3.2 Comenzamos
El montaje de este robot es complejo. En CATEDU hemos intentado ayudar a distancia a quienes han tenido problemas, y es muy difícil hacerlo a distancia, por ello este curso online esta sin tutorización a cambio, si logras montar el robot y que funcione, te lo quedas. No está mal ¿no?

No te desesperes si al final después de montar todo, las pruebas del test del apartado 4 no te funciona, hay que revisar muy bien las conexiones.
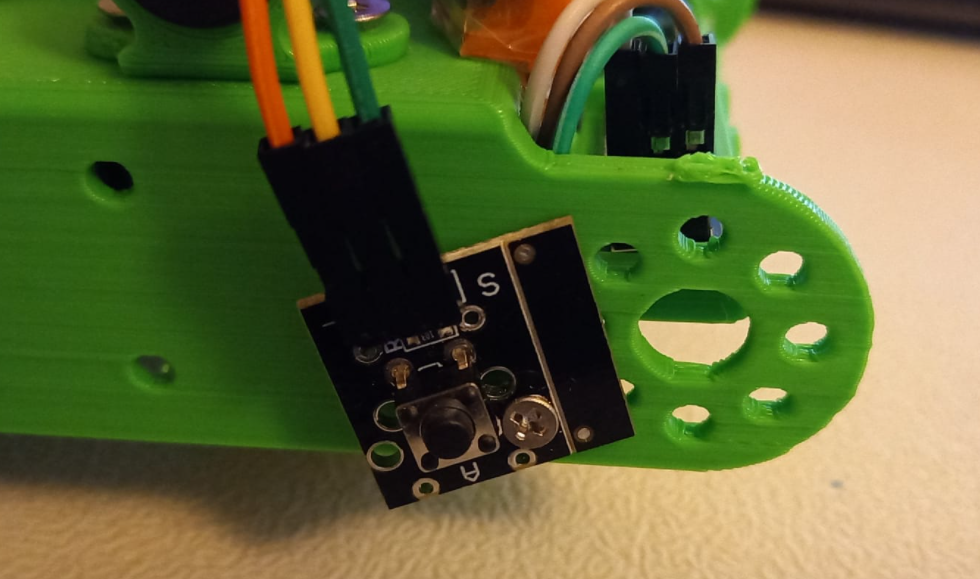
Una manera de asegurarte, es ir montando una de estas páginas de este capítulo, y pasar al test correspondiente del capítulo 4, no pasar al siguiente página sin asegurar el anterior. Como en la figura, se conecta el zumbador y el pulsador, se testea que funcione, y se pasa al siguiente componente:
El resultado final tiene su complejidad:
3.2.1 Seguidor sigue líneas y bola loca

Fuente: https://mclon.org Maria L CC-BY-SA
Fuente: https://mclon.org Maria L CC-BY-SA
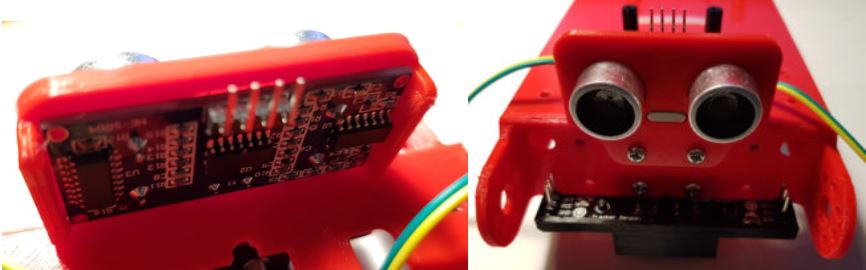
3.2.2 Sensor ultrasonidos
3.2.3 Motores y ruedas
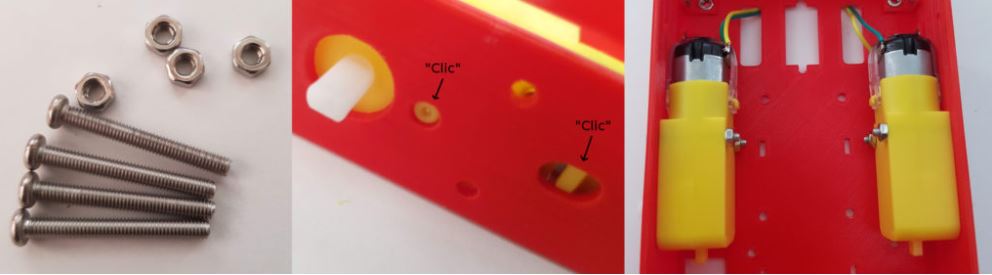
Fuente: https://mclon.org Maria L CC-BY-SA
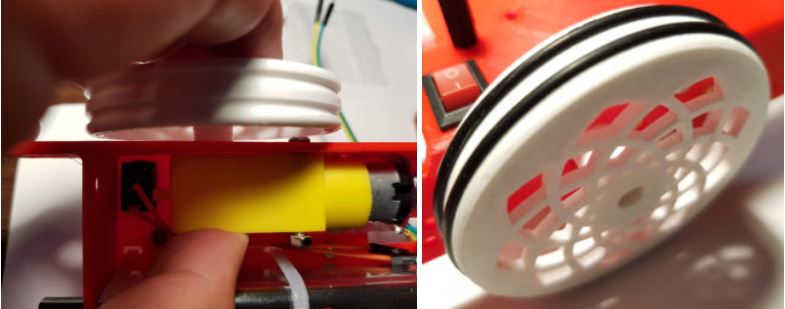
Fuente: https://mclon.org Maria L CC-BY-SA
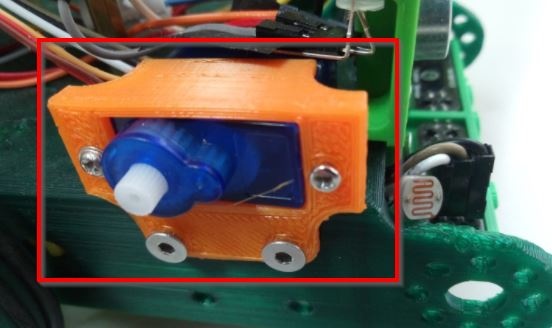
3.2.4 placa y accesorios
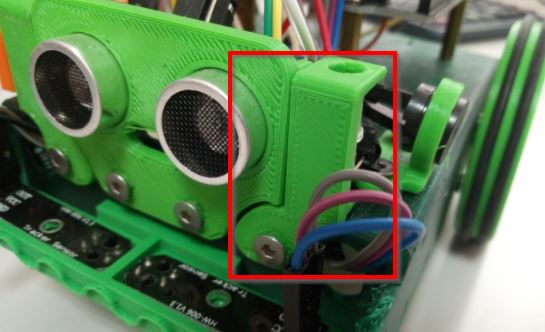
Pon el soporte del servo al lado izquierdo (mirándolo a los ojos el ultrasonido)
El pulsador lo fijamos con un tornillo de punta o con pegamento de pistola
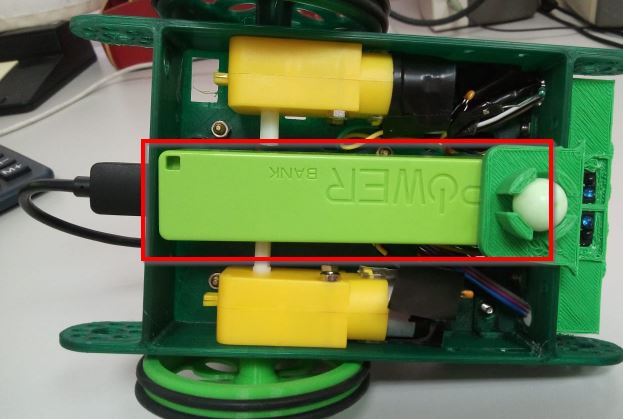
3.2.5 Powerbank
El Powerbank se sujeta muy bien, pues en un extremo tiene el cable USB, en el otro extremo tiene la bola loca, es recomendable que el lado visible del Powerbank sea el que tenga el led que indica la carga (en la foto me he equivocado) :
Para fijarlo bien ponemos una brida :
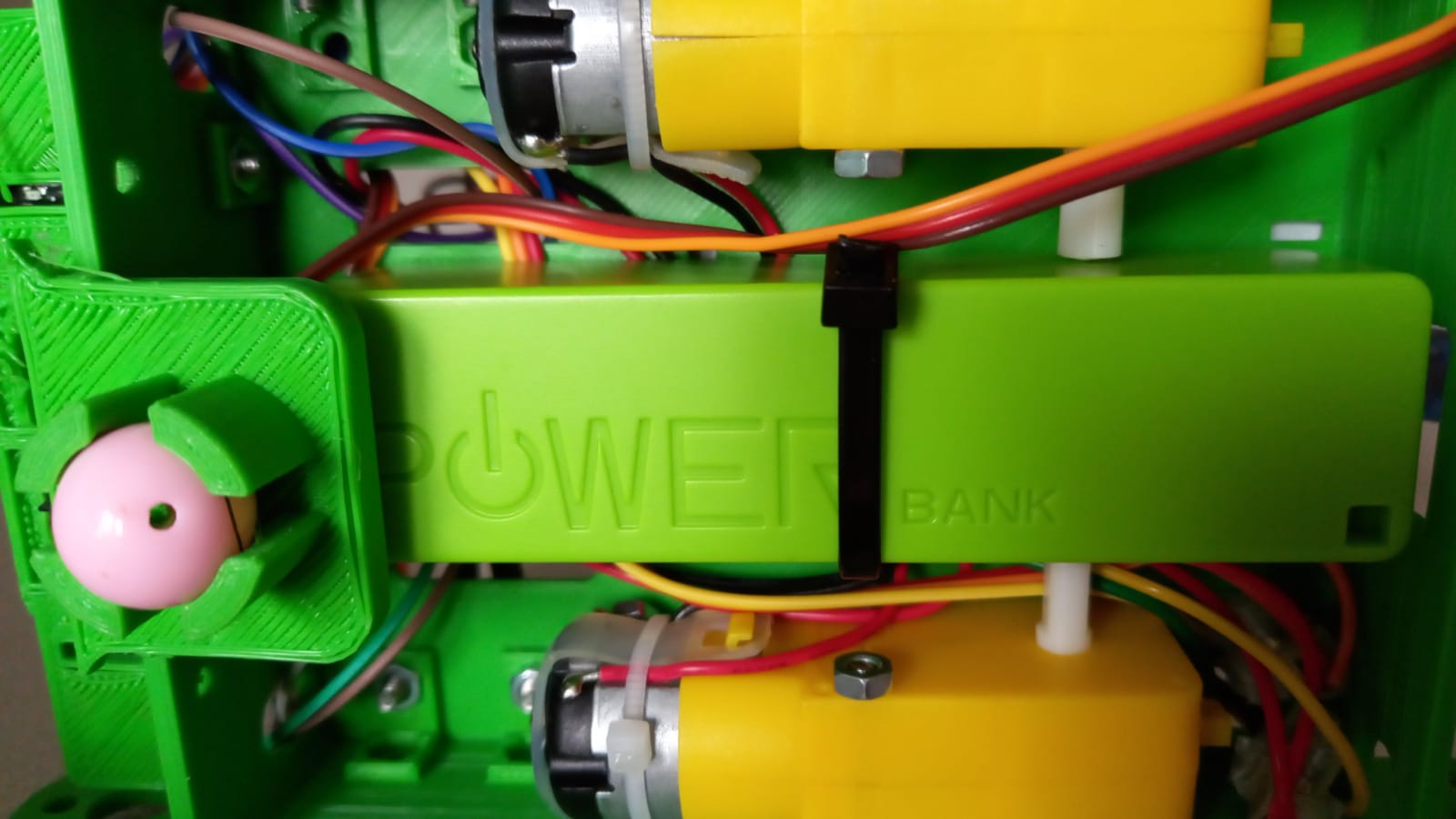
En teoría no hace falta sacarlo nunca :
- Carga: Conectar el cable USB en el orificio microusb

- Conexión y desconexión del mClon por el puerto USB grande

3.2.6 Placa Protoboard
