Evitando obstáculos
El sensor de distancia
El kit básico de Cutebot incluye un sensor de distancia. Se trata de un accesorio conectable al frontal de Cutebot mediante cuatro pines marcados en la placa como "SONAR". El funcionamiento de la placa se basa en la emisión de ultrasonidos y en la recepción de los ecos generados cuando las ondas rebotan contra objetos cercanos.
 El sensor de distancias debe conectarse en el puerto marcado como "SONAR" y no en el marcado como "IIC". Es muy frecuente confundirse, ya que ambos conectores se encuentran juntos.
El sensor de distancias debe conectarse en el puerto marcado como "SONAR" y no en el marcado como "IIC". Es muy frecuente confundirse, ya que ambos conectores se encuentran juntos. El bloque que proporciona la medida de la distancia detectada por el sensor es Sensor de distancia cm HC-SR04, y se encuentra en el menú de bloques de Cutebot. La medida proporcionada por el sensor puede ajustarse en cm y en pulgadas.
El bloque que proporciona la medida de la distancia detectada por el sensor es Sensor de distancia cm HC-SR04, y se encuentra en el menú de bloques de Cutebot. La medida proporcionada por el sensor puede ajustarse en cm y en pulgadas.
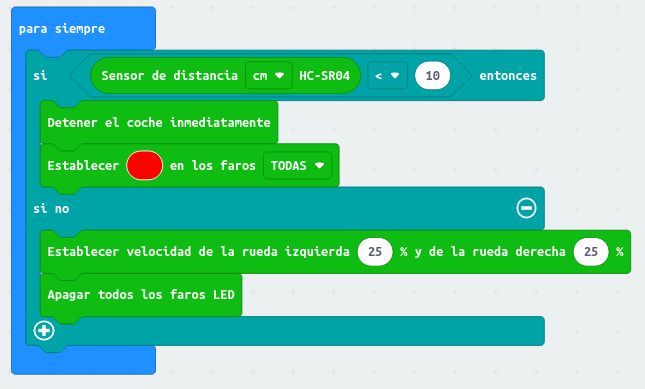
El programa mostrado sobre estas líneas es el código básico que detiene el movimiento de Cutebot al encontrar un obstáculo. Cuando el sensor de distancia detecta un obstáculo a menos de 10 cm, el coche se detiene por completo y enciende las luces rojas. En caso de no encontrar ningún obstáculo, el robot simplemente se mueve hacia adelante con las luces apagadas.
Detección y evitación de obstáculos
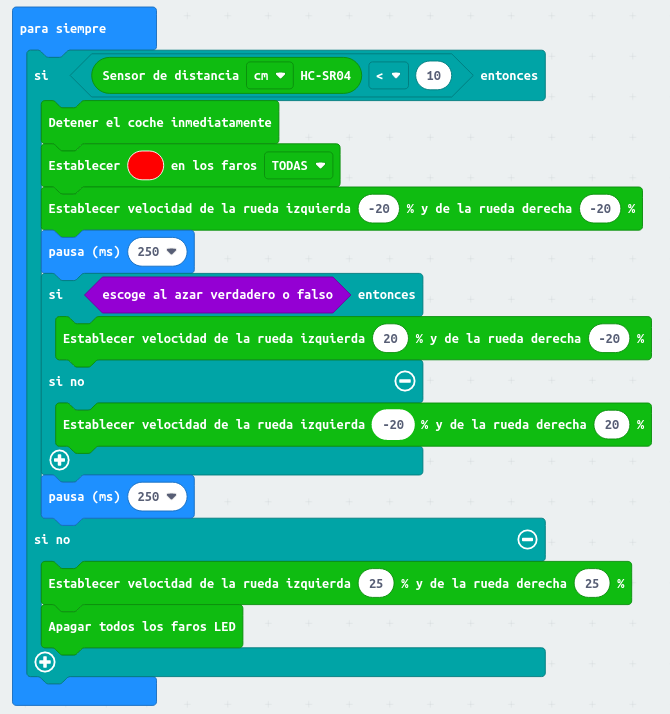
Es posible refinar el código para que Cutebot no se detenga ante un obstáculo, sino que lo esquive. Para ello haremos que cuando el robot se encuentre con un obstáculo, haga un giro al azar a la izquierda o a la derecha durante 250 ms y continúe con la ejecución del programa.

Un ligero retroceso antes de empezar a girar puede mejorar el comportamiento del robot.