Rover marciano
Programemos un robot de exploración a control remoto. Serán necesarias dos placas micro:bit, una receptora montada sobre Cutebot y una emisora a modo de mando de control remoto.
Además, Cutebot enviará a la placa de control la información que capten sus sensores durante las exploraciones.
En primer lugar, es preciso que ambas placas ajusten la radio Bluetooth en los mismos grupo y banda de frecuencia. Los bloques necesarios se encuentran en el menú Radio. El siguiente código es por lo tanto común a la placa emisora y a la receptora.

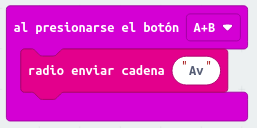
Vamos ahora con el emisor. Cuando pulsemos los botones A+B, el rover debe avanzar. Para ello le enviaremos por radio una cadena de texto con el código "Av".
Al pulsar el botón A el mando enviará un código "Iz", que indicará un giro a la izquierda. De la misma forma, Al pulsar el botón B el mando enciará un código "De", que indicará un giro a la derecha.