Control remoto
El contenido de esta página es de {{@12107#bkmrk-pere-manel-verdugo-z}}
PARA REALIZAR ESTE PROGRAMA SE NECESITAN DOS CYBERPIS QUE VAN A ESTAR CONECTADOS EN LA MISMA LAN
Ahora un Cyberpi con su joystick controlará los movimientos del otro Cyberpi montado en su mBot2
{{@12107#bkmrk-pere-manel-verdugo-z}}
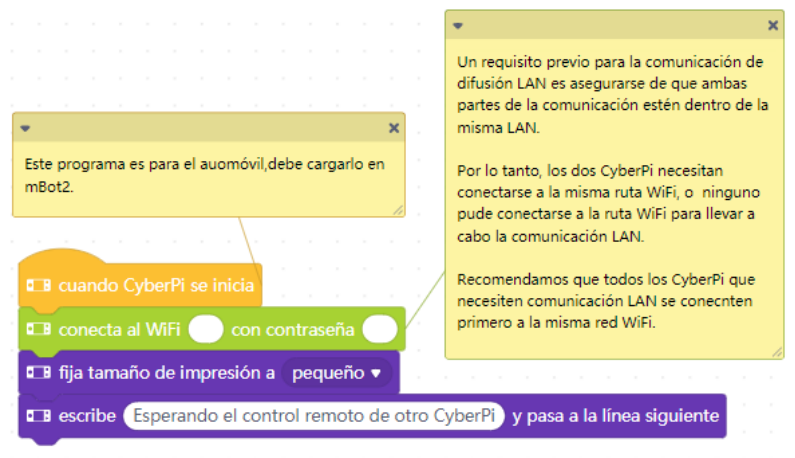
Para este proyecto hemos de cargar dos CyberPy.

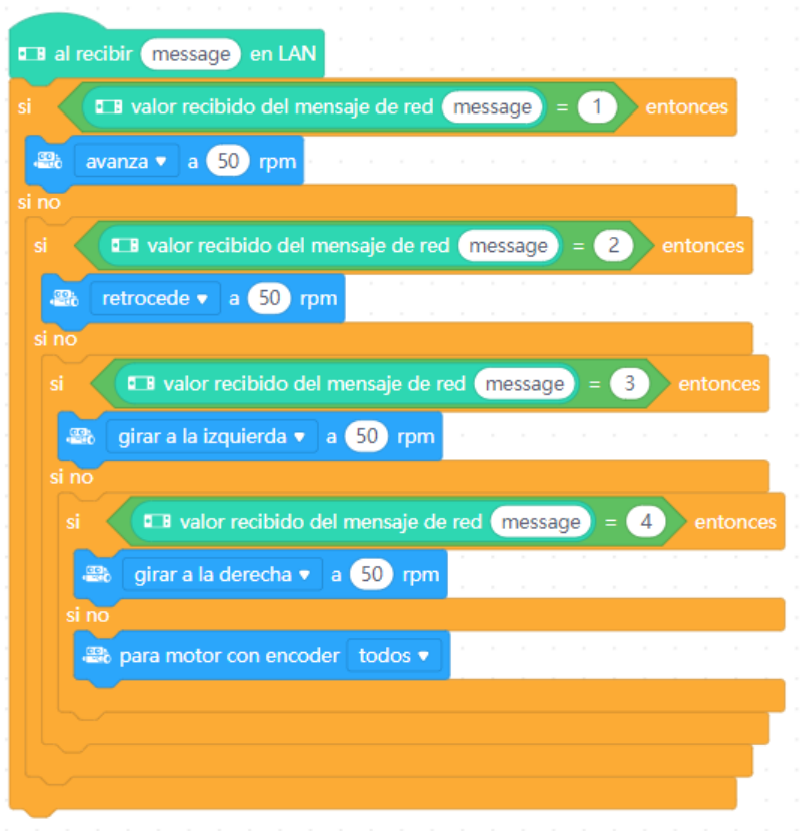
CODIGO EN EL CYBERPI MONTADO CON MBOT2
Hay que poner los dos Cyberpis en la misma Wifi (SSID y contraseña)
{{@12107#bkmrk-pere-manel-verdugo-z}}
{{@12107#bkmrk-pere-manel-verdugo-z}}
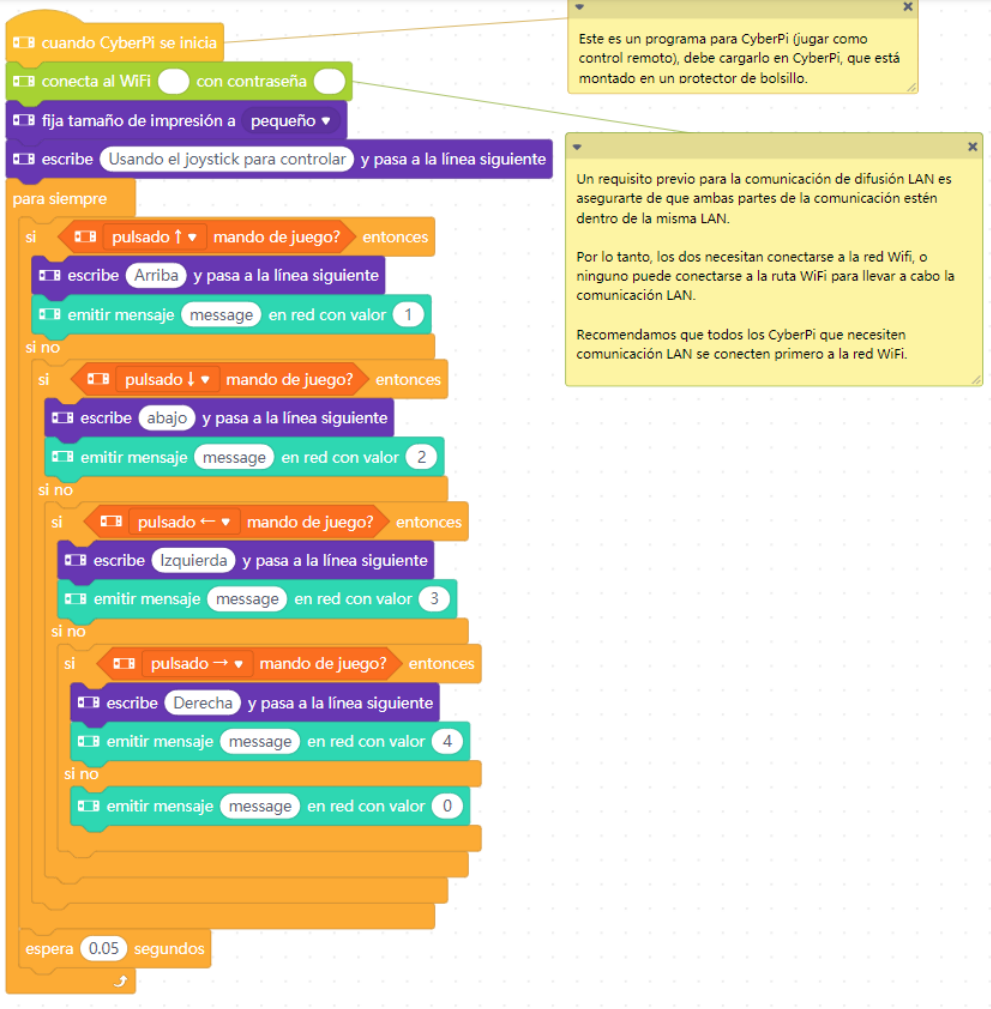
CODIGO EN EL CYBERPI QUE HARÁ DE CONTROL REMOTO
{{@12107#bkmrk-pere-manel-verdugo-z}}
RESULTADO
El contenido de esta página es de {{@12107#bkmrk-pere-manel-verdugo-z}}