1.6 Instrucciones LegoWedo parts
Encender motor
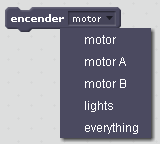
- Enciende el motor
- Tenemos varias opciones, motor A o B por si tenemos dos motores conectados (A o B según donde estén conectado en la interface, ver última fila)
- Si tuvieramos LegoWedo, también tiene luces pero en este curso lo omitimos
Fijar fuerza del motor

- Prepara el motor a una fuerza (equivalente a la velocidad) determinada
- Valor mínimo 1 y máximo 100
- Esta instrucción se tiene que utilizar después de la anterior.
- Ejemplo:

Apagar el motor
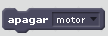
- Apaga el motor.
Encender motor por
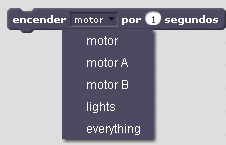
Permite encender el motor por un tiempo predeterminado
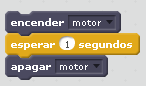
Esta instrucción es equivalente a todos los sentidos a estas tres:
Fijar dirección del motor.
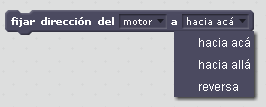
Fija el sentido de giro del motor (la traducción del español no la vemos muy acertada, pero nosotros te la traducimos ;)
- hacia acá = sentido de las agujas del reloj
- hacia allá = sentido contrario a las agujas del reloj
- reversa = sentido contrario al indicado en la última instrucción
Cuando inclinación sea.
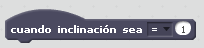
- Empieza a ejecutar el programa cuando el sensor de inclinación devuelve un 1 (es decir, cuando inclinamos el sensor hacia abajo)
- El 1 se puede cambiar por los cuatro valores del sensor 0-1-2-3-4
- Se puede cambiar el = por not=
Por ejemplo si ponemos :
not= 0 entonces ejecuta el programa cuando el sensor no está en la posición horizontal.
Cuando la distancia sea.
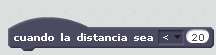
El programa correspondiente se ejecuta cuando el sensor detecta
un objeto a menos de 20
Se puede cambiar el 20 por supuesto, y el símbolo < por >
Distancia

Variable que devuelve el sensor distancia entre 0 y 100 (el 0 está algo alejado del sensor)
Inclinación

Variable que devuelve el sensor inclinación
- 0 = Sin inclinación, horizontal
- 1 = Inclinado hacia abajo
- 2 = inclinado hacia la derecha
- 3 = inclinado hacia arriba
- 4 = inclinado hacia la izquierda