Conocer Cyberpi
HARDWARE
Cyberpi ya es ya un robot, tipo placa electrónica, basado en ESP32 por lo tanto con Wifi y Bluetooh integrado y se le incorporan los suiguientes SENSORES Y ACTUADORES
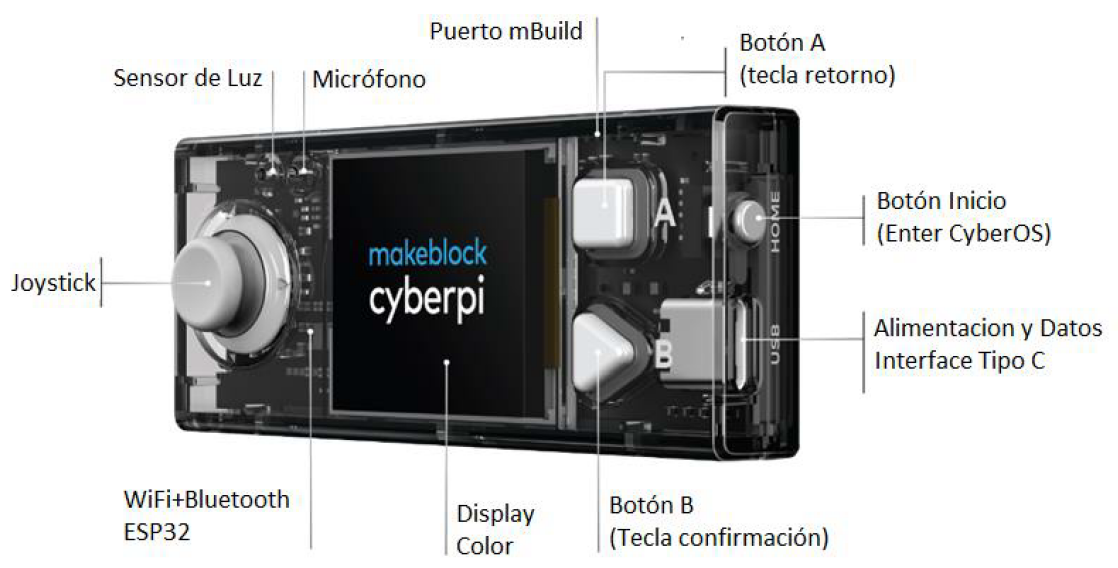

Fuente: Guia Cyberpi Robotix con permiso del autor
HARDWARE - PUERTOS
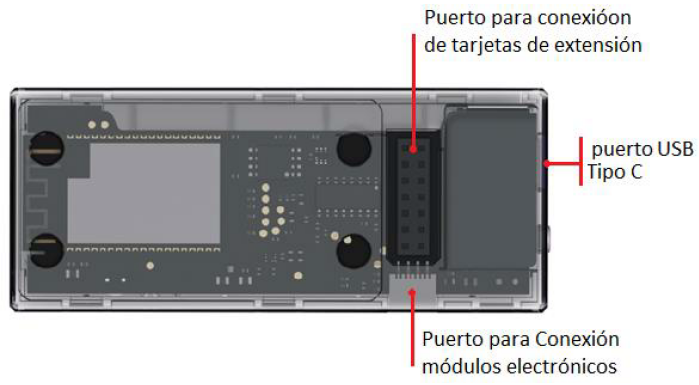
Fuente: Guia Cyberpi Robotix con permiso del autor
- Puerto para conexión de tarjetas de extensión : La tarjeta Cyberpi esta diseñada para conectarse al chasis del robot mBot2, así como otros shields comerciales para esta placa. por ejemplo el de la figura:

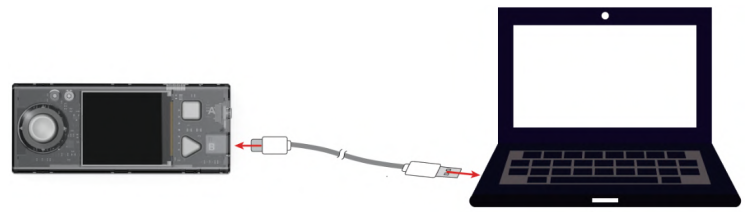
Fuente: Guia Cyberpi Robotix con permiso del autor - Puerto USB tipo C para conectarnos con el PC e instalar los programas que deseemos, Se pueden añadir varios y seleccionar con el Joystick cual ejecuta.
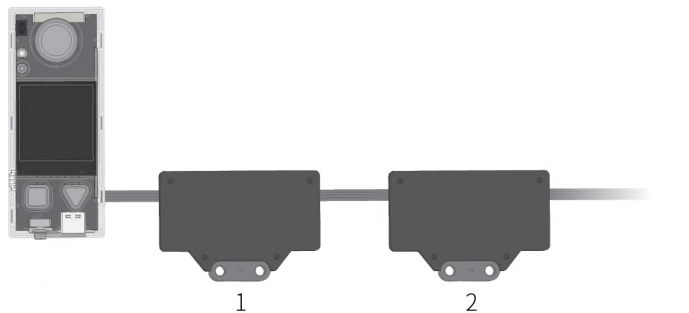
- Puerto para Conexión módulos electrónicos:, con protocolos serie
I2CI2C, permite conexión de diferentes módulos, sin necesidad de tener más puertos, simplemente conectando todos en serie.

Fuente: Guia Cyberpi Robotix con permiso del autor
Fuente: Guia Cyberpi Robotix con permiso del autor
SOFTWARE
Permite una programación en bloques con mBlock5 y con código con Python principalmente.que también se puede hacer desde el mismo mBlock.
Para actualizar el Firmware instalado en Cyberpi, se tiene que hacer desde el mismo mBlock, Aquí cómo se hace.
Para ejecutar los programas que se graban en Cyberpi, se entra en Cambiar programa y seleccionando los programas cargados.
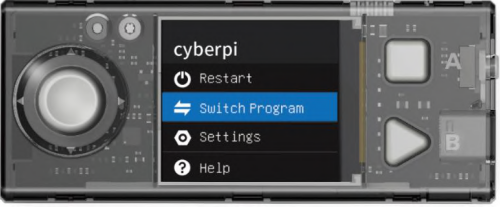

Si se quiere ejecutar los programas predefinidos mover el joystick en el menú anterior a la derecha, y encontramos los típicos: Nivel de voz, sigue líneas, ....
SOFTWARE - MBLOCK
Conectamos Cyberpi con el PC