3.1 Pasos previos
Los pasos al detalle lo explica en https://tecnoloxia.org/mclon/estrutura/pasos-previos/ pero con la propuesta de Catedu sólo tenemos que seguir los siguientes pasos:
3.1.1 Lo que tienes que hacer tú
Tienes que doblar los pines de los sensores siguelíneas para que queden perpendiculares al sensor:
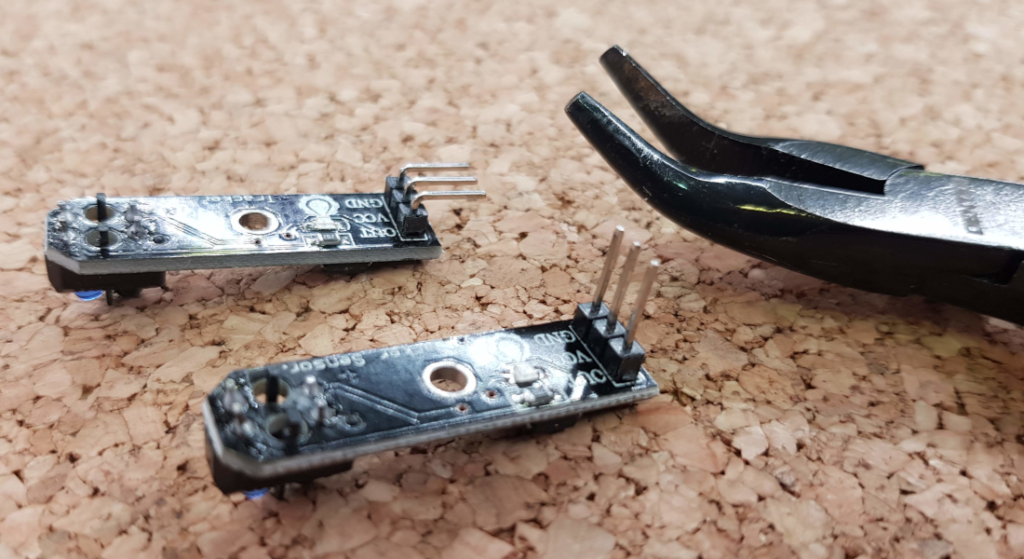
Fuente: https://mclon.org Maria L CC-BY-SA
3.1.2 Recomendaciones
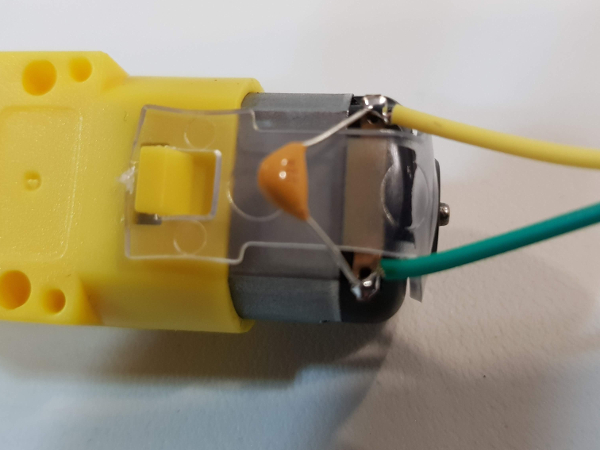
Fuente: https://mclon.org Maria L CC-BY-SA
También es conveniente que con un soldador caliente fijes los tornillos en las piezas impresas 3D, te facilitará el montaje (no te pases calentando) o si el orificio es muy grande, usar un pegamento para fijar la tuerca a la pieza 3D:
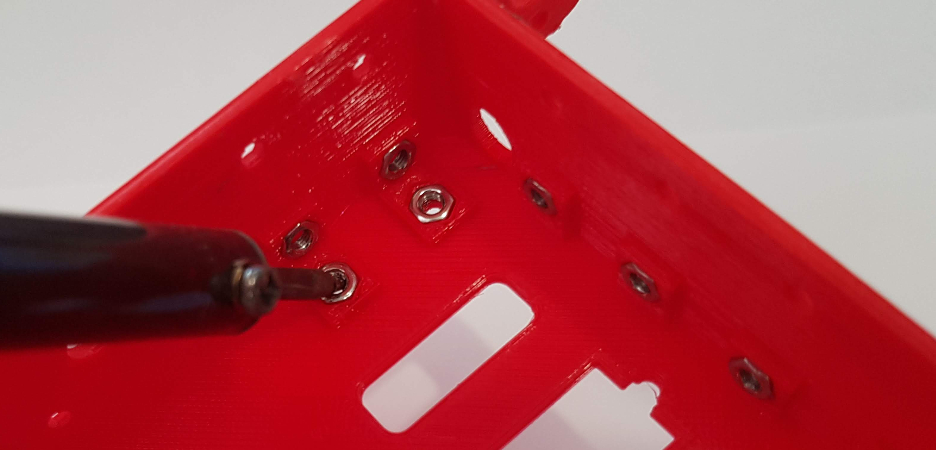
uente: https://mclon.org Maria L CC-BY-SA
3.1.3 Ya realizado por Catedu
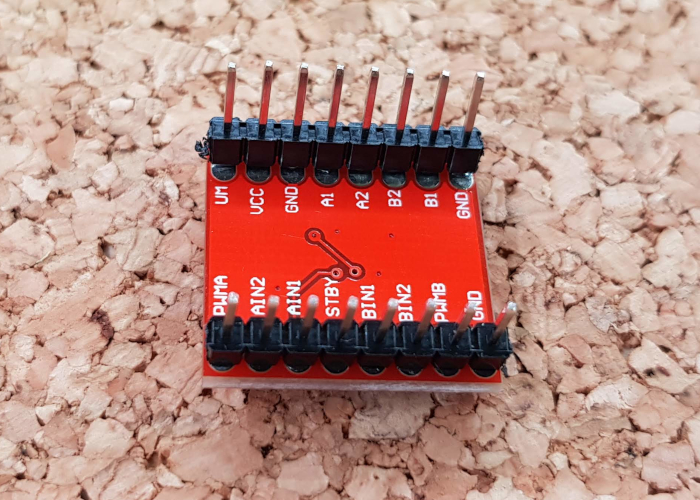
Fuente: https://mclon.org Maria L CC-BY-SA
3.1.4 Cosas que no es necesario hacer
En https://tecnoloxia.org/mclon/estrutura/pasos-previos/ dice que hay que soldar los pines Echo y Trg del sensor ultrasónico, esto no es necesario hacerlo pues al tener la placa Protoboard, juntaremos los dos en el miso pin

Fuente: https://mclon.org Maria L CC-BY-SA