Micropython
- Preparar ALVIK para MicroPython: Actualizar el firmware de Alvik
- Instalar Micropython
- Hola mundo
- Empezando MicroPython de Alvik
- Introducción al Python
- Arduino Alvik API
Preparar ALVIK para MicroPython: Actualizar el firmware de Alvik
Actualizar el firmware significa que nuestro Alvik le instalamos el interpretador de micropython y por lo tanto podremos:
- Programar en código con Python
- Programar en bloques con mBlock
Si ya tiene el firmware instalado en el Alvik puedes saltarte esta página
Con este firmware no podemos programar con Arduino IDE
Antes de nada enciende el Alvik con esta precaución :
Primero nos aseguramos que el Alvik este APAGADO antes de conectarlo con el PC
en caso contrario se puede perjudicar la batería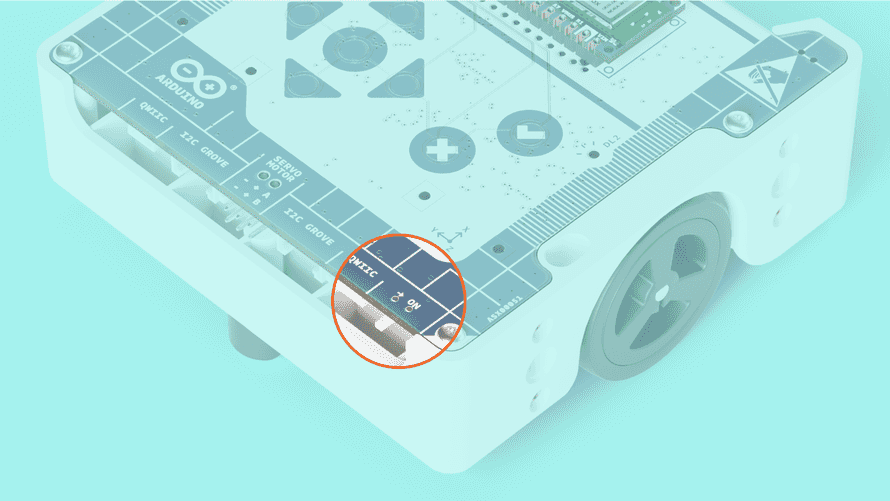
Licencia CC-BY-NC-SA origen https://courses.arduino.cc/explore-robotics-micropython/lessons/getting-started/
Luego lo conectamos por cable
Licencia CC-BY-NC-SA origen https://courses.arduino.cc/explore-robotics-micropython/lessons/getting-started/
Y ahora ya podemos encender nuestro Alvik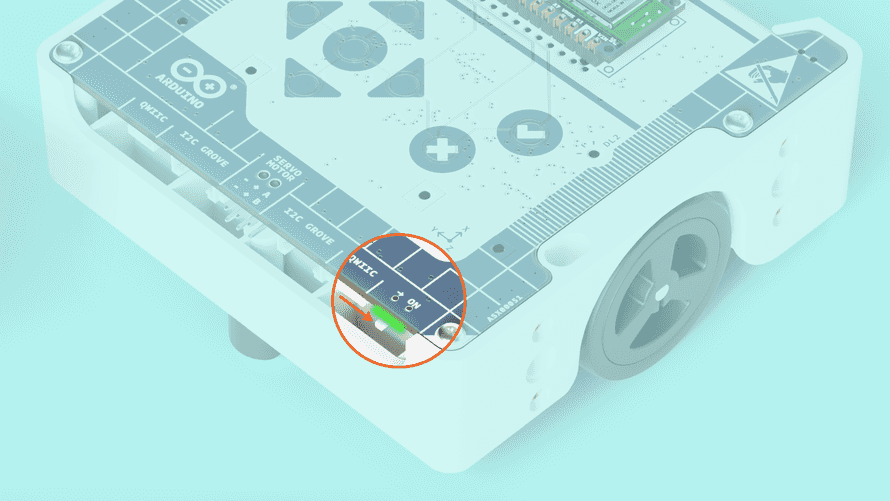
Licencia CC-BY-NC-SA origen https://courses.arduino.cc/explore-robotics-micropython/lessons/getting-started/
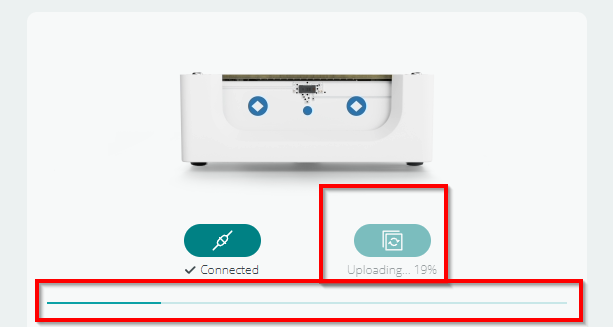
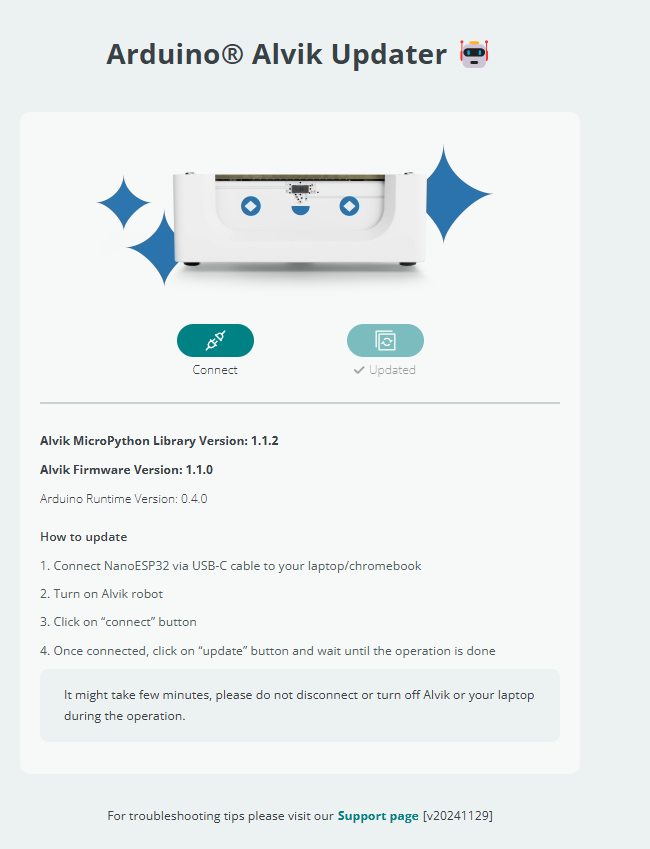
Actualizamos el FIRMWARE
Esto lo hacemos una vez, entramos en https://alvikupdate.arduino.cc/ damos a conectar y luego updated (si no sabes qué puerto es, desconecta y conecta y te fijas cual aparece)
Puede tardar varios ciclos, paciencia
Asegúrate de tener el ALVIK encendido
Hasta que sale esta pantalla de éxito
ATENCIÓN ¿Y SI DA PROBLEMAS?
Por ejemplo se ha quedado enganchado, lo has desconectado antes de hora... entonces la solución pasa por utilizar un flasheador más potente
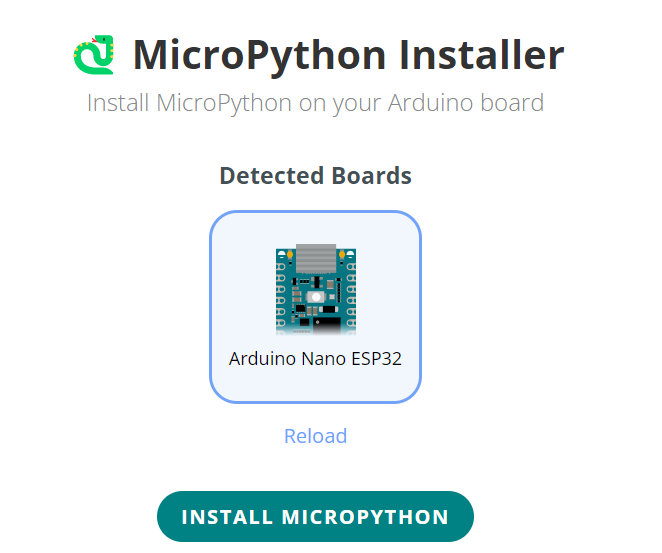
MicroPython Installer
Descargamos el programa y ejecutamos teniendo conectado el ESP32 del Alvik, (no hace falta encender el robot, pues sólo trabajamos con el ESP32) lo detecta y simplemente le damos a Instalar Micropython dentro del chip
Descargable en https://labs.arduino.cc/en/labs/micropython-installer
Si sigue puñetero y no detecta el Arduino Nano ESP32 tendrás que ponerlo en modo Bootoloader, haz los pasos 1, 2 y 3 de https://libros.catedu.es/books/arduino-alvik/page/preparar-alvik-para-arduino-ide-modo-bootloader y vuelve a intentarlo con el MicroPython Installer
Al acabar de instalar, sale este mensaje :
Aconsejamos apagar y desconectar totalmente y volver a conectar (acuérdate que no hay que conectar el ALVIK en el PC con el ALVIK encendido, lo conectas con el PC apagado y luego lo enciendes, tal y como dice arriba del todo)
Entramos en https://alvikupdate.arduino.cc/ damos a conectar y luego updated (si no sabes qué puerto es, desconecta y conecta y te fijas cual aparece)
AQUÍ VA A TARDAR VARIOS, VARIOS CICLOS, paciencia, paciencia
Asegúrate de tener el ALVIK encendido
Hasta que sale esta pantalla de éxito
Instalar Micropython
Conceptos previos:
- Los lenguajes de alto nivel, es decir el código, que es entendible por los humanos (C++, Java, Python...) son textos que se tienen que traducir al lenguaje entendible por el procesador MCU (Micro Controler Unit). Este lenguaje de bajo nivel que está escrito en binario es difícil de entender para los humanos
- El Compilador es un programa que Interpreta este texto de lenguaje de alto nivel, y lo convierte en lenguaje de bajo nivel
- El Arduino Alvik se puede programar con Arduino IDE como con Micropytno, los dos son de alto nivel
Tanto Micropython como Arduino IDE son lenguajes de tipo CODIGO por lo tanto sólo se aconseja EN SECUNDARIA
Cuando permita lenguaje tipo BLOQUES como Scratch, ya será adecuado para PRIMARIA
¿Dónde se compila Micropython?
Como puedes ver en este vídeo en 21:20 Python se compila dentro del microcontrolador es decir, dentro del ESP32. A diferencia con otros lenguajes, como el C++, el ordenador tiene el compilador, y se lo da ya en binario.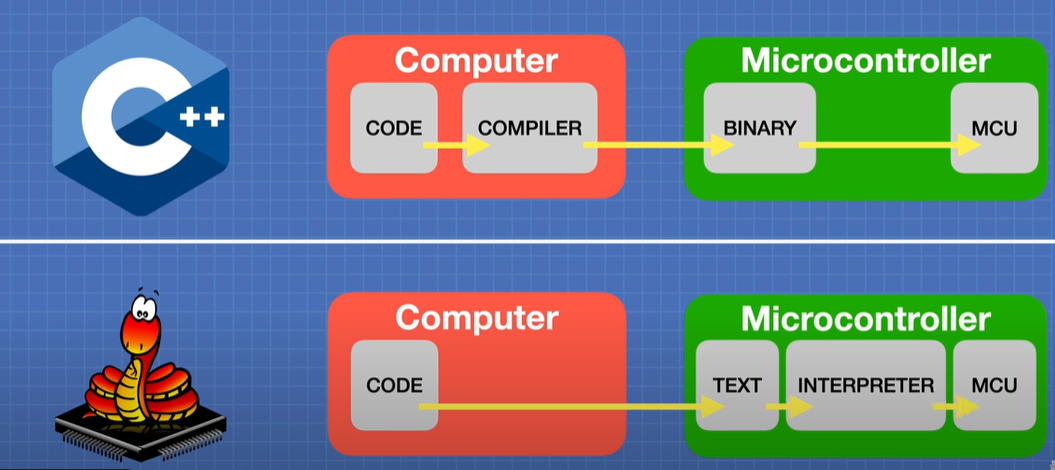
Fuente vídeo Exploring the Arduino Nano ESP32 | MicroPython & IoT
¿Y a mi qué más me da?
Pues sí que importa....
Si programas ESP32 con Arduino IDE o Arduino Cloud o con Steamakersblock (que está basado en C++) te has cargado el compilador Python que has puesto en "Actualizar firmware" del ESP32 luego si quieres programar en Python, tienes que volver a "Actualizar firmware"
O sea, si pasas de [ArduiIDE] o [Arduino Cloud] o [Steamakersblok] a Micropytho tienes que volver a instalar el compilador Micropython
¿Y con esto ya puedo crear mis programas con Micropython?
No, con esto tienes el compilador interpretador dentro del chip, pero necesitas un editor en tu PC y que se comunique con el Micropython del chip
Arduino Lab for Micropython
Tal y como dice la página https://docs.arduino.cc/micropython/ hay dos editores para cargar MicroPython en el Arduino Alvik
- Arduino Lab for Micropython https://labs.arduino.cc/en/labs/micropython
- OpenMW https://openmv.io/pages/download
Nosotros en este curso elegimos Arduino Lab for Micropython por su sencillez y adaptación al Arduino Alvik
Tal y como dice aquí ES UN PROGRAMA PORTABLE, es decir, no hay que instalarlo, simplemente descomprimir y ejecutar
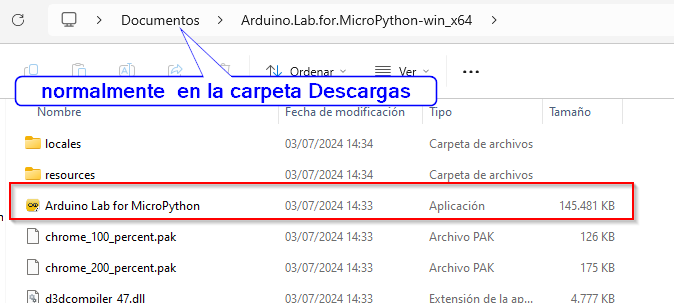
Ejecutamos el programa en el lugar donde lo hemos descomprimido (o donde quieras llevarte la carpeta) :
Primero nos aseguramos que el Alvik este APAGADO antes de conectarlo con el PC
en caso contrario se puede perjudicar la batería
Licencia CC-BY-NC-SA origen https://courses.arduino.cc/explore-robotics-micropython/lessons/getting-started/
Luego lo conectamos por cable
Licencia CC-BY-NC-SA origen https://courses.arduino.cc/explore-robotics-micropython/lessons/getting-started/
Y ahora ya podemos encender nuestro Alvik
Licencia CC-BY-NC-SA origen https://courses.arduino.cc/explore-robotics-micropython/lessons/getting-started/
Al ejecutar el programa, vemos:
- Botón para conectar la placa
- Ejecutar o para el programa
- Gestor de fichero
- Donde escribimos el programa
- Ventana de estado
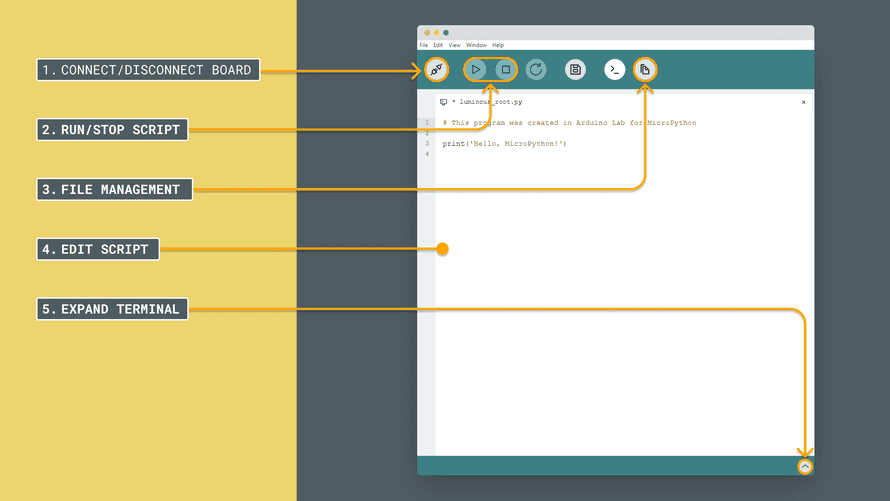
Licencia CC-BYSA Fuente https://docs.arduino.cc/micropython/environment/code-editor/
En el gestor de ficheros encontramos
- Los archivos que hay en la placa: Puedes ver y administrar scripts o datos guardados directamente en la placa.
- Los archivos que hay en tu equipo: lo que le permite seleccionar y administrar archivos para cargar o descargar.
- Descargar/Subir archivos: Utiliza esta opción para transferir archivos entre su equipo y la placa. Puedea cargar nuevos scripts o descargar registros de datos de su placa.
- Crear archivo/carpeta: Esta opción le permite crear nuevos archivos o carpetas directamente en la placa o en el directorio de su proyecto, lo que facilita la organización de su código y recursos.
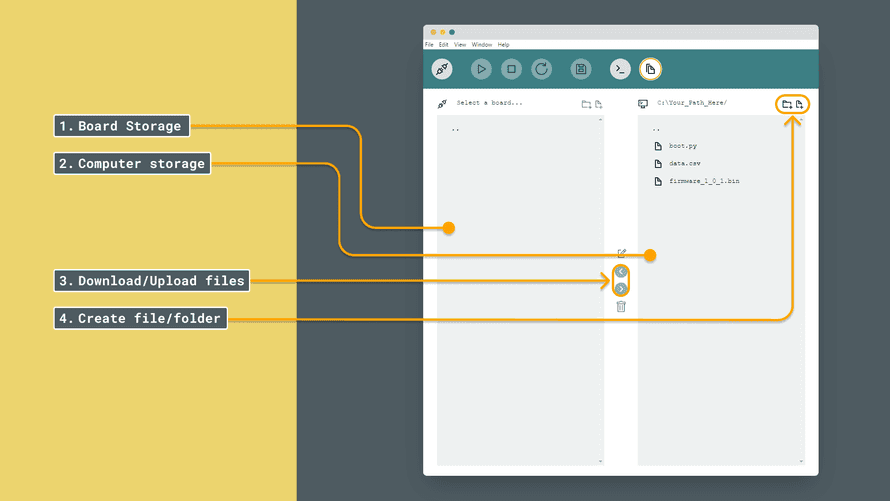 Licencia CC-BYSA Fuente https://docs.arduino.cc/micropython/environment/code-editor/
Licencia CC-BYSA Fuente https://docs.arduino.cc/micropython/environment/code-editor/
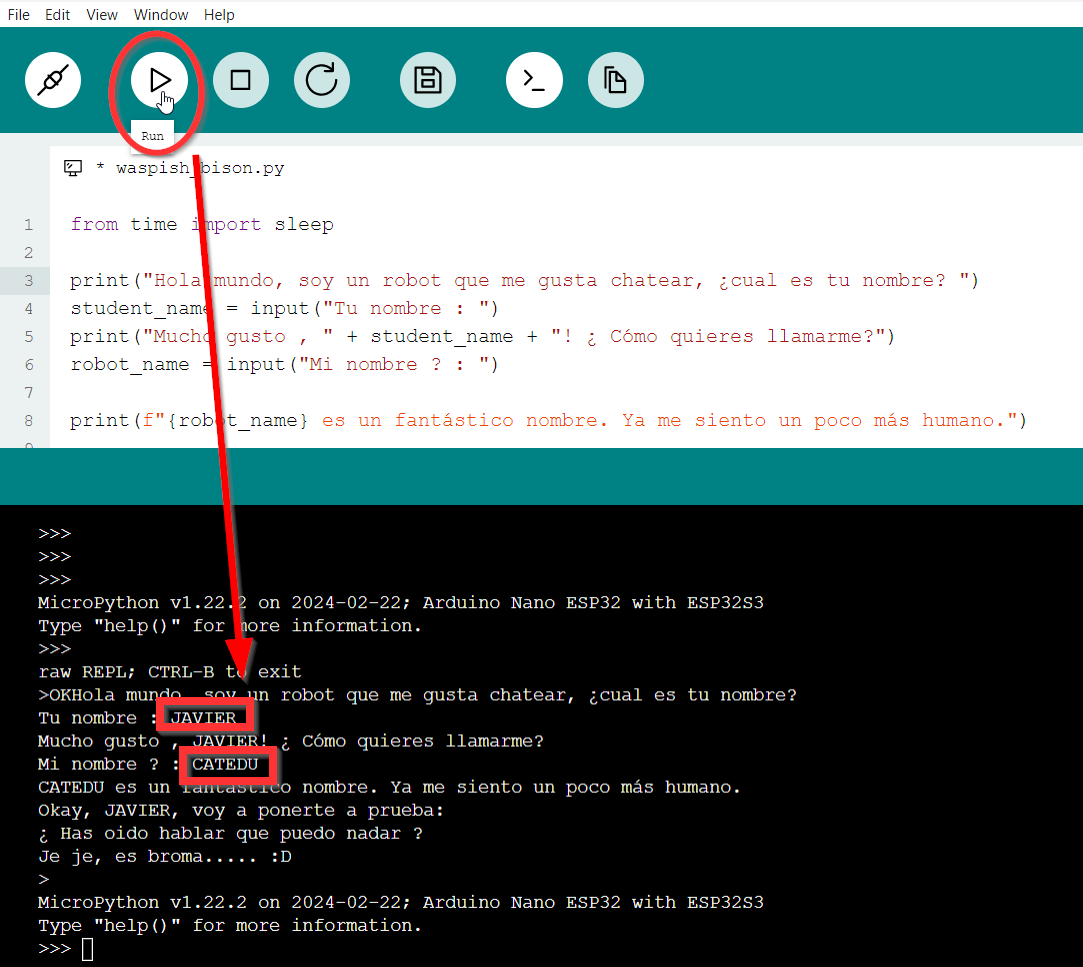
Hola mundo
Vamos a comenzar con nuestro primer programa en Arduino Lab for MicroPython, el clásico Hola mundo ponemos este programa:
from time import sleep
print("Hola mundo, soy un robot que me gusta chatear, ¿cual es tu nombre? ")
student_name = input("Tu nombre : ")
print("Mucho gusto , " + student_name + "! ¿ Cómo quieres llamarme?")
robot_name = input("Mi nombre ? : ")
print(f"{robot_name} es un fantástico nombre. Ya me siento un poco más humano.")
sleep(2) # Use sleep() to make interaction feel more natural
print(f"Okay, {student_name}, voy a ponerte a prueba:")
sleep(2)
print("¿ Has oido hablar que puedo nadar ?")
sleep(4)
print("Je je, es broma..... :D")
sleep(5)Adaptado de https://courses.arduino.cc/explore-robotics-micropython/lessons/getting-started/
Pulsamos a conectar, nos pregunta por el puerto
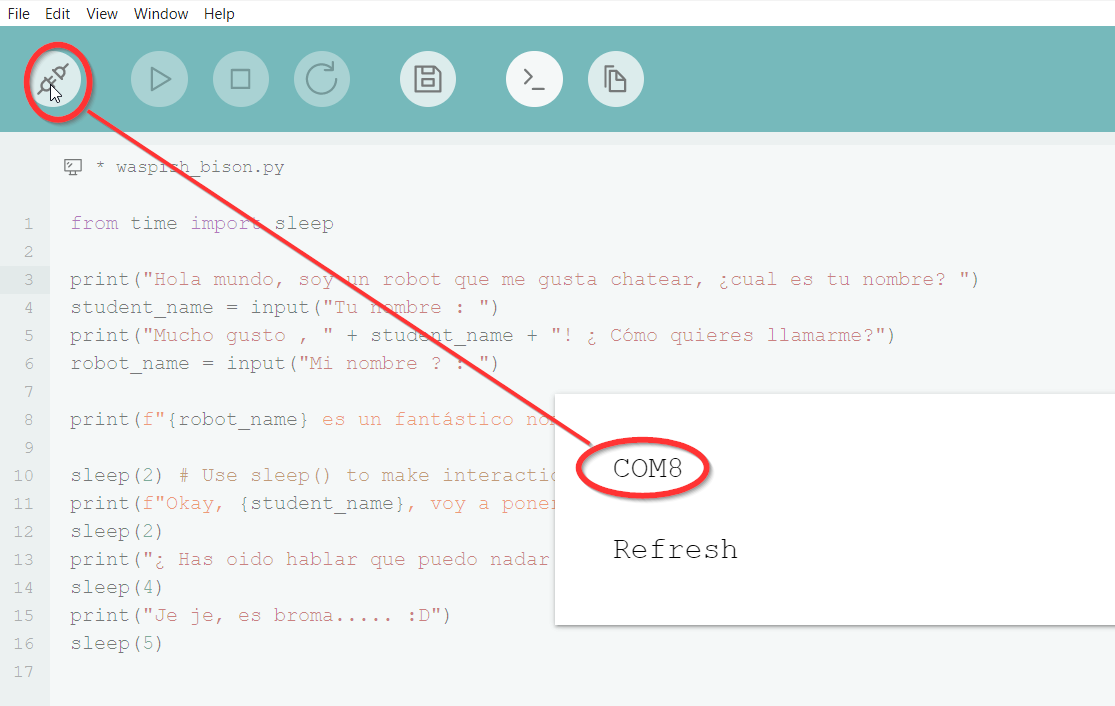
Runeamos y vamos contestando a sus preguntas
ATENCIÓN si quieres que se ejecute en el Alvik SIN necesidad de darle al "play" del programa, entonces lo tienes que grabar como main.py en el Alvik entonces se ejecuta automáticamente
Empezando MicroPython de Alvik
Inspirado en el esquema del tutorial MicroPython Basics autora Francesca Sanfilippo & Karl Söderby
Hemos visto la función print visualiza un mensaje en la cónsola :
print('Hola mundo !')Podemos introducir una variable, frase que contenga el texto, la función time.sleep(segundos) que hace una pausa, (para utilizar esta función se necesita importar la librería time con import time ) y dentro de un bucle while que se ejecuta mientras sea verdadero lo que le sigue, en este caso while True se ejecutará siempre:
import time
frase = "Hola mundo !!"
while True:
print(frase)
time.sleep(1)Aquí se utiliza
- una función con def una variable contador que en la función se declara global de esta manera se puede utilizar dentro de cualquier función del programa (en este caso el programa principal la funcion_contar().
- Vemos la típica operación de cuenta contador = contador + 1
- print visualiza dos cosas, la frase y el contador
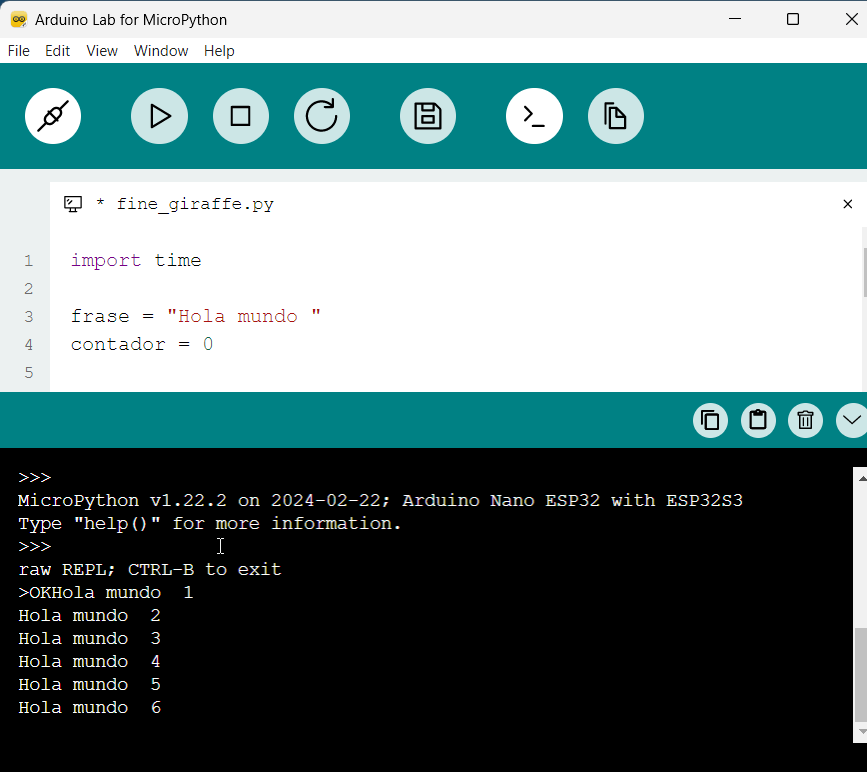
import time
frase = "Hola mundo "
contador = 0
def funcion_contar():
global contador
contador = contador + 1
while True:
funcion_contar()
print(frase, contador)
time.sleep(1)El resultado:
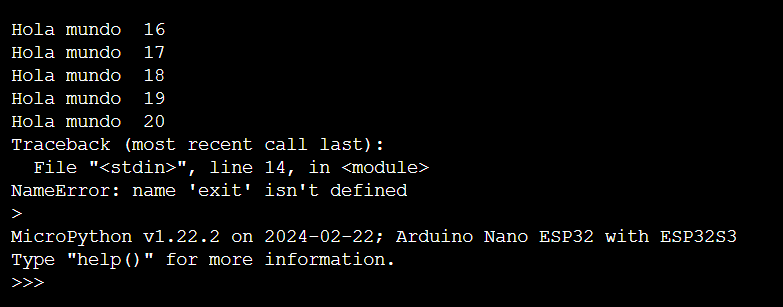
Aquí utilizamos el condicional if con su auxiliar else y la función exit para acabar el programa:
import time
frase = "Hola mundo "
contador = 0
maximo = 20
def funcion_contar():
global contador
contador = contador + 1
while True:
funcion_contar()
if contador>20 :
exit
else :
print(frase, contador)
time.sleep(1)Lo que provoca que a los 20 finalice
Podemos usar en vez de variables numéricas, variables tipo array para los bucles :
Catedu = ['Javier', 'Santiago', 'Silvia', 'Berta', 'Cristina', 'Nacho', 'Arturo', 'Chefo', 'Vladi', 'Ruben', 'Pablo', 'JuanFran']
def printCatedus():
for persona in Catedu:
print(persona)
printCatedus()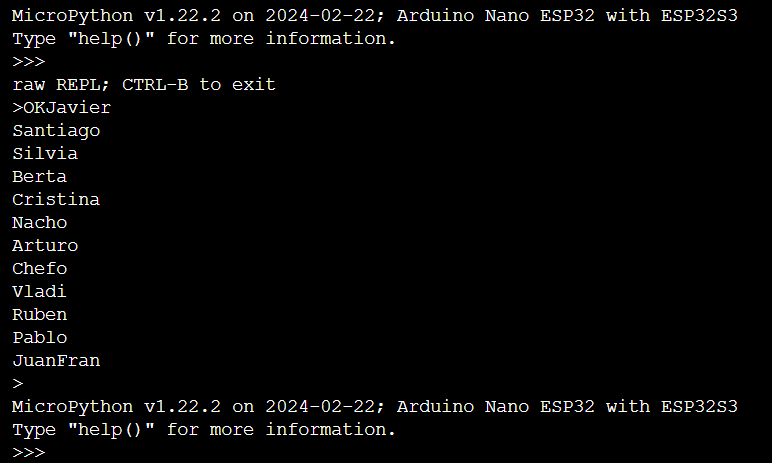
Con esto ya podemos avanzar, pero si quieres
Introducción al Python
Esta es una muy breve introducción al Python como recordatorio de algunas instrucciones si ya has utilizado este lenguaje.
Si es la primera vez, te recomendamos que visites nuestro curso PYTHON PARA TODOS Python for everybody por Charles R. Severance licencia CC-BY-NCSA que empieza desde cero.
Lenguajes, intérpretes y compiladores
Python es un lenguaje de alto nivel destinado a ser relativamente sencillo para que los humanos lean y escriban y para que los ordenadores lean y procesen. Otros lenguajes de alto nivel incluyen Java, C ++, PHP, Ruby, Basic, Perl, JavaScript y muchos más. El hardware real dentro de la Unidad Central de Procesamiento (CPU) no comprende ninguno de estos lenguajes de alto nivel.
La CPU entiende un idioma que llamamos lenguaje de máquina. El lenguaje de máquina es muy simple y francamente muy tedioso de escribir porque está representado en ceros y unos:
El lenguaje de máquina parece bastante simple en la superficie, dado que solo hay ceros y unos, pero su sintaxis es aún más compleja y mucho más compleja que Python. Muy pocos programadores escriben lenguaje de máquina. En su lugar, creamos varios traductores para permitir que los programadores escriban en lenguajes de alto nivel como Python o JavaScript y estos traductores convierten los programas al lenguaje de máquina para su ejecución real por parte de la CPU.
Estos traductores de lenguaje de programación se dividen en dos categorías generales: (1) intérpretes y (2) compiladores.
Un intérprete lee el código fuente del programa como está escrito por el programador, analiza el código fuente e interpreta las instrucciones sobre la marcha. Python es un intérprete y cuando ejecutamos Python de forma interactiva, podemos escribir una línea de Python (una oración) y Python la procesa de inmediato y está lista para que escribamos otra línea de Python.
>>> x = 6
>>> print(x)
6
>>> y = x * 7
>>> print(y)
42
>>>Está en la naturaleza de un intérprete poder tener una conversación interactiva como se muestra arriba. A un compilador debemos entregarle todo el programa en un archivo, y luego ejecuta un proceso para traducir el código fuente de alto nivel al lenguaje de máquina y luego el compilador coloca el lenguaje de máquina resultante en un archivo para su posterior ejecución.
Variables
Las variables son como cajas que puedes meter valores. Y los valores pueden ser de varios tipos :
- int si son enteros
- float si tienen decimales
- binarioDeben comenzar por 0b. Por ejemplo: 0b110, 0b11
- string son frases, son "cadenas" de caracteres entre "
- bool Solamente hay dos literales booleanos True o False
- lista Se pueden declarar variables que son conjuntos por ejemplo Colores = ["verde", "rojo", "naranja" ]
Para crear una variable puedes usar cualquier palabra, x, y, z o Nombre_alumno ... pero algunas palabras no puedes usar, ver
Para visualizar variables puedes usar la instrucción print poniendo entre paréntesis el valor o variable que quieres visualizar.
En la siguiente ventana puedes dar al botón play y ver el resultado
Modifica los valores como quieras, es un intérprete, juega y dale al play para ver el resultado
Como puedes ver se ha introducido un operador el + que realiza la suma del valor de x original (43) y se le incrementa una unidad resultando en la impresión un 44.
Cadenas
Cadenas son secuencias de caracteres, por ejemplo la palabra "banana"
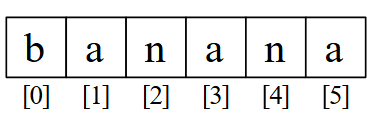
fuente 'Python for Everybody' por Charles R. Severance
Se puede obtener su longitud con la función len, o obtener un carácter ...
Operadores
Este apartado de operadores es adaptado de Federico Coca Guia de Trabajo de Microbit CC-BY-SA
Los operadores aritméticos se utilizan para realizar operaciones matemáticas como sumas, restas, multiplicaciones, etc.
| Operador | Descripción | Ejemplo |
|---|---|---|
| + | Suma o concatenación en textos | 5+3=8, "Hola" + "Mundo" = "Hola Mundo |
| - | Diferencia | 6-3=3 |
| * | Multiplicación | 3*3=9 |
| / | División | 6/2=3 |
| // | Parte entera de un cociente | 10//3=3 |
| % | Resto de un cociente | 10%3=1 |
| ** | Potenciación | 5**2=25 |
Los operadores de asignación se utilizan para asignar valores a variables.
| Operador | Descripción | Ejemplo |
|---|---|---|
| = | Asignación | x=4, a = a + 1 |
| += | Suma y asignación | x+=1 equivale a x = x + 1 |
| -= | Diferencia y asignación | x-=1 equivale a x = x - 1 |
| *= | Multiplicación y asignación | x*=3 equivale a x = x * 3 |
| /= | División y asignación | x/=3 equivale a x = x / 3 |
| %= | Asignación de restos | x%=3 equivale a x = x % 3 |
| **= | Asignación de exponentes | x**=3 equivale a x = x ** 3 |
Los operadores de comparación comparan dos valores/variables y devuelven un resultado booleano: Verdadero o Falso True o False.
| Operador | Descripción | Ejemplo |
|---|---|---|
| == | Igual a | 2==3 retorna False |
| != | Distinto de | 2!=3 retorna True |
| < | Menor que | 2<3 retorna True |
| > | Mayor que | 2>3 retorna False |
| <= | Menor o igual que | 2<=3 retorna True |
| >= | Mayor o igual que | 2>=3 retorna False |
Los operadores lógicos se utilizan para comprobar si una expresión es Verdadera o Falsa. Se utilizan en la toma de decisiones.
| Operador | Descripción | Ejemplo |
|---|---|---|
| and | AND lógica | a and b #True si a y b son ciertos |
| or | OR lógica | a or b #True si a o b son ciertos |
| not | NOT lógica | not a #True si el operador a es falso |
| in | pertenencia | Devuelve True si pertenece |
| no int | no pertenencia | Devuelve True si no pertenece |
| is | identidad | Devuelve True si son iguales |
| is not | no identidad | Devuelve True si no son inguales |
Los operadores bit a bit o bitwise actúan sobre los operandos como si fueran cadenas de dígitos binarios. Operan bit a bit:
| Operador | Descripción | Ejemplo |
|---|---|---|
| & | AND bit a bit | 5&6 # 101 & 110 = 110 = 4 |
| | | OR bit a bit | 5 \| 6 # 101 \| 110 = 111 = 7 |
| ~ | NOT bit a bit | ~3 # ~011 = 100 = -4 |
| ^ | XOR bit a bit | 5^3 # 101^011 = 110 = 6 |
| << | Desplazamiento izquierda | 4<<1 # 100 << 1 = 1000 = 8 |
| >> | Desplazamiento derecha | 4 >> 1 # 100 >> 1 = 010 = 2 |
Prueba, juega con este código:
Comentarios en Python
Una sola línea : Escribiendo el símbolo almohadilla (#) delante del comentario.
Multilínea: Escribiendo triple comillas dobles (“””) al principio y al final del comentario.
Entradas de teclado
Ya hemos visto salidas por pantalla con print, pero ahora con input puede leer variables del teclado, esto es mejor experimentarlo que leerlo :
Fíjate que hay que poner las líneas x = float (x) e y = float(y) para convertirlos a números decimales, en caso contrario las interpreta string y no puede multiplicar en Resultado, pero en el siguiente ejemplo no es necesario en la variable cel (celsius) pues se multiplica por números decimales 32.0 5.0 y 9.0
try y except son dos funciones que son un seguro para el programador por si el usuario en vez de teclear un número, mete un string o carácter
La sangría es importante en Python
La sangría se refiere a los espacios al comienzo de una línea de código. Mientras que en otros lenguajes de programación la sangría en el código es solo para facilitar la lectura, la sangría en Python es muy importante ya que se usa para indicar un bloque de código.
Condicionales
Las instrucciones if: else: son las que nos permiten realizar operaciones según las condiciones puestas. Ojo con la sangría
\n es un carácter especial que significa "Salto de página"
Bucles
- while ejecuta lo contenido en la sangría mientras sea verdadero la condición
- for ejecuta lo contenido en la sangría mientras y va recorriendo la variable dentro del rango creado
Para verlo mejor vamos a ver estos ejemplos
- EJEMPLO BUCLE WHILE
- mientras n sea positivo va ejecutando : imprime n y lo decrementa
- al decrementar llega un momento que deja de ser positivo y finaliza el bucle
- EJEMPLO BUCLE WHILE INFINITO
- Es muy típico en robótica, todo el rato hace el bucle (en robótica para que lea los sensores y realice cosas en los actuadores) pero este ejemplo no esta en un robot sino en tu pc y no queremos que se quede "colgado" luego al teclear "fin" acaba gracias a la instrucción break
- Fíjate que hay una instrucción continue para que pase a la siguiente iteración provocando que no imprime lo tecleado
- EJEMPLO BUCLE FOR FRIENDS
- Va recorriendo la variable friend dentro del cojunto lista friends
- como puedes ver la diferencia entre for y while es que for además recorre la variable
- EJEMPLO BUCLE FOR
- mientras n este en el rango de 0 a 5 se ejecuta
Venga pruébalo !!!
Funciones
No vamos a entrar en detalle, pero observa el siguiente código
- FUNCIONES PREDEFINIDAS Si observas, la primera línea llama a importar una librería externa, import math donde math es un fichero que tienen funciones predefinidas, vamos a utilizar una de ellas, la raiz cuadrada sqrt luego para llamar a esa función que esta definida dentro de math se hace con la instrucción math.sqrt
- FUNCIONES DEFINIDAS POR TI em este caso, se utiliza la palabra def para crear una función, que le vamos a pasar tres argumentos a, b y c y para finalizar la función usamos return para devolver el valor que queremos obtener
Para saber más de Python
| CURSO PYTHON FOR EVERYBODY en español | ver |
| Curso completo de Python 222pag pdf (*) | Descargar |
| Curso completo de Python 422pag (*) | Descargar |
| Curso completo de Python desde 0 (*) | Ver |
| Curso de Python desde 0 (*) | Ver |
| Manual de referencia Python (*) | Ver |
| Programación en Python (*) | Ver |
| Trabajando con ficheros en Python (*) | Ver |
| Programación orientada a objeto en Python (*) | Ver |
| un manual para aquellos usuarios con previos conocimientos de Python, como la programación modular y orientada a objetos. También algunos conocimientos de las librerías tkinter (Para crear interfaces gráficos y SQlite3 (para gestionar bases de datos). (*) |
Descargar |
(*) Agradecimientos a Pere Manel http://peremanelv.com
Arduino Alvik API
Estas instrucciones son específicas del ARDUINO ALVIK
Para acceder a las funciones de Arduino Alvik API tenemos que ejecutar las instrucciones:
alvik = ArduinoAlvik()
alvik.begin()Entonces ya podemos usar las siguientes: (extraido de https://docs.arduino.cc/tutorials/alvik/api-overview/ )
Luego veremos en el apartado de programación del Arduino Alvik con código Arduino IDE que utilizaremos una biblioteca #include "Arduino_Alvik.h" que importa prácticamente las mismas funciones, ver https://libros.catedu.es/books/arduino-alvik/page/programas-arduino-ide-sin-iot
| FUNCION con sus Inputs | Outputs |
| stop() | para todas las funciones Alvik |
| is_on() | true si esta encendido false si esta apagado |
| is_target_reached() | true si ha enviado M o R en el mensaje |
| get_ack() | last_ack: el valor del último mensaje |
| stop() | para todas las funciones Alvik |
| get_orientation() | r: valor de balanceo p: valor de cabeceo y: valor de guiñada |
|
get_accelerations()
ver uso en |
ax ay az |
|
get_gyros()
|
gx by gz |
| get_imu() | las 6 anteriores |
| get_line_sensors() |
left right |
| brake() | Frena el robot |
| get_battery_charge() | battery_soc: el % de la batería |
| get_touch_any() | touch_any es true si se ha apretado cualquier botón |
| get_touch_ok() get_touch_cancel() get_touch_center() get_touch_up() get_touch_left() get_touch_down() get_touch_right() |
touch_ok es true si se ha apretado ok etc...
ver ejemplos en https://libros.catedu.es/books/arduino-alvik/page/robotica-para-infantil y en https://libros.catedu.es/books/arduino-alvik/page/mensajes-a-telegram |
| get_color_raw() get_color_label() |
color |
| get_version() print_status() |
versión del firmware
|
| set_behaviour(behaviour: int) | |
| rotate(angle: float, unit: str = 'deg', blocking: bool = True) | |
| move(distance: float, unit: str = 'cm', blocking: bool = True) | |
| get_wheels_speed(unit: str = 'rpm') | left_wheel_speed: the speed value right_wheel_speed: the speed value |
| set_wheels_speed(left_speed: float, right_speed: float, unit: str = 'rpm') | |
| set_wheels_position(left_angle: float, right_angle: float, unit: str = 'deg') | |
| get_wheels_position(unit: str = 'deg') | angular_velocity |
| drive(linear_velocity: float, angular_velocity: float, linear_unit: str = 'cm/s',angular_unit: str = 'deg/s') | |
| get_drive_speed(linear_unit: str = 'cm/s', angular_unit: str = 'deg/s') | linear_velocity: speed of the robot. angular_velocity: speed of the wheels. |
| reset_pose(x: float, y: float, theta: float, distance_unit: str = 'cm', angle_unit: str = 'deg') | |
| get_pose(distance_unit: str = 'cm', angle_unit: str = 'deg') | x y theta |
| set_servo_positions(a_position: int, b_position: int) | |
| set_builtin_led(value: bool) | |
| set_illuminator(value: bool) | |
| color_calibration(background: str = 'white') | |
|
rgb2hsv(r: float, g: float, b: float) |
h: hue value s: saturation value v: brightness value |
|
get_color(color_format: str = 'rgb') |
r or h g or s b or v |
|
hsv2label(h, s, v) |
color label: like "BLACK" or "GREEN", if possible, otherwise return "UNDEFINED" |
|
get_distance(unit: str = 'cm') |
lee la distancia del sensor TOF: ver ejemplo en https://libros.catedu.es/books/arduino-alvik/page/evita-obstaculos left_tof: 45° to the left object distance center_left_tof: 22° to the left object distance center_tof: center object distance center_right_tof: 22° to the right object distance right_tof: 45° to the right object distance |
|
get_distance_top(unit: str = 'cm') |
top_tof: 45° to the top object distance |
|
get_distance_bottom(unit: str = 'cm') |
bottom_tof: 45° to the bottom object distance |
|
on_touch_ok_pressed(callback: callable, args: tuple = ()) on_touch_cancel_pressed(callback: callable, args: tuple = ()) on_touch_center_pressed(callback: callable, args: tuple = ()) on_touch_up_pressed(callback: callable, args: tuple = ()) on_touch_left_pressed(callback: callable, args: tuple = ()) on_touch_down_pressed(callback: callable, args: tuple = ()) on_touch_right_pressed(callback: callable, args: tuple = ()) |
He intentado hacer programas con estas instrucciones, pero una vez pulsado la tecla, sigue llamando a callback continuamente
No veo su utilidad teniendo get_touch |
Unidades
- m: centimeters
mm: millimeters
m: meters
inch: inch, 2.54 cm
in: inch, 2.54 cm - deg: degrees, example: 1.0 as reference for the other unit. 1 degree is 1/360 of a circle.
rad: radiant, example: 1 radiant is 180/pi deg.
rev: revolution, example: 1 rev is 360 deg.
revolution: same as rev
perc: percentage, example 1 perc is 3.6 deg.
%: same as perc - 'cm/s': centimeters per second
'mm/s': millimeters per second
'm/s': meters per second
'inch/s': inch per second
'in/s': inch per second - 'rpm': revolutions per minute, example: 1.0 as reference for the other unit.
'deg/s': degrees per second, example: 1.0 deg/s is 60.0 deg/min that is 1/6 rpm.
'rad/s': radiant per second, example: 1.0 rad/s is 60.0 rad/min that is 9.55 rpm.
'rev/s': revolution per second, example: 1.0 rev/s is 60.0 rev/min that is 60.0 rpm.
¿Qué es eso de bloking?
Por ejemplo en rotate(angle: float, unit: str = 'deg', blocking: bool = True)
Si es true, todos los eventos no influyen, es decir el microprocesador esta centrado en esa instrucción
Si es falso, el microprocesador es libre de hacer otra cosa a la vez
Utiliza true si quieres precisión o no quieres que nada interaccione con la acción que estas ejecutando