en serie, en la figura vemos como se conectan el sensor sigue líneas con el sensor distancia ultrasonidos en serie.
[](https://libros.catedu.es/uploads/images/gallery/2024-03/smartcamera7.png)
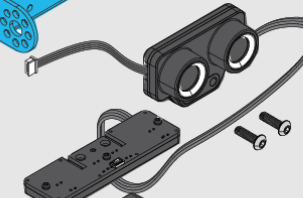
Podemos no perder el sensor a distancia de ultrasonidos y conectarlo desde este sensor (1) al smartcamera (2) con el cable I2C que se suministra en el pack de smart cámera.
[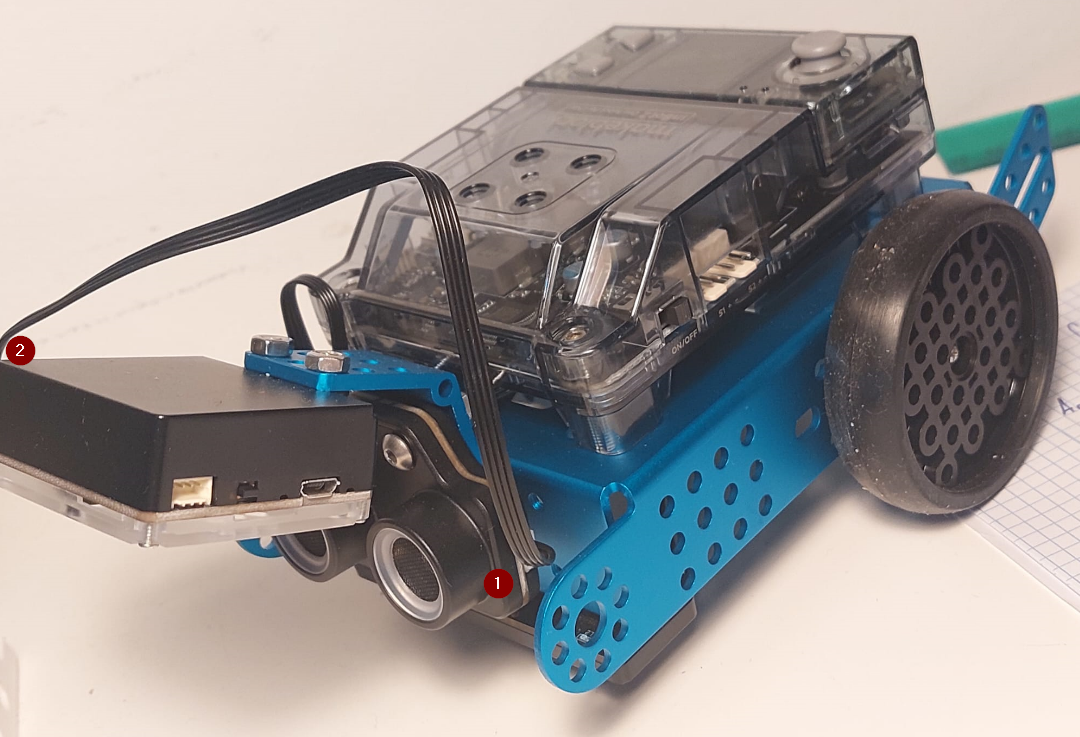](https://libros.catedu.es/uploads/images/gallery/2024-03/smartcamera6.png)
Por supuesto puedes prescindir el sensor de distancia de ultrasonidos y conectarlo al sensor sigue líneas. O incluso directamente a la placa y prescindir también del sigue líneas.
Con mBot2 **NO hace falta conectar la batería.** Smart cámera ya se alimenta a través del cable I2C. Pero si se pone no pasa nada, internamente las masas están conectadas.
## **Software**
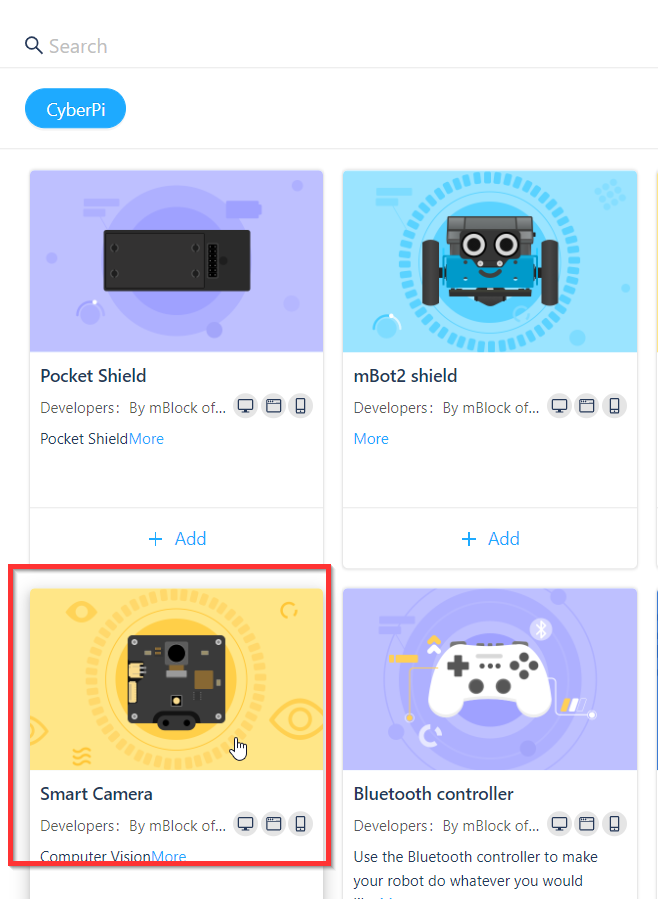
##### **En mBlock**
Tenemos que ir a bloques e instalar la **extensión SMART CAMERA**
**[](https://libros.catedu.es/uploads/images/gallery/2024-03/smartcamera8.png)**