Pin pong Telegram
Como paso previo a enviar y recibir mensajes, vamos a realizar los pasos de este vídeo
https://www.youtube.com/watch?v=eZkb9omr-sA
Paso 1: Librería uTelegram.py
Del repositorio de Jordi Prats
https://github.com/jordiprats/micropython-utelegram/blob/master/utelegram.py
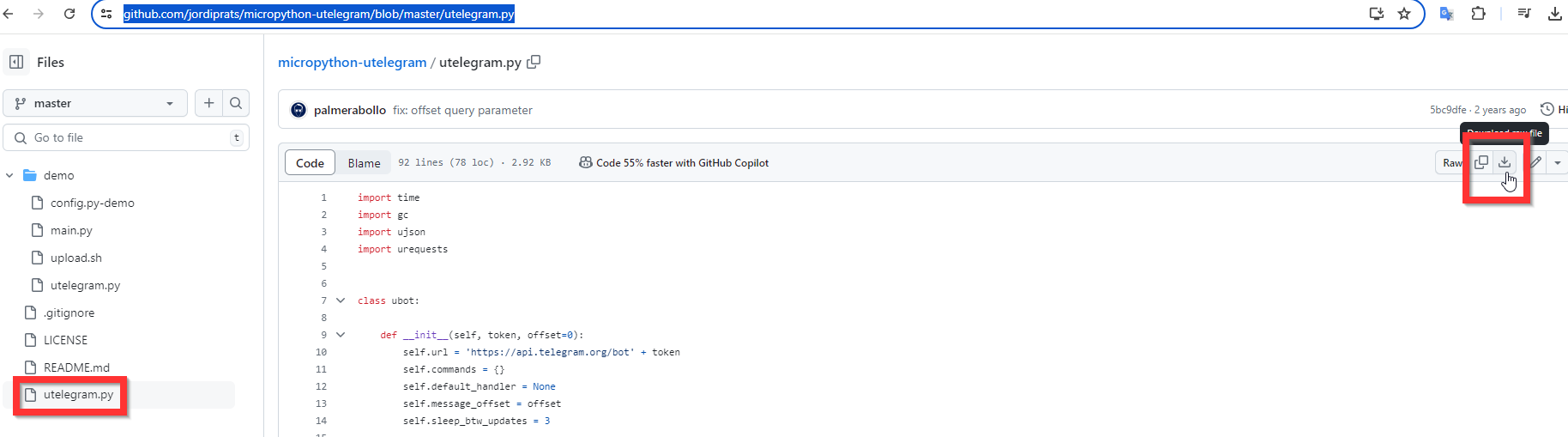
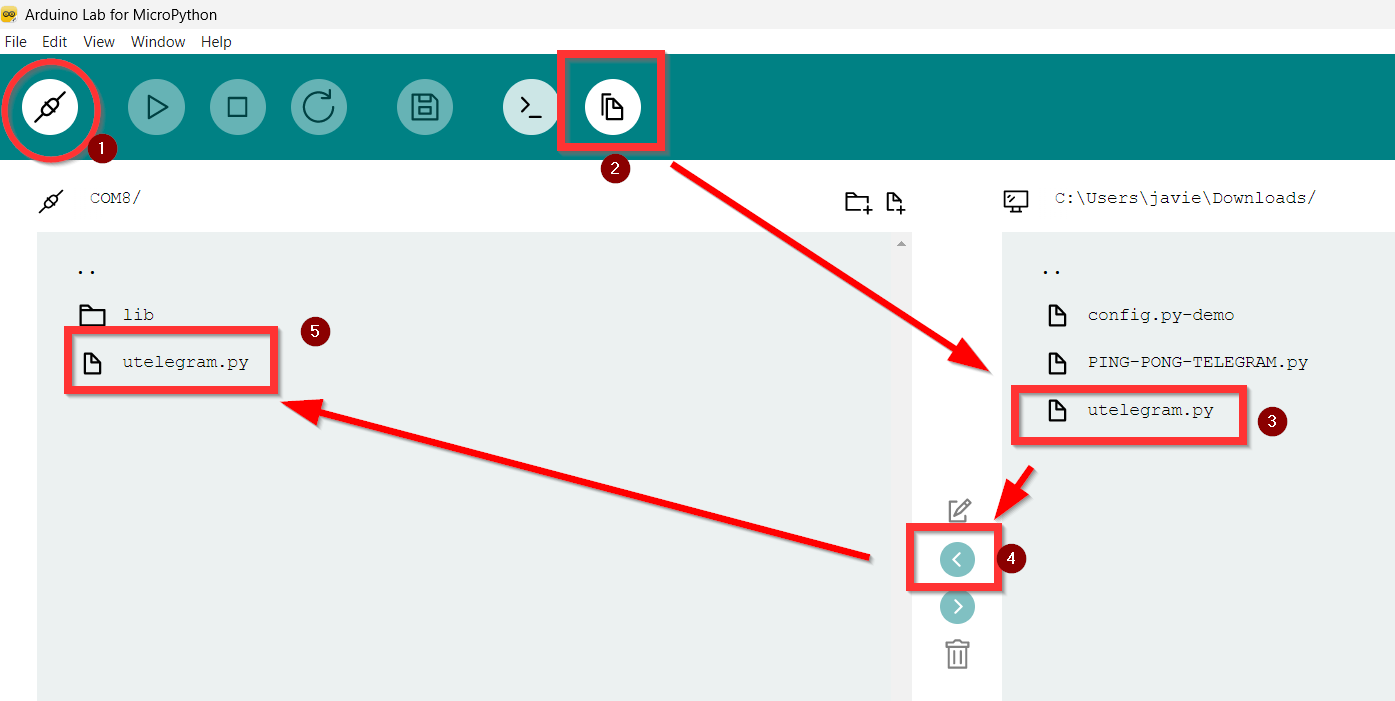
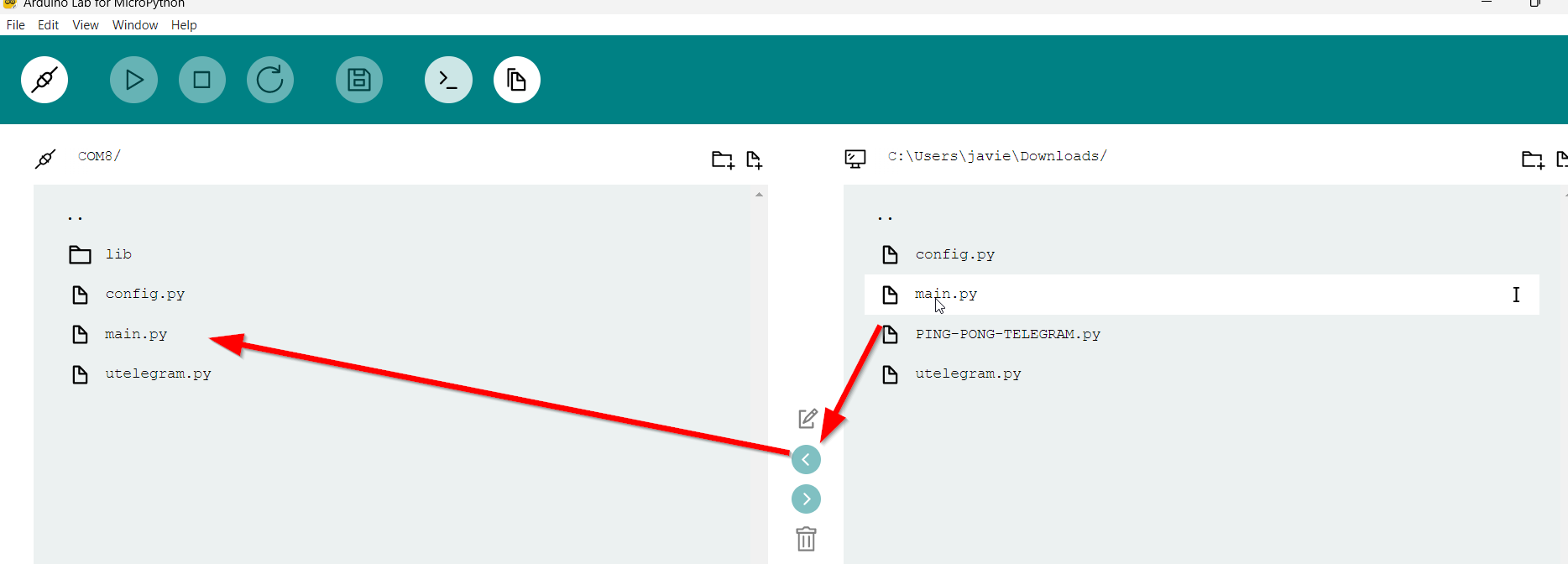
Y la cargamos dentro de nuestro ESP32, ejecutamos Arduino Lab for MicroPython, conectamos, vamos al gestor de archivos y lo llevamos dentro del ESP32 Alvik
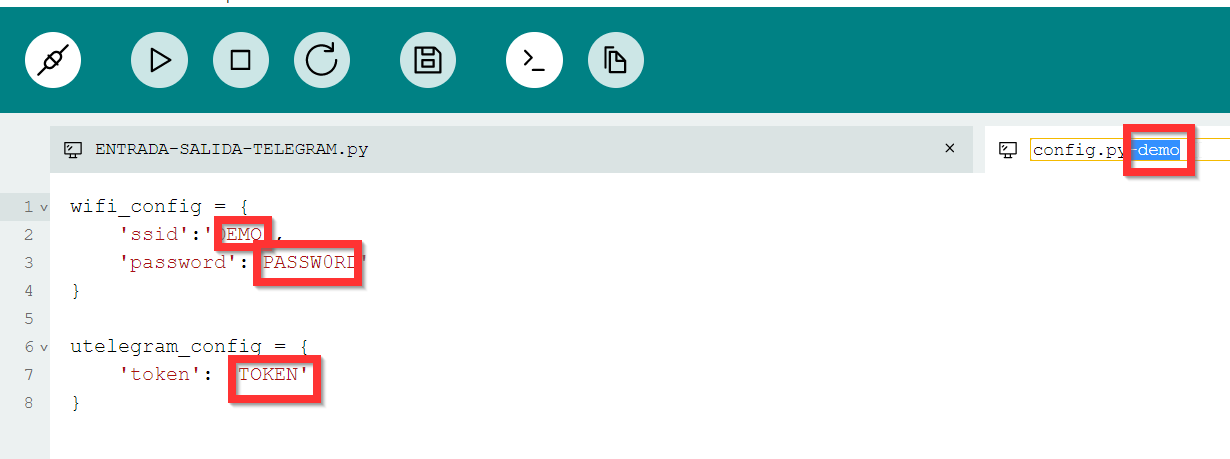
Paso 2 Archivo config.py
El archivo config.py no es más que el archivo que contiene la wifi y el token, se puede descargar de https://github.com/jordiprats/micropython-utelegram/blob/master/demo/config.py-demo o también se puede copiar y pegar de aquí mismo
wifi_config = {
'ssid':'DEMO',
'password':'PASSW0RD'
}
utelegram_config = {
'token': 'TOKEN'
}
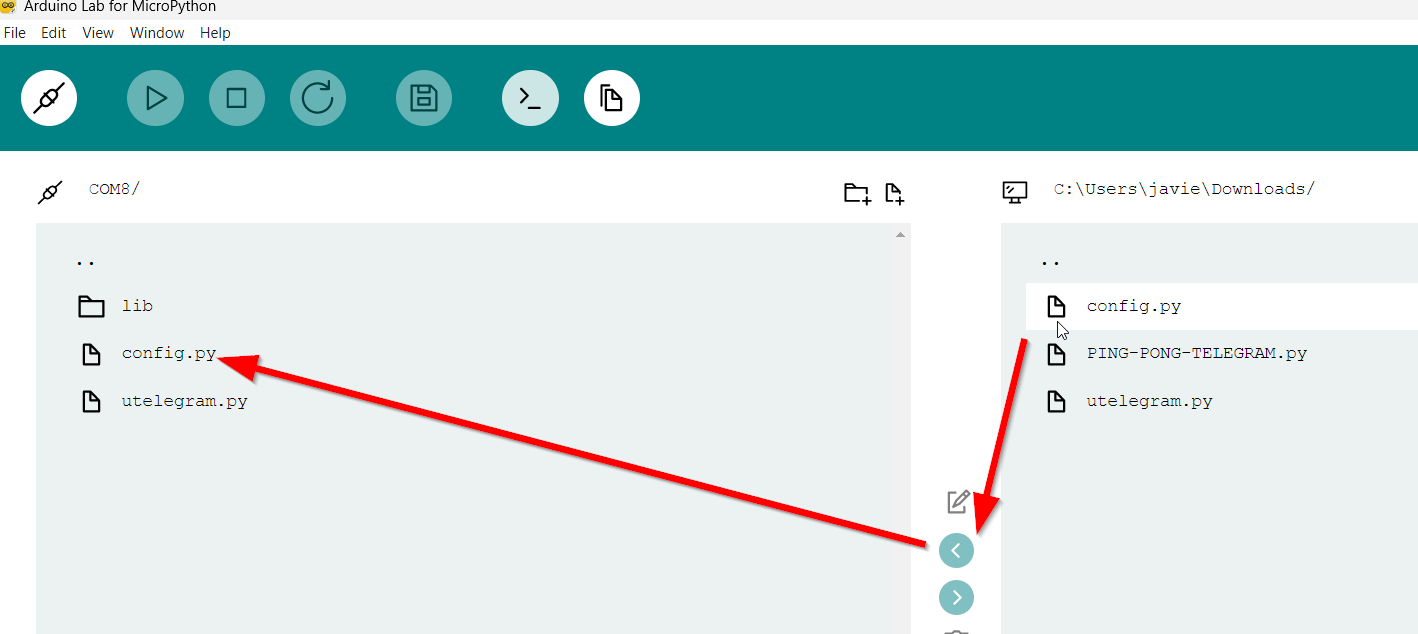
Ponemos los valores de nuestra wifi SSID, PASSWORD y TOKEN y borramos del nombre el -demo y lo dejamos como config.py
y como antes, lo pasamos al ESP32 Alvik
Se podría poner esa información en el código del programa principal main.py tal y como el programa de la página https://libros.catedu.es/books/arduino-alvik/page/mensajes-a-telegram
Paso 3 Programa principal main.py
El programa lo podemos descargar de https://github.com/jordiprats/micropython-utelegram/blob/master/demo/main.py
o de aquí mismo
tal cual, no hay que poner nuestro ssid, ni password ni token pues lo "lee" de config.py
from config import utelegram_config
from config import wifi_config
import utelegram
import network
import utime
debug = True
sta_if = network.WLAN(network.STA_IF)
sta_if.active(True)
sta_if.scan()
sta_if.connect(wifi_config['ssid'], wifi_config['password'])
if debug: print('WAITING FOR NETWORK - sleep 20')
utime.sleep(20)
def get_message(message):
bot.send(message['message']['chat']['id'], message['message']['text'].upper())
def reply_ping(message):
print(message)
bot.send(message['message']['chat']['id'], 'pong')
if sta_if.isconnected():
bot = utelegram.ubot(utelegram_config['token'])
bot.register('/ping', reply_ping)
bot.set_default_handler(get_message)
print('BOT LISTENING')
bot.listen()
else:
print('NOT CONNECTED - aborting')Y lo llevamos al ESP32
Ejecución
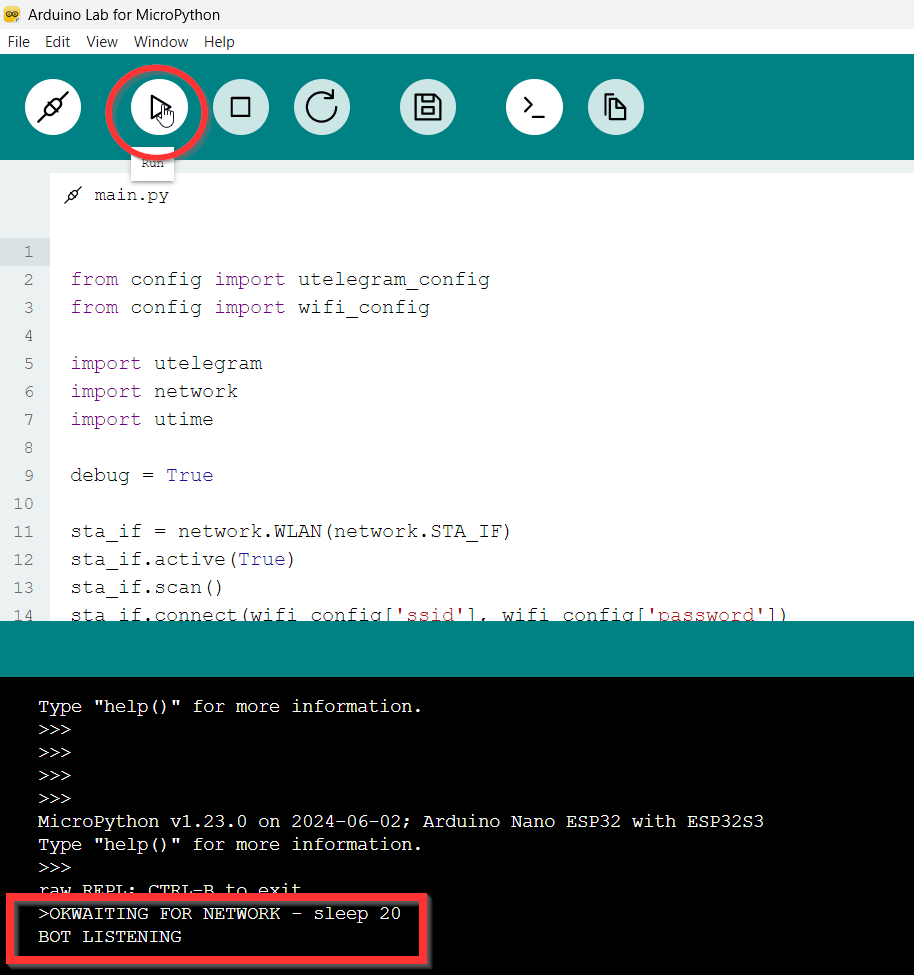
Pulsamos el main.py del ESP32 (no hace falta encender Alvik pues todas las instrucciones son sólo del ESP32), ESPERAR 20 SEGUNDOS hasta que aparezca BOT LISTENING
Nos vamos a Telegram al usuario del bot que hemos creado, le tecleamos /ping y contesta el ESP32 pong
