3.4 Cableado motores
Tenemos la placa protoboard de 400 puntos que están conectados internamente están conectados
- Los pines horizontales superiores e inferiores
- En este tutorial las líneas rojas serán +5V Ard
- Las líneas negras las haremos GND
- Los pines verticales del conjunto de agujeros de arriba (se han marcado 2 líneas azules) no se tocan con las otras del banco de abajo
![2022-03-18 20_10_51-Untitled Sketch 2.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-10-51-untitled-sketch-2-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
Esta placa protoboard cabe muy bien en el chasis pero es justo para nuestros chips :
- Los del driver motor B6612FNG son 8 cada lado
- Los del 7404 son 7 cada lado
- El arduino nano son 15
En total los 30 no sobra ni falta ninguno :
![2022-03-18 20_14_40-Untitled Sketch.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-14-40-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
3.4.1 Driver motor B6612FNG y 7404
Primero conectaremos las alimentaciones :

Fuente: https://mclon.org Maria L CC-BY-SA
Al alimentar mClon con PowerBank, la tensión de la pila le llega directamente al Arduino nano, luego alimentamos Vm con los 5V del Arduino

Luego conectando las alimentaciones sería este dibujo, fíjate que hemos conectado un cable exterior para unir las dos líneas de 5V Ard:
![2022-03-18 20_46_15-Untitled Sketch.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-46-15-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
Esta todo muy justo, no sobra pero no falta ninguna de las 30 columnas
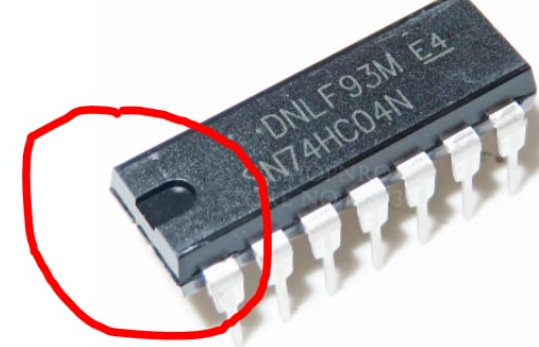
Asegúrate de la posición del 74HC04, la muesca tiene que mirar el Driver motor B6612FNG (el rojo):
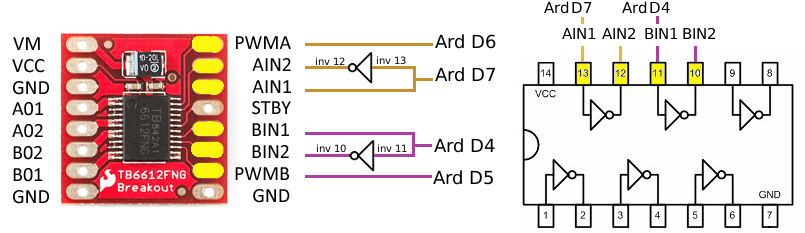
Y ahora conectamos los pines de velocidad y de dirección :
Fuente: https://mclon.org Maria L CC-BY-SA
Es decir, estos cables que indican en la siguiente figura :
ATENCIÓN, no se han dibujado las conexiones anteriores, para simplificar los dibujos, es decir ,no quites los cables anteriores
![2022-03-18 20_28_56-Untitled Sketch.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-28-56-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
![2022-03-18 20_32_59-Untitled Sketch.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].png](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-18-20-32-59-untitled-sketch-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.png)
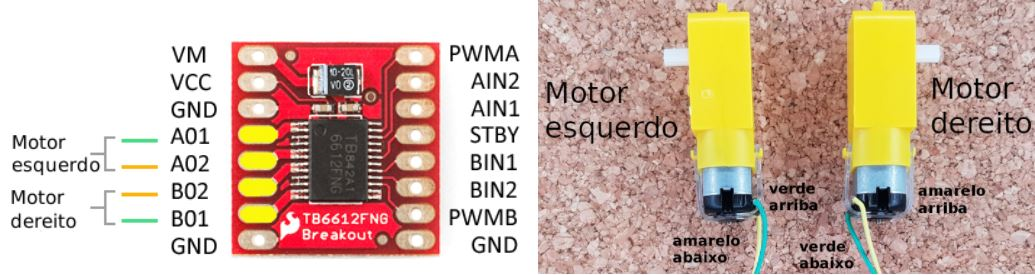
Ahora conectamos los motores OJO CON LA POLARIDAD si te equivocas, el motor girará al revés :
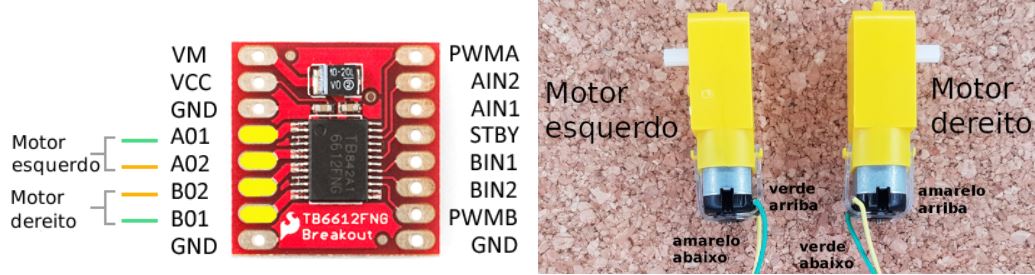
Fuente: https://mclon.org Maria L CC-BY-SA
Aquí podemos poner los condensadores de 0.1µF
![2022-03-21 12_05_54-MCLON.fzz_ - Fritzing - [Vista de Protoboard (placa de Prototipos)].jpg](https://libros.catedu.es/uploads/images/gallery/2022-03/2022-03-21-12-05-54-mclon-fzz-fritzing-vista-de-protoboard-placa-de-prototipos.jpg)
P: ¿Pero a donde conecto el cable verde y amarillo? ¿Amarillos al A02 y B02 y verde A01 y B01 o al revés?
R: RealmenteEl correcto es el de esta imagen, pero realmente no importa mucho, si un motor va al revés, cambia la polaridadpolaridad.