Movimiento
- 2 Movimiento
- 2.1 Motores
- 2.2 Fichero VARIABLES.py
- 2.3 Libreria MOVIMIENTOS.py
- 2.4 Baile
- 2.5 Movimientos con tecla
2 Movimiento
El primer contacto con este robot va a ser controlar el movimiento.
Nomenclatura: Hacia delante es donde está la cámara.

2.1 Motores
Vamos a empezar por la parte importante de un rover:

Los motores estan gobernados con los siguientes GPIO
| Interfaces | Puertos GPIO de la Raspberry Pi |
|---|---|
| IN1 | P12 |
| IN2 | P13 |
| ENA | P6 |
| IN3 | P20 |
| IN4 | P21 |
| ENB | P26 |
Luego una de las primeras líneas que hay que poner en nuestros programas es traducir esos números a letras para que sea más facil utilizarlos en el código, y definir esos pines como pines de salida que van a gobernar a los motores:
import RPi.GPIO as GPIO
IN1=12;IN2=13;ENA=6;IN3=20;IN4=21;ENB=26
GPIO.setmode(GPIO.BCM);GPIO.setwarnings(False)
GPIO.setup(IN1,GPIO.OUT);GPIO.setup(IN2,GPIO.OUT);GPIO.setup(IN3,GPIO.OUT);GPIO.setup(IN4,GPIO.OUT)
GPIO.setup(ENA,GPIO.OUT);GPIO.setup(ENB,GPIO.OUT)¿Qué significan IN1 IN2 IN3 IN4 ?
| IN1 | IN2 | IN3 | IN4 | Descripción |
|---|---|---|---|---|
| 1 | 0 | 0 | 1 | Motores hacia delante |
| 0 | 1 | 1 | 0 | Motores hacia atrás |
| 0 | 0 | 0 | 1 | Giro derecha |
| 1 | 0 | 0 | 0 | Giro izquierda |
| 0 | 0 | 0 | 0 | Stop |
¿Y qué significa ENA ENB?
ENA y ENB es la velocidad de los motores A y B respectivamente.
Su valor tiene que ser analógico pero los GPIO son digitales, así que tienen que ser señales PWM.
Si vamos a poner una frecuencia de 500Hz y una velocidad media, el código que tenemos que poner al principio de nuestro programa es:
PWMA = GPIO.PWM(ENA,500);PWMB = GPIO.PWM(ENB,500)
PWMA.start(50);PWMB.start(50)Bueno, pero ... ¿Cómo son las conexiones?
En el AlphaBot están conectados los pines IN1 IN2 IN3 IN4 ENA ENB en los pines de un chip L298P que hace de driver a los motores (nunca conectes un motor a un GPIO de la Raspberry ya lo sabes) 
Vale... ¿Y cómo se utiliza?
Podemos definir en nuestros programas unas funciones para simplificar código para utilizar los motores hacia delante, detrás y giros:
def FORDWARD():
GPIO.output(IN1,GPIO.HIGH);GPIO.output(IN2,GPIO.LOW);GPIO.output(IN3,GPIO.LOW);GPIO.output(IN4,GPIO.HIGH)
def BACKWARD():
GPIO.output(IN1,GPIO.LOW);GPIO.output(IN2,GPIO.HIGH);GPIO.output(IN3,GPIO.HIGH);GPIO.output(IN4,GPIO.LOW)
def LEFT():
GPIO.output(IN1,GPIO.LOW);GPIO.output(IN2,GPIO.LOW);GPIO.output(IN3,GPIO.LOW);GPIO.output(IN4,GPIO.HIGH)
def RIGHT():
GPIO.output(IN1,GPIO.HIGH);GPIO.output(IN2,GPIO.LOW);GPIO.output(IN3,GPIO.LOW);GPIO.output(IN4,GPIO.LOW)
def STOP():
GPIO.output(IN1,GPIO.LOW);GPIO.output(IN2,GPIO.LOW);GPIO.output(IN3,GPIO.LOW);GPIO.output(IN4,GPIO.LOW)2.2 Fichero VARIABLES.py
Debido a que vamos a utilizar varias variables que serán comunes a varias librerías que también vamos a crear, vamos a crear un fichero común a todos, de momento será este:
Cuando queramos incorporar estas variables pondremos esta instrucciónde Python from VARIABLES import *
import RPi.GPIO as GPIO
DataMotorR = 7
DataMotorL = 8
IN1=12
IN2=13
ENA=6
IN3=20
IN4=21
ENB=26
##############CONFIGURACION GPIO ENTRADAS SALIDAS ####
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
GPIO.setup(IN1,GPIO.OUT)
GPIO.setup(IN2,GPIO.OUT)
GPIO.setup(IN3,GPIO.OUT)
GPIO.setup(IN4,GPIO.OUT)
GPIO.setup(ENA,GPIO.OUT)
GPIO.setup(ENB,GPIO.OUT)
GPIO.setup(DataMotorR,GPIO.IN)
GPIO.setup(DataMotorL,GPIO.IN)
########################### VELOCIDAD DE LOS MOTORES
PWMA = GPIO.PWM(ENA,500)
PWMB = GPIO.PWM(ENB,500)2.3 Libreria MOVIMIENTOS.py
Para simplificar nuestros programas podemos hacer una librería propia.
Esta librería la vamos a llamar MOVIMIENTOS.py y su contenido sería lo visto en las páginas anteriores, añadiendo las variables definidas en VARIABLES.py:
import RPi.GPIO as GPIO
from VARIABLES import *
###########################FUNCIONES#######################
def FORDWARD(vel):
GPIO.output(IN1,GPIO.HIGH)
GPIO.output(IN2,GPIO.LOW)
GPIO.output(IN3,GPIO.LOW)
GPIO.output(IN4,GPIO.HIGH)
PWMA.start(vel)
PWMB.start(vel)
def BACKWARD(vel):
GPIO.output(IN1,GPIO.LOW)
GPIO.output(IN2,GPIO.HIGH)
GPIO.output(IN3,GPIO.HIGH)
GPIO.output(IN4,GPIO.LOW)
PWMA.start(vel)
PWMB.start(vel)
def LEFT(vel):
GPIO.output(IN1,GPIO.LOW)
GPIO.output(IN2,GPIO.LOW)
GPIO.output(IN3,GPIO.LOW)
GPIO.output(IN4,GPIO.HIGH)
PWMA.start(vel)
PWMB.start(vel)
def RIGHT(vel):
GPIO.output(IN1,GPIO.HIGH)
GPIO.output(IN2,GPIO.LOW)
GPIO.output(IN3,GPIO.LOW)
GPIO.output(IN4,GPIO.LOW)
PWMA.start(vel)
PWMB.start(vel)
def STOP():
GPIO.output(IN1,GPIO.LOW)
GPIO.output(IN2,GPIO.LOW)
GPIO.output(IN3,GPIO.LOW)
GPIO.output(IN4,GPIO.LOW)2.4 Baile
Vamos a realizar un sencillo programa para romper el hielo, vamos a imitar los movimientos de la Sojourner

Crédito de imagen: Proyecto Mars Pathfinder
Unos movimientos delante, atrás, derecha, izquierda y paro utilizando la librería anterior:
Solución
- Ponemos el fichero MOVIMIENTOS.py que hemos visto en la misma carpeta que vamos a crear este programa.
- En este programa importamos la librería de MOVIMIENTOS.py.
- Vamos llamando a las distintas funciones de movimientos, fijamos la velocidad al 50%, insertando entre ellas un tiempo de retraso de la librería time de 1 segundo.
¿Te atreves? Sino, mira la solución:
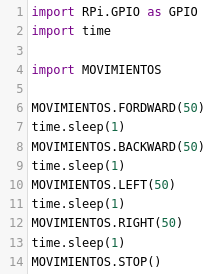
Fichero 2-6-Baile.py
2.5 Movimientos con tecla
Ahora vamos a hacer lo mismo, pero gobernado por el teclado:
- PARAR = tecla ESPACIO
- ADELANTE=FORDWARD = f
- ATRAS=BACKWARD = b
- DERECHA=RIGHT = r
- IZQUIERDA=LEFT = l
Solución
- Ponemos el fichero MOVIMIENTOS.py que hemos visto en la misma carpeta que vamos a crear este programa.
- En este programa importamos la librería de MOVIMIENTOS.py.
- Vamos llamando a las distintas funciones de movimientos según la tecla pulsada, fijamos la velocidad al 30% para que nos de tiempo de gobernarlo, por pantalla va saliendo el mensaje del estado.
- Todo dentro de un bucle de manera que si pulsamos la tecla espacio sale del buble no sin antes parar el robot.
¿Te atreves a hacerlo tú solo? Venga!! no le des tantas vueltas

Sino, mira la solución:
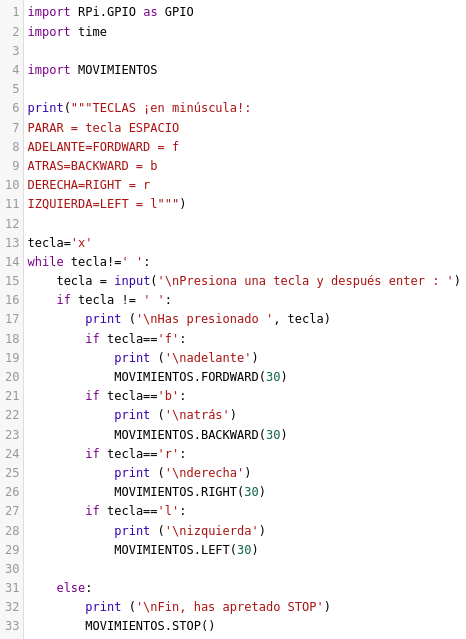
Fichero 2-7-Movimientos-Teclas.py